

Известия РАН. Серия физическая, 2022, T. 86, № 9, стр. 1273-1277
Исследование синхронного режима гистерезисного электромеханического преобразователя при конусной реализации преобразователя
С. Ю. Останин 1, *, А. Н. Соломин 1, Н. С. Зубарев 1, Цуй Шумэй 2, Чжу Чунбо 2
1 Федеральное государственное бюджетное образовательное учреждение высшего образования “Национальный исследовательский университет “МЭИ”
Москва, Россия
2 Харбинский политехнический университет
Харбин, Китай
* E-mail: OstaninSY@mpei.ru
Поступила в редакцию 18.04.2022
После доработки 13.05.2022
Принята к публикации 23.05.2022
- EDN: FYZFAC
- DOI: 10.31857/S0367676522090216
Аннотация
Исследованы механизмы физических процессов в магнитных цепях гистерезисных электромеханических преобразователей энергии конусной конструкции, включая магнитные цепи их роторов. Изучены вопросы формирования методологии для электромагнитного расчета синхронного режима такого типа преобразователя энергии. Сформулированы предложения по применению полученных результатов при проектировании.
ВВЕДЕНИЕ
Гистерезисные электромеханические преобразователи энергии [1–9] могут использоваться в асинхронном режиме при некотором скольжении ротора преобразователя относительно магнитного поля статора и в синхронном режиме. Это обусловлено единой физической природой электромагнитных процессов в гистерезисном электромеханическом преобразователе энергии в асинхронном и в синхронном режиме, в отличие от индукционных, магнитоэлектрических и реактивных электромеханических преобразователей энергии. Практическая важность работы определяется тем, что для реализации многих существующих и новых производственных и непроизводственных технологических процессов существует объективная необходимость обеспечения работы группы электромеханических преобразователей, например, электродвигателей, в режиме электрического синхронного вала [1–9].
Текущее и все предыдущие магнитные состояния ротора гистерезисного электромеханического преобразователя энергии, в том числе при его использовании в качестве гистерезисного электродвигателя в синхронном режиме, зависит от всех предшествующих его магнитных состояний. Первым из этих состояний является намагничивание ротора при пуске, когда напряжение электропитания подано на обмотку статора преобразователя, а ротор еще находится в неподвижном состоянии. Синхронный режим работы гистерезисного электромеханического преобразователя энергии определяется всеми режимами, которые ему предшествуют, начиная с пускового режима.
Цель исследования в статье заключалась в исследовании синхронного режима гистерезисного электродвигателя при его конусной реализации, то есть при выполнении статора и ротора с конусными поверхностями магнитопроводов, обращенными к рабочему воздушному зазору, и соответственно с конусной формой рабочего воздушного зазора. Это имеет большое значение для создания научной базы для разработок энергоэффективных электроприводов, в том числе многодвигательных электроприводов, с гистерезисными электродвигателями указанного класса.
МЕТОДОЛОГИЯ ЭЛЕКТРОМАГНИТНОГО РАСЧЕТА СИНХРОННОГО РЕЖИМА КОНУСНОГО ГИСТЕРЕЗИСНОГО ЭЛЕКТРОДВИГАТЕЛЯ
Для исследования было использовано математическое моделирование с проверкой качества моделирования дальнейшими экспериментальными исследованиями на натурных макетных образцах. При математическом моделировании и исследовании реализован сеточный метод [3, 10, 11], предложенный авторами на основе адаптивной сетки в осевом направлении.
При конусной реализации гистерезисного электродвигателя форма его ротора образуется поверхностями двух соосных конусов и с торцов – двух соосных параллельных колец. Ротор может быть постоянной или переменной толщины. Переменная толщина может увеличиваться в направлении от большего основания конусного ротора к меньшему основанию или от меньшего основания к большему. В любых электродвигателях при конусной реализации магнитное поле в осевом (продольном) направлении заметно искажается.
