

Известия РАН. Механика твердого тела, 2022, № 6, стр. 28-40
УЧЕТ НЕЛИНЕЙНОСТИ КОЛЕБАНИЙ РЕЗОНАТОРОВ ПРИ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ВОЛНОВЫХ ТВЕРДОТЕЛЬНЫХ ГИРОСКОПОВ РАЗНЫХ ТИПОВ
А. А. Маслов a, *, Д. А. Маслов a, **, И. В. Меркурьев a, ***
a Национальный исследовательский университет “МЭИ”
Москва, Россия
* E-mail: MaslovAlA@mpei.ru
** E-mail: MaslovDmA@mpei.ru
*** E-mail: MerkuryevIV@mpei.ru
Поступила в редакцию 24.12.2021
После доработки 26.12.2021
Принята к публикации 27.12.2021
- EDN: BWSHFH
- DOI: 10.31857/S0572329922050099
Аннотация
Рассматривается учет нелинейности колебаний резонаторов в методиках идентификации параметров волновых твердотельных гироскопов. Определяемыми являются параметры, характеризующие демпфирование, анизотропию демпфирования, разночастотность, а также коэффициенты нелинейности математических моделей динамики резонаторов волновых твердотельных гироскопов. В зависимости от типа резонаторов и датчиков управления предлагаются методики идентификации параметров в режимах свободного выбега и вынужденных колебаний с учетом разных типов нелинейностей: нелинейностей третьей, пятой степени, нелинейности, влияющей на управление. Даны алгоритмы определения оценок параметров и их доверительных интервалов при случайных погрешностях измерений. По результатам обработки данных показано, что учет нелинейности колебаний резонаторов существенно повышает точность определения параметров волновых твердотельных гироскопов. Приведены уравнения, показывающие влияние коэффициентов нелинейности и параметров, характеризующих разночастотность и анизотропию демпфирования, на угловую скорость дрейфа гироскопа.
1. Введение. В настоящее время волновые твердотельные гироскопы (ВТГ) находят широкое применение в качестве датчиков инерциальной информации навигационных систем, причем масштаб исследований и разработок ВТГ в ближайшее время будет расширяться, способствуя повышению точности гироскопов [1, 2]. Задача идентификации параметров резонатора ВТГ является одной из задач, решение которой направленно на повышение точности ВТГ.
Основы теории ВТГ заложены в работах Д.М. Климова и В.Ф. Журавлева [3–7]. В [4, 7] показано, что погрешность, вызванная нелинейными свойствами колебательной системы, присуща всем ВТГ, а исследование динамики может проводиться в рамках одних и тех же уравнений, аналогичных уравнениям классического маятника Фуко. Вопросы идентификации погрешностей изготовления резонаторов ВТГ рассмотрены в [4, 7–13]. В указанных работах при определении параметров гироскопа использовались линейные уравнения малых колебаний резонатора. В [14–16] отмечено, что при экспериментальных исследованиях динамики вибрационных гироскопов были обнаружены явления, характерные для нелинейных систем, например, срыв колебаний в режиме вынужденных колебаний. Пренебрежение нелинейностью возможно лишь при малых амплитудах колебаний, при которых отношение сигнала к шуму недостаточно высокое. Для его повышения следует увеличивать амплитуду колебаний, однако при этом возрастают погрешности, вызванные нелинейностью. В [17–22] предложены методики определения параметров ВТГ с кольцевым и цилиндрическим резонаторами при учете нелинейности. Идентификация может выполняться в режиме свободного выбега, в режиме вынужденных колебаний и в режиме управляемой прецессии [23]. У кварцевых полусферических и цилиндрических резонаторов, обладающих высокой добротностью, ширина резонанса мала для снятия данных при регулировании частотной настройки, а время затухания колебаний велико и достаточно для снятия данных в режиме свободного выбега. Для резонаторов с меньшей добротностью, например, кольцевых резонаторов микромеханических ВТГ, время затухания мало, но есть возможность снимать данные при разных значениях частотной настройки в режиме вынужденных колебаний.
В данной статье уточняются и обобщаются результаты предшествующих работ по учету нелинейности в методиках идентификации параметров ВТГ путем введения коэффициентов нелинейности в определяемые параметры [17–22]. Ставятся задачи обобщить учет нелинейностей третьей и пятой степени на методику идентификации параметров в режиме свободного выбега, определить классы гироскопов и типы нелинейностей для применения методик идентификации параметров, показать влияние определяемых параметров на угловую скорость дрейфа ВТГ.
