

Известия РАН. Механика твердого тела, 2022, № 6, стр. 54-62
ОБ ОДНОЙ ВОЗМОЖНОСТИ ОРИЕНТАЦИИ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО АППАРАТА ПО МАГНИТНОМУ ПОЛЮ ЗЕМЛИ
a Акционерное общество “Военно-промышленная корпорация
“Научно-производственное объединение машиностроения”
г. Реутов, Московская область, Россия
* E-mail: iabezyaev@yandex.ru
Поступила в редакцию 02.11.2021
После доработки 20.01.2022
Принята к публикации 26.01.2022
- EDN: EKTNPG
- DOI: 10.31857/S0572329922050026
Аннотация
Рассматривается активная система ориентации (СО) орбитального околоземного космического аппарата (КА), содержащая бортовой вычислитель, блок гироскопических датчиков угловых скоростей (БИУС) и исполнительные органы (маховики, гиродины, реактивные двигатели). В качестве датчика внешней информации предложено применить магнитометры (МГМ), установленные по связанным осям КА. Такую систему назовем магнитно-гироскопической системой ориентации (МГСО). Показано, что применение МГМ в качестве датчика ориентации не нарушает функциональных возможностей ориентации современных КА и позволяет выполнять такие полетные режимы как восстановление ориентации (ВО) и программное ориентирование КА относительно орбитальной системы координат (ОСК). Изложен принцип построения МГСО, приведены рабочие алгоритмы, дана оценка точности ориентации, приведены результаты моделирования.
Введение. Вопросам ориентации околоземных КА с использованием магнитного поля Земли (МПЗ) посвящено значительное количество публикаций как отечественных, так и зарубежных специалистов [1–17]. В большинстве случаев исследования направлены на решение задач управления небольшими нано- и микроспутниками с помощью электромагнитных или магнитных исполнительных органов. Этот класс задач подробно исследован, в ряде случаев имеет прикладное значение. Однако интересно решение другой задачи – использование свойств МПЗ для создания активной МГСО, применимой для любых типов КА.
Разработка МГСО привлекательна тем, что применение МГМ в качестве датчика внешней информации существенно экономит компоновочное пространство КА, снижает массу и энергопотребление в десятки раз, на порядок уменьшает затраты на закупку совместимых датчиков (датчики звезд, горизонта и др.). Интересна возможность применения МГМ из состава системы сброса кинетического момента, что еще больше упрощает и удешевляет разработку МГСО. Вместе с тем, МГСО из-за недостаточной точности рассматривается как функциональный резерв основной прецизионной системы ориентации, которая либо полностью ее замещает, либо резервирует работу основного датчика ориентации.
Для функционирования МГСО, кроме МГМ, БВ, БИУС и исполнительных органов, требуется навигационно-баллистическое обеспечение и связь с наземным пунктом управления полетом КА.
1. Восстановление ориентации КА относительно ОСК. Определим системы координат. Начало ОСК находится в центре масс КА, ось ${{Y}_{0}}$ совпадает с направлением радиус-вектора, проходящего из центра масс Земли к центру масс КА, ось X0 лежит в плоскости орбиты и направлена в сторону движения КА, ось ${{Z}_{0}}$ дополняет систему до правой. Связанная система координат (ССК) $XYZ$ совпадает с главными центральными осями инерции КА, в номинальном положении совпадает с осями ОСК. Начало инерциальной системы координат (ИСК) ${{X}_{{ro}}}{{Y}_{{ro}}}{{Z}_{{ro}}}$ совпадает с центром масс Земли, ось ${{X}_{{ro}}}$ направлена в точку весеннего равноденствия, ось ${{Z}_{{ro}}}$ совпадает с осью вращения Земли и направлена в сторону ее севера, ось ${{Y}_{{ro}}}$ дополняет систему до правой.
В начальный момент времени принимаем, что КА, после начального демпфирования, неподвижен относительно звезд и находится в некотором произвольном положении относительно ОСК. В текущий момент времени МГМ, расположенные по связанным осям, измеряют проекции вектора $A$ магнитной индукции МПЗ на собственные оси. Для тех же моментов времени мы можем, используя математическую модель аналитического геомагнитного поля Земли [18, 19] и данные баллистики, рассчитать вектор B магнитной индукции МПЗ в проекциях на оси ОСК – ${{B}_{o}}$. Таким образом, мы имеем один и тот же вектор в разных системах координат, причем $\left| A \right| = \left| {{{B}_{o}}} \right|$.
