

Астрономический вестник, 2022, T. 56, № 6, стр. 371-388
Пылевой комплекс для исследований динамики пылевых частиц в приповерхностной атмосфере Марса
А. В. Захаров a, *, Г. Г. Дольников a, И. А. Кузнецов a, А. Н. Ляш a, F. Esposito b, C. Molfese b, I. Arruego Rodríguez c, E. Seran d, M. Gaudefroy d, А. Е. Дубов a, И. В. Докучаев a, М. Г. Князев a, А. В. Бондаренко a, В. М. Готлиб a, В. Н. Каредин e, И. А. Шашкова a, М. Е. Абделаал a, А. А. Карташева a, А. В. Шеховцова a, С. А. Бедняков a, В. В. Барке a, А. В. Яковлев a, В. А. Грушин a, С. И. Попель a, О. И. Кораблев a, Д. С. Родионов a, Н. С. Даксбери f, О. Ф. Петров g, Е. А. Лисин g, М. М. Васильев g, А. Ю. Поройков h, Н. Д. Борисов i, F. Cortecchia j, B. Saggin k, F. Cozzolino b, D. Brienza l, D. Scaccabarozzi k, G. Mongelluzzo b, G. Franzese b, C. Porto b, A. Martín Ortega Rico c, N. Andrés Santiuste c, J. R. de Mingo c, C. I. Popa b, S. Silvestro b, J. R. Brucato m
a Институт космических исследований РАН
Москва, Россия
b INAF – Astronomical Observatory Capodimonte
Naples, Italy
c INTA
Madrid, Spain
d LATMOS
Paris, France
e СКБ КП ИКИ РАН
Таруса, Россия
f George Mason University
VA, Fairfax, USA
g Объединенный институт высоких температур РАН
Москва, Россия
h Национальный исследовательский университет МЭИ
Москва, Россия
i ИЗМИРАН
Троицк, Россия
j INAF-OAS
Bologna, Italy
k Politecnico di Milano
Milano, Italy
l INAF-IAPS
Rome, Italy
m INAF – Astrophysical Observatory of Arcetry
Florence, Italy
* E-mail: zakharov@iki.rssi.ru
Поступила в редакцию 06.06.2022
После доработки 09.06.2022
Принята к публикации 23.06.2022
- EDN: CSOWXH
- DOI: 10.31857/S0320930X22060068
Аннотация
Прибор Пылевой Комплекс (ПК) создан для установки на посадочную платформу проекта ЭкзоМарс. Цель эксперимента – изучение динамики пылевых частиц приповерхностной атмосферы Марса и основных физических параметров приповерхностной среды, влияющих на их динамику. Прибор позволяет регистрировать пылевые частицы в приповерхностной атмосфере Марса, определять основные их параметры и измерять некоторые электрические характеристики плазменно-пылевой среды, связанные с динамикой пылевых частиц вблизи поверхности Марса. В статье приводится описание прибора, его блоков, датчиков, характеристики измеряемых параметров, основные элементы программы измерений.
ВВЕДЕНИЕ
Одной из важнейших компонент атмосферы Марса являются пылевые и аэрозольные частицы, размеры которых могут составлять от десятков нанометров до десятков микрон (Tomasko и др., 1999). Их формирование и движение сопровождает процессы, связанные с выветриванием грунта, перераспределением компонент поверхностного слоя, изменением прозрачности атмосферы и, в конечном итоге, изменением климата. Ветер может поднимать с поверхности и более крупные пылевые частицы размером до сотен микрометров в диаметре, запуская механизмы сальтации – скачкообразного перемещения частиц в приповерхностном потоке. Кроме того, частицы миллиметрового и субмиллиметрового размера могут перекатываться ветровыми потоками по поверхности, что приводит к ее эрозии и изменению рельефа.
По данным ранее выполненных измерений известно, что даже в отсутствие ветра в марсианской атмосфере всегда имеется значительное количество взвешенных пылевых частиц (Fenton и др., 2007). Плотность пылевой компоненты атмосферы вблизи марсианской поверхности изменяется в зависимости от сезона, широты, наличия локальных или глобальных штормов и никогда не падает до нуля. На средних широтах в спокойных условиях концентрация частиц в атмосфере оценивается в 1–2 см–3 (Moroz и др., 1993), что в массовом выражении составляет ~1.8 × 10–7 г м–3. Эта величина значительно возрастает во время пылевых бурь, достигая ~7 × 10–2 г м–3. Переносимая в атмосфере пыль существенно влияет на динамическую и термодинамическую эволюцию атмосферы и приповерхностного слоя Марса (Korablev и др., 1993; Мороз и др., 1991). Ветровой перенос пыли, участвуя в суточных, сезонных и годовых широкомасштабных изменениях атмосферной циркуляции, играет ключевую роль в формировании общего климата Марса и локальных метеоусловий (Smith, 2008). В атмосфере Марса частицы пыли поглощают и рассеивают тепловое и солнечное излучение, а также могут адсорбировать летучие компоненты, выступая в качестве центров конденсации для H2O и CO2 (Vandaele и др., 2019). Эти физические процессы и явления в значительной степени определяют тепловую структуру, тепловой баланс и циркуляционные процессы в атмосфере (Jakosky, Martin, 1987). Во время пылевой бури более 80% солнечного излучения может поглощаться пылью, и этот фактор становится определяющим для температурного режима Марса.
Экспериментальное изучение ветропылевого потока в приповерхностном слое Марса позволяет получить количественные данные, крайне необходимые для понимания природы явлений, связанных с подъемом пылевых частиц в атмосферу, выявления закономерностей их движения и выяснения возможных механизмов формирования пылевого облака, вихря, шторма, бури (Golitsyn, 1973). Пылевые вихревые смерчи и пылевые штормы широко распространены на Марсе, но пылевой цикл и его влияние на циркуляцию атмосферы до сих пор очень плохо изучены (Newman и др., 2002). Это приводит к невозможности предсказаний глобальных пылевых штормов и локальных возмущений на Марсе.
В соответствии с модельными представлениями и экспериментальными исследованиями, выполненными в условиях, приближенных к марсианским, было показано, что основными факторами, определяющими динамику пыли на Марсе, являются ветер и приповерхностное электрическое поле (Farrell и др., 2006). Скорость пылинок, взвешенных в воздухе, практически равна скорости ветрового потока. По данным измерений на космических аппаратах Viking среднее значение скорости ветра составило 9 м с–1 на высоте 1.6 м (Hess и др., 1977), а во время пылевых бурь скорость ветра увеличивалась до 25–32 м с–1. По данным аппарата Pathfinder на высоте 0.9 м эти величины составляли 5 м с–1 и 7–10 м с–1 соответственно (Perko и др., 2002). Марсианские ветры вовлекают мелкие пылевые частицы (менее десятков микрон) в атмосферную динамику, а более крупные (от нескольких сотен микрон) – в сальтационные процессы.
Когда пылинки при своем движении соприкасаются с поверхностью или между собой, они могут обмениваться зарядами посредством трибоэлектрических (фрикционных) процессов (Eden, Vonnegut, 1973). Можно ожидать, что для Марса с его сухой атмосферой и очень низким давлением такой процесс перезарядки будет происходить весьма эффективно – особенно при увеличении скорости ветра и концентрации частиц во время пылевых бурь.
Глобальная электрическая цепь марсианской атмосферы и процессы, связанные с атмосферным электричеством, во многом определяются проводимостью атмосферы, которая, в свою очередь, зависит от степени ионизации молекул атмосферы и аэрозоля. С учетом ионизационных эффектов, возникающих под действием внешних факторов на атмосферу и ее компоненты, включая пылевые частицы (Michael и др., 2008), оценочная концентрация электронов вблизи поверхности Марса составляет ~5 × 106 м–3 (Whitten и др., 1971). Модельные представления показывают, что проводимость марсианской атмосферы может принимать значения от 10–12 до 10–10 См м–1 (Harrison и др., 2016), а при развитии пылевых бурь на Марсе она может составлять ~2.5 × 10–12 См м–1 (Farrell и др., 2006). Возникновение электрических зарядов на пылинках приводит к формированию электрических полей. Моделирование этого процесса позволяет сделать вывод о том, что при скорости ветра 7 м с–1 уже через одну секунду после начала движения частиц электрическое поле может возрастать до 1 кВ м–1 , а через 10 с – до 20 кВ м–1 (Farrell и др., 2006).
Другим важным следствием присутствия пылевой составляющей в марсианской атмосфере является собственная электрическая активность атмосферы (Renno и др., 2003). Во время пылевых бурь в ней могут возникать микроразряды, вызванные трением и электризацией движущихся с большой скоростью частиц. Эти микроразряды не создают мощных импульсных сигналов, характерных для молний, но генерируют электрический шум, превышающий тепловой шум поверхности и атмосферы. Появление микроразрядов, как показано в (Yair и др., 2008), может быть обусловлено разделением зарядов на электризованных частицах под действием сильных электрических полей, о которых говорилось выше.
Таким образом, наряду с исследованиями пылевой компоненты в атмосфере Марса и на его поверхности, важной задачей является проведение сопутствующих измерений электрической проводимости, электрических полей, электромагнитных шумов в приповерхностном слое атмосферы Марса, т.е. исследование факторов приповерхностной атмосферы, определяющих поведение пылевых частиц или являющихся следствием их коллективного движения.
В течение долгого времени основной метод получения информации о пыли заключался в измерении индикатрисы рассеяния солнечного излучения в атмосфере Марса и измерении прозрачности атмосферы в различных спектральных диапазонах (Koval, Yanovitskii, 1969; Busarev и др., 2007). Первые автоматические станции – советские Марс-2, -3, американский Mariner-9 – позволили наблюдать и фотографировать развитие глобальной пылевой бури на Марсе в 1971 году. Значительный объем данных по пылевой составляющей атмосферы был получен с посадочных аппаратов Viking-1, -2 (Pollack и др., 1977; 1979; Yair и др., 2008), а также со всех последующих посадочных и орбитальных аппаратов. Особенностью полученной информации является то, что она имеет либо интегральный характер по всей толще атмосферы (Markiewicz и др., 1999), либо грубое пространственное разрешение по высоте. Важная информация, имеющая практический интерес, получена по данным марсохода Mars Pathfinder Sojourner. Эксперимент Materials Adherence Experiment (MAE) (Landis, 1996; Landis, Jenkins, 2000) позволил определить скорость осаждения пыли на элементах солнечных батарей по изменению прозрачности стекла, покрывающего элемент солнечной панели.
Отдельного упоминания заслуживают результаты, полученные с помощью лидара посадочного аппарата Phoenix (Whiteway и др., 2008). В этом эксперименте получены первые и пока единственные данные об аэрозольной структуре атмосферы на малых высотах наряду с другой важной информацией о приповерхностном пограничном слое. В частности, была обнаружена облачность на высотах ~5 км, наблюдалась стратификация аэрозольных слоев и появление приповерхностной дымки, впервые было зафиксировано выпадение осадков в виде снега, схожего с изморозью земных высотных облаков. Прибор, в силу технических особенностей, не позволял проводить прямые измерения характеристик аэрозоля на высоте ниже 200 м, и для исследования этой области были дополнительно проведены косвенные измерения рассеяния лазерного излучения лидара при помощи телекамер посадочного аппарата (Moores, 2011). В результате, несмотря на большую измерительную ошибку и нерегулярность измерений, перемещающиеся слои аэрозоля удалось обнаружить и на этих высотах.
Новые возможности для продолжения исследований марсианской пыли могут быть получены благодаря созданию прибора Пылевой Комплекс (ПК), установленного на посадочную платформу космического аппарата ЭкзоМарс-2. Прибор представляет собой комплекс датчиков для изучения динамики пылевых частиц в приповерхностной области Марса, а также сопутствующих электрических процессов в атмосфере. Приборный комплекс включает несколько блоков, позволяющих регистрировать пылевые частицы, определять их характеристики (импульс, заряд, скорость, масса, размер, концентрация), измерять электрические параметры среды: электрическую проводимость aтмocферы, напряженность электрического поля, уровень электромагнитных шумов (по которому можно судить об интенсивности микроразрядов между движущимися частицами).
В разделе “Состав прибора Пылевой Комплекс” данной статьи приводится описание прибора ПК, перечень блоков и датчиков, входящих в его состав, их назначение, размещение на посадочной платформе ЭкзоМарс-2. В разделе “Методы измерений в приборе ПК” рассматриваются методы регистрации пылевых частиц и электрических параметров приповерхностной среды. Представлено описание датчиков и чувствительных элементов прибора. Указаны основные характеристики блоков, приведен перечень измеряемых параметров, диапазоны измерений.
СОСТАВ ПРИБОРА ПЫЛЕВОЙ КОМПЛЕКС
Состав прибора Пылевой Комплекс определяется следующими задачами космического эксперимента по исследованию пылевой компоненты приповерхностной атмосферы Марса:
– исследование динамики и основных характеристик заряженных пылевых частиц: концентрации, распределения по размерам, скорости, электрического заряда;
– оценка массопереноса в приповерхностной атмосфере Марса;
– изучение механизмов заряда пылевых частиц и их дрейфа в приповерхностной атмосфере;
– регистрация источников возмущения электрического поля, пылевых образований, вихрей;
– определение электрической проводимости приповерхностной атмосферы при различных метеорологических условиях и в зависимости oт сoлнeчнoй и рaдиaциoнной aктивнocти;
– определение характеристик приповерхностного электрического поля и кумулятивной плотности заряда на пылевых частицах;
– определение связи электрической проводимости атмосферы и приповерхностного электрического поля;
– исследование электромагнитных шумов, связанных с динамикой пылевых частиц в приповерхностной атмосфере.
Пылевой Комплекс состоит из четырех блоков:
• Блок Ударный Сенсор (IS-1), имеющий в своем составе:
– пьезоэлектрические датчики (PS),
– зарядочувствительные пролетные датчики (QS),
– оптический датчик запыленности (OS);
• Блок MicroMED (датчик оптической регистрации частиц);
• Блок ECS (датчик электрической проводимости атмосферы);
• Раскрывающаяся выносная штанга, на которой установлены:
– yзел ударных сенсоров (IS-2),
– два электрoда измeрeния электрического поля (EF-1 и EF-2),
– антенна для измeрeния электромагнитной активности (EMA).
Блок-схема Пылевого Комплекса представлена на рис. 1.

