

Космические исследования, 2022, T. 60, № 5, стр. 384-395
Алгоритм безопасной посадки космического аппарата при спуске с окололунной орбиты
Б. И. Жуков 1, В. Н. Лихачев 1, Ю. Г. Сихарулидзе 1, *
1 Институт прикладной математики им. М.В. Келдыша
Москва, Россия
* E-mail: sikh@kiam1.rssi.ru
Поступила в редакцию 03.03.2022
После доработки 12.04.2022
Принята к публикации 04.05.2022
- EDN: NMHSVW
- DOI: 10.31857/S0023420622050089
Аннотация
Рассматривается задача безопасной посадки космического аппарата, имеющего комбинированную двигательную установку, с окололунной орбиты в заданное место на поверхности Луны. Безопасность посадки обеспечивается выполнением ограничений на параметры движения в момент прилунения, а также возможностью горизонтального перемещения аппарата относительно поверхности Луны для коррекции места посадки с учетом величины уклона, отсутствия крупных камней и глубоких ям. В алгоритме управления спуском используется решение модельной задачи “свободное падение-торможение”. Для коррекции места прилунения применяется алгоритм пропорционального наведения. Осуществляется адаптация к фактической величине кажущегося ускорения. Статистическими испытаниями показана работоспособность алгоритма, получена оценка точности приведения и расхода топлива с учетом всех ограничений на работу двигательной установки при выполнении условий безопасного прилунения.
ВВЕДЕНИЕ
Исследуется задача посадки КА с предпосадочной эллиптической окололунной орбиты 18 × 100 км в заданную точку на поверхности Луны. Рассматриваемый в качестве примера КА имеет характеристики, подобные [1]. Его двигательная установка является комбинированной. Она состоит из основного корректирующего и тормозного двигателя (КТД) с номинальной тягой Рктд = = 440 кгс, четырех двигателей мягкой посадки (ДМП) с тягой по Рдмп = 60 кгс каждый, а также двенадцати двигателей малой тяги (ДМТ), которые используются, в основном, для управления ориентацией КА. Тяга КТД регулируется в пределах $ \pm $40 кгс, а тяга ДМП “регулируется” от нулевого до максимального значения за счет изменения коэффициента заполнения импульса, т.е. длительности включения двигателя на шаге коррекции управления, равном 1 с. На работу КТД и ДМП наложены определенные ограничения. В том числе по минимальному и максимальному времени непрерывной работы, минимальной паузе между двумя включениями, максимальному числу включений и суммарному времени работы. Одновременно с КТД могут работать только два ДМП. Топливо для КТД и для ДМП + ДМТ находится в разных баках.
При посадке навигационная система КА использует бесплатформенный инерциальный блок (БИБ), доплеровский измеритель скорости и дальности (ДИСД), а также систему высокоточной и безопасной посадки (СВБП). БИБ на основе измерений линейных ускорений и компонент вектора угловой скорости формирует текущий вектор состояния с учетом заданных начальных условий. Вектор состояния включает три координаты и три составляющие вектора скорости, а также три угла и три составляющие вектора угловой скорости. ДИСД работает, когда КА принимает почти вертикальное положение (допустимое отклонение в пределах 20°) и высота КА над поверхностью не превышает 4500 м. Измеренные посредством ДИСД высота КА и его скорость относительно поверхности Луны используются для корректировки информации БИБ. СВБП сначала работает на окололунной орбите в режиме абсолютной навигации и передает в систему управления КА селенографические координаты, высоту полета над заданным радиусом поверхности Луны, три составляющие скорости перемещения относительно центра притяжения Луны, информацию об углах ориентации и компонентах вектора угловой скорости. На участке спуска СВБП выполняет сканирование поверхности Луны для выбора безопасного места прилунения. После первого сканирования с высоты менее 1300 м СВБП определяет уклон подстилающей поверхности, после второго сканирования с высоты менее 300 м СВБП “различает” камни/ямы высотой/глубиной 0.3 м.
Предпосадочная эллиптическая орбита формируется в селеноцентрической системе координат так, чтобы ее перицентр оказался на широте заданной точки прилунения. Требуемая долгота точки прилунения обеспечивается выбором упрежденной точки прицеливания на широте посадки. Упрежденная точка выбирается с учетом движения КА на предпосадочной орбите, номинального времени спуска и вращения Луны. На широте точки прилунения линейная скорость за счет вращения Луны составляет 1.3 м/с. Для КА на околополярной орбите эта скорость относительно Луны (с обратным знаком) является боковой. Требуемая точность прилунения (без учета выполнения горизонтальных маневров с посадкой на выбранную площадку) составляет 3 км.
Траектория посадки имеет два участка: основное торможение (ОТ), когда горизонтальная и вертикальная скорости КА гасятся до нуля, и прецизионное торможение (ПТ) при спуске на поверхность Луны. На участке ОТ, где расходуется основная масса топлива, применяется терминальное квазиоптимальное управление с адаптацией к фактическим условиям движения, целью которого является минимизация продольного промаха. Алгоритм управления на участке ОТ описан в [1–3]. На участке ПТ, где расход топлива почти на порядок меньше, главным требованием является обеспечение безопасного прилунения. Для управления движением КА от точки схода с предпосадочной эллиптической орбиты до точки прилунения, т.е. для участков ОТ и ПТ, разработан терминальный алгоритм управления посадкой (ТАУП), учитывающий специфику каждого участка.
