

Физиология человека, 2022, T. 48, № 3, стр. 24-32
Влияние афферентации от контралатеральной руки на перемещение смычка при имитации игры на виолончели у испытуемых – не музыкантов
О. В. Казенников 1, *, В. Л. Талис 1
1 ФГБУН Институт проблем передачи информации
имени А.А. Харкевича РАН
Москва, Россия
* E-mail: kazen@iitp.ru
Поступила в редакцию 23.09.2021
После доработки 09.11.2021
Принята к публикации 09.02.2022
- EDN: NEFIRB
- DOI: 10.31857/S0131164622030092
Аннотация
Рассматривается движение, подобное игре на виолончели, когда прямолинейное движение правой руки со смычком должно происходить одновременно с сохранением ориентации смычка вдоль траектории движения руки. У испытуемых, не имевших опыта игры на струнных инструментах, сравнивали движения смычка поперек палки, заменявшей испытуемым инструмент, когда смычок двигался: 1) по инструменту, 2) по левой руке, лежащей на инструменте и 3) в воздухе, т.е. не касаясь инструмента. Получено, что траектория движения маркера на указательном пальце в начале смычка существенно отличалась от траектории движения маркера на конце смычка. Во всех условиях маркер на указательном пальце двигался по траектории близкой к прямой линии, с направлением близким к перпендикуляру к палке. Траектория же маркера на конце смычка сильнее отклонялась от этого перпендикулярного направления. Различия в траекториях маркеров начала и конца смычка зависели от условия движения смычка, так что наименьшие различия направления движения между началом и концом смычка были в условии движения смычка по левой руке, лежащей на инструменте. Предполагается, что у наивных испытуемых, никогда не игравших на струнном инструменте, афферентация от контралатеральной руки используется для создания представления о взаимном положении смычка и инструмента при имитации игры на виолончели.
Игра на музыкальных инструментах – это извлечение звука c помощью пальцев, рук и даже всего тела. В тоже время особенностью игры на струнных инструментах, является то, что, например, скрипач “никогда не решится изменить позу правой руки и стандартный рисунок ее межзвенных углов ни по отношению к инструменту, ни по отношению к верхней части туловища” [1]. Такая жесткая привязка руки скрипача к инструменту связана с безусловной ориентацией скрипки относительно рук скрипача за счет удержания ее положения у шеи его левой рукой. Игра на виолончели имеет большую, чем игра на скрипке связь с внешним пространством за счет того, что гриф инструмента пассивно лежит на плече исполнителя, а сам инструмент также имеет жесткий упор в пол. Кроме того, в отличие от скрипача, плечо виолончелиста, будучи, более подвижным, чем пол под его ногами, тем не менее, является существенной дополнительной опорой по причине массивности верхней части сидячего виолончелиста. Если исследованию движений скрипачей посвящено много работ [2–4], то сравнению игры на скрипке и виолончели, посвящена только одна работа [5], а игре на виолончели – только работы одной группы исследователей [6, 7]. Вместе с тем, движения при игре на струнных инструментах относятся к большой группе движений, характеризующихся “колебательной синергией движения предплечья, кисти и пальцев”, объединенных не только целенаправленностью и цикличностью, но и использованием определенного предмета, причем удерживаемого определенным хватом в руке для выполнения поставленной цели. Выявленные таким образом особенности координации рук при игре на струнных инструментах могут быть учтены при формировании других движений этого класса.
Поскольку строение руки предполагает круговое движение проксимальных суставов, то для прямолинейных движений дистальных частей руки необходимо координированное изменение суставных углов. Из геометрических соображений, можно предполагать, что при игре на струнном инструменте основной вклад в перемещение смычка в продольном направлении вносят проксимальные суставы, а прямолинейность траектории конца руки достигается координированным изменением суставных углов дистальных суставов. Задача усложняется тем, что при прямолинейном движении руки необходимо сохранение ориентации смычка, удерживаемого рукой, которое в отсутствии зрения достигается посредством гаптической афферентации от руки.