Найденные при идентификации параметры, включая технологические погрешности изготовления резонатора и коэффициенты нелинейности, могут использоваться для повышения точности определения угловой скорости в методиках компенсации погрешностей [24] или для повышения точности балансировки резонаторов [25, 26].
2. Определение параметров ВТГ в режиме свободного выбега. Рассматривается ВТГ с кварцевым резонатором, представленным упругой осесимметричной оболочкой вращения. Обычно подобные резонаторы изготавливаются в виде полусферы или цилиндра и обладают малыми потерями на внутреннее трение, соответственно, имеют высокую добротность. Поэтому для ВТГ с кварцевым резонатором в виде оболочки вращения рассмотрим идентификацию параметров в режиме свободного выбега.
В [27] выведены уравнения динамики цилиндрического резонатора ВТГ с учетом нелинейных свойств электростатических датчиков управления, которые представляют собой конденсаторы, образованные металлизированной поверхностью резонатора и электродами, расположенными вблизи свободной кромки резонатора,
(2.1)
$\begin{gathered} \ddot {f} + {{\omega }^{2}}f = - \gamma \dot {f} + {v}\dot {g} + \\ + \;\eta \left( {3({{f}^{2}} + {{g}^{2}})f + \frac{{15}}{4}{{{({{f}^{2}} + {{g}^{2}})}}^{2}}f + (1 + 3{{f}^{2}})( - {{u}_{1}}\sin {{\omega }_{0}}t + {{u}_{2}}\cos {{\omega }_{0}}t)} \right) - \\ - \;\frac{\eta }{2}((u_{1}^{2} - u_{2}^{2})\cos 2{{\omega }_{0}}t + 2{{u}_{1}}{{u}_{2}}\sin 2{{\omega }_{0}}t)f \\ \ddot {g} + {{\omega }^{2}}g = - \gamma \dot {g} - {v}\dot {f} + \\ + \;\eta \left( {3({{f}^{2}} + {{g}^{2}})g + \frac{{15}}{4}{{{({{f}^{2}} + {{g}^{2}})}}^{2}}g + (1 + 3{{g}^{2}})( - {{u}_{3}}\sin {{\omega }_{0}}t + {{u}_{4}}\cos {{\omega }_{0}}t)} \right) - \\ - \;\frac{\eta }{2}((u_{3}^{2} - u_{4}^{2})\cos 2{{\omega }_{0}}t + 2{{u}_{3}}{{u}_{4}}\sin 2{{\omega }_{0}}t)g \\ \end{gathered} $(2.2)
$\begin{gathered} \ddot {f} + {{\omega }^{2}}f = - \gamma \dot {f} + {v}\dot {g} + \xi ({{f}^{2}} + {{g}^{2}})f + \kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}f \\ \ddot {g} + {{\omega }^{2}}g = - \gamma \dot {g} - {v}\dot {f} + \xi ({{f}^{2}} + {{g}^{2}})g + \kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}g \\ \end{gathered} $В [4, 7, 8] проведен анализ сил, являющихся следствием разнообразных дефектов резонатора, и вызываемой этими силами эволюции формы колебаний резонатора. С учетом наиболее общего [4] представления действующих на резонатор возмущений, нелинейные уравнения динамики (2.2) могут быть записаны в следующем виде:
(2.3)
$\begin{gathered} \ddot {f} + {{\omega }^{2}}f = - (\gamma + {{b}_{c}})\dot {f} - ( - \nu + {{b}_{s}})\dot {g} - ({{c}_{m}} + {{h}_{c}})f - (n + {{h}_{s}})g + \\ + \;\xi ({{f}^{2}} + {{g}^{2}})f + \kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}f \\ \ddot {g} + {{\omega }^{2}}g = - (\gamma - {{b}_{c}})\dot {g} - (\nu + {{b}_{s}})\dot {f} - ({{c}_{m}} - {{h}_{c}})g - ( - n + {{h}_{s}})f + \\ \, + \xi ({{f}^{2}} + {{g}^{2}})g + \kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}g \\ \end{gathered} $Используя метод осреднения Крылова–Боголюбова [28] и переменные Ван-дер-Поля, с помощью замены