Точка схода КА с предпосадочной эллиптической орбиты (начало участка ОТ) находится перед перицентром на таком угловом расстоянии, чтобы в момент обнуления горизонтальной и вертикальной скоростей (конец участка ОТ) КА оказался над упрежденной точкой прицеливания. После завершения участка ОТ выполняется вертикализация, т.е. в процессе свободного падения продольная ось КА совмещается с местной вертикалью.
Конечная прицельная высота участка ОТ зависит от результатов предварительного тестирования СВБП, которое проводится на окололунной орбите. В случае подтвержденной работоспособности СВБП прицельная высота конца участка ОТ равна 2000 м, и спуск планируется с двумя дополнительными маневрами (маневрами уклонения) для выведения КА на безопасную площадку посадки. Если СВБП не работоспособна, то прицельная высота конца участка ОТ равна 2650 м. В этом случае спуск планируется без маневров уклонения. В обоих случаях горизонтальная и вертикальная составляющие скорости в конце ОТ задаются нулевыми (допустимый разброс $ \pm $10 м/с).
В случае посадки без СВБП после вертикализации КА должен быть приведен на высоту порядка 40 м со скоростью снижения 2.3 м/с и нулевой горизонтальной скоростью относительно поверхности Луны, а затем спускаться с постоянной скоростью до контакта с ее поверхностью. Известно, что оптимальным по расходу топлива решением задачи приведения КА из некоторого начального состояния (высота h0, скорость V0) в заданное конечное (высота hТ, скорость VТ) является маневр “свободное падение-торможение” (СПТ).
При выполнении посадки с использованием СВБП такая задача решается 3 раза: для обеспечения условий первого и второго сканирования поверхности Луны посредством СВБП, а также для выведения КА на заключительный участок спуска с постоянной скоростью. Отсюда возникла целесообразность предварительного рассмотрения модельной задачи и анализа свойств ее решения для последующего использования в алгоритме управления движением КА на участке повторного торможения.
ПОСТАНОВКА ЗАДАЧИ
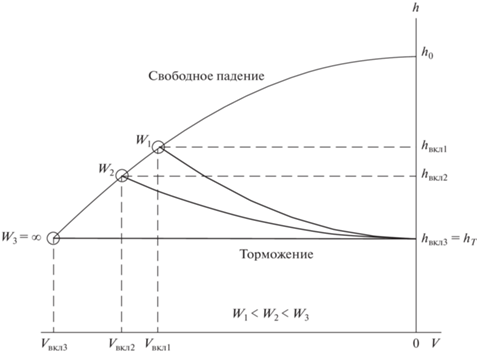
Рассмотрим модельную задачу о свободном вертикальном падении КА с начальной высоты h0 при начальной скорости снижения V0 и последующим торможением для выхода на заданную высоту hT с заданной скоростью снижения VT (маневр СПТ). Для обеспечения двух заданных конечных параметров движения, высоты и скорости снижения, имеются два параметра управления, высота включения тормозной двигательной установки hвкл (конец участка свободного падения) и время ее работы Т. Величина избыточного тормозного ускорения
задана. Здесь Р – тяга тормозной двигательной установки, m – масса КА (в модельной задаче постоянна), gЛ = 1.63 м/с2 – гравитационное ускорение на поверхности Луны. В модельной задаче принято W = const, т.е. движение КА является либо равноускоренным (на участке свободного падения Р = 0), либо равнозамедленным (на участке торможения Р > 0 и W > 0). Допущение W = const при расчете маневров СПТ справедливо с точностью порядка 0.5–1.0%.Для анализа этой задачи удобно использовать фазовую плоскость “скорость снижения V – высота h” (рис. 1), рассмотренную в [4]. На этом рисунке схематично показаны фазовые траектории h(V) участков свободного падения и торможения для фиксированных значений избыточного ускорения W при VT = V0 = 0. Высота включения hвкл зависит от W: чем больше величина избыточного ускорения W, тем меньше высота, т.е. при W1 < W2 < < W3 имеем hвкл1 > hвкл2 > hвкл3. В гипотетическом случае, когда W3 = ∞, следует hвкл = hТ. При этом время работы тормозной двигательной установки Т = 0 (импульсное торможение), а расход топлива минимален, т.е. схема спуска СПТ является оптимальной по расходу топлива.
Вычислим время включения тормозной двигательной установки tвкл, которое является определяющим для маневра СПТ. Движение КА на участке свободного падения 0 ≤ t ≤ tвкл описывается уравнениями
(2)
$\begin{gathered} ~\dot {V} = - {{g}_{{\text{Л}}}}, \\ V(t) = {{V}_{0}} - {{g}_{{\text{Л}}}}t, \\ h(t) = {{h}_{0}} + {{V}_{0}}t - {{g}_{{\text{Л}}}}{{t}^{2}}{\text{/}}2. \\ \end{gathered} $Здесь символом $\dot {V}$ обозначена производная скорости V по времени t. Время отсчитывается от начала участка свободного падения. В момент включения двигательной установки tвкл (т.е. в конце участка свободного падения) имеем:
(3)
$\begin{gathered} {{V}_{{{\text{вкл}}}}} = V\left( {{{t}_{{{\text{вкл}}}}}} \right) = {{V}_{0}} - {{g}_{{\text{Л}}}}{{t}_{{{\text{вкл}}}}}, \\ {{h}_{{{\text{вкл}}}}} = h\left( {{{t}_{{{\text{вкл}}}}}} \right) = {{h}_{0}} + {{V}_{0}}{{t}_{{{\text{вкл}}}}} - {{g}_{{\text{Л}}}}{\text{/}}2. \\ \end{gathered} $Исключая из системы (2) время, получим уравнение параболы свободного падения (0 ≤ h ≤ hвкл):
Движение КА на участке торможения описывается уравнениями
Здесь время t отсчитывается от начала участка торможения (0 ≤ t ≤ Т). По аналогии с (4) получим уравнение параболы торможения (hвкл ≤ h ≤ hТ):
С учетом заданных конечных условий имеем в конце торможения:
Здесь Та – длительность активного участка (т.е. участка торможения).