В данной работе рассматривается движение, подобное игре на виолончели, когда прямолинейное движение правой руки со смычком должно происходить с одновременным сохранением ориентации смычка вдоль траектории движения руки. Сравнивали движения смычка в правой руке при перемещении его, не касаясь инструмента-палки с движением смычка по инструменту-палке и движением смычка по левой руке, лежащей на инструменте-палке, когда афферентная информация о движении смычка поступает также от контралатеральной руки. Целью эксперимента было описать формирование прямолинейной траектории конца руки и смычка и выяснить, в какой мере дополнительная афферентная информация, возникающая при движении смычка, может влиять на координацию движения руки и на ориентацию смычка относительно руки и инструмента.
МЕТОДИКА
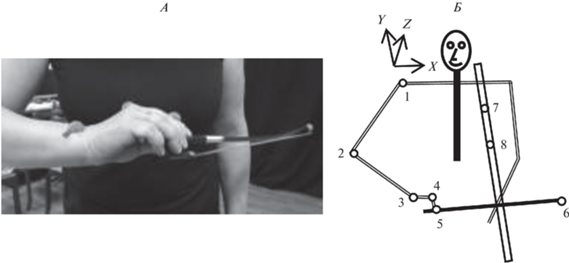
В эксперименте участвовали 7 здоровых испытуемых (возраст – 43.7 ± 18.8 лет, рост – 170.2 ± ± 10.9 см). Испытуемые стояли с виолончельным смычком (длиной 69 см) в правой руке, в то время как у левого плеча испытуемого располагалась палка длиной 159 см, которая нижним концом упиралась в пол, а верхним – свободно лежала на плече. Середина палки была обвязана мягкой тканью для придания ей мягкости руки, а кисть левой руки могла свободно лежать на палке или придерживать ее снизу в зависимости от условий эксперимента. Такая поза испытуемого с дополнительной опорой на палку-инструмент была выбрана потому, что, с одной стороны, уменьшала позные колебания испытуемого, а с другой – была более “стандартизируема”, чем положение сидя. Перед началом исследований экспериментатор показывал испытуемому, как брать смычок и после того, как испытуемый брал его соответствующим образом (рис. 1, А), ставил его руку со смычком на мягкую зону палки так, что смычок располагался перпендикулярно палке. Испытуемый следовал инструкции “перемещать смычок, сохраняя его начальную ориентацию” в 3 условиях: 1) при опоре смычком на палку (в этом случае свободно опущенная левая рука поворачивала кисть так, чтобы кисть держалась за палку снизу); 2) при опоре смычком на левую руку (в этом случае свободно опущенная левая рука поворачивала кисть так, что кисть лежала на палке сверху); и 3) без опоры, когда смычок удерживался правой рукой на высоте 3–5 см над палкой и ни на что не опирался, а левая опущенная рука свободно лежала на палке. Движения выполнялись испытуемым под метроном, установленным на частоту 60 движений в минуту, с комфортной индивидуальной максимальной амплитудой движения. Испытуемый тренировал выполнение инструкции во всех трех условиях перед началом эксперимента с открытыми и закрытыми глазами, а во время эксперимента выполнял ее с закрытыми глазами. Движение смычка в одну сторону составляло 500–1000 мс при комфортной для испытуемого амплитудой движения конечной точки руки – 30–50 см.
Рис. 1.
Схема расположения маркеров. А – расположение маркеров 3, 4, 5 на кисти. Б – схема расположения маркеров на антропометрических точках руки, а также на смычке и палке. Показана новая система координат, привязанная к плечу.
Движения регистрировали с помощью комплекса “Видеоанализ Биософт” (Россия), состоящего из двух синхронизированных видео камер с частотой̆ регистрации 50 Гц положения светоотражающих маркеров (сферической формы, диаметром 25 мм), подсвечиваемых инфракрасными источниками излучения.
Установившееся движение (примерно через 2–3 цикла после его начала) регистрировали для каждого условия в течение 2 проб по 20 с каждая, по положению 8 маркеров, установленных на правой руке, смычке и палке (рис. 1, Б), в том числе на:
1) плече (акромион);
2) локте (край суставной поверхности лучевой кости);
3) лучезапястном суставе (шиловидный отросток лучевой кости);
4) тыльной стороне кисти, на пястно-фаланговом суставе указательного пальца;
5) дистальной фаланге указательного пальца в месте схвата смычка, также служившим координатой начала смычка;
6) конце смычка;
7, 8) маркеров палки.