Блок Ударных Сенсоров IS-1
На блоке IS-1 располагаются пьезоэлектрические (PS) и зарядочувствительные (QS) датчики, а также оптический датчик запыленности (OS). Кроме того, блок IS-1 содержит электронные платы предусилителей, амплитудно-цифровых преобразователей, системы обработки, хранения и передачи данных. Схемы предусиления, оцифровки и обработки используются для управления датчиком электрической проводимости (ECS) и датчиками, установленными на Штанге ПК. Управление блоком MicroMED и получение данных с него осуществляются согласно интерфейсу связи RS-485. Предусмотрено также измерение температур в различных точках блоков IS-1, штанги ПК и MicroMED. Блок IS-1 получает бортовое питание +28 В от посадочной платформы, принимает и отправляет команды от бортового интерфейсного преобразователя (БИП), управляет расчековкой штанги ПК.
Пьезоэлектрические датчики блока IS-1 расположены на пяти плоскостях усеченной пирамиды (4 боковые грани и 1 верхняя грань). Каждая плоскость содержит три датчика разных размеров с диаметром 4, 15 и 30 мм. Регистрация осуществляется при помощи преобразования механического импульса пылевой частицы, соударяющейся с датчиком, в электрический сигнал.
Зарядочувствительные датчики представляют собой сетки, расположенные по одной над каждой из пяти плоскостей с пьезопластинами. При пролете частицы, обладающей электрическим зарядом, на сетке индуцируется зеркально наведенный заряд, регистрируемый с помощью зарядочувствительного усилителя.
На верхней грани блока установлено оптически прозрачное стекло радиусом 10 мм, под которым располагается активный оптический датчик степени запыленности. Датчик использует собственные источники света (три длины волны). По интенсивности отраженного от поверхности стекла света рассчитывается степень его запыленности.
Внешний вид блока IS-1 представлен на рис. 2.