Из соотношения (5) для конечного момента участка торможения, когда h = hT и V = VT, с учетом соотношений (3) можно получить квадратное уравнение относительно времени включения tвкл, т.е. длительности участка свободного падения:
(6)
$\begin{gathered} {{g}_{{\text{Л}}}}({{g}_{{\text{Л}}}} + W)t~_{{{\text{вкл}}}}^{2} - {\text{ }}2{{V}_{0}}({{g}_{{\text{Л}}}} + W){{t}_{{{\text{вкл}}}}} - \\ - {\text{ }}(V_{T}^{2} - V_{0}^{2}) - 2W({{h}_{0}} - {{h}_{T}}) = 0. \\ \end{gathered} $Решение уравнения (6) определяет время свободного падения tвкл:
(7)
${{t}_{{{\text{вкл}}}}} = \frac{{V{}_{0}}}{{{{g}_{{\text{Л}}}}}} + \frac{1}{{{{g}_{{\text{Л}}}}}}\sqrt {\frac{1}{{W + {{g}_{{\text{Л}}}}}}\left\{ {V_{0}^{2}W + {{g}_{{\text{Л}}}}\left[ {V_{T}^{2} + 2W\left( {{{h}_{0}} - {{h}_{T}}} \right)} \right]} \right\}} ,$В частном случае при нулевой начальной и конечной скоростях VT = V0 = 0 имеем:
Формула (7) с учетом условия tвкл$ \geqslant $ 0 позволяет получить ограничение на величину избыточного ускорения (1) с учетом заданных краевых условий по высоте и скорости:
Анализ фазовой плоскости (рис. 1) и ограничения (8) приводит к следующим выводам. С уменьшением перепада высот h0 – hT потребное избыточное ускорение W увеличивается. В предельном случае при hТ $ \to $ h0 имеем W $ \to $ $\infty $. Для маневра СПТ избыточное ускорение должно удовлетворять условию W ≥ 0. Если W = 0, то выполняется условие VT = V0 независимо от перепада высот h0 – hT, и спуск КА происходит с постоянной скоростью снижения V = V0.
АЛГОРИТМ УПРАВЛЕНИЯ НА УЧАСТКЕ ПРЕЦИЗИОННОГО ТОРМОЖЕНИЯ
Проведенные предварительно статистические испытания алгоритма управления на участке ПТ при спуске с использованием СВБП позволили оценить средние параметры движения КА при выполнении маневров СПТ, в том числе его среднюю начальную массу m0, среднюю высоту h0 и среднюю скорость снижения V0 перед каждым маневром, а также среднюю конечную массу mТ, заданную (целевую) конечную высоту hТ и заданную скорость снижения VТ в конечной точке маневра:
маневр СПТ-1
маневр СПТ-2
маневр СПТ-3
Здесь цифры в индексе соответствуют номеру маневра.
Ограничение (8) для маневров СПТ-1, СПТ-2 и СПТ-3 принимает значения:
КТД с тягой 440 кгс создает избыточное ускорение WКТД$ \geqslant $ 3.124 м/с2. Поэтому с учетом ограничения (8) КТД можно использовать для выполнения любого маневра СПТ.
Четыре ДМП, два из которых работают в режиме полной тяги, а два других в режиме половинной тяги, обеспечивают суммарную тягу 180 кгс и создают избыточное ускорение W3ДМП$ \geqslant $ 0.315 м/с2. Согласно ограничению (8) их также можно использовать для выполнения всех маневров СПТ.
В табл. 1 даны предварительные оценки длительности включения и расхода топлива в модельной задаче при выполнении маневров СПТ с использованием КТД (тягой 440 кгс) или четырех ДМП (суммарная тяга 180 кгс).
Из приведенных данных следует, что из-за ограничения по минимальной длительности работы КТД (5 с) этот двигатель нельзя использовать для выполнения маневра СПТ-3. Четыре ДМП могут быть использованы для выполнения всех маневров СПТ, но время их работы при выполнении маневра СПТ-1 может достигать 30–40 с, что составляет 15–20% от суммарного допустимого времени работы каждого ДМП. Это довольно существенно с учетом их работы до момента исполнения СПТ-1.
На основе проведенного анализа принято следующее: маневр СПТ-1 выполняется посредством КТД с тягой 440 кгс и регулированием ее в пределах $ \pm $40 кгс, в необходимых случаях дополнительно включаются два ДПМ с “регулированием” средней тяги посредством включения-выключения. Маневры СПТ-2 и СПТ-3 выполняются с помощью четырех ДМП с суммарной тягой 180 кгс, причем два ДМП работают на полной тяге, а другие два ДМП – на 50% тяги, что обеспечивает возможность ее регулирования в пределах $ \pm $60 кгс.