С целью уменьшения разброса данных, перемещения маркеров анализировали в подвижной системе координат, связанной с маркерами на плече и палке, учитывая, что движение этих маркеров было небольшим. Подвижная система координат образовывалось 3 взаимо-перпендикулярными осями (рис. 1, Б): 1) Х или “ось основного движения смычка”, направленная перпендикулярно к палке; 2) Y или “ось палки”, задаваемая двумя ее маркерами (7) и (8); 3) Z или “ось высоты”, перпендикулярная плоскости Х–Y, по координатам которой оценивали высоту маркеров над плоскостью X–Y. Движение маркеров руки в новой системе координат имело меньше вариативности, связанной с движением тела испытуемого и разницей в росте испытуемых, их положением относительно камер и расположении палки относительно самого испытуемого. При этом взаимоположение маркеров, как и изменения суставных углов от системы координат не зависело. Кроме того, использование новой системы координат помогало ввести способ оценки выполнения инструкции испытуемому, так как в идеальном случае в новой системе координат траектории движения маркера на указательном пальце в начале смычка и маркера на конце смычка должны были бы образовывать прямую линию ортогональную палке. В этом случае основное изменение положения этих маркеров должно было происходить вдоль оси X, а изменения координат этих маркеров вдоль двух других осей при перемещении смычка должны быть незначительны.
Для оценки качества выполнения инструкции определяли максимальное (МАКС) и минимальное (МИН) положение маркера в начале смычка (5) по оси Х, а затем вычисляли средние значения координат всех маркеров за все циклы движения в моменты МАКС и МИН. Для статистического анализа вычисляли смещения маркеров по каждой из трех координат, как разность между средними значениями координат маркеров в моменты времени МАКС и МИН.
Для определения преимущественного направления движения маркеров за проход смычка из траектории маркера выделяли основные и второстепенные компоненты траектории с помощью метода главных компонент. Главная компонента, на которую приходилось более 95% вариаций движения, давала аппроксимацию траектории движения маркера прямой линией, что позволяло рассчитать его угол наклона траектории к палке.
Кроме того, на основании координат маркеров вычисляли трехмерные суставные углы руки, а также углы между кистью и смычком, смычком и палкой, в том числе:
– угол в плечевом суставе, как трехмерный угол между отрезком, соединяющим маркер на палке и на плече (7–1, рис. 1, Б) и отрезком, соединяющим маркеры на плече и локте (1–2);
– угол в локтевом суставе – соответственно между отрезками (1–2) и (2–3);
– угол в лучезапястном суставе – соответственно между отрезками (2–3) и (3–4);
– угол в пястно-фаланговом суставе указательного пальца – соответственно между отрезками (3–4) и (4–5);
– угол между кистью и смычком – соответственно между отрезками (4–5) и (5–6);
– угол между смычком и палкой – соответственно между отрезками (5–6) и (7–8).
Угол между указанными отрезками вычисляли, как обратный косинус от скалярного произведения отрезков, деленный на длину каждого из них. Амплитуду изменений углов вычисляли как разность между средним значением углов в точках МАКС и МИН для всех циклов движения.
Вычисленные параметры использовали для статистического анализа. Для сравнения параметров использовали непараметрический дисперсионный анализ средних значений с повторными измерениями в разных условиях эксперимента (Friedman ANOVA). Для выявления различий использовали Вилкоксон тест. Уровень достоверности различий был установлен 0.05.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
На рис. 2 представлены траектории движения маркеров руки и смычка для одного испытуемого во всех трех условиях – движение смычка по палке (ПАЛКА), руке (РУКА) и в воздухе (В). На рис. 2 показано, что за время прохода смычка от МИН к МАКС локоть испытуемого (2) двигался по дуге окружности с центром в плечевом суставе (1), а маркеры запястья (3), основания указательного пальца (4) и начала смычка (5) двигались с небольшими вариациями в направлении близком к перпендикуляру палке во всех трех условиях эксперимента. Однако перемещения конца смычка (6) отличались от перемещения его начала (5), вследствие чего исходная ориентация смычка за время его прохода от МИН к МАКС не сохранялась.