(2.4)
$\begin{gathered} f = {{p}_{1}}\sin \omega t + {{q}_{1}}\cos \omega t,\quad \dot {f} = \omega ({{p}_{1}}\cos \omega t - {{q}_{1}}\sin \omega t) \\ g = {{p}_{2}}\sin \omega t + {{q}_{2}}\cos \omega t,\quad \dot {g} = \omega ({{p}_{2}}\cos \omega t - {{q}_{2}}\sin \omega t) \\ \end{gathered} $(2.5)
$\begin{gathered} 2{{{\dot {q}}}_{1}} = - \gamma {{q}_{1}} - {{b}_{c}}{{q}_{1}} + \nu {{q}_{2}} - {{b}_{s}}{{q}_{2}} + {{{\tilde {c}}}_{m}}{{p}_{1}} + {{{\tilde {h}}}_{c}}{{p}_{1}} + \tilde {n}{{p}_{2}} + {{{\tilde {h}}}_{s}}{{p}_{2}} + \tilde {\xi }{{k}_{1}} + \tilde {\kappa }{{k}_{5}} \\ 2{{{\dot {p}}}_{1}} = - \gamma {{p}_{1}} - {{b}_{c}}{{p}_{1}} + \nu {{p}_{2}} - {{b}_{s}}{{p}_{2}} - {{{\tilde {c}}}_{m}}{{q}_{1}} - {{{\tilde {h}}}_{c}}{{q}_{1}} - \tilde {n}{{q}_{2}} - {{{\tilde {h}}}_{s}}{{q}_{2}} + \tilde {\xi }{{k}_{2}} + \tilde {\kappa }{{k}_{6}} \\ 2{{{\dot {q}}}_{2}} = - \gamma {{q}_{2}} + {{b}_{c}}{{q}_{2}} - \nu {{q}_{1}} - {{b}_{s}}{{q}_{1}} + {{{\tilde {c}}}_{m}}{{p}_{2}} - {{{\tilde {h}}}_{c}}{{p}_{2}} - \tilde {n}{{p}_{1}} + {{{\tilde {h}}}_{s}}{{p}_{1}} + \tilde {\xi }{{k}_{3}} + \tilde {\kappa }{{k}_{7}} \\ 2{{{\dot {p}}}_{2}} = - \gamma {{p}_{2}} + {{b}_{c}}{{p}_{2}} - \nu {{p}_{1}} - {{b}_{s}}{{p}_{1}} - {{{\tilde {c}}}_{m}}{{q}_{2}} + {{{\tilde {h}}}_{c}}{{q}_{2}} + \tilde {n}{{q}_{1}} - {{{\tilde {h}}}_{s}}{{q}_{1}} + \tilde {\xi }{{k}_{4}} + \tilde {\kappa }{{k}_{8}} \\ \end{gathered} $Заметим, что в электронном контуре гироскопа физически реализуется схема осреднения [13]: с помощью емкостной системы электродов измеряются высокочастотные функции времени f(t), g(t) и с помощью контуров обработки сигналов выделяются огибающие ${{q}_{1}}(t),$ ${{p}_{1}}(t),$ ${{q}_{2}}(t),$ ${{p}_{2}}(t)$. Таким образом, медленные переменные ${{q}_{1}}(t),$ ${{p}_{1}}(t),$ ${{q}_{2}}(t),$ ${{p}_{2}}(t)$ системы (2.5) являются измеряемыми.
Запишем систему (2.5) в векторно-матричном виде:
где вектор медленных переменных матрицу D и вектор определяемых параметров z задаем в блочной форме:С помощью данной записи, в зависимости от количества блоков, мы можем записать как линейную математическую модель, так и обе нелинейные математические модели: с кубической нелинейностью (коэффициент нелинейности $\tilde {\xi }$, k = 9 параметров) и с нелинейностью пятой степени (два коэффициента нелинейности $\tilde {\xi }$ и $\tilde {\kappa }$, k = 10 параметров).
Начальным моментом съема данных является момент отключения управляющего напряжения в режиме стационарных колебаний. Для обработки данных, берется массив значений затухающих медленных переменных так, чтобы в конце процесса была достаточная амплитуда колебаний для отличия их от случайных помех. Лучше брать начальный участок процесса затухания колебаний, на котором наибольшим образом изменяются медленные переменные. Обозначим отрезок времени наблюдений [0, T] и разобьем его на N равных частей: ${{t}_{i}} = i \cdot {{h}_{t}},$ ${{h}_{t}} = T{\text{/}}N$ – шаг по времени, $i = 0 \ldots N$. Определяемые параметры считаем постоянными на [0, T].