Если посадка КА осуществляется без использования СВБП, то на участке ПТ выполняется только один маневр СПТ. Из предварительных статистических испытаний получены следующие средние параметры этого маневра:
Целевые параметры в точке окончания маневра: hТ = 40 м, VТ = –2.3 м/с.
Для такого маневра можно использовать только КТД с тягой 440 кгс. При этом время работы двигателя порядка 23 с, а расход топлива около 32 кг. Использование ДМП недопустимо, так как их время работы превысит 100 с.
В зависимости от работоспособности СВБП выбранная заранее площадка прилунения может не меняться в процессе спуска (посадка без использования СВБП) или корректироваться в некоторых пределах с использованием информации СВБП для уточнения степени безопасности ее поверхности (величины уклона и наличия крупных камней/ям). Безопасность прилунения КА обеспечивается также применением программного (“жесткого”) управления с фиксированными значениями прицельной высоты и скорости в конце маневров СПТ.
Для получения качественной информации СВБП в ходе сканирования необходимо обеспечить постоянную вертикальную ориентацию КА с точностью 3°, свободное падение (могут включаться только двигатели стабилизации) с начальной скоростью снижения не больше 12 м/с для первого сканирования и не больше 2 м/с для второго сканирования (горизонтальная скорость должна быть меньше 2 м/с.
В алгоритме управления движением КА на участке ПТ используется решение рассмотренной ранее модельной задачи. Как отмечалось, на этом участке выполняются три маневра типа СПТ. Первый и второй маневры (СПТ-1 и СПТ-2) создают условия для сканирования поверхности Луны посредством СВБП с целью уточнения места безопасной посадки КА. Третий маневр (СПТ-3) обеспечивает условия “мягкого” прилунения.
После СПТ-1 и СПТ-2 в необходимых случаях КА выполняет маневры для коррекции места безопасного прилунения (маневры уклонения). Алгоритм маневра уклонения описан ниже.
В результате маневра СПТ-1 КА выходит на высоту порядка 1300 м со скоростью снижения около –12 м/с и начинает свободное падение в течение 6 с, а СВБП сканирует поверхность Луны для выбора площадки размером 20 × 20 м с уклоном меньше 15°. Обработка результатов сканирования занимает 9 с.
Если по результатам сканирования найдется площадка, которая имеет уклон не более 15° с центром на расстоянии до 3-х метров от подспутниковой точки КА, то первый маневр уклонения не выполняется. При обнаружении подходящей площадки на расстоянии от 3-х до 100 м от подспутниковой точки выполняется первый маневр уклонения для совмещения подспутниковой точки с центром выбранной площадки. Если будет обнаружено несколько таких площадок, то в качестве цели выбирается ближайшая. В случае отсутствия площадки с уклоном меньше 15° выбирается площадка с минимальным уклоном. Максимальное время первого маневра уклонения равно 37 с (на максимальную дальность 100 м). Минимальное время маневра уклонения для условной нулевой дальности принято равным 15 с (при дальности до 3-х метров маневр уклонения не выполняется). Для промежуточных дальностей от 3-х до 100 м время маневра определяется как квадратичная функция от дальности (с вершиной параболы на дальности 100 м).
Маневр СПТ-2 необходим для обеспечения условий второго сканирования поверхности Луны посредством СВБП с высоты меньше 300 м, когда можно различить камни/ямы высотой/глубиной до 0.3 м. Время сканирования 6 с, время обработки кадра 15 c. По результатам второго сканирования выбирается площадка размером 20 × × 20 м, центр которой находится на расстоянии до 20 м от текущей подспутниковой точки. Логика выбора площадки прилунения и второй маневр уклонения аналогичны первому. Заданная точность приведения КА к центру выбранной площадки при первом и втором маневрах уклонения составляет 3 м. Эта величина ограничивает минимальные дальности при выполнении обоих маневров (зона нечувствительности).
Перед заключительным этапом спуска выполняется маневр СПТ-3. КА выводится на высоту порядка 30 м со скоростью снижения –2.3 м/с. С этой высоты поддерживается постоянная скорость снижения КА и обеспечивается “мягкое” прилунение.
Номинальная фазовая траектория положена в основу программы спуска. “Жесткость” траектории обеспечивается фиксацией высот hТ и скоростей снижения VТ в конечных точках маневров СПТ-1, СПТ-2 и СПТ-3:
(9)
$\begin{gathered} {{h}_{Т}}_{1} = 1350{\text{ м}},\,\,\,\,{{V}_{Т}}_{1} = - 12{\text{ м/с}}; \hfill \\ {{h}_{Т}}_{2} = 310{\text{ м}},\,\,\,\,{{V}_{Т}}_{2} = - 2{\text{ м/с}}; \hfill \\ {{h}_{Т}}_{3} = 35{\text{ м}},\,\,\,\,{{V}_{Т}}_{3} = - 2.3{\text{ м/с}}. \hfill \\ \end{gathered} $По существу (9) задают терминальные условия для выхода на высоты сканирования посредством СВБП и для выполнения безопасного прилунения.