Блок IS-1 установлен вблизи края посадочной платформы. В зависимости от условий посадки расстояние от поверхности Марса до ударных датчиков составит приблизительно 1.0 м. Схема расположения блока IS-1, а также MicroMED и ECS на посадочной платформе ЭкзоМарс показана на рис. 3.
Рис. 3.
Схема расположения блоков IS-1, MicroMED и ECS на посадочной платформе ЭкзоМарс. Общий вид платформы (слева), чертеж фрагмента платформы (справа).

Основные характеристики блока IS-1 представлены в табл. 1.
Блок MicroMED
Назначением блока MicroMED являются прямые измерения концентрации и гранулометрического состава пылевых частиц с эквивалентным диаметром от 0.4 до 20 мкм в приповерхностной атмосфере Марса.
На рис. 4 представлен внешний вид блока MicroMED.
Рис. 4.
Внешний вид блока MicroMED. Крышка на трубке забора образцов атмосферы (в верхней части рисунка) снимается перед запуском.

Блок MicroMED установлен на верхней части посадочной платформы на расстоянии ~2 м от поверхности (см. рис. 3). На рис. 3 показана схема расположения блока посадочной платформы.
Основные характеристики блока MicroMED представлены в табл. 2.
Блок ECS
Датчик электрической проводимости предназначен для измерения электрической проводимости марсианской атмосферы.
На рис. 5 представлен внешний вид блока ECS.

Блок ECS установлен на термостабилизированной платформе посадочного аппарата на высоте приблизительно 0.9 м от поверхности Марса, с нижней стороны основания платформы (см. рис. 3).
Основные характеристики блока ECS представлены в табл. 3.
Штанга ПК
Раскрывающаяся штанга прибора ПК служит для выносного размещения нескольких датчиков с целью уменьшения влияния посадочной платформы на измерения и для возможности проведения измерений вблизи поверхности Марса. Как уже отмечалось, на штанге расположены: узел ударных сенсоров (IS-2), два электрoда измeрeния электрического поля (EF1 и EF2) и антенна анализатора электромагнитной активности (EMA).
Платы электроники датчиков штанги расположены в блоке IS-1. Штанга имеет два колена и закреплена на панели солнечных элементов посадочной платформы. Схема штанги в раскрытом виде и размещение датчиков представлены на рис. 6 и 7.
Рис. 6.
Схематическое изображение штанги в развернутой конфигурации с расположенными на ней датчиками (на рисунке изображены также аппарели для съезда ровера и фрагмент солнечной панели).


Основные характеристики блока штанги представлены в табл. 4.
МЕТОДЫ ИЗМЕРЕНИЙ В ПРИБОРЕ ПК
Датчики, включенные в состав прибора ПК, позволяют измерять характеристики пылевых частиц в приповерхностной атмосфере Марса, электрическую проводимость атмосферы, вертикальную составляющую электрического поля, регистрировать электромагнитные шумы, генерируемые при столкновениях заряженных пылевых частиц.
Регистрация пылевых частиц
Пылевые частицы приповерхностного слоя будут регистрироваться тремя методами: (1) метод прямого измерения механического импульса и электрического заряда частиц при помощи датчиков PS, (2) оптический метод регистрации отдельных частиц блоком MicroMED и (3) оптический метод оценки степени осаждения пылевых частиц на поверхность блока IS-1 при помощи оптического датчика OS.
Метод измерения механического импульса и электрического заряда пылевой частицы. В основе этого метода используется прямой пьезоэлектрический эффект. Пьезоэлектрические керамические датчики и находящаяся перед ними металлическая сетка, являющаяся индукционным датчиком пролета заряженной частицы, позволяют регистрировать: (a) механический импульс mv при ударе пылевой частицы о поверхность пьезоэлектрического датчика, (b) электрический заряд пылевой частицы (если она заряжена) и (c) амплитуду компоненты вектора скорости частицы по нормали к плоскости при ее пролете между сеткой и пьезоэлектрическим датчиком.
В приборе ПК используются два набора пьезоэлектрических датчиков (PS). Один набор датчиков PS закреплен на блоке IS-1, который установлен на посадочной платформе на расстоянии ~1 м от поверхности в месте посадки. Другой набор PS установлен в нижней части штанги (узел IS-2). Эти PS будут регистрировать пылевые частиц на расстоянии ~10–15 см от поверхности Марса (в зависимости от условий посадки).
Блок IS-1 содержит набор PS, расположенных по пяти сторонам усеченной пирамиды (рис. 2, 8). На пяти гранях расположены 15 круглых пьезодатчиков, по 3 на каждой грани. Диаметры пьезодатчиков каждой грани составляют 30, 15 и 4 мм, толщина каждого датчика – 1 мм. Датчики изготовлены из непористого композитного керамического материала ЦТС-19 (Duran, Moure, 1986). Размеры пьезодатчиков выбраны таким образом, чтобы охватить максимально широкий динамический диапазон измерений потоков пылевых частиц. Для потока с фиксированной плотностью и заданным распределением частиц по размеру частота регистрируемых соударений находится в прямой зависимости от площади пластины и ее чувствительности по импульсу. Наиболее чувствительными являются малые датчики, у которых повышение чувствительности компенсируется уменьшением площади. Такие датчики позволяют регистрировать более мелкие и медленные частицы, а в случае высокоинтенсивных потоков дают возможность улучшить временное разрешение регистрируемых событий за счет уменьшения их частоты. В то же время использование датчиков большего диаметра позволяет создать необходимую для наблюдения за низкоинтенсивными событиями суммарную апертуру при меньшем количестве каналов регистрации, что важно с учетом ограничений по массе и телеметрии.
На каждой грани блока перед PS на расстоянии 8 мм расположен индукционный датчик QS – металлическая сетка, на которой наводится зеркальный электрический сигнал при пролете через нее заряженной частицы.
Узел ударных сенсоров IS-2 расположен в нижней части штанги на расстоянии приблизительно 5–10 см от поверхности (в зависимости от особенностей рельефа в месте раскрытия штанги). PS закреплены на четырех боковых сторонах прямоугольного параллелепипеда, на каждой из которых находятся по два PS диаметром 30 и 15 мм. Характеристики этих PS совпадают с теми, которые используются в блоке IS-1. PS одинакового размера на двух противоположных сторонах параллелепипеда гальванически параллельно соединены. Вокруг этого узла на расстоянии 5–8 мм расположена индукционная сетка, которая, как и в блоке IS-1, используется для регистрации электрического заряда частицы. Таким образом, узел IS-2 имеет четыре канала измерений от PS и один канал от индукционной сетки. На рис. 8 представлена фотография узла IS-2, установленного в нижней части штанги (фотография всей штанги будет дана на рис. 19 в разделе “Измерения приповерхностного электрического поля”).