Интегрируем левую и правую часть (2.6) на отрезках $\left[ {{{t}_{{i - 1}}},{{t}_{{i + 1}}}} \right]$:
(2.7)
$q({{t}_{{i + 1}}}) - q({{t}_{{i - 1}}}) = \frac{1}{2}{{{\mathbf{D}}}_{i}} \cdot z,\quad i = 1,\;2,\; \ldots ,\;N - 1$Рассмотрим сначала оценку вектора параметров z по методу наименьших квадратов. Тогда для линейной регрессии (2.8) получим оценку:
(2.9)
${\mathbf{\hat {z}}} = {{({{{\mathbf{\bar {D}}}}^{{\text{т}}}}{\mathbf{\bar {D}}})}^{{ - 1}}}{{{\mathbf{\bar {D}}}}^{{\text{т}}}}{\mathbf{y}}$Оценка (2.9) минимизирует сумму квадратов отклонений $S = {{({\mathbf{y}} - {\mathbf{\bar {D}\hat {z}}})}^{{\text{т}}}}({\mathbf{y}} - {\mathbf{\bar {D}\hat {z}}}).$ Оценка среднеквадратического отклонения:
где n = 4(N – 2) – размерность вектора измерений y, k – число определяемых параметров.Доверительные интервалы для определяемых параметров оцениваем по формуле [29]:
(2.11)
${{\hat {z}}_{j}} - {{s}_{p}}\hat {\sigma }\sqrt {{{c}_{{jj}}}} \leqslant {{z}_{j}} \leqslant {{\hat {z}}_{j}} + {{s}_{p}}\hat {\sigma }\sqrt {{{c}_{{jj}}}} ,\quad j = 1\; \ldots \;k$Получаемые в результате измерений данные поступают последовательно, поэтому целесообразно рассмотреть для данной методики применение рекуррентного метода наименьших квадратов.
Пусть на некотором начальном этапе измерений выбран отрезок времени $[0,{{t}_{m}}]$, где m много меньше N. Для инициализации рекуррентного метода наименьших квадратов определяем оценку параметров по методу наименьших квадратов (2.10):
(2.12)
$\begin{gathered} {{{\mathbf{S}}}_{{i + 1}}} = {{{\mathbf{P}}}_{i}}{{{\mathbf{r}}}_{i}}({\mathbf{E}} - {{({\mathbf{E}} + {\mathbf{r}}_{i}^{{\text{т}}}{{{\mathbf{P}}}_{i}}{{{\mathbf{r}}}_{i}})}^{{ - 1}}}{\mathbf{r}}_{i}^{{\text{т}}}{{{\mathbf{P}}}_{i}}{{{\mathbf{r}}}_{i}}) \\ {{{{\mathbf{\hat {z}}}}}_{{i + 1}}} = {{{{\mathbf{\hat {z}}}}}_{i}} + {{{\mathbf{S}}}_{{i + 1}}} \cdot \left( {{{{\mathbf{y}}}_{{i + 1}}} - {{{{\mathbf{\hat {y}}}}}_{{i + 1}}}} \right) \\ {{{\mathbf{P}}}_{{i + 1}}} = {{{\mathbf{P}}}_{i}} - {{{\mathbf{S}}}_{{i + 1}}}{\mathbf{r}}_{i}^{{\text{т}}}{{{\mathbf{P}}}_{i}} \\ \end{gathered} $3. Определение параметров ВТГ в режиме вынужденных колебаний. Значения добротности у кольцевых резонаторов микромеханических ВТГ значительно ниже, чем у рассмотренных ранее полусферических и цилиндрических резонаторов прецизионных ВТГ. Поэтому продолжительность свободного выбега микромеханического ВТГ недостаточна для проведения идентификации параметров, и нужно рассматривать данные, полученные в режиме вынужденных колебаний при разных значениях частотной настройки вблизи резонанса. Волновые твердотельные гироскопы в микромеханическом исполнении обычно имеют кольцевой резонатор с магнитоэлектрическими датчиками управления, реже – с электростатическими датчиками управления [13]. Предлагаемая методика может использоваться для определения параметров ВТГ и с другими типами резонаторов в случае, если есть возможность провести достаточное количество измерений медленных переменных на резонансном пике при изменении частотной настройки.