Вычисленное по формуле (7) время включения тормозной двигательной установки tвкл (время t отсчитывается от начала участка свободного падения) используется алгоритмом управления для формирования команды на включение двигателей торможения. Для СПТ-1 это КТД, для СПТ-2, 3 это ДМП. При этом для СПТ-1 учитывается запаздывание выхода тяги КТД на номинальную величину 440 кгс (2.4 с). Программная скорость спуска по параболе торможения формируется в зависимости от текущей навигационной высоты по конечным параметрам движения hТ и VТ:
(10)
${{V}_{{{\text{прог}}}}}{\text{(}}h{\text{) = }} - \sqrt {V_{T}^{2} + 2\left( {h - h{{\,}_{T}}} \right){{W}_{1}}} .$При маневрах СПТ-1 и СПТ-2 точность отслеживания программной скорости (10) в процессе торможения составляет ±1 м/с. Регулируется скорость снижения путем изменения тяги тормозного двигателя. Программы спуска для маневров СПТ-2 и СПТ-3 формируются аналогично СПТ-1. На последнем участке спуска с постоянной скоростью (–2.3 м/с) требуемая точность выдерживания заданной скорости составляет ±0.3 м/с.
АЛГОРИТМ АДАПТАЦИИ
Средняя тяга КТД равна 440 кгс при допуске ±20 кгс, а допуск на массу составляет ±20 кг. Из статистических испытаний получена средняя масса КА в конце участка ОТ: ~910 кг. Отсюда можно оценить пределы возможного изменения избыточного ускорения W (разность между кажущимся ускорением и гравитационным ускорением Луны) в конце участка ОТ. Максимальное избыточное ускорение имеет место при максимальной тяге и минимальной массе, а минимальное – при минимальной тяге и максимальной массе. От среднего избыточного ускорения различие может достигать ±10%. Поэтому величину W в формуле (7) для расчета маневров СПТ необходимо уточнять.
Алгоритм адаптации использует измерения кажущегося ускорения КА в конце ОТ. Величина суммарной тяги двигательной установки PΣ0 и масса КА m0 в конце ОТ точно не известны, но их отношение, т.е. фактическое кажущееся ускорение в конце ОТ
по измерениям БИБ известно достаточно точно. На участке ОТ для торможения используются КТД и ДМП. В конце ОТ известен угол отклонения привода регулятора тяги КТД и соответствующая ему величина тяги (по тарировочной дроссельной характеристике двигателя). Поэтому можно оценить изменение тяги КТД (ΔРКТД) при переводе регулятора тяги в положение, соответствующее средней величине тяги (440 кгс). Для работающих дополнительно ДМП на участке ОТ в конце этого участка известен режим их работы (коэффициент заполнения импульса), что позволяет оценить их среднюю тягу (РДМП) по номинальной характеристике.Маневр СПТ-1 выполняется посредством КТД со средней номинальной тягой 440 кгс. При этом масса КА по сравнению с концом ОТ уменьшается на величину расхода топлива при работе двигателей стабилизации Δmтоп, т.е. начальная масса КА при выполнении маневра СПТ-1 будет m1=m0 – Δmтоп. Тяга двигательной установки уменьшится на ΔР = ΔРКТД + ΔРДМП, т.е. тяга будет Р1 = РΣ0 – ΔР. Здесь ΔРДМП учитывает изменение коэффициента заполнения импульса (обнуление) для ДМП при переходе от ОТ к ПТ.
Для расчета адаптированного избыточного ускорения при выполнении маневра СПТ-1 используется формула
Здесь ΔР – номинальное уменьшение суммарной тяги двигательной установки, РΣ0 – номинальная суммарная тяга в конце ОТ, Δmтоп – расход топлива на стабилизацию КА от конца ОТ до начала маневра СПТ-1 (по номинальному секундному расходу топлива), m0 – масса КА в конце ОТ (по статистике).
При выполнении маневров СПТ-2 и СПТ-3 посредством ДМП с суммарной тягой 180 кгс расчет избыточного кажущегося ускорения W в формуле, аналогичной (1), выполняется по номинальной средней тяге ДМП с учетом значения коэффициента заполнения импульса. Расход топлива в промежутке между маневрами, на маневры уклонения и в процессе торможения вычисляется по номинальному секундному расходу двигателей с учетом времени их работы.
Адаптация к фактическому избыточному ускорению повышает точность выполнения маневров СПТ и способствует безопасному прилунению.
АЛГОРИТМ УПРАВЛЕНИЯ ПРИ МАНЕВРАХ УКЛОНЕНИЯ
На участке ПТ управление движением КА осуществляется по двум каналам: вертикальному и горизонтальному. Вертикальный канал реализует маневры СПТ посредством включения двигателей торможения (КТД или ДМП) с отслеживанием программной скорости (10) на участках торможения путем изменения тяги. На маневрах уклонения также выполняется управление вертикальной скоростью с целью обеспечения “невзлета” КА (т.е. сохранения отрицательной вертикальной скорости) в момент окончания маневра. Горизонтальный канал реализует маневры уклонения за счет отклонения вектора тяги двигателя на некоторый угол от вертикали. Маневр уклонения выполняется одновременно в продольном (канал тангажа) и боковом (канал рыскания) направлениях. При отклонении от вертикали на угол φ появляется горизонтальная составляющая тяги в направлении маневра (Рsinφ), которая ограничена максимальным допустимым углом φ = 20° из условий функционирования ДИСД. В случае отклонения КА на максимальный угол избыточное тормозное ускорение (1), которое действует в вертикальном канале, уменьшается (на ~37% при использовании ДМП с суммарной тягой 180 кгс).