Рис. 2.
Траектории движения маркеров руки и смычка в трех условиях эксперимента: по палке (А), по руке (Б) и в воздухе (В). Показана проекция движения на плоскость, проходящую через палку и маркер на плече, вследствие чего вертикальная линия – положение палки, по которой двигался смычок в условиях А и Б. Метка по ординате и абсциссе – 50 см. Обозначения маркеров см. рис. 1.
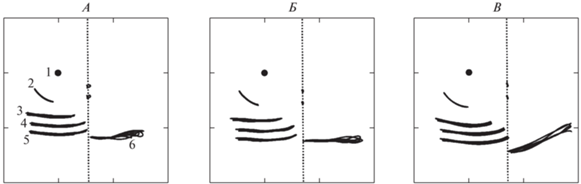
В табл. 1 представлено относительное смещение маркеров в начале (5) и на конце смычка (6) в среднем по всем испытуемым во всех условиях эксперимента по трем осям (вдоль оси основного движения смычка, поперек палки, и над плоскостью этих двух осей). По данным табл. 1 видно, что перемещение смычка в воздухе было значительно больше, чем при движении по руке и по палке, а при движении по руке больше, чем при движении по палке (табл. 1). При этом конец смычка (6) приближался к плечу больше всего при движении в воздухе и меньше всего при движении по руке (рис. 2, А–В). Маркер в начале смычка смещался в этом направлении во всех условиях незначительно (табл. 1). Попарное сравнение смещений начала и конца смычка показало, что смещение конца смычка (6) было значимо больше, чем смещение его начала (5) как при движении по палке, так и при движении в воздухе, а при движении по руке различия в смещении маркеров (5) и (6) вдоль палки были недостоверными. Попарное сравнение смещений маркеров начала и конца смычка по высоте показало, что смещение конца смычка (6) было значимо больше, чем смещение его начала (5) как при движении по руке, так и при движении в воздухе (табл. 1).
Таблица 1.
Смещения маркеров 5 (указательный палец/начало смычка) и 6 (конец смычка) по “оси основного движения смычка”, оси “палки” и “оси высоты” в условиях движения смычка по палке (ПАЛКА), руке (РУКА) и в воздухе (В) (мм)
| Параметр | Условия движения смычка | Статистический анализ | |||
|---|---|---|---|---|---|
| ПАЛКА | РУКА | В | результат Friedman ANOVA | достоверные различия, подтвержденные попарным сравнением с помощью теста Вилкоксона, p < 0.05 | |
| Смещение по оси основного движения смычка | |||||
| Маркер 5 указ. палец/начало смычка | 433 ± 37 | 445 ± 33 | 532 ± 35 | ChiSqr. (N = 8, df = 2) = 12.00, p < 0.01 | В > ПАЛКА, В > РУКА |
| Маркер 6 конец смычка | 401 ± 28 | 448 ± 30 | 523 ± 26 | ChiSqr. (N = 8, df = 2) = 9.00, p < 0.05 | В > ПАЛКА, В > РУКА |
| Результат сравнения смещения маркеров 5 и 6 с помощью теста Вилкоксона | p = 0.12 | p = 0.78 | p = 0.58 | ||
| Смещение по оси вдоль палки | |||||
| Маркер 5 указ. палец/начало смычка | –16 ± 9 | –4 ± 7 | –6 ± 13 | ChiSqr. (N = 8, df = 2) = 3.00, p > 0.22 | |
| Маркер 6 конец смычка | 124 ± 35 | 80 ± 31 | 271 ± 59 | ChiSqr. (N = 8, df = 2) = 14.25, p < 0.001 | РУКА < ПАЛКА, РУКА < В, В > ПАЛКА |
| Результат сравнения смещения маркеров 5 и 6 с помощью теста Вилкоксона | p < 0.05 | p = 0.09 | p < 0.05 | ||