В гистерезисном электродвигателе это искажение существенно больше, чем в электродвигателе любого другого типа, что обусловлено принципиально присутствующим нелинейным эффектом магнитного гистерезиса и вызываемым им перемагничиванием магнитно-твердого материала гистерезисного ротора по частным симметричным и несимметричным циклам. В связи с этим прямое решение полевой задачи для гистерезисного электродвигателя конусной реализации крайне трудоемко и целесообразнее использовать сеточное моделирование электродвигателя конусного исполнения с помощью модели электродвигателя цилиндрической конструкции.
Предложенная методология электромагнитного расчета синхронного режима конусного гистерезисного электродвигателя содержит основные этапы:
1) Сеточное разбиение в математической модели гистерезисного электродвигателя конической конструкции на N эквивалентных гистерезисных электродвигателей малой длины, в которых искажением магнитного поля в осевом направлении можно пренебречь с сохранением требуемой точности.
2) Электромагнитные расчеты эквивалентных электродвигателей для дискретных возможных значений индукции магнитного поля в роторе, в результате чего определяются все электромагнитные параметры эквивалентных электродвигателей, основные из которых приведены в табл. 1 и в системе (1).
(1)
$\left. \begin{gathered} {{{\vec {I}}}_{{s1 син}}} = {{{\vec {I}}}_{{s1 син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,{{{\vec {F}}}_{{s1 син}}} = {{{\vec {F}}}_{{s1 син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \hfill \\ {{{\vec {E}}}_{{\delta 1 син}}} = {{{\vec {E}}}_{{\delta 1 син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,\,{{\varphi }_{{s\delta FE1\,{\text{син}}}}} = {{\varphi }_{{s\delta FE1\,{\text{син}}}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right); \hfill \\ {{{\vec {I}}}_{{s2 син}}} = {{{\vec {I}}}_{{s2 син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,{{{\vec {F}}}_{{s{\text{2}} син}}} = {{{\vec {F}}}_{{s{\text{2}} син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \hfill \\ {{{\vec {E}}}_{{\delta 2 син}}} = {{{\vec {E}}}_{{\delta 2 син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,\,{{\varphi }_{{s\delta FE2\,{\text{син}}}}} = {{\varphi }_{{s\delta FE2\,{\text{син}}}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right); \hfill \\ \centerdot \centerdot \centerdot \hfill \\ {{{\vec {I}}}_{{sk син}}} = {{{\vec {I}}}_{{sk син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,{{{\vec {F}}}_{{sk син}}} = {{{\vec {F}}}_{{sk син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \hfill \\ {{{\vec {E}}}_{{\delta k син}}} = {{{\vec {E}}}_{{\delta k син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,\,{{\varphi }_{{s\delta FEk\,{\text{син}}}}} = {{\varphi }_{{s\delta FEk\,{\text{син}}}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right); \hfill \\ \centerdot \centerdot \centerdot \hfill \\ {{{\vec {I}}}_{{sN син}}} = {{{\vec {I}}}_{{sN син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,{{{\vec {F}}}_{{sN син}}} = {{{\vec {F}}}_{{sN син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \hfill \\ {{{\vec {E}}}_{{\delta N син}}} = {{{\vec {E}}}_{{\delta N син}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right), \,\,\,{{\varphi }_{{s\delta FEN\,{\text{син}}}}} = {{\varphi }_{{s\delta FEN\,{\text{син}}}}}\left( {{{B}_{{r\,{\text{син}}}}}} \right). \hfill \\ \end{gathered} \right\}$Таблица 1.