Маневры уклонения рассматриваются в посадочной инерциальной системе координат (ПСК) с началом 0 в центре масс Луны. Оси 0хПСК и 0уПСК лежат в плоскости предпосадочной эллиптической орбиты, причем ось 0хПСК направлена против движения КА, а ось 0уПСК – по радиус-вектору упрежденной точки прицеливания. Ось 0zПСК дополняет систему координат до правой. Связанная система координат (ССК) с началом С в центре масс КА после участков ОТ и вертикализации ориентирована следующим образом: ось Сх сонаправлена с осью 0уПСК, ось Су сонаправлена с осью 0хПСК, а ось Сz направлена против оси 0zПСК.
Для выполнения маневра уклонения используется алгоритм пропорционального наведения, суть которого заключается в следующем. Пусть Х0 и Z0 – начальные координаты КА в ПСК, а Vx0 и Vz0 – компоненты начальной горизонтальной скорости. Прицельная точка Ц (цель) в горизонтальной плоскости для маневра уклонения имеет координаты:
Здесь ∆Х, ∆Z – продольная и боковая составляющие координат центра выбранной площадки относительно начального положения КА, VzЛ = –1.3 м/с – скорость на широте посадки вследствие вращения Луны (предпосадочная орбита близка к полярной), tм – прогнозируемое время маневра. Для текущих координат КА (Х, Z) и прицельных координат (Хц, Zц) определяются программные скорости (Vxпр, Vzпр), пропорциональные их разности:
(11)
$\begin{gathered} {{V}_{x}}_{{{\text{пр}}}} = {{k}_{1}}\left[ {X - ({{X}_{0}} + \Delta X)} \right], \\ {{V}_{z}}_{{{\text{пр}}}} = {{k}_{1}}\left[ {Z - ({{Z}_{0}} + \Delta Z + {{V}_{{z{\text{Л}}}}}\Delta t)} \right]. \\ \end{gathered} $Здесь коэффициент k1 = –0.1 с–1, $\Delta t$ – время от начала маневра уклонения.
Программные скорости (11) позволяют вычислить командные углы крена θк и рыскания ψк для выполнения маневров в продольном и боковом направлениях:
(12)
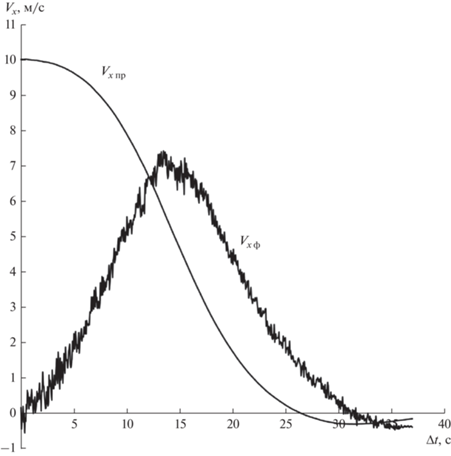
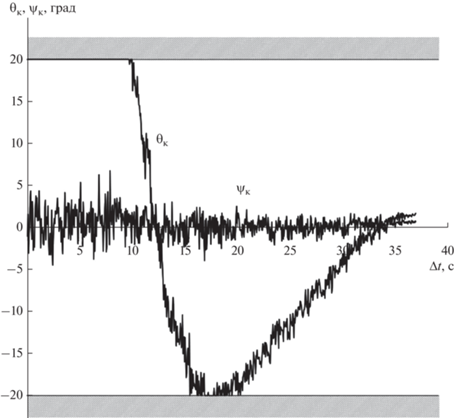
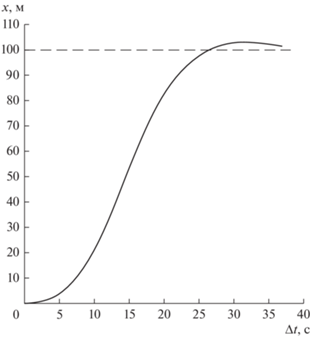
$\begin{gathered} {{\theta }_{{\text{к}}}} = {{k}_{2}}({{V}_{x}} - {{V}_{x}}_{{{\text{пр}}}}), \\ {{\psi }_{{\text{к}}}} = {{k}_{2}}({{V}_{z}} - {{V}_{z}}_{{{\text{пр}}}}), \\ \end{gathered} $Командные углы (12) реализуются системой управления КА в процессе выполнения первого и второго маневров уклонения. В качестве примера на рис. 2 показано изменение программной и фактической скоростей при выполнении первого маневра уклонения на 100 м в продольном направлении. Небольшое перерегулирование в конце может быть устранено посредством изменения в конце маневра коэффициента усиления в формуле (12) для θк. Рис. 3 иллюстрирует изменение командных углов тангажа и рыскания, а рис. 4 – изменение продольной координаты в процессе этого маневра.
После первого и второго маневров уклонения с целью уменьшения промаха, который всегда имеет место после выполнения маневров, на активных участках СПТ-2 и СПТ-3 осуществляется дополнительное “подтягивание” к точке прицеливания (к центру выбранной для прилунения площадки). “Подтягивание” основано на тех же соотношениях (11) и (12), что и сами маневры уклонения.