| Смещение по оси высота | |||||
| Маркер 5 указ. палец/начало смычка | –5 ± 23 | 39 ± 20 | 46 ± 25 | ChiSqr. (N = 8, df = 2) = 3.25, p > 0.19 | |
| Маркер 6 конец смычка | –122 ± 69 | –94 ± 42 | –194 ± 56 | ChiSqr. (N = 8, df = 2) = 9.25, p < 0.01 | РУКА < В |
| Результат сравнения смещения маркеров 5 и 6 с помощью теста Вилкоксона | p = 0.09 | p < 0.05 | p < 0.05 | ||
Средние значения наклона траектории всех маркеров к палке во всех условиях по всем испытуемым представлены в табл. 2. По данным табл. 2 видно, что при движении смычка по палке маркер основания указательного пальца (4) и начала смычка (5) двигались практически перпендикулярно ей. Траектории же проксимальных маркеров руки – локтя (2) и запястья (3) – были наклонены к палке в среднем на 10–20 град больше, чем дистальных. При этом наклон траектории конца смычка (6) существенно отличался от наклона траектории маркеров руки во всех условиях, в том числе и от траектории движения его начала (5). Дисперсионный анализ показал, что различия в наклоне траектории для разных условий были достоверными только для маркера локтя и конца смычка. Попарное сравнение наклонов траектории показало, что наклон траектории локтя (2) к палке при движении смычком по руке был существенно меньше, чем при движении в воздухе и по палке (табл. 2), а при движении в воздухе отклонение конца смычка (6) от ортогональности увеличивалось.
Таблица 2.
Угол наклона траектории маркеров руки и смычка при движении смычка по палке (ПАЛКА), руке (РУКА) и в воздухе (В)
| Маркер | Условия движения смычка | Статистический анализ | |||
|---|---|---|---|---|---|
| ПАЛКА | РУКА | В | результат Friedman ANOVA | достоверные различия, подтвержденные попарным сравнением с помощью теста Вилкоксона, p < 0.05 | |
| Локоть | 126 ± 2 | 123 ± 2 | 125 ± 2 | Chi Sqr. (N = 7, df = 2) = 6.00, p < 0.05 | ПАЛКА > РУКА |
| Запястье | 100 ± 1 | 97 ± 1 | 100 ± 2 | Chi Sqr. (N = 7, df = 2) = 3.71, p > 0.16 | |
| Кисть | 93 ± 1 | 91 ± 1 | 93 ± 2 | Chi Sqr. (N = 8, df = 2) = 3.25, p > 0.20 | |
| Ук_палец/начало смычка | 92 ± 1 | 91 ± 1 | 91 ± 2 | Chi Sqr. (N = 8, df = 2) = 1.00, p > 0.61 | |
| Конец смычка | 75 ± 4 | 80 ± 4 | 66 ± 5 | Chi Sqr. (N = 8, df = 2) = 14.25, p < 0.001 | РУКА > ПАЛКА, РУКА > В, ПАЛКА > В |
При проходе смычка от положения МИН к МАКС происходило движение локтя испытуемого по окружности (рис. 2), что сопровождалось приведением угла в плечевом суставе на 30–40 град (табл. 3). В то же время проход смычка по палке сопровождался у одних испытуемых сгибанием, а у других – разгибанием локтевого сустава, так что амплитуда изменения угла в локте в среднем по группе испытуемых была около нуля. Тонкая подстройка для достижения прямолинейной траектории достигалась изменением угла в запястье. Указательный палец относительно кисти почти не двигался, т.е. изменения этого угла были около нуля.
Таблица 3.