Задача заключается в требовании построить алгоритм перевода КА из произвольного начального положения ${{\psi }_{0}},{{\vartheta }_{0}},{{\gamma }_{0}}$ (курс, тангаж, крен) относительно ОСК в ориентированное положение $\psi = \vartheta = \gamma = 0$ за конечное время tk и сохранить ориентированное положение на интервале времени ${{t}_{k}} \leqslant t < {{t}_{n}},$ $n > k$.
Алгоритм восстановления ориентации КА относительно ОСК основан на свойстве обратимого отображения – изоморфизме линейного преобразования координат вектора при ортогональном повороте 3-мерного базиса $A = M{{B}_{o}}$.
В соответствии с этим свойством [20] в результате поворота вектора в исходной системе координат его преобразованные координаты будут находиться так же в исходной системе координат и будут в точности соответствовать его же координатам в повернутой относительно исходной системы координат.
Выполним нормирование векторов A и ${{B}_{o}}$
(1.1)
$\theta = \frac{{\tilde {q}}}{{\left| {\tilde {q}} \right|}} = \frac{{\left| \alpha \right|\left| {{{b}_{o}}} \right| + (\alpha {\text{,}}{{b}_{o}}) + \left[ {\alpha {\text{,}}{{b}_{o}}} \right]}}{{\left| {\left| \alpha \right|\left| {{{b}_{o}}} \right| + (\alpha {\text{,}}{{b}_{o}}) + \left[ {\alpha {\text{,}}{{b}_{o}}} \right]} \right|}} = {{\theta }_{o}} + i{{\theta }_{{xo}}} + j{{\theta }_{{yo}}} + k{{\theta }_{{zo}}}$Найдем угловые скорости КА (ССК) относительно ОСК
где ${{\omega }_{r}}({{\omega }_{{xr}}},{{\omega }_{{yr}}},{{\omega }_{{zr}}})$ – искомые проекции вектора угловой скорости КА на собственные оси; $\omega {\text{ }}({{\omega }_{x}},{{\omega }_{y}},{{\omega }_{z}})$ – кососимметричная матрица, составленная из показаний БИУС; ${{\omega }_{o}}({{\omega }_{{xo}}},{{\omega }_{{yo}}},{{\omega }_{{zo}}})$ – кососимметричная матрица орбитальной угловой скорости ОСК относительно ИСК, полученная из баллистических данных; С – матрица, составленная из элементов кватерниона (1.1).Стабилизацию КА будем выполнять относительно вектора $(i{{\theta }_{{xo}}},j{{\theta }_{{yo}}},k{{\theta }_{{zo}}})$, для чего вычислим соответствующие скорости:
Работа алгоритма заключается в создании управляющих моментов и поворота КА до совмещения векторов A и ${{B}_{o}}$, при котором для $t \to \infty $ выполняются условия θ = 1, $\dot {\theta } = 0,$ $\psi = \dot {\psi } = 0,$ $\vartheta = \dot {\vartheta } = 0,$ $\gamma = \dot {\gamma } = 0$. При этом моменты управления являются функциями фазовых координат $\theta {\text{,}}\dot {\theta }$ (1.1) и (1.3) и могут быть реализованы наиболее оптимальным для конкретного КА образом:
Для определенности, назовем полученный алгоритм (1.1)–(1.4) – алгоритмом ROM (пространство, ориентация, магнетизм).
На рис. 1,a показано восстановление орбитальной ориентации КА из начального положения относительно ОСК по курсу ${{\psi }_{0}} = 110^\circ $, по тангажу ${{\vartheta }_{0}} = - 130^\circ $ и по крену ${{\gamma }_{0}} = 170^\circ $. Моделирование проводилось для КА массой 350 кг, орбита околокруговая, высота 500 км, наклонение орбиты 62°, магнитное поле МПЗ – прямой диполь, исполнительные органы – маховики с кинетическим моментом 5 нмс (максимальный момент 0.05 нм), закон управления $L$ – пропорциональный.