Пылевая частица, движимая ветром или электрическим полем, при попадании в пластину PS регистрируется вследствие прямого пьезоэффекта – пьезоэлектрический датчик преобразовывает механический импульс частицы в электрический сигнал в момент соударения. При этом амплитуда электрического сигнала пропорциональна механическому импульсу частицы mv. Минимальная величина импульса частицы (чувствительность), регистрируемая датчиком, составляет ~10–12 Н с, что эквивалентно, к примеру, импульсу частицы с радиусом 4 мкм, плотностью 3 г см–3, двигающейся со скоростью 1.5–2 м с–1. Динамический диапазон сенсоров по величине измеряемого импульса составляет величину более 5 порядков, что позволяет фиксировать частицы от микронного до субмиллиметрового размера. Такой диапазон измерений обеспечивается набором разнородных по чувствительности и размеру пьезосенсоров, подключаемых к предусилителям с различными коэффициентами усиления. Если частица заряжена, то на сетке QS наводится зеркальный электрический сигнал, пропорциональный заряду частицы. Комбинация двух сигналов – от сетки и от PS – позволяет определить электрический заряд частицы, механический импульс, оценить массу частиц и их скорость с точностью до cos φ, где φ – угол между направлением вектора скорости частицы и нормалью к поверхности пьезокерамической пластины. В присутствии постоянного набегающего потока частиц такой угол и, соответственно, компоненты вектора скорости могут быть оценены по соотношению частот регистрации частиц датчиками, расположенными на сопряженных гранях прибора, как для двумерного случая расположения датчиков на штанге IS-2, так и для трехмерного случая датчиков IS-1. Минимальный заряд частицы, при котором может быть зарегистрирован индукционный сигнал, составляет порядка 1000–3000 Кл (зависит от уровня электромагнитных шумов окружающей обстановки). В случае отсутствия заряда у пылевой частицы ее скорость определяется из дополнительных данных, например, показаний метеокомплекса, включенного в состав научной аппаратуры посадочной платформы. Принцип и схему регистрации механического импульса и электрического заряда пылевых частиц иллюстрирует рис. 9 (Захаров и др., 2021).

В состав блока IS-1 входит также устройство для независимой автономной калибровки и тестовых проверок пьезоэлектрических датчиков – автокалибратор, представляющий собой актюатор в виде керамической пластинки диаметром 4 мм. Актюатор жестко соединен с корпусом в районе крепления PS. На актюатор подается электрический импульс, возбуждающий механические колебания вследствие обратного пьезоэффекта, эти колебания через элементы конструкции прибора передаются на пьезопластины, имитируя ударные внешние воздействия.
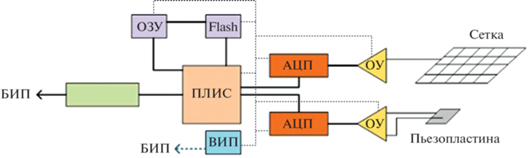
Функциональная схема работы прибора при регистрации пылевых частиц представлена на рис. 10. Сигнал с датчиков усиливается операционными усилителями (ОУ), расположенными на плате усилителей, затем оцифровывается аналогово-цифровым преобразователем (АЦП) и под управлением программируемой логической интегральной схемы (ПЛИС) записывается в оперативную память (ОЗУ). Запись осуществляется кольцевым способом так, чтобы минимизировать мертвое время, при котором не анализируется сигнал с PS. В процессе анализа данного сигнала происходит его сравнение с заданным порогом (по умолчанию порог вычисляется через среднеквадратическое отклонение и составляет 3σ по уровню шума, но может быть скорректирован командами управления). В момент регистрации очередного события ПЛИС перемещает данные в энергонезависимую Flash-память, где они ожидают отправки в блок интерфейсов и памяти (БИП) космического аппарата, через который также осуществляется питание прибора при помощи платы вторичных источников питания (ВИП).
В приборе реализованы два способа записи зарегистрированных событий.
1. При регистрации сигнала происходит запись полной формы в память прибора (800 событий/с, 8 разрядов АЦП, 0.7 мс длительность записи). В таком виде сигнал будет упакован в набор данных прибора ПК, который отправляется в БИП вместе с остальными записями событий. По умолчанию количество событий, записанных этим способом за один цикл измерений, составляет 55. Однако по внешней команде данное количество может быть уменьшено или увеличено вплоть до 65 536. Предполагается увеличение количества событий, передаваемых в таком “сыром” виде, после нескольких дней работы на поверхности Марса.
2. В связи с ограничением на объем передаваемых данных в приборе предусмотрен сокращенный режим записи данных регистрации пылевых частиц пьезодатчиками. Производится вычисление и запись максимальной амплитуды сигнала, времени прихода сигнала и его энергетической характеристики (в качестве которой выбрана совокупность интегральной величины сигнала и его длительность). Объем и структура предаваемой информации могут быть оперативно изменены по командам с Земли. По умолчанию количество предобработанных событий составляет 4000.
Ударные датчики могут работать в следующих режимах.
Штатный режим работы PS и QS предусматривает их включение на 1 час несколько раз за сутки: 4 раза в дневном режиме и 4 раза в ночном режиме. В перерывах между этими включениями выполняется включение других датчиков ПК.
В случае нештатных ситуаций (например, выход из строя одного или нескольких датчиков) существует возможность выборочного отключения датчиков. Также логика работы прибора позволяет изменять заданный по умолчанию порог детектирования событий 3σ. При необходимости время работы пьезодатчиков может быть как уменьшено, так и увеличено.
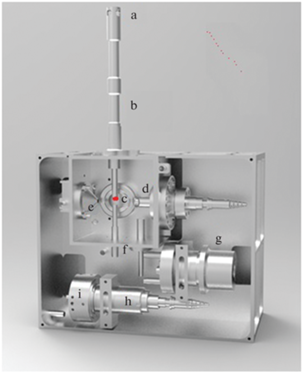
MicroMED – оптические измерения пылевых частиц. Блок MicroMED представляет собой оптический счетчик частиц (Esposito и др., 2011; 2018; Cozzolino и др., 2021; Scaccabarozzi и др., 2020; 2018; Mongelluzzo и др., 2019a; 2019b; Franzese и др., 2021), позволяющий проводить измерение размера каждой пылинки, проходящей через измерительную систему прибора. На рис. 11 показан общий вид установки MicroMED со снятой крышкой (плата электроники не показана). Насос (рис. 11g) создает поток воздуха, проходящий через входной канал (рис. 11b). Воздух и содержащиеся в нем частицы пыли всасываются через четыре отверстия, расположенные вокруг входной головки (рис. 11а), и подаются внутрь прибора, где частицы пересекают коллимированный инфракрасный луч, излучаемый лазерным диодом (рис. 11i). Чувствительный объем, в котором происходит регистрация частиц (рис. 11с), составляет примерно 1 × 1 × 0.3 мм3 (Mongelluzzo и др., 2021). Фотодиод регистрирует сигналы световых импульсов, рассеянных аэрозольными частицами. Электронника прибора анализирует эти импульсы, подсчитывает количество частиц и определяет их размер. Результатом измерения являются концентрация N [шт./см3] и гранулометрический состав N(r). Измеряемая концентрация частиц составляет от одной до нескольких сотен частиц на кубический сантиметр, прежде чем эффекты совпадения станут значительными. Размер (диаметр) частиц, измеряемых этим методом, составляет от 0.4 до 20 мкм. Продолжительность одного цикла измерений не превышает 520 с. В процессе измерений уровень излучения калибруемого лазерного диода контролируется специальным детектором.
Рис. 11.
Блок MicroMED. Общий вид со снятой крышкой: (а) входная головка, (b) входной канал, (c) сенсорное пятно, (d) система лазерного излучения, (e) световая ловушка, (f) выходной канал, (g) насос, (h) оптика, (i) узел лазера.
Физические испытания и калибровка блока MicroMED проводились в камере, моделирующей марсианские условия в атмосфере 97% CO2 при давлении 6–7 мбар, в INAF, Неаполь (Cozzolino и др., 2020). Для калибровки использовались сферические частицы SiO2 калиброванных размеров: от 0.4 до 30 мкм.
На рис. 12 представлены результаты испытаний блока MicroMED – экспериментальные гистограммы распределения частиц по размерам c использованием тестовых калиброванных частиц с размерами 1.93 мкм и 10.7 мкм.
Рис. 12.
Экспериментальные гистограммы распределения частиц по размерам для тестовых частиц с размерами 1.93 мкм (слева) и 10.7 мкм (справа).