При использовании в ВТГ электростатических датчиков управления, уравнения вынужденных колебаний имеют вид аналогичный (2.1), запишем их с коэффициентами, учитывающими разные типы нелинейностей:
(3.1)
$\begin{gathered} \ddot {f} + {{\omega }^{2}}f = - \gamma \dot {f} + {v}\dot {g} + \xi ({{f}^{2}} + {{g}^{2}})f + \\ + \;\kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}f + \eta (1 + 3\mu {{f}^{2}})( - {{u}_{1}}\sin {{\omega }_{0}}t + {{u}_{2}}\cos {{\omega }_{0}}t) \\ \ddot {g} + {{\omega }^{2}}g = - \gamma \dot {g} - {v}\dot {f} + \xi ({{f}^{2}} + {{g}^{2}})g + \\ + \;\kappa {{({{f}^{2}} + {{g}^{2}})}^{2}}g + \eta (1 + 3\mu {{g}^{2}})( - {{u}_{3}}\sin {{\omega }_{0}}t + {{u}_{4}}\cos {{\omega }_{0}}t) \\ \end{gathered} $При использовании магнитоэлектрических датчиков управления введенный параметр μ = 0, коэффициенты ξ, $\kappa $, η определяются не нелинейностью, вызванной электростатическими датчиками управления, а другими факторами [13]. Поэтому предложим методику идентификации с возможностью учитывать разные типы нелинейностей.
Аналогично (2.3) вводя в (3.1) возмущения, вызванные дефектами резонатора, и осредняя полученные уравнения, выведем уравнения в медленных переменных:
(3.2)
$\begin{gathered} 2{{{\dot {p}}}_{1}} = - \gamma {{p}_{1}} - {{b}_{c}}{{p}_{1}} + \nu {{p}_{2}} - {{b}_{s}}{{p}_{2}} - {{{\tilde {c}}}_{m}}{{q}_{1}} - {{{\tilde {h}}}_{c}}{{q}_{1}} - \tilde {n}{{q}_{2}} - {{{\tilde {h}}}_{s}}{{q}_{2}} + \hfill \\ ~~~~~~~~~~~~~~~~ + \;2\lambda {{q}_{1}} + \tilde {\xi }{{k}_{2}} + \tilde {\kappa }{{k}_{6}} + {{{\tilde {u}}}_{2}}\left( {1 + \mu {{k}_{{12}}}} \right) + \mu {{{\tilde {u}}}_{1}}{{k}_{9}} \hfill \\ 2{{{\dot {q}}}_{2}} = - \gamma {{q}_{2}} + {{b}_{c}}{{q}_{2}} - \nu {{q}_{1}} - {{b}_{s}}{{q}_{1}} + {{{\tilde {c}}}_{m}}{{p}_{2}} - {{{\tilde {h}}}_{c}}{{p}_{2}} - \tilde {n}{{p}_{1}} + {{{\tilde {h}}}_{s}}{{p}_{1}} - \hfill \\ ~~~~~~~~~~~~~~~~ - \;2\lambda {{p}_{2}} + \tilde {\xi }{{k}_{3}} + \tilde {\kappa }{{k}_{7}} + {{{\tilde {u}}}_{3}}\left( {1 + \mu {{k}_{{13}}}} \right) + \mu {{{\tilde {u}}}_{4}}{{k}_{{10}}} \hfill \\ \end{gathered} $Остальные обозначения в (3.2) аналогичны введенным после уравнений (2.5) и (2.6).