СТАТИСТИЧЕСКИЕ ИСПЫТАНИЯ АЛГОРИТМА
Проверка эффективности терминального алгоритма управления посадкой (ТАУП) проводилась на комплексной модели возмущений, включающей следующие составляющие:
1) отклонение массы КА, моментов инерции и положения центра масс от номинальных величин,
2) отклонение тяг и удельных тяг двигателей от номинальных величин, а также эксцентриситет и перекос тяги,
3) ошибки начального вектора состояния,
4) ошибки навигационных измерений.
Принято, что ошибки массы и координаты центра масс, а также тяги и удельной тяги имеют равномерное распределение в заданных пределах, а остальные ошибки имеют нормальное распределение с нулевым математическим ожиданием и заданным среднеквадратичным отклонением.
Величины обоих маневров уклонения формируются случайным образом по двум координатам при их равномерном распределении с учетом ограничений по дальности.
Рассматриваемые варианты совокупных действующих возмущений и маневров, формируются с помощью датчика псевдослучайных чисел однозначно по номеру варианта. Размерность псевдослучайного вектора равна числу возмущающих факторов, отдельные компоненты которого имеют соответствующее распределение. В каждом случае выполняются (или не выполняются) свои маневры уклонения. Это позволяет при необходимости детально анализировать “плохие” варианты и соответственно корректировать алгоритм управления для их устранения. Итоговая статистика получена расчетом 500 возмущенных траекторий отдельно для посадки с использованием СВБП (табл. 2) и без СВБП (табл. 3). В этих таблицах приняты следующие обозначения для конечных параметров движения в момент прилунения: tк – время от начала спуска до прилунения, mк – конечная масса КА, mтоп – расход топлива от начала спуска до прилунения (отдельно для КТД, ДМП+ДМТ и суммарный расход), Vr – вертикальная скорость, Vгор – горизонтальная скорость, $\varphi $ – угол продольной оси КА с вертикалью, x, z – промахи в продольном и боковом направлениях относительно выбранной точки прилунения, $r = \sqrt {{{x}^{2}} + {{z}^{2}}} $, время работы КТД, а также времена работы включаемых попарно ДМП 1, 2 и ДМП 3, 4. МО означает математическое ожидание, $\sigma $ – среднее квадратичное отклонение, min – минимальная величина, вар. min показывает номер варианта возмущенной траектории, на которой достигается минимальная величина, max – максимальная величина, вар. max показывает номер варианта возмущенной траектории, на которой достигается максимальная величина,
Таблица 2.
Результаты статистических испытаний 500 возмущенных траекторий спуска с использованием СВБП
| Параметры | tк, с | mк, кг | mтоп, кг | Vr, м/с | Vгор, м/с | $\varphi $, град | Промах, м | Время работы, с | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| КТД | ДМП + + ДМТ | $\Sigma $ | x | z | r | КТД | ДМП1,2 | ДМП3,4 | ||||||
| МО | 612.7 | 796.2 | 593.8 | 250.13 | 843.9 | –2.3 | 0.03 | 0.49 | –0.1 | –0.1 | 0.6 | 432.9 | 213.6 | 212.4 |
| СКО | 13.0 | 8.2 | 9.5 | 10.65 | 7.3 | 0.2 | 0.02 | 0.25 | 0.5 | 0.5 | 0.33 | 8.1 | 13.4 | 13.2 |
| min | 564.4 | 775.5 | 570.5 | 217.36 | 812.4 | –2.7 | 0.00 | 0.01 | –1.7 | –1.3 | 0.03 | 420.8 | 179.9 | 179.7 |
| Вар. min | 248 | 252 | 464 | 289 | 423 | 58 | 69 | 237 | 174 | 315 | 275 | 156 | 389 | 289 |
| max | 647.2 | 830.8 | 612.9 | 277.35 | 860.2 | –1.9 | 0.11 | 1.27 | 1.4 | 1.6 | 1.8 | 454.6 | 246.6 | 245.5 |
| Вар. max | 268 | 248 | 134 | 464 | 213 | 76 | 418 | 218 | 250 | 451 | 174 | 261 | 261 | 261 |
Таблица 3.