Для блока MicroMED предусмотрены следующие режимы работы. Согласно стандартной циклограмме (базового сценария) работы прибора на поверхности Марса, блок MicroMED включается каждые 2 часа в дневное время (всего 4 включения, каждое подразумевает 3 пуска) и один раз ночью. При этом могут быть реализованы три различных режима работы: режим измерений (номинальный режим) и два режима калибровки: оптическая (лазерная) калибровка и режим калибровки насоса. Режимы калибровки обеспечивают калибровку в течение всей миссии. Каждый режим определяется рядом параметров, которые можно загрузить с Земли и настроить в процессе работы прибора на поверхности Марса.
Измерения при помощи оптического датчика запыленности. Для контроля степени запыленности и оценки скорости осаждения пылевых частиц из атмосферы на горизонтальную поверхность блок IS-1 снабжен светодиодным оптическим датчиком запыленности (OS). Этот датчик производит измерения коэффициента отражения от слоя пылевых частиц, осажденных на стеклянную прозрачную пластину на верхней грани блока (см. рис. 8). Датчик реализован на отдельной микросхеме, включающей высокочувствительный оптический детектор и светоизлучающие диоды на следующих длинах волн:
Над микросхемой расположена стеклянная пластина, на которую могут оседать пылевые частицы приповерхностной среды. Сигнал с оптического датчика запыленности формируется как сумма нескольких составляющих: отражение светового сигнала зондирующего излучения диода от поверхности стекла (отражение Френеля), отражение сигнала лазера от слоя пыли, осажденной на внешней поверхности стекла, объемное рассеяние от взвешенных частиц в некоторой области над поверхностью стекла, фоновая засветка от солнечного излучения, попавшего на стекло. На рис. 13 представлена схема измерения коэффициента отражения.

По характеру и величине сигнала с оптического датчика запыленности можно судить о плотности оседающих пылевых частиц и ее динамике в ходе космического эксперимента. В микросхеме предусмотрена компенсация фонового излучения, однако более точные данные могут быть получены ночью, при отсутствии внешнего освещения. Френелевское отражение измерено заранее и используется в качестве калибровочной величины. По сигналам фотоприемника, полученным на различных частотах лазера, можно оценить плотность осаждения пылевых частиц, цвет плотного осадка, минеральный состав частиц.
На рис. 14 слева показана верхняя грань блока IS-1 в процессе калибровки по симуляторам марсианской пыли. Симуляторы создавались на основе имеющихся гранулометрических данных и данных по элементному составу марсианского грунта. Калибровка проводилась по измерению сигнала при различном массовом значении осадка. На рис. 14 справа даны результаты измерений сигнала с фотоприемника при различных условиях испытаний, последовательно меняющихся в течение 250 с. Для отмеченных номерами от 1 до 4 тонированных временных интервалов, показаны уровни сигнала:
Рис. 14.
Вид сверху блока IS-1 с датчиком запыленности, на котором находится образец аналога марсианской пыли (слева). Результат измерений сигнала с фотоприемника датчика запыленности при различных условиях на поверхности стекла (справа).
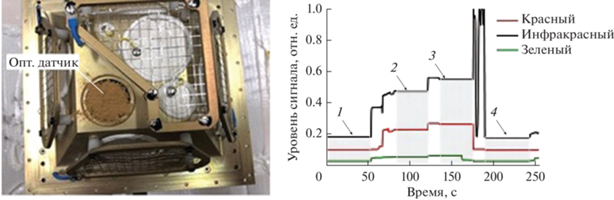
1. – отраженного от чистой (незапыленной) поверхности стекла (0–53 с);
2. – отраженного от поверхности при добавлении порции андезита (83–121 с);
3. – при добавлении еще одной такой же порции андезита (136–175 с);
4. – после очистки поверхности стекла (аналог интервала 1, 192–244 с).
В результате калибровки подобраны оптимальные значения мощности зондирующего излучения.
Дополнительно проводилась калибровка по измерению коэффициента объемного отражения от частиц пыли, взвешенных в воздушном потоке, создаваемом в специально сконструированной аэродинамической трубе (рис. 15).

В аэротрубе блок IS-1 был установлен таким образом, чтобы датчик запыленности оказался направлен перпендикулярно набегающему потоку. При установившейся скорости в поток вбрасывались последовательно три одинаковые порции аналога марсианской пыли (андезит). Результаты измерений представлены на рис. 16 слева.
Рис. 16.
Слева: характерный вид зависимости изменения интенсивности отраженного светового сигнала J в потоке частиц андезита в аэротрубе при увеличении их концентрации при вбрасывании порций частиц в поток в отмеченные последовательные интервалы времени t1, t2, t3 (интенсивность отраженного сигнала J – в относительных единицах АЦП). Справа: калибровочная кривая зависимости интенсивности отраженного сигнала J (в относительных единицах АЦП) от массы осадка для одного из каналов.

В работе датчика запыленности предусмотрены два основных режима:
– с максимальной мощностью излучения для измерений при отсутствии оседающей пыли или в случае ее удаления ветровым потоком: в этом режиме измеряется коэффициент объемного отражения от частиц, взвешенных в объеме над оптическим стеклом;
– с уменьшенной мощностью излучения для измерений в случае запыления датчика: в этом режиме измеряется коэффициент отражения от осажденного осадка.
Наиболее частое включение датчика предполагается в ночное время. Также планируется его включение сразу после посадки для оценки степени запыленности прибора из-за воздействия на грунт двигателей посадочной платформы.
Измерение электрической проводимости атмосферы
В основе измерений датчика электрической проводимости (ECS) лежит метод релаксации, реализуемый в два этапа: 1) подача короткого электрического потенциала (возмущения) на электрод и 2) измерение времени релаксации потенциала до изначального (невозмущенного) уровня. Датчик (pиc. 5) представляет собой цилиндрический электрод, подключенный к предусилителю и размещенный внутри экранирующей проводящей стальной сетки с нулевым потенциалом. Задача сетки состоит в экранировании электрода от внешнего электрического поля при обеспечении достаточно свободной аэрации внутри ECS. Детальное описание принципа измерений ECS содержится в публикации (Seran и др., 2017).
Функциональная схема измерений представлена на рис. 17, где в качестве сопротивления атмосферы Марса служит резистор R2, а емкость между электродом и сеткой имитируетcя конденсаторoм C2. Cопротивление и емкость нa входe предусилителя представлены как R1 и C1 соответственно. В начале измерения положительный или отрицательный потенциал φ0 подается на предусилитель через емкость C0. В таком случае функция изменения измеряемого потенциала φ1(t) на предусилителе будет такой:
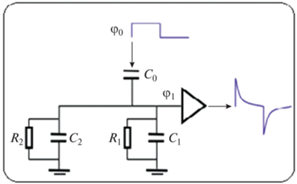
Критическим параметром, определяющим точность измерения электрической проводимости среды, является входное сопротивление предусилитeля, которое должно быть значительно больше электрического сопротивления среды. В предусилитeлe ECS входное сопротивление составляет не менее 1015 Ом.
Метод релаксации для измерений электрической проводимости был использован для измерений в земной стратосфере (Seran, Godefroy, 2019), где условия электрической проводимости воздуха близки к проводимости, ожидаемой в приповерхностной атмосфере Марса. Этот метод был также использован и проверен в земных условиях: в гранитных пещерах во фрацузских Альпах и на лабораторных установках Института радиозащиты и ядерной безопасности (Франция). В обоих случаях электрическая проводимость воздуха/газа определялась концентрацией 222Rn и егo радиоактивным распадом. На лабораторной установке удалось также проверить работу прибора в атмосфере СO2 при давлении 6 мбар, т.е. в условиях, близких к марсианским (Seran и др., 2017).
Для проверки функционирования и калибровки датчика ECS в ИКИ РАН был использован имитатор марсианской проводимости с эталонными калиброванными сопротивлениями 1011, 1012 и 1013 Ом. На рис. 18 представлен пример калибровки датчика при эталонном сопротивлении 1013 Ом.

Рис. 19.
Внешний вид штанги в развернутом состоянии (слева) и схема размещения датчиков на штанге (справа).