Основные электромагнитные параметры эквивалентных электродвигателей
| № | Наименования параметров | Обозначения параметров | Единица измерения | Модель или режим работы |
|---|---|---|---|---|
| 1 | Количество эквивалентных гистерезисных электродвигателей малой длины в математической модели гистерезисного электродвигателя конической конструкции | N | – | Математическая модель |
| 2 | Порядковый номер эквивалентного гистерезисного электродвигателя малой длины в математической модели | k = 1, 2 , . . . , N | – | Математическая модель |
| 3 | Результирующий вектор тока в обмотке статора k-го эквивалентного составного гистерезисного электродвигателя энергии | ${{\vec {I}}_{{sk\,{\text{син}}}}}$ | А | Синхронный режим |
| 4 | Модуль вектора индукции магнитного поля в активной части ротора гистерезисного электродвигателя конической конструкции | ${{B}_{{r син}}}$ | Тл | Синхронный режим |
| 5 | Результирующий вектор магнитодвижущей силы (МДС) обмотки статора k-го эквивалентного составного гистерезисного электродвигателя | ${{\vec {F}}_{{sk син}}}$ | А | Синхронный режим |
| 6 | Результирующий вектор электродвижущей силы (ЭДС) намагничивающего контура обмотки статора k-го эквивалентного составного гистерезисного электродвигателя | ${{\vec {E}}_{{\delta k син}}}$ | В | Синхронный режим |
| 7 | Электрический угол между ЭДС намагничивающего контура обмотки статора k-го эквивалентного составного гистерезисного электродвигателя и вектором результирующей МДС (тока) в обмотке статора электродвигателя конической конструкции | ${{\varphi }_{{s\delta FEk\,{\text{син}}}}} $ | рад | Синхронный режим |
| 8 | Модуль вектора индукции магнитного поля в активной части ротора k-го эквивалентного составного гистерезисного электродвигателя | ${{B}_{{rk\,{\text{син}}}}}$ | В | Синхронный режим |
| 9 | Результирующий вектор тока в обмотке статора гистерезисного электродвигателя конической конструкции | ${{\vec {I}}_{{s\,{\text{син}}}}}$ | А | Синхронный режим |
Таким образом, строятся дискретные функциональные зависимости этих электромагнитных параметров от индукции магнитного поля в роторе. На рис. 1 и 2 приведены такие зависимости для двух из основных электромагнитных параметров эквивалентных гистерезисных электродвигателей, используемых в математической модели конусного гистерезисного электродвигателя: токов в обмотках статоров и электродвижущих сил (ЭДС) намагничивающих контуров электродвигателей.
Рис. 1.
Дискретные функциональные зависимости токов в обмотках статоров базовых составных гистерезисных электромеханических преобразователей энергии, условно обозначенных цифрами от 1 до 5, от уровня индукции магнитного поля в гистерезисных слоях роторов составных преобразователей в синхронном режиме.
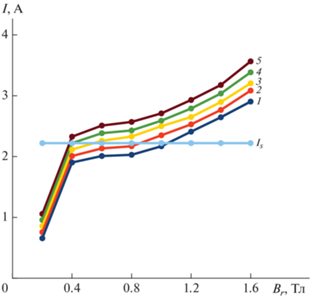
Рис. 2.
Дискретные функциональные зависимости ЭДС намагничивающих контуров базовых составных гистерезисных электромеханических преобразователей энергии, условно обозначенных цифрами от 1 до 5, от уровня индукции магнитного поля в гистерезисных слоях роторов составных преобразователей в синхронном режиме.

3) Преобразование зависимостей, полученных в п. 2, в зависимости (2) электромагнитных параметров (табл. 1) от тока в обмотке статора конусного гистерезисного электродвигателя ${{\vec {I}}_{{s\,\,син}}}$ для всего диапазона изменения тока.