Результаты статистических испытаний 500 возмущенных траекторий спуска без СВБП
| Параметры | tк, с | mк, кг | mтоп, кг | Vr, м/с | Vгор, м/с | $\varphi $, град | Промах, м | Время работы, с | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| КТД | ДМП + + ДМТ | $\Sigma $ | x | z | r | КТД | ДМП1,2 | ДМП3,4 | ||||||
| МО | 509.7 | 864.0 | 611.8 | 164.3 | 776.1 | –2.3 | 0.06 | 0.39 | 121 | –181 | 565 | 446.7 | 132.2 | 131.0 |
| СКО | 12.0 | 6.3 | 10.0 | 8.8 | 5.4 | 0.2 | 0.03 | 0.18 | 255 | 597 | 385 | 8.1 | 12.3 | 12.2 |
| min | 473.0 | 844.6 | 584.4 | 148.3 | 758.7 | –2.7 | 0.01 | 0.01 | –352 | –1993 | 25 | 426.3 | 107.0 | 106.3 |
| Вар. min | 284 | 283 | 198 | 268 | 315 | 25 | 15 | 242 | 342 | 477 | 301 | 284 | 268 | 268 |
| max | 543.9 | 882.6 | 631.9 | 186.8 | 790.1 | –1.8 | 0.19 | 0.99 | 2181 | 1855 | 2183 | 469.3 | 166.0 | 163.0 |
| Вар. max | 348 | 284 | 83 | 198 | 267 | 292 | 96 | 446 | 294 | 92 | 294 | 294 | 294 | 294 |
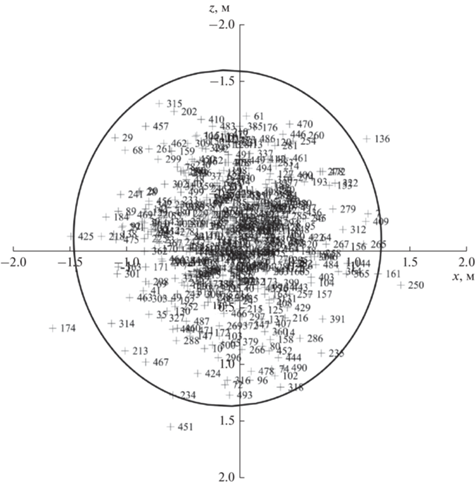
Статистические испытания ТАУП на участке прецизионного торможения показали его работоспособность при посадке с СВБП и без СВБП. При использовании СВБП посадка осуществляется в выбираемом районе Луны, а промах относительно центра уточненной площадки прилунения не превышает 2 м, величина скорости прилунения меньше 2.8 м/с, горизонтальная скорость не превышает 0.1 м/с, угол с вертикалью меньше 1.5°. Расход топлива из баков КТД и баков ДМП + ДМТ находится в допустимых пределах. На рис. 5 показаны координаты точек прилунения при посадке с СВБП. Начало посадочной системы координат совпадает со скорректированной точкой посадки (центром выбранной площадки).
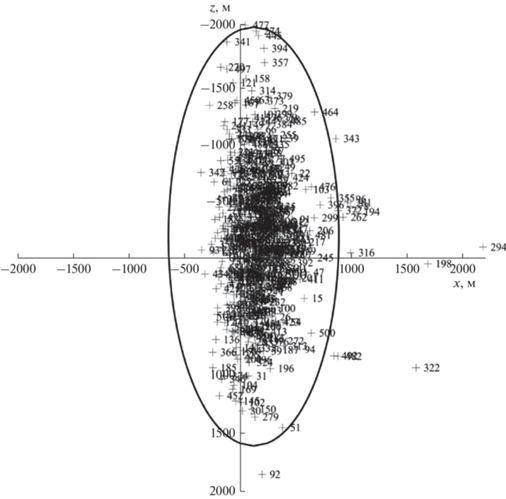
При посадке без СВБП промах относительно выбранной точки прилунения не превышает 2200 м, величина скорости прилунения порядка 2.3 м/с, горизонтальная скорость не превышает 0.2 м/с, угол с вертикалью меньше 1°. Все ограничения по запасу топлива и по допустимому времени работы двигателей выполняются. На рис. 6 даны координаты точек прилунения при посадке без СВБП. Начало посадочной системы координат совпадает с заданной априори точкой посадки.
ЗАКЛЮЧЕНИЕ
Разработана вторая часть комплексного терминального алгоритма управления посадкой – ТАУП для участка прецизионного торможения. Первая часть алгоритма для участка основного торможения изложена в ранних публикациях авторов. КА имеет комбинированную двигательную установку, включающую основной двигатель с регулируемой тягой в пределах $ \pm $10%, четыре дополнительных двигателя мягкой посадки, средняя тяга которых “регулируется” посредством включения-выключения (изменением коэффициента заполнения импульса на интервале 1 c), и двигателей стабилизации с малой тягой. Безопасность посадки обеспечивается возможностью коррекции места прилунения для избегания участков с большим уклоном и наличием больших камней/глубоких ям, а также применением “жесткой” траектории спуска. ТАУП обеспечивает приемлемую точность прилунения, расход топлива в пределах располагаемого запаса и выполнение заданных ограничений на режимы работы двигателей. ТАУП тестирован статистическими испытаниями на возмущенных траекториях с использованием комплексной модели полного движения КА (центра масс и относительно центра масс), с учетом работы автономной навигационной системы и совокупной модели действующих возмущений.
Список литературы
Жуков Б.И., Лихачев В.Н., Сихарулидзе Ю.Г. и др. Управление на этапе основного торможения при посадке на Луну космического аппарата с комбинированной двигательной установкой // Известия РАН. Теория и системы управления. 2016. № 1. С. 115–125.
Жуков Б.И., Зайко Ю.К., Лихачев В.Н. и др. Адаптивный терминальный алгоритм наведения для посадки на Луну // Вестник НПО им. С.А.Лавочкина. 2012. № 4. С. 92–102.
Жуков Б.И., Зайко Ю.К., Лихачев В.Н. и др. Робастный алгоритм наведения для посадки на Луну// Космич. исслед. 2013. Т. 51. № 6. С. 511–524. (Cosmic Research. P. 465–477).
Лихачев В.Н., Сихарулидзе Ю.Г., Федотов В.П. Заключительные этапы торможения и методика расчета параметров управления движением КА, совершающего мягкую посадку на Луну // Вестник НПО им. С.А. Лавочкина. 2013. № 1. С. 3–10.
Дополнительные материалы отсутствуют.
Инструменты
Космические исследования