Амплитуда изменения углов (град) в суставах руки, а также между смычком и указательным пальцем и между смычком и палкой в условиях движения смычка по палке (ПАЛКА), руке (РУКА) и в воздухе (В)
| Маркер | Условия движения смычка | Статистический анализ | |||
|---|---|---|---|---|---|
| ПАЛКА | РУКА | В | Friedman ANOVA | достоверные различия, подтвержденные попарным сравнением с помощью теста Вилкоксона, p < 0.05 | |
| Углы в суставах руки | |||||
| Плечо | –37 ± 3 | –36 ± 4 | –45 ± 3 | Chi Sqr. (N = 7, df = 2) = 10.57, p < 0.01 | В > ПАЛКА, В > РУКА |
| Локоть | 1 ± 5 | –1 ± 4 | 2 ± 5 | Chi Sqr. (N = 7, df = 2) = 2.00, p > 0.36 | |
| Запястье | 10 ± 2 | 11 ± 2 | 12 ± 2 | Chi Sqr. (N = 7, df = 2) = 3.71, p > 0.15 | |
| Кисть | 0 ± 1 | –1 ± 2 | –2 ± 1 | Chi Sqr. (N = 8, df = 2) = 3.25, p > 0.19 | |
| Углы ориентации смычка | |||||
| Угол между смычком и рукой | 5 ± 2 | 6 ± 2 | 2 ± 2 | Chi Sqr. (N = 8, df = 2) = 6.75, p < 0.05 | В < ПАЛКА, В < РУКА |
| Угол между смычком и палкой | –10 ± 3 | –6 ± 2 | –21 ± 4 | Chi Sqr. (N = 8, df = 2) = 14.25, p < 0.001 | ПАЛКА > РУКА, В > ПАЛКА, В > РУКА |
Сравнение углов в суставах при движении смычком по палке, руке и в воздухе показало достоверные различия для угла в плечевом суставе в зависимости от этих трех условий (табл. 3), а именно угол в плече изменялся сильнее при движении смычка в воздухе, чем при движении по палке или руке. Изменения других углов руки не зависело от условий движения смычка. При движении смычком в воздухе угол между смычком и рукой был меньше, чем в остальных двух условиях, а угол наклона смычка относительно палки при движении смычка в воздухе существенно увеличивался по сравнению с движением смычка по палке (табл. 3).
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
При движении смычка испытуемые без труда перемещали конечную точку руки почти по прямой линии (рис. 2), а основное направление движения дистальных частей руки было перпендикулярно палке-инструменту с незначительными отклонениями от этого направления. Таким образом, полученные данные подтвердили предположение о том, что прямолинейность траектории конца кисти в месте хвата смычка (5) достигалась координированным изменением угла в плечевом суставе, совместно с изменениями локтевого и лучезапястного суставов, а система управления движением учитывала афферентную информацию от разных суставов для достижения прямолинейной траектории конца руки.
В то же время, с учетом того, что непосредственная афферентная информация об угле, образуемым смычком и удерживающей его рукой, отсутствовала, траектория конечной точки смычка контролировалась хуже, чем конец руки. Если рассматривать смычок, удерживаемый испытуемым поперек инструмента, как консоль, то при проходе смычка из положения МИН к МАКС ее вес начинает все больше тянуть руку вниз, а афферентная информация о положении смычка зависит не только от текущего его положения, но и от вида хвата его пальцами испытуемого. В настоящей работе показано, что наклон траектории конца смычка к палке всегда был больше, чем наклон траектории его начала. В то же время если смычок, зажатый правой рукой, двигался по левой руке, то дополнительная афферентация от нее, по-видимому, все же использовалась для дополнительного контроля траектории конца смычка и наклон траектории конца смычка был ближе к ортогональному, чем в других условиях (табл. 2). Нельзя исключить, что не только дополнительная афферентная информация от левой руки, но и преобразование движения с унимануального в бимануальное, т.е. такое, когда афферентация от обеих рук используется одновременно [8], приводило к принципиальному улучшению движения.