(2)
$\left. \begin{gathered} {{B}_{{r1\,{\text{син}}}}} = {{B}_{{r1\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \,\,\,\,{{{\vec {F}}}_{{r1\,{\text{син}}}}} = {{{\vec {F}}}_{{r1\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \hfill \\ {{\varphi }_{{s\delta FE1\, син}}} = {{\varphi }_{{s\delta FE1\, син}}}\left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) ; \hfill \\ {{B}_{{r2\,{\text{син}}}}} = {{B}_{{r2\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \,\,\,\,{{{\vec {F}}}_{{r2\,{\text{син}}}}} = {{{\vec {F}}}_{{r2\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \hfill \\ {{\varphi }_{{s\delta FE2\, син}}} = {{\varphi }_{{s\delta FE2\, син}}}\left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) ; \hfill \\ \centerdot \centerdot \centerdot \hfill \\ {{B}_{{rk\,{\text{син}}}}} = {{B}_{{rk\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \,\,\,\,{{{\vec {F}}}_{{rk\,{\text{син}}}}} = {{{\vec {F}}}_{{rk\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \hfill \\ {{\varphi }_{{s\delta FEk син}}} = {{\varphi }_{{s\delta FEk\, син}}}\left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) ; \hfill \\ {{B}_{{rN\,{\text{син}}}}} = {{B}_{{rN\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \,\,{{{\vec {F}}}_{{rN\,{\text{син}}}}} = {{{\vec {F}}}_{{rN\,{\text{син}}}}} \left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) , \hfill \\ {{\varphi }_{{s\delta FEN\, син}}} = {{\varphi }_{{s\delta FEN\, син}}}\left( {{{{\vec {I}}}_{{s\,{\text{син}}}}}} \right) . \hfill \\ \end{gathered} \right\}$4) Аппроксимация дискретных зависимостей (2) электромагнитных параметров (табл. 1) от тока в обмотке статора конусного гистерезисного электродвигателя ${{\vec {I}}_{{s\,\,син}}}$ непрерывными функциями с помощью степенных рядов, реализующих наилучшее среднеквадратичное приближение методом наименьших квадратов [12], разработанных авторами и имеющих вид:
(3)
$P\left( {{{I}_{{s\,\,син}}}} \right) = {{a}_{0}} + {{a}_{1}}{{I}_{{s\,\,син}}} + {{a}_{2}}I_{{s\,\,син}}^{2}\,\, + {{a}_{3}}I_{{s\,\,син}}^{3}.$Здесь a0, a1, a2, a3 – коэффициенты многочлена, зависящие только от мультииндекса (0, 1, 2, 3); Is син – амплитуда вектора тока в обмотке статора гистерезисного электродвигателя конусной реализации.
Непрерывные функции вида (3) позволяют найти любые значения электромагнитных параметров эквивалентных гистерезисных электродвигателей, соответствующие току в обмотке статора гистерезисного электродвигателя ${{\vec {I}}_{{s\,\,син}}}$ при конусной реализации электродвигателя.
5) Итерационное численное решение нелинейного уравнения:
(4)
$\left| {{{U}_{{s\,{\text{з}}\,\,{\text{син}}}}} - {{U}_{{s\,\,{\text{син}}}}}\left( {{{I}_{{s\,\,син}}}} \right)} \right| \leqslant \Delta U.$Здесь ${{U}_{{s\,з\,\,син}}}$ – амплитуда вектора заданного напряжения электропитания конусного гистерезисного электродвигателя в синхронном режиме; ${{U}_{{s\,\,син}}}\left( {{{I}_{{s\,\,син}}}} \right)$ – текущее значение нелинейной функции, определяющей зависимость напряжения электропитания конусного гистерезисного электродвигателя от тока в обмотке его статора; ΔU – некоторая заранее заданная малая величина электрического напряжения, характеризующая точность решения указанного нелинейного уравнения численными методами, требуемую для электромагнитного расчета.
В случае если неравенство (4) не выполняется, то соответственно вычисляется новое значение ${{U}_{{s\,\,син}}}\left( {{{I}_{{s\,\,син}}}} \right)$ для нового значения тока.