Рис. 1.
Восстановление ориентации КА и соответствующий процесс совмещения векторов магнитной индукции. Величины магнитной индукции даны в теслах в масштабе 10 × 10–5, время по оси абсцисс – в секундах в масштабе 1 × 104 (1 – в ССК, 2 – в ОСК).
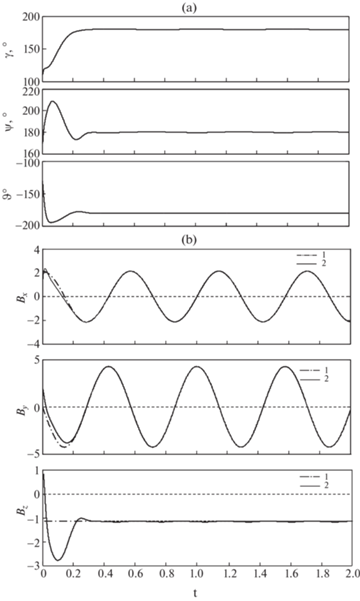
ROM восстановил ориентацию КА за время ~3000 c (рис. 1,a). На рис. 1,b показаны проекции вектора магнитной индукции МПЗ на оси ОСК – пунктирная линия и на оси ССК (показания МГМ) – сплошная линия. Векторы A и ${{B}_{o}}$ совмещаются по мере затухания переходных процессов.
2. Программные повороты. ROM, наряду со свойством восстановления ориентации, позволяет ориентировать КА относительно ОСК по заданной программе углового движения.
Введем программную систему координат (ПСК) в которую требуется перевести космический аппарат. Положение ПСК относительно ОСК зададим текущими значениями программных углов ${{\psi }_{p}},\;{{\vartheta }_{p}},\;{{\gamma }_{p}}$ и программных угловых скоростей ${{\dot {\psi }}_{p}},{{\dot {\vartheta }}_{p}},{{\dot {\gamma }}_{p}}$ в каналах курса, тангажа и крена – оси Y, Z, X.
Перепроектируем вектор B магнитной индукции МПЗ на оси ПСК
где $P = {{P}_{\gamma }}{{P}_{\vartheta }}{{P}_{\psi }}$ – матрица программного поворота КА на углы ${{\psi }_{p}},\;{{\vartheta }_{p}},\;{{\gamma }_{p}}$ (${{P}_{\gamma }},\;{{P}_{\vartheta }},\;{{P}_{\psi }}$ – матрицы соответствующих плоских поворотов) и найдем по аналогии с (1.1) кватернион взаимной ориентации между векторами(2.1)
$\alpha = \frac{A}{{\left| A \right|}} = ({{a}_{x}},{{a}_{y}},{{a}_{z}}),\quad {{b}_{p}} = \frac{{{{B}_{p}}}}{{\left| {{{B}_{p}}} \right|}} = ({{b}_{{xp}}},{{b}_{{yp}}},{{b}_{{zp}}})$(2.2)
$\varphi {\text{ = }}{{\varphi }_{{\text{O}}}} + i{\kern 1pt} '{{\varphi }_{{xp}}} + j{\kern 1pt} '{{\varphi }_{{yp}}} + k{\kern 1pt} '{{\varphi }_{{zp}}}$Определим скорость КА (ССК) относительно ПСК
где S матрица, составленная из элементов кватерниона $\varphi $, ${{\omega }_{p}}$ – кососимметрическая матрица, составленная из элементов программной скорости ПСК относительно ОСК(2.3)
${{\omega }_{p}} = \left( {\begin{array}{*{20}{c}} {{{\omega }_{{xp}}}} \\ {{{\omega }_{{yp}}}} \\ {{{\omega }_{{zp}}}} \end{array}} \right){\text{ = }}{{P}_{\gamma }}{{P}_{\vartheta }}\left( {\begin{array}{*{20}{c}} 0 \\ {{{{\dot {\psi }}}_{p}}} \\ 0 \end{array}} \right) + {{P}_{\gamma }}\left( {\begin{array}{*{20}{c}} 0 \\ 0 \\ {{{{\dot {\vartheta }}}_{p}}} \end{array}} \right) + Е\left( {\begin{array}{*{20}{c}} {{{{\dot {\gamma }}}_{p}}} \\ 0 \\ 0 \end{array}} \right)$Стабилизацию КА будем выполнять относительно вектора $(i{\kern 1pt} '{{\varphi }_{{xp}}},j{\kern 1pt} '{{\varphi }_{{yp}}},k{\kern 1pt} '{{\varphi }_{{zp}}})$, для чего вычислим соответствующие скорости:
Фазовые координаты $\varphi ,\dot {\varphi }$ служат для формирования управляющих моментов, прилагаемых к корпусу КА по аналогии с (1.4)
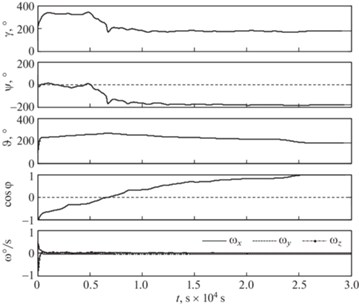
На рис. 2 показан программный поворот КА на углы ${{\gamma }_{p}} = 110^\circ $, ${{\psi }_{p}} = 170^\circ $, ${{\vartheta }_{p}} = 80^\circ $ для угла наклона орбиты $i = 62^\circ $. КА выполняет качественный программный поворот одновременно по всем каналам ориентации, cosφ характеризует программный поворот КА относительно вектора конечного поворота, вычисленный из матрицы $M(\psi ,\vartheta ,\gamma )$, где $\psi ,\;\vartheta ,\;\gamma $ – углы ориентации КА относительно ОСК по курсу, тангажу и крену.
Рис. 2.
Переходные процессы в каналах крена, курса и тангажа при выполнении программного поворота КА. Время по оси абсцисс – в секундах в масштабе 1 × 104.

Таким образом, ROM в форме (2.1)–(2.5) позволяет выполнять обе функции – восстановление ориентации КА из произвольного неориентированного положения и программные повороты КА относительно ОСК в любое требуемое программное угловое положение – ${{\psi }_{p}}{\text{,}}{{\vartheta }_{p}},{{\gamma }_{p}}$.
3. Особый случай. Применение ROM имеет некоторые ограничения, связанные с вырождением векторной составляющей кватерниона (1.1). Прежде заметим, что для работы алгоритма достаточно иметь две компоненты вектора магнитной индукции МПЗ, т.к. в этом случае существуют все три проекции векторов (1.1) и (2.2), в чем можно убедиться простым перебором. Если рассматривать упрощенную модель МПЗ в форме прямого диполя, то появляются два предельных случая для положения орбит $i = 0^\circ $ и $i = 90^\circ $. В первом случае “исчезают” две компоненты МПЗ и теоретически ВО выполнить нельзя, во втором случае – одна компонента МПЗ и теоретически ВО возможно. Однако для первого случая математическое моделирование процесса ВО с реальным МПЗ [18, 19] дает положительный результат (рис. 3), что объясняется присутствием небольших составляющих МПЗ по осям ${{X}_{0}}$ и Y0 ОСК в реальном МПЗ.
Рис. 3.
Восстановление ориентации КА относительно ОСК для экваториального положения плоскости орбиты i = 0°. Время по оси абсцисс – в секундах в масштабе 1 × 104.
Во втором случае для $i = 90^\circ $ “неудобные” начальные положения КА имеют место на широтах положения КА u = 0°, u = 180° и u = ±90° и для начальных положений КА относительно ОСК: $\psi (0) = \vartheta (0) = \gamma (0) = \pm 90^\circ $. В этих положениях кватернион (1.1) может иметь только одну компоненту, что затрудняет процесс ВО. В реальном МПЗ таких проблем практически не будет, так как, даже при небольшом отклонении КА из этих положений, процесс ВО выполняется. Однако можно рекомендовать перед включением алгоритма ВО проверять состояние кватерниона (1.1).