Известно, что в координационных задачах этой группы движений существенную роль играют двусуставные мышцы [9], а нарушение проприоцепции приводит к нарушению координации в суставах [10, 11]. Описывая целевые движения этой группы, Н.А. Бернштейн выделял случаи, когда рабочей точкой служит не какой-нибудь пункт самой конечности, а пункт на продолжающем ее орудии (центр теннисной ракетки, боек молотка и др.), так что “при развитом двигательном навыке, несмотря на то, что эти рабочие пункты орудий лишены каких-либо возможностей для прямой сенсорной сигнализации, корригирование их движения осуществляется все же отнюдь не только посредством зрения…. Проприоцептивная оценка положения в пространстве кончика собственного пальца дается менее всего рецепторами, помещающимися на нем самом, и создается синтетически по данным проприо-афферентации всех пунктов руки, только в этом случае навык оценки положения прочно автоматизирован еще с детства” [1]. Действительно, в настоящем исследовании испытуемые, никогда не игравшие на струнном инструменте, осознавали положение смычка в пространстве не на основе зрения, а исходя из своей повседневной практики, что отличало их от подобных движений профессионального виолончелиста, выработанных им в результате упорных занятий. Более того, в настоящем эксперименте испытуемые вместо виолончели водили смычком по палке, заменявшей ее, в то время как левая рука их пассивно лежала на палке или удерживалась под ней, а не участвовала в звукоизвлечении, да и задачи звукоизвлечения перед испытуемым не стояла. Несмотря на это, полученные нами данные показали принципиальную важность проприоцептивного участия левой руки для улучшения управления смычком (как и любым другим орудием) правой руки для достижения правильной ориентации инструмента, зажатого в ней. Данные сведения важны как для профессионалов, так и для людей, не занимавшихся музыкой, и должны учитываться не только музыкантами-педагогами, но и педагогами, занимающимися развитием двигательной координации детей и подростков. Полученные нами результаты показывают, что не зрение, а бимануальная координация может рассматриваться, как средство достижения правильной ориентации смычка при игре на струнном инструменте. Это подтверждают видео-уроки высокопрофессиональных педагогов, которые, исходя из своей практики, интуитивно рекомендуют удерживать смычок левой рукой перпендикулярно виолончели и водить правой по смычку, с целью “запомнить” его исходное ортогональное положение относительно грифа [12].
С точки зрения механики, движение смычком в воздухе отличается от движения смычком по палке и по руке. При удержании смычка в воздухе во время его прохода от МИН к МАКС вся тяжесть смычка приходится на руку, в то время, как при движении по руке и по палке вес смычка распределяется между рукой и палкой. Действительно, при движении с опорой на руку или палку правая рука более разгружена, чем при движении смычка в воздухе и поэтому возможно более чувствительная к отклонениям от требуемой траектории. При этом изменения угла между рукой и смычком при движении смычка по палке и руке были больше, чем при движении смычка в воздухе. Дополнительное управление углом смычка относительно руки привело к более ортогональной траектории маркера на конце смычка при движении по палке и руке. Важно заметить, что механическое взаимодействие смычка и палки облегчало управление положением смычка в руке. Возможно, что при движении смычка в воздухе снижение амплитуды угла между смычком и рукой связано с отсутствием такого взаимодействия.
Можно предположить, что дополнительная афферентация, полученная при контакте смычка с левой рукой, облегчала пространственное восприятие положения смычка относительно палки, по которой он двигался. Так, ранее было показано, что афферентация от точечного контакта с внешним объектом увеличивает стабильность вертикальной позы [13], а у стоящего человека точечный контакт с внешним объектом помогает разделить отклонение от равновесия и общее движение тела [14]. Также известно, что деформация кожи в результате взаимодействия с предметами влияет на восприятие положения и смещения рук [15], афферентация от обеих рук улучшает восприятие положения конечной точки руки [16], а у пациента после инсульта увеличивалась точность достижения цели больной рукой, когда здоровая рука касалась больной руки [17]. Вероятно, что афферентация от контралатеральной руки помогает правильному восприятию положения смычка и палки, а вариации траектории на конце смычка определяются представлением о взаимном положении смычка и палки, по которой он двигается, и правильная ориентация смычка достигается изменениями во всех суставах правой руки [18]. У профессиональных музыкантов уменьшение вариации траектории смычка является следствием создания правильного представления об ориентации смычка в результате упорных тренировок [6]. При этом у музыкантов-профессионалов в движение смычка вносят вклад разные суставы руки, в то время как у новичков движение смычка обеспечивается в основном движением в плечевом суставе [7], что и подтвердило наше исследование, в котором участвовали люди, не имевшие опыта игры на струнных инструментах.
ЗАКЛЮЧЕНИЕ
Траектория движения маркера на конце смычка формируется с учетом афферентации от движения смычка по левой руке. Эта афферентная информация используется для создания представления о взаимном положении смычка и палки.
Этические нормы. Все исследования проведены в соответствии с принципами биомедицинской этики, сформулированными в Хельсинкской декларации 1964 г. и ее последующих обновлениях, и одобрены локальным биоэтическим комитетом Института проблем передачи информации им. А.А. Харкевича РАН (Москва).