В случае если модуль расхождения значений ${{U}_{{s\,\,син}}}\left( {{{I}_{{s\,\,син}}}} \right)$ и ${{U}_{{s\,з\,\,син}}}$ меньше, чем $\Delta U{\text{,}}$ ток в обмотке статора тока конусного гистерезисного электродвигателя с необходимой точностью соответствует напряжению электропитания, подаваемому на обмотку статора конусного гистерезисного электродвигателя в составе электропривода. Таким образом, вычисляется значение тока, и осуществляется переход к п. 6.
6) Расчет с помощью непрерывных функций вида (3) электромагнитных параметров и электромеханических показателей всех сформированных в математической модели эквивалентных гистерезисных электродвигателей.
7) Расчет по найденным в п. 6 параметрам и показателям эквивалентных электродвигателей электромагнитных параметров и электромеханических показателей конусного гистерезисного электродвигателя.
ЗАКЛЮЧЕНИЕ
В гистерезисном электродвигателе при конусной реализации искажение магнитного поля в осевом (продольном) направлении существенно больше, чем в электродвигателе любого другого типа, что обусловлено принципиально присутствующим нелинейным эффектом магнитного гистерезиса и вызываемым им перемагничиванием магнитно-твердого материала гистерезисного ротора по частным симметричным и несимметричным циклам.
Текущее и все предыдущие магнитные состояния ротора гистерезисного электромеханического преобразователя энергии, в том числе при его использовании в качестве гистерезисного электродвигателя в синхронном режиме, зависят от всех предшествующих магнитных состояний, начиная с первичного намагничивания ротора при пуске электродвигателя. Соответственно синхронный режим работы гистерезисного электродвигателя определяется всеми предыдущими режимами, начиная с пускового режима.
Прямое решение полевой задачи для гистерезисного электродвигателя конусной реализации крайне трудоемко и целесообразнее использовать сеточное математическое моделирование электродвигателя. Оптимальным является моделирование на основе адаптивной сетки в осевом направлении со сгущением сетки. Разработанная методология и алгоритм обеспечивает проектирование энергоэффективных электродвигателей конусной реализации.
Исследования, рассматриваемые в статье, выполнены при финансовой поддержке Российского фонда фундаментальных исследований (проекты № 20-08-01045-а, № 20-08-01106-а).
Список литературы
Делекторский Б.А., Тарасов В.Н. Управляемый гистерезисный привод. М.: Энергоатомиздат, 1983. 128 с.
Кавалерова Л.А., Миляев И.М., Михеев Н.И. // Приборы и сист. упр. 1976. № 6. С. 48.
Тарасов В.Н., Останин С.Ю. // Сб. докл. IX Межд. Выст.-конгресс. “Выс. Технол. Иннов. Инвест.” (Санкт-Петербург, 2004). С. 127.
Gao X., Sun B. // Proc. IEEE 8th Annual Int. Conf. CYBER (Harbin, 2018). P. 1563.
Kim H.S., Hong S., Han J.H. et al. // Proc. 21st Int. Conf. ICEMS (Harbin, 2018). P. 560.
Padilha J.B., Kuo-Peng P., Sadowski N. et al. // IEEE Trans. Magn. 2017. V. 53. No. 6. Art. No. 7402004.
Nasiri-Zarandi R., Mirsalim M., Tenconi // IEEE Trans. Ind. Electron. 2016. V. 63. No. 3. P. 1684.
Останин С.Ю., Миляев И.М., Рудник П.С. и др. // Сб. тр. XXVII Межд. конф. “Электромагн. поле и материалы (Фунд. физ. иссл.)” (Москва, 2019). С. 463.
Шнайдер А.Г., Пчелин И.К. Динамика мотор-подшипников. М.: Наука, 2007. 276 с.
Крон Г. Тензорный анализ сетей. М.: Советское радио, 1978. 720 с.
Никаноров В.Б., Останин С.Ю., Шмелева Г.А. // Электротехника. 2002. № 9. С. 5.
Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. М.: БИНОМ. Лаборатория знаний, 2008. 636 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Серия физическая