Предусмотрены следующие режимы работы датчика ECS. При первом включении датчика на поверхности Марса выполняется “тестовый режим”. Этот режим подразумевает работу датчика ECS одновременно с изменением электрического поля в течение 26 мин. За это время будет выполнен один цикл измерений, включающий две релаксации – с положительного и отрицательного импульса – длительностью по 13 мин. Измерения электрической проводимости атмосферы будут выполняться 4 раза в течение марсианского дня и трижды за марсианскую ночь. Предполагается по результатам анализа уточнить параметры запуска датчика и скорректировать такие параметры, как время и частота включений, длительность единичного измерения, количество измерений в одном цикле, параметр усреднения, a тaкже временной сдвиг измерений по отношению к изменению электрического поля.
Измерения приповерхностного электрического поля
Принцип измерения электрического поля приборa EF основан на использовании двух электрических электрoдов с плавающим потенциалом. Электрoды EF1 и EF2, установленные на штанге ПК, расположены на выcoтe 34 и 71 см от поверхности Марса (рис. 19), имеют цилиндрическую форму c диаметрoм 35 мм и выcoтoй 80 мм. Величина вepтикaльнoго электрического поля E в среде определяется как разность выходных напряжений предусилителей E = – (Uвых2– Uвых1)/L (L – расстояние между электродами). Каждый электрод предназначен для измерения электрического напряжения в частотном диапазоне от DC (Direct Curent) до 366 Гц. Одновременно с постоянным напряжением верхний электрод EF2 измеряет переменное напряжениe на частотах от 5 до 366 Гц c чувствительностью измерений в 429 раз выше, чем при измерениях постоянного сигнала.
Использованный в приборе принцип измерения электрического поля был предложен Seran и др. (2013) и проверен в земных условиях для измерения электрическиx полeй пылевых вихрeй, фoрмирyющихся на поверхностях высохших соленых озер в пустынных зонах Невады. Схема измерений представлена на рис. 20.