Информированное согласие. Каждый участник исследования представил добровольное письменное информированное согласие, подписанное им после разъяснения ему потенциальных рисков и преимуществ, а также характера предстоящего исследования.
Конфликт интересов. Авторы декларируют отсутствие явных и потенциальных конфликтов интересов, связанных с публикацией данной статьи.
Список литературы
Бернштейн Н.А. О построении движений. М.: Медгиз, 1947. 255 с.
Schoonderwaldt E., Altenmuller E. Coordination in fast repetitive violin-bowing patterns // Plos One. 2014. V. 9. № 9. P. 106615.
Wurtz P., Mueri R.M., Wiesendanger M. Slight-reading of violinists: eye movements anticipate the musical flow // Exp. Brain Res. 2009. V. 194. № 3. P. 445.
Kazennikov O., Wiesendanger M. Bimanual coordination of bowing and fingering in violnists – effects of position changes and string changes // Motor Control. 2009. V. 13. № 3. P. 297.
Turner-Stokes L., Reid K. Three-dimensional motion analysis of upper limb movement in the bowing arm of string-playing musicians // Clin. Biomech. (Bristol, Avon). 1999. V. 14. № 6. P. 426.
Verrel J., Pologe S., Manselle W. et al. Coordination of degrees of freedom and stabilization of task variables in a complex motor skill: expertise-related differences in cello bowing // Exp. Brain Res. 2013. V. 224. № 3. P. 323.
Verrel J., Woollacott M., Lindenberger U. Articulated coordination of the right arm underlies control of bow parameters and quick bow reversals in skilled cello bowing // Front. Psychol. 2014. V. 5. P. 885.
Talis V.L., Kazennikov O.V., Solopova I.A., Ioffe M.E. Interhemispheric motor cortex influence during bimanual unloading // J. Integr. Neurosci. 2009. V. 8. № 4. P. 409.
Herter T.M., Kurtzer I.L., Granat L.M. et al. Inter-joint coupling of position sense reflects sensory contributions of bi articular muscles // J. Neurophysiol. 2021. V. 125. № 4. P. 1223.
Sainburg R.L., Poizner H., Ghez C. Loss of proprioception produces deficits in interjoint coordination // J. Neurophysiol. 1993. V. 70. № 5. P. 2136.
Sainburg R.L., Ghilardi M.F., Poizner H., Ghez C. Control of limb dynamics in normal subjects and patients without proprioception // J. Neurophysiol. 1995. V. 73. № 2. P. 820.
Mantel G. Cello technique: principles and form of movement. Bloomington. Indiana University Press, 1995. 232 p.
Jeka J.J., Lackner J.R. Fingertip contact influences human postural control // Exp. Brain Res. 1994. V. 100. № 3. P. 495.
Казенников О.В., Шлыков В.Ю., Левик Ю.С. Особенности поддержания вертикальной позы при дополнительном контакте с внешним объектом на движущейся и неподвижной платформе // Физиология человека. 2005. Т. 31. № 1. С. 59. Kazennikov O.V., Shlykov V.Yu., Levik Yu.S. Characteristics of the Maintenance of the Upright Posture in Subjects Touching an External Object while Standing on a Moving or Immobile Platform // Human Physiology. 2005. V. 31. № 1. P. 49.
Moscatelli A., Bianchi M., Ciotti S. et al. Touch as an auxiliary proprioceptive cue for movement control // Sci. Adv. 2019. V. 5. № 6. P. eaaw 3121.
Kuehn E., De Havas J., Silkoset E. et al. On the bimanual integration of proprioceptive information // Exp. Brain Res. 2015. V. 233. № 4. P. 1273.
Stevens J.A., Cole W.G., Vishton P.M. Using touch or imagined touch to compensate for loss of proprioception: a case study // Neurocase. 2012. V. 18. № 1. P. 66.
Гурфинкель В.С., Левик Ю.С. Система внутреннего представления и управление движениями // Вестник РАН. 1995. Т. 65. № 1. С. 29.
Дополнительные материалы отсутствуют.
Инструменты
Физиология человека