4. Точность ориентации. Собственную точность МГСО можно оценить, приняв во внимание инструментальную погрешность, которую вносит магнитометр и методическую погрешность, обусловленную неточным знанием МПЗ. Не рассматриваются ошибки ориентации вследствие несовершенства гироскопов и исполнительных органов, так как они являются общими для систем угловой ориентации КА, так же пренебрежем погрешностями интегрирования уравнений алгоритма. Кроме того, будем полагать, что чувствительные элементы МГМ (зонды) достаточно удалены от магнитных масс КА, например, на выносных штангах, и измеряют только составляющие МПЗ.
Математическую модель выходных сигналов МГМ представим в виде:
(4.1)
${{{\rm A}}_{{\rm I}}} = {{{\rm M}}_{\varepsilon }}{{{\rm M}}_{{\psi ,\vartheta ,\gamma }}}({{{\rm B}}_{o}} + \mu )(1 + \alpha ) + {{0}_{{\rm I}}}$Для современных МГМ примем ${{0}_{{{\rm I}{\text{ }}x{\text{,}}y{\text{,}}z}}} \leqslant 20$ нТл, $\alpha = 0.5\% $, ${{\varepsilon }_{{x,y,z}}}$ = 1–15'. Погрешность $\mu $ математической модели МПЗ по IGRF по разным данным [18, 21] находится на уровне $\left| \mu \right|$ ≤ 10–200 нТл, носит случайный характер.
Исследования показали, что наибольшее влияние на погрешность МГСО оказывает неортогональность измерительных осей МГМ. На рис. 4 показана суммарная максимальная погрешность МГСО в установившемся режиме ориентации КА относительно ОСК в зависимости от параметра $\varepsilon $ после восстановления ориентации из начального положения $\psi (0) = \vartheta (0) = \gamma (0) = 10^\circ $ и $p = q = r = 0$.
Рис. 4.
Зависимость ошибок ориентации КА от неортогональности осей чувствительности МГМ, в угловых минутах.
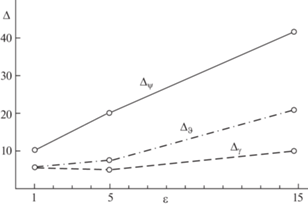
Из графика видно, что погрешность МГСО существенно зависит от неортогональности измерительных осей МГМ. Лучшая точность, полученная для условий эксперимента, составила 5–10' в точке неортогональности осей ~1'. Погрешность МГСО по скорости во всех случаях не превысила значений $\left| \omega \right| \leqslant 0.001$°/с.
Множественные моделирования показали, что потенциал повышения точности МГСО находится, главным образом, в улучшении динамических свойств КА и проведении прецизионных настроек МГМ в лабораторных условиях.
Выводы. Рассмотрена МГСО околоземного орбитального космического аппарата, в состав которой введен трехкомпонентный магнитометр в качестве датчика угловой ориентации. Получен алгоритм, названный ROM, позволяющий в исходной структуре МГСО восстанавливать орбитальную ориентацию КА из начального неориентированного положения, а также задавать программный базис ориентации КА относительно ОСК без ограничений на величину программных углов. Показан особый случай работы алгоритма ROM, где его применение испытывает осложнения. Дана оценка точности ориентации КА, приведены результаты моделирования.
Предложенный принцип построения МГСО с алгоритмом ROM может быть одинаково успешно реализован как на тяжелых КА, так и на небольших спутниках микро- и наноразмеров.
Следует отметить низкое энергопотребление МГМ, а также низкую стоимость МГСО в силу небольшой стоимости магнитометра или вследствие применения магнитометра из состава “штатной” системы сброса накопленного кинетического момента.
Список литературы
Бабич С.А., Костюков А.С. Обзор и сравнение систем ориентации наноспутников класса CubeSAT // Решетневские чтения. 2014. Т. 1. № 18. С. 495–497.
Ефименко Н.В., Луценко Н.В. Синтез управления для магнитной системы ориентации и стабилизации космического аппарата // Радіоелектроніка, інформатика, управління. 2000. № 2 (4). С. 121–124.
Ивлев Н.А., Карпенко С.О., Сивков А.С., Иванов Д.С., Ткачёв С.С., Ролдугин Д.С. Разработка системы ориентации и стабилизации микроспутников // Механика, управление и информатика. 2014. Т. 6. № 1. С. 43–60.
Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. М.: Машиностроение, 1975. 247 с.
Козаков А.В. Магнитогироскопическая система–достойный соперник гравитационной системы ориентации на малых спутниках // Вопросы электромеханики. Труды ВНИИЭМ. 2001. Т. 100. С. 156–176.
Крамлих А.В., Мельник М.Е. Бортовой алгоритм для системы ориентации и стабилизации наноспутника SamSat-218Д // Вестн. Самарского ун-та. Аэрокосм. техн. технол. машиностр. 2016. Т. 15. № 2. С. 50–56. https://doi.org/10.18287/2412-7329-2016-15-2-50-56
Лебедев Д.В., Ткаченко А.И., Штепа Ю.Н. Магнитная система управления угловым движением микроспутника // Космiчна наука i технологiя. 1996. Т. 2. № 5–6. С. 17–25. https://doi.org/10.15407/knit1996.05.017
Морозов В.М., Каленова В.И. Управление спутником при помощи магнитных моментов: управляемость и алгоритмы стабилизации // Косм. иссл. 2020. Т. 58. № 3. С. 199–207. https://doi.org/10.31857/S0023420620030048
Abezyaev I.N., Velichko P.E., Karpunin A.A., Potselovkin A.I., Tytkov I.P. Development of the algorithm of the spacecraft programmed yaw turns with the use of orbital gyrocompass // AIP Conf. Proc. 2019. V. 2171. № 1. P. 060009. https://doi.org/10.1063/1.5133207
Abdelrahman M., Park S.-Y. Simultaneous spacecraft attitude and orbit estimation using magnetic field vector measurements // Aerosp. Sci. Technol. 2011. V. 15. № 8. P. 653–669. https://doi.org/10.1016/j.ast.2011.01.006
Gulmammadov F., Kahraman O., Yavuzyilmaz C., Tufekci C.S., Subasi Y. Magnetorquers only attitude maintaining using dynamic attitude simulator environment // AIAA Modeling and Simulation Technologies Conference. Toronto. 2010. AIAA, 2010. P. 8106. https://doi.org/10.2514/6.2010-8106
Lovera M., Astolfi A. Global magnetic attitude control of inertially pointing spacecraft // J. Guid. Contr. Dyn. 2005. V. 28. № 5. P. 1065–1072.https://doi.org/10.2514/1.11844
Della Rossa F., Bergamasco M., Lovera M. Bifurcation analysis of the attitude dynamics for a magnetically controlled spacecraft // 2012 IEEE 51st IEEE Conference on Decision and Control (CDC). IEEE, 2012. P. 1154–1159. https://doi.org/10.1109/CDC.2012.6426150
Silani E., Lovera M. Magnetic spacecraft attitude control: a survey and some new results // Contr. Eng. Pract. 2005. V. 13. № 3. P. 357–371. https://doi.org/10.1016/j.conengprac.2003.12.017
Wang P., Shtessel Y., Wang Y.-Q. Satellite attitude control using only magnetorquers // Proceedings of the Thirtieth Southeastern Symposium on System Theory. IEEE, 1998. P. 500–504. https://doi.org/10.1109/SSST.1998.660124
Абезяев И.Н. Гибридная система ориентации для орбитальных космических аппаратов // Изв. РАН. МТТ. 2021. № 4. С. 36–43. https://doi.org/10.31857/S0572329921030028
Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах управления положением твердого тела // Изв. АН СССР. МТТ. 1972. № 4. С. 24–31.
International Geomagnetic Reference Field (IGRF) – международное геомагнитное аналитической поле. 2020. https://www.ngdc.noaa.gov/IAGA/vmod/igrf.html
ГОСТ 25645.126-85 Поле геомагнитное. Модель поля внутри земных источников. М.: Госстандарт СССР, 1987. 23 с.
Голдстейн Г. Классическая механика. М.: Наука, 1975. 415 с.
Беляев М.Ю., Монахов М.И., Сазонов В.В. Оценка точности показаний магнитометра, установленного на Служебном модуле Международной космической станции // Препринты ИПМ им. М.В. Келдыша. 2012. № 54. 32 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика твердого тела