Запишем (3.2) в векторно-матричном виде:
Для идентификации параметров рассмотрим стационарные режимы вынужденных колебаний резонатора, ${{\dot {q}}_{1}} = \,{{\dot {p}}_{1}} = {{\dot {q}}_{2}} = {{\dot {p}}_{2}} = 0$. Стационарные значения медленных переменных ${{q}_{1}}(t),$ ${{p}_{1}}(t),$ ${{q}_{2}}(t),$ ${{p}_{2}}(t)$ являются измеряемыми и соответствуют разным значениям частотной настройки $\lambda = {{\lambda }_{j}}$, где $j = 1,\; \ldots ,\;N$, N – число стационарных режимов колебаний резонатора. Соответствующие ${{\lambda }_{j}}$ стационарные системы уравнений (3.3) являются алгебраическими и имеют вид
(3.4)
${{{\mathbf{y}}}_{j}} = {{{\mathbf{D}}}_{j}} \cdot {\mathbf{z}} + {{{\mathbf{e}}}_{j}},\quad j = 1,\; \ldots ,\;N$Далее составим переопределенную систему линейных алгебраических уравнений из N блоков (3.4), соответствующих заданным частотным настройкам
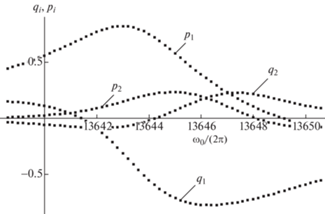
${\mathbf{\bar {D}}} = {{({\mathbf{D}}_{1}^{{\text{т}}},{\mathbf{D}}_{2}^{{\text{т}}},\; \ldots ,\;{\mathbf{D}}_{N}^{{\text{т}}})}^{{\text{т}}}},y = {{(y_{1}^{{\text{т}}},y_{2}^{{\text{т}}},\; \ldots ,\;y_{N}^{{\text{т}}})}^{{\text{т}}}},e = {{(e_{1}^{{\text{т}}},e_{2}^{{\text{т}}},\; \ldots ,\;e_{N}^{{\text{т}}})}^{{\text{т}}}}$. Размерность векторов ${\mathbf{y}}$ и ${\mathbf{e}}$ равняется числу уравнений переопределенной системы $n = 4N,$ размерность вектора z равняется числу идентифицируемых параметров k. Минимальное число измерений, необходимое для определения возможного числа k < 15 параметров, N = 4 задает 16 уравнений в системе (3.5). Оценка вектора параметров z может быть найдена по методу наименьших квадратов (2.9), оценки доверительных интервалов для параметров – по формуле (2.11).4. Обработка экспериментальных данных. Рассматривались вынужденные колебания кольцевого резонатора микромеханического ВТГ с магнитоэлектрическими датчиками управления. Считаем, что динамика резонатора описывается уравнениями, имеющими вид (3.1) при μ = 0. В результате экспериментального наблюдения вынужденных колебаний резонатора [18, 30] получены стационарные значения медленных переменных ${{q}_{i}} = {{q}_{i}}({{\omega }_{{0j}}})$, ${{p}_{i}} = {{p}_{i}}({{\omega }_{{0j}}})$, $i = 1,\;2$, соответствующие частотам вынужденных колебаний ${{\omega }_{0}} = {{\omega }_{{0j}}},$ $j = 1\; \ldots $ N, N = 61 (рис. 1). Для нормализации величин ${{q}_{i}}$, ${{p}_{i}}$, $i = 1,\;2$, использовалось максимальное значение амплитуды колебаний резонатора. Характерная частота собственных колебаний резонатора ω = 85732 c–1 (13645 Гц).
Рис. 1.
Зависимости медленных переменных ${{p}_{1}}$, q1, ${{p}_{2}}$, q2 от частоты колебаний $\frac{{{{\omega }_{0}}}}{{2\pi }}$ [Гц].
Определяем оценку вектора параметров по математической модели, содержащей только кубическую нелинейность (ξ ≠ 0, $\kappa $= 0, μ = 0). Получен результат:
По полученной оценке вектора запишем параметры ВТГ. Коэффициент демпфирования $\gamma = 43.029$ c–1, добротность $Q = \omega {\text{/}}\gamma = 1992$. Для кольцевого резонатора масштабный коэффициент $K = 0.4$, поэтому абсолютное значение нулевого сигнала $\Omega \, = \,1.268$ c–1. Погрешность характерной частоты собственных колебаний $\Delta \omega = {{\tilde {c}}_{m}}{\text{/2}}$ = = 12.179 c–1 (1.94 Гц). Расщепление частот ${{\omega }_{{\max }}} - {{\omega }_{{\min }}} = \sqrt {{{{({{{\tilde {h}}}_{c}})}}^{2}} + {{{({{{\tilde {h}}}_{s}})}}^{2}}} $ = 17.264 c–1 (2.748 Гц). Анизотропия демпфирования ${{\gamma }_{{\max }}} - {{\gamma }_{{\min }}} = 2\sqrt {b_{s}^{2} + b_{c}^{2}} $ = 3.848 c–1. Углы главных осей жесткости и диссипации равны соответственно $\alpha = 0.601$ рад (34.4°) и $\beta = - 0.201$ рад (–11.5°). Полученные результаты для невакуумированного несбалансированного кольцевого резонатора соответствуют известным данным [31].