В соответствии с предложенной схемой каждый электрoд соединен через рeзиcтoрный делитель со входом операционного предусилителя, входное сопротивление которого значительно больше сопротивления делителя и превышает 1015 Ом. Таким образом, измеряемый на предусилителе потенциал φ1 будет уменьшен в R1/R2 раз по отношению к потенциалу атмосферы φ2 в точке размещения электрода (Seran и др., 2013). Koнтaктнoe сопротивление R2 является величиной, зависящей от электрической проводимости атмосферы, метода измерения и геометрии электрoдa. Оценивать его для различной метepoлoгичecкoй и paдициoнной обстановки предполагается при помощи датчика ECS (описанного в предыдущем параграфе). Величины входного сопротивления определяются величиной ожидаемого постоянного электрического поля, а также ожидаемой электрической проводимостью атмосферы. В схеме, предложенной для измерения электрических полей на поверхности Марса, входное сопротивление имеет значение 5 × 109 Ом, что позволит измерять напряжение до ±1 кВ с чувствительностью 60 мВ в случае электрической проводимости атмосферы 1012 Ом.
Предусмотрены следующие режимы работы датчиков электрического поля. Первый этап работы датчиков EF на поверхности Марса предполагается в “тестовом” режиме. Данный режим подразумевает включение датчиков одновременно с изменением электрической проводимости атмосферы на 26 мин, в течение которых будут выполнены два цикла измерений по постоянному току, содержащих два режима усреднения, и 5 измерений по переменному току. Регулярные измерения будут выполняться 4 раза в течение марсианского дня и трижды за марсианскую ночь. Предполагается по результатам анализа телеметрии уточнить необходимые параметры запуска датчиков EF и скорректировать такие параметры, как время и частота включений, длительность единичного измерения, количество измерений в одном цикле, параметр усреднения, a тaкже временной сдвиг переменных измерений.
Измерения электромагнитных излучений
Для измерений электромагнитных излучений, генерируемых в марсианской атмосфере, в прибор ПК включен анализатор электромагнитной активности (EMA). Датчик EMA регистрирует амплитуду шумового сигнала, представляющего собой совокупность излучений множества некоррелированных по времени и пространству микроразрядов, со случайными амплитудами и фазами, в диапазоне частот от 0.12 до 1.5 МГц. Сигнал имеет вид белого шума на выходе полосового усилителя.
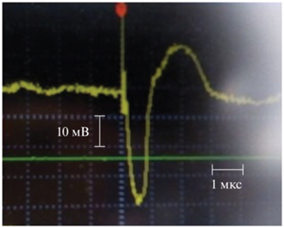
EMA имеет антенну длиной 0.9 м, расположенную в раскрывающейся штанге, и электронную плату усилителя с АЦП и контроллером, находящуюся в блоке IS-1. Измеренная полоса пропускания радиотракта с помощью генератора сигналов при максимальном усилении (80 дБ) составляет 0.12–1.5 МГц по уровню 3 дБ. Чувствительность измерений сигнала на входе усилителя состаляет 7 мкВ при соотношении сигнал/шум 6 дБ. При проверке чувствительности радиотракта датчика EMA генерировались электростатические разряды различной природы (например, создаваемые с помощью кремниевой зажигалки, трения эбонитовой палочки, движения сухого песка в пластиковой бутылке, трения отвертки с пластмассовой ручкой), что представляло собой некоторую имитацию электрических явлений в приповерхностных пылевых образованиях. При усилении радиотракта ~40 дБ на расстоянии до 1 м от приемной антенны EMA эти разряды надежно фиксировались. На рис. 21 показан пример записи сигнала с усилителя EMA на экране осциллографа при воздействии внешнего шумового электростатического разряда в лабораторных условиях.
Рис. 21.
Пример сигнала с датчика EMA при воздействии электростатического разряда (снимок с экрана осциллографа: вертикальная ось – интенсивность сигнала (10 мВ/деление), горизонтальная ось – временная развертка (1 мкс/деление).
Основные характеристики датчика EMA представлены в табл. 5.
Таблица 5.
Основные характеристики датчика EMA
| Параметры датчика EMA | Единицы измерения | Значения |
|---|---|---|
| Полоса пропускания радиотракта по уровню 3 дБ | МГц | 0.12–1.5 |
| Чувствительность измерений сигнала на входе усилителя при соотношении сигнал/шум 6 дБ | мкВ | 7 |
| Чувствительность по полю со штатной антенной | мкВ м–1 | 700 |
| Собственный шум на входе усилителя | мкВ | 2 |
Датчик может работать в следующих режимах.
1. Подсчет количества превышений порога срабатывания АЦП.
2. Мониторинг радиообстановки (длительность записи АЦП – 20 мкс, периодичность записи – от 1 до 1024 с, допустимые интервалы – 1, 4, 16, 64, 256, 1024 с).
3. Работа по триггеру (запись данных по превышению установленного порога установленной длительности).
4. Запись данных в текущий момент времени установленной длительности.
Управление прибором позволяет регулировать усиление входного усилителя в диапазоне от 0 до 80 дБ, изменять длительность записи АЦП от 20 мкс до 20 мс, регулировать порог срабатывания АЦП. Объем накопленных данных определяется циклограммой работы прибора ЕМА и в зависимости от режимов работы и радиообстановки в месте посадки может составлять от 10 до 100 кбайт в сутки.
ЗАКЛЮЧЕНИЕ
Прибор Пылевой Комплекс (ПК) создан для установки на посадочной платформе космического аппарата ЭкзоМарс-2. Прибор предназначен для исследования динамики и характеристик пылевых частиц в приповерхностной атмосфере Марса, электрических и электромагнитных эффектов, связанных с этой динамикой. Прибор способен измерять концентрацию и размеры пылевых частиц в приповерхностной атмосфере Марса, механический импульс, электрический заряд, оценивать их скорость, массу. Прибор также будет измерять электрическую проводимость приповерхностной атмосферы, величину электрического поля, уровень электромагнитных шумов, генерируемых в атмосфере Марса, связанных с динамикой пылевых частиц.
В табл. 6 приведен перечень всех датчиков, входящих в состав Пылевого Комплекса, их назначение и основные характеристики.
Таблица 6.
Датчики ПК, назначение, измеряемые величины, расположение
| Датчик | Назначение | Измеряемая величина и диапазон измерений | Расположение | Высота над поверхн., м |
|---|---|---|---|---|
| Пьезоэлектрический датчик (IS-1, IS-2) |
Детектирование ударов пылевых частиц, измерение их механического импульса | Механический импульс: 10–10–10–5 кг м с–1 чувствительность: 4.5 × 10–12 Н с |
Посадочная платформа, IS-1 |
1.0 |
| Штанга, IS-2 | 0.1–0.15 | |||
| Зарядочувствительный датчик (QS-1, QS-2) |
Детектирование зарядов пылевых частиц | от 3000 до 100 000 е– | Посадочная платформа, IS-1 |
1.0 |
| Штанга, IS-2 |
0.1–0.15 | |||
| Оптический счетчик частиц MicroMED | Концентрация частиц аэрозоля в атмосфере | 0–тысячи см–3 | Посадочная платформа (термостабилизированная) |
2.0 |
| Размер частиц (диаметр) | 0.4–20 мкм | |||
| Оптический датчик запыленности (OS) |
Контроль запыленности поверхностей прибора/посадочной платформы (измерение коэффициента отражения) | Длина волны лазера: 525 нм 670 нм 885 нм (Δλ = 50) |
Посадочная платформа, верхняя панель блока IS-1 | 1.0 |
| Датчик электрической проводимости атмосферы (ECS) | Измерение электрической проводимости атмосферы Марса | от 1010 до 1013 Ом | Посадочная платформа | 0.9 |
| Датчик электрического поля (EF-1, EF-2) | Измерение электрического поля в атмосфере Марса | 0.1–1000 В | Штанга | 0.34 и 0.71 |
| Анализатор электромагнитной активности (EMA) | Регистрация микроразрядов в диапазоне радиочастот от 0.2 до 1.5 МГц | Свыше 30 мкВ м–1 |
Штанга | 0.1–1 |
Прибор создан в Институте космических исследований РАН (Москва, Россия) и Observatorio Astronomico di Capodimonte INAF (Napoli, Italy) (блок MicroMED) в тесном сотрудничестве с Laboratoire Atmosphères, Milieux, Observations Spatiales (LATMOS) (France), а также с участием University of Naples, CNR-Instituto Nazionale do Ottica, Florence (Italy); Politecnico di Milano (Italy); INAF institutes in Bologna (OAS), Arcetri (OAA) and Rome (IAPS) (Italy); ESA – ESTEC, Noordwijk; INTA, Madrid (Spain); George Mason University (USA); Объединенный институт высоких температур РАН (Москва, Россия); Научно-производственное объединение им. С. А. Лавочкина (Химки, Россия); Специальное конструкторское бюро космического приборостроения ИКИ РАН (Таруса, Россия).
Прибор создан при финансовой поддержке Государственной корпорации РОСКОСМОС, а также ASI, Regione Campania, CNES, INTA and the Spanish National R&D Program, ESA.
Список литературы
Захаров А.В., Дольников Г.Г., Кузнецов И.А., Ляш А.Н., Дубов А.Е., Афонин В.В., Бедняков С.А., Бычкова А.С., Грушин В.А., Докучаев И.В., Карташева А.А., Попель С.И., Шашкова И.А., Шеховцова А.В., Яковлев А.В., Васильев М.М., Лисин Е.А., Петров О.Ф., Борисов Н.Д., Зеленый Л.М. Прибор ПМЛ на посадочном аппарате ЛУНА-25: плазменно-пылевые измерения в приповерхностной экзосфере // Астрон. вестн. 2021. Т. 55. № 6. С. 589–600. (Zakharov A.V., Dol’nikov G.G., Kuznetsov I.A., Lyash A.N., Dubov A.E., Afonin V.V., Bednyakov S.A., Bychkova A.S., Grushin V.A., Dokuchaev I.V., Kartasheva A.A., Popel S.I., Shashkova I.A., Shekhovtsova A.V., Yakovlev A.V., Vasiliev M.M., Lisin E.A., Petrov O.F., Borisov N.D., and Zelenyi L.M. PmL Instrument Onboard Luna-25 Lander: Plasma–Dust Measurements in the Surface Exosphere // Sol. Syst. Res. 2021. V. 55. No. 6. pp. 576–587.)https://doi.org/10.1134/S0038094621060125
Мороз В.И., Кержанович В.В., Краснопольский В.А. Инженерная модель атмосферы Марса для проекта Марс-94 (МА-90) // Космич. исслед. 1991. Т. 29. Вып. 1. С. 3–84.
Busarev V.V., Prokof’eva-Mikhailovskaya V.V., Bochkov V.V. Spectral and spectral-frequency methods of investigating atmosphereless bodies of the Solar system // Physics-Uspekhi. 2007. V. 50. № 6. P. 637–647.
Cozzolino F., Franzese G., Mongelluzzo G., Molfese C., Esposito F., Ruggeri A.C., Porto C., Silvestro S., Popa C.I., Mennella V., Scaccabarozzi D., Saggin B., Martin Ortega Rico A., Arruego Rodriguez I., De Mingo J.R., Andrés Santiuste N., Brienza D., Cortecchia F. Techniques to verify the sampling system and flow characteristics of the sensor MicroMED for the ExoMars 2022 Mission // Measurement. 2021. V. 185. 110075. ISSN 0263-2241, https://doi.org/10.1016/j.measurement.2021.110075
Cozzolino F., Mennella V., Ruggeri A.C., Mongelluzzo G., Franzese G., Popa C.I., Molfese C., Esposito F., Porto C., Scaccabarozzi D. Martian environment chamber: Dust systems injections // Planet. and Space Sci. 2020. V. 190. 104971. https://doi.org/10.1016/j.pss.2020.104971
Duran P., Moure C. Piezoelectric ceramics. Materials Chemistry and Physics, 1989. v. 15 (3-4), pp. 193-211. https://doi.org/10.1016/0254-0584(86)90001-5
Eden H.F., Vonnegut B. Electrical breakdown cause by dust motion in low-pressure atmospheres: Consideration for Mars // Science. 1973. V. 180. № 4089. P. 962–963.
Esposito F., Colangeli L., Della Corte V., Molfese C., Palumbo P., Ventura S., Merrison J., Nørnberg P., Rodriguez-Gomez J.F., Lopez-Moreno J.J., del Moral B., Jerónimo J.M., Morales R., Battistelli E., Gueli S., Paolinetti R.MEDUSA: Observation of atmospheric dust and water vapor close to the surface of Mars // Int. J. Mars Sci. and Exploration. 2011. V. 6. P. 1–12.
Esposito F., Molfese C., Cozzolino F., Cortecchia F., Mongelluzzo G., Saggin B., Scaccabarozzi D., Rodríguez I.A., Rico A.M.O., Santiuste N.A., de Mingo J.R., Schipani P., Silvestro S., Popa C.I., Dall’Ora M., Zakharov A., Dolnikov G., Lyash A., Kuznetsov I., Mugnuolo R., Pirrotta S. The characterization of airborne dust close to the surface of Mars: the Dust Complex/MicroMED sensor on board the ExoMars 2020 Surface Platform // EPSC Abstracts. 2018. V. 12. EPSC2018-1159-1.
Fenton L.K., Geissler P.E., Haberle R.M. Global warming and climate forcing by recent albedo changes on Mars // Nature. 2007. V. 446. № 7136. P. 646–649.
Farrell W.M., Renno N., Delory G.T., Cummer S.A., Marshall J.R. Integration of electrostatic and fluid dynamics within a dust devil // J. Geophys. Res.: Planets. 2006. V. 111. E01006. P. 1–10.
Franzese G., Mongelluzzo G., Cozzolino F., Porto C., Ruggeri A.C., Esposito F., Cortecchia F., Martín-Ortega A., Andrés Santiuste N., De Mingo J.R., Popa C.I., Silvestro S., Brienza D., Arruego Rodriguez I. MicroMED: study of the relation between signal durations and grain diameters // IEEE 8th Int. Workshop on Metrology for AeroSpace (MetroAeroSpace). 2021 P. 247–252. https://doi.org/10.1109/MetroAeroSpace51421.2021.9511713
Golitsyn G.S. On the martian dust storms // Icarus. 1973. V. 18. № 1. P. 113–119.
Harrison R.G., Barth E., Esposito F., Merrison J., Montmessin F., Aplin K.L., Borlina C., Berthelier J.J., Déprez G., Farrell W.M., Houghton I.M.P., Renno N.O., Nicoll K.A., Tripathi S.N., Zimmerman M. Applications of electrified dust and dust devil electrodynamics to Martian atmospheric electricity // Space Sci. Rev. 2016. V. 203. № 1. P. 299–345.
Hess S.L., Henry R.M., Leovy C.D., Ryan J.A., Tilmann J.E. Meteorological results from the surface of Mars: Viking 1 and 2 // J. Geophys. Res. 1977. V. 82. № 28. P. 4559–4574.
Jakosky B.M., Martin T.Z. Mars: North-polar atmospheric warming during dust storms // Icarus. 1987. V. 72. № 3. P. 528–534.
Korablev O.I., Krasnopolsky V.A., Rodin A.V., Chassefiere E. Vertical structure of Martian dust measured by solar infrared occultations from the Phobos spacecraft // Icarus. 1993. V. 102. № 1. P. 76–87.
Koval I.K., Yanovitskii É.G. Optical parameters of the Martian surface and atmosphere // Soviet Astronomy. 1969. V. 13. № 3. P. 499–506.
Landis G.A., Jenkins P.P. Measurement of the setting rate of atmospheric dust on Mars by the MAE instrument on Mars Pathfinder // J. Geophys. Res.: Planets. 2000. V. 105. № E1. P. 1855–1857.
Landis G.A. Dust obscuration on Mars solar arrays // Acta Astronautica. 1996. V. 38. № 11. P. 885–891.
Markiewicz W.J., Sablotny R.M., Keller H.U., Thomas N., Titov D., Smith P.H. Optical properties of the Martian aerosols as derived from Imager for Mars Pathfinder midday sky brightness data // J. Geophys. Res.: Planets. 1999. V. 104. № E4. P. 9009–9017.
Michael M., Tripathi S.N., Mishra S.K. Dust charging and electrical conductivity in the day and nighttime atmosphere of Mars // J. Geophys. Res.: Planets. 2008. V. 113. E07010. P. 1–11.
Mongelluzzo G., Franzese G., Cozzolino F., Esposito F., Ruggeri A.C., Porto C., Molfese C., Silvestro S., Popa C.I., Scaccabarozzi D., Saggin B., Martin-Ortega A., Arruego Rodriguez I., De Mingo J.R., Andrés Santiuste N., Brienza D., Cortecchia F., Merrison J.P., Iversen J.J., Performance analysis of the “MicroMED” Optical Particle Counter in windy conditions // IEEE 8th Int. Workshop on Metrology for AeroSpace (MetroAeroSpace). 2021. P. 241–246. https://doi.org/10.1109/MetroAeroSpace51421.2021. 9511691
Mongelluzzo G., Esposito F., Cozzolino F., Franzese G., Ruggeri A.C., Porto C., Molfese C., Scaccabarozzi D., Saggin B. Design and CFD analysis of the fluid dynamic sampling system of the “MicroMED” optical particle counter // Sensors. 2019a. V. 19. 5037. https://doi.org/10.3390/s19225037
Mongelluzzo G., Esposito F., Cozzolino F., Molfese C., Silvestro S., Franzese G., Popa C.I., Lubieniecki M., Cortecchia F., Saggin B., Scaccabarozzi D., Zakharov A. CFD analysis and optimization of the sensor “MicroMED” for the ExoMars 2020 mission // Measurement. 2019b. V. 147. 106824. https://doi.org/10.1016/j.measurement.2019.07.052
Moores J.E., Komguem L., Whiteway J.A., Lemmon M.T., Dickinson C., Daerden F. Observations of near-surface fog at the Phoenix Mars landing site // Geophys. Res. Lett. 2011. V. 38. № 4. L04203. P. 1–6.
Moroz V.I., Petrova E.V., Ksanfomality L.V. Spectrophotometry of Mars in the KRFM experiment of the Phobos mission: Some properties of the particles of atmospheric aerosols and the surface // Planet. and Space Sci. 1993. V. 41. № 8. P. 569–585.
Newman C.E., Lewis S.R., Read P.L., Forget F. Modeling the Martian dust cycle 1. Representations of dust transport processes // J. Geophys. Res.: Planets. 2002. V. 107. № E12. P. 6-1–6-18.
Perko H.A., Nelson J.D., Green J.R. Review of Martian dust composition, transport, deposition, adhesion, and removal // Space 2002 and Robotics 2002. ASCE Press, 2002. P. 176–189.
Pollack J.B., Colburn D., Kahn R., Hunter J., Van Camp W., Carlston C.E., Wolf M.R. Properties of aerosols in the Martian atmosphere, as inferred from Viking Lander imaging data // J. Geophys. Res. 1977. V. 82. № 28. P. 4479–4496.
Pollack J.B., Colburn D.S., Flasar F.M., Kahn R., Carlston C.E., Pidek D. Properties and effects of dust particles suspended in the Martian atmosphere // J. Geophys. Res.: Solid Earth.1979. V. 84. № B6. P. 2929–2945.
Renno N.O., Wong A.S., Atreya S.K. Electrical discharges and broadband radio emission by Martian dust devils and dust storms // Geophys. Res. Lett. 2003. V. 30. № 22. 2140. P. 1-1–1-4.
Scaccabarozzi D., Saggin B., Somaschini R., Magni M., Valnegri P., Esposito F., Molfese C., Cozzolino F., Mongelluzzo G.“MicroMED” Optical Particle Counter: From Design to Flight Model // Sensors. 2020. V. 20. 611. https://doi.org/10.3390/s20030611
Scaccabarozzi D., Saggin B., Pagliara C., Magni M., Tarabini M., Esposito F., Molfese C., Cozzolino F., Cortecchia F., Dolnikov G., Kuznetsov I., Lyash A., Zakharov A. MicroMED, design of a particle analyzer for Mars // Measurement. 2018. V. 122. P. 466–472, ISSN: 0263-2241. https://doi.org/10.1016/j.measurement.2017.12.041
Seran E., Godefroy M., Renno N., Elliott H. Variations of electric field and electric resistivity of air caused by dust motion // J. Geophys. Res.: Space Physics. 2013. V. 118. № 8. P. 5358–5368.
Seran E., Godefroy M., Pili E., Michielsen N., Bondiguel S. What can we learn from measurements of air electric conductivity in 222Rn-rich atmosphere // Earth and Space Sci. 2017. V. 4. P. 91–106. https://doi.org/10.1002 / 2016EA000241
Seran E., Godefroy M. What can we learn from the electric field and conductivity measurements in auroral atmosphere // Earth and Space Sci. 2019. V. 6. P. 136–145. https://doi.org/10.1029/2018EA000463
Smith M.D. Spacecraft observations of the Martian atmosphere //Annu. Rev. Earth and Planet. Sci. 2008. V. 36. P. 191–219.
Tomasko M.G., Doose L.R., Lemmon M., Smith P.H., Wegryn E. Properties of dust in the Martian atmosphere from the Imager on Mars Pathfinder // J. Geophys. Res.: Planets. 1999. V. 104. № E4. P. 8987–9007.
Vandaele A.C., Korablev O., Daerden F., Aoki S., and 66 co-authors. Martian dust storm impact on atmospheric H2O and D/H observed by ExoMars Trace Gas Orbiter // Nature. 2019. V. 568. P. 521–525.
Whitten R.C., Poppoff I.G., Sims J.S. The ionosphere of Mars below 80 km altitude – I. Quiescent conditions // Planet. and Space Sci. 1971. V. 19. № 2. P. 243–250.
Whiteway J., Daly M., Carswell A., Duck T., Dickinson C., Komguem L., Cook C. Lidar on the Phoenix mission to Mars // J. Geophys. Res.: Planets. 2008. V. 113. E00A08. P. 1–7.
Yair Y., Fischer G., Simões F., Renno N., Zarka P. Updated review of planetary atmospheric electricity // Space Sci. Rev. 2008. V. 137. P. 29–49.
Дополнительные материалы отсутствуют.
Инструменты
Астрономический вестник