При идентификации параметров по предложенной методике оценка среднеквадратического отклонения составила $\hat {\sigma } = 0.0926$. В случае идентификации параметров по линейной математической модели [30] получаем $\hat {\sigma } = 0.295$. Таким образом, учет коэффициента нелинейности ξ позволил уменьшить среднеквадратическое отклонение в 3.2 раза, что указывает на значительное повышение точности определения параметров ВТГ при учете нелинейности колебаний. Учет обоих коэффициентов нелинейности ξ и $\kappa $ позволил уменьшить среднеквадратическое отклонение в 1.4 раза по сравнению с результатами, полученными при учете только кубической нелинейности, $\hat {\sigma }$ = = 0.0656.
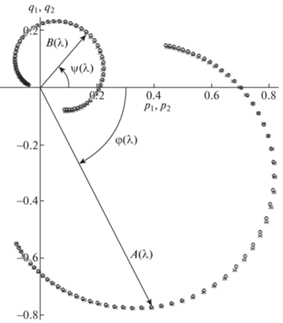
По найденным параметрам математической модели были рассчитаны невязки между модельными значениями и экспериментальными измерениями. На рисунках 2 и 3 представлено сравнение экспериментальных и расчетных амплитудно-фазочастотных характеристик (АФЧХ). Модули радиус-векторов равны амплитудам $A = \sqrt {q_{1}^{2} + p_{1}^{2}} $ и $B = \sqrt {q_{2}^{2} + p_{2}^{2}} $, а фазы колебаний φ и ψ определяются положением этих векторов на плоскости. В первом случае (рис. 2) оценка параметров ВТГ проводилась по линейной математической модели, ξ = 0, $\kappa $ = 0. Во втором случае (рис. 3) оценка параметров ВТГ проводилась по нелинейной математической модели с учетом кубической нелинейности ξ ≠ 0, $\kappa $ = 0. Из сравнения (рис. 2) экспериментальных и расчетных данных, полученных по результатам идентификации параметров линейной математической модели ВТГ, следует, что имеется систематическая погрешность. На рис. 3 экспериментальная и расчетная АФЧХ, полученная по результатам идентификации параметров по нелинейной математической модели ВТГ, практически совпадают. Учет нелинейности пятой степени, ξ ≠ 0, $\kappa $ ≠ 0, на АФЧХ визуально неотличим от рис. 3. Поэтому существенным является учет кубической нелинейности при идентификации параметров ВТГ, учет нелинейности пятой степени дает дополнительное повышение точности.

5. Зависимость угловой скорости дрейфа ВТГ от параметров резонатора и коэффициентов нелинейности. Исследование угловой скорости дрейфа ВТГ будем проводить при нулевых управляющих напряжениях ${{u}_{1}} = {{u}_{2}} = {{u}_{3}} = {{u}_{4}} = 0$, то есть, рассмотрим уравнения (2.3). Перейдем к переменным, называемым элементами орбиты [7]: $r(t)$ и $k(t)$ − амплитуды основной и квадратурной волн колебаний, $\theta (t)$ − угол прецессии, $\chi (t)$ − временная фаза,
(5.1)
$\begin{gathered} f = r\cos (\omega t + \chi )\cos 2\theta - k\sin (\omega t + \chi )\sin 2\theta {\text{ }} \\ g = r\cos (\omega t + \chi )\sin 2\theta + k\sin (\omega t + \chi )\cos 2\theta \\ \end{gathered} $Чтобы перейти от переменных ${{q}_{1}}(t),$ ${{p}_{1}}(t),$ ${{q}_{2}}(t),$ ${{p}_{2}}(t)$ в осредненных уравнениях (2.5) к $r(t)$, $k(t)$, $\theta (t)$, $\chi (t)$, будем использовать замену переменных:
(5.2)
$\begin{gathered} {{q}_{1}}{\text{ = }}r{\text{ cos}}2\theta {\text{ cos}}\chi - k{\text{ sin}}2\theta {\text{ sin}}\chi {\text{,}}\quad {{p}_{1}}{\text{ = }} - r{\text{ cos}}2\theta {\text{ sin}}\chi - k{\text{ sin}}2\theta {\text{ cos}}\chi \\ {{q}_{2}}{\text{ = }}r{\text{ sin}}2\theta {\text{ cos}}\chi + k{\text{ cos}}2\theta {\text{ sin}}\chi {\text{,}}\quad {{p}_{2}}{\text{ = }} - r{\text{ sin}}2\theta {\text{ sin}}\chi + k{\text{ cos}}2\theta {\text{ cos}}\chi \\ \end{gathered} $В результате преобразований получаем систему
(5.3)
$\dot {r} = \frac{1}{2}( - \gamma r + \tilde {n}k + ({{\tilde {h}}_{s}}k - {{b}_{c}}r)\cos 4\theta - ({{\tilde {h}}_{c}}k + {{b}_{s}}r)\sin 4\theta )$(5.4)
$\dot {k} = \frac{1}{2}( - \gamma k + \tilde {n}r - ({{\tilde {h}}_{s}}r - {{b}_{c}}k)\cos 4\theta + ({{\tilde {h}}_{c}}r + {{b}_{s}}k)\sin 4\theta )$(5.5)
$\begin{gathered} \dot {\theta } = - \frac{1}{4}\nu + \frac{{\tilde {\xi }}}{8}rk + \frac{{\tilde {\kappa }}}{8}rk({{r}^{2}} + {{k}^{2}}) - \\ - \;\frac{{rk}}{{2({{r}^{2}} - {{k}^{2}})}}\left( {{{{\tilde {h}}}_{c}}\cos 4\theta + {{{\tilde {h}}}_{s}}\sin 4\theta } \right) - \frac{{{{r}^{2}} + {{k}^{2}}}}{{4({{r}^{2}} - {{k}^{2}})}}\left( {{{b}_{s}}\cos 4\theta - {{b}_{c}}\sin 4\theta } \right) \\ \end{gathered} $(5.6)
$\begin{gathered} \dot {\chi } = \frac{1}{2}\tilde {c} - \frac{{3\tilde {\xi }}}{8}({{k}^{2}} + {{r}^{2}}) - \frac{{\tilde {\kappa }}}{{16}}(5{{k}^{4}} + 6{{k}^{2}}{{r}^{2}} + 5{{r}^{4}}) + \\ + \;\frac{{{{r}^{2}} + {{k}^{2}}}}{{2({{r}^{2}} - {{k}^{2}})}}({{{\tilde {h}}}_{c}}\cos 4\theta + {{{\tilde {h}}}_{s}}\sin 4\theta ) + \frac{{rk}}{{{{r}^{2}} - {{k}^{2}}}}\left( {{{b}_{s}}\cos 4\theta - {{b}_{c}}\sin 4\theta } \right) \\ \end{gathered} $Подставляя обозначения ${{\tilde {h}}_{s}} = {{\tilde {h}}_{m}}\sin 4\alpha $, ${{\tilde {h}}_{c}} = {{\tilde {h}}_{m}}\cos 4\alpha $, ${{b}_{s}} = {{b}_{m}}\sin 4\beta $, ${{b}_{c}} = {{b}_{m}}\cos 4\beta $ и используя тригонометрические формулы, преобразуем (5.3)−(5.6) к виду
(5.7)
$\dot {r} = \frac{1}{2}( - \gamma r + \tilde {n}k - {{\tilde {h}}_{m}}k\sin 4(\theta - \alpha ) - {{b}_{m}}r\cos 4(\theta - \alpha ))$(5.8)
$\dot {k} = \frac{1}{2}( - \gamma k + \tilde {n}r + {{\tilde {h}}_{m}}r\sin 4(\theta - \alpha ) + {{b}_{m}}k\cos 4(\theta - \alpha ))$(5.9)
$\begin{gathered} \dot {\theta } = - \frac{1}{4}\nu + \frac{{\tilde {\xi }}}{8}rk + \frac{{\tilde {\kappa }}}{8}rk({{r}^{2}} + {{k}^{2}}) - \\ - \;\frac{{rk}}{{2({{r}^{2}} - {{k}^{2}})}}{{{\tilde {h}}}_{m}}\cos 4(\theta - \alpha ) + \frac{{{{r}^{2}} + {{k}^{2}}}}{{4({{r}^{2}} - {{k}^{2}})}}{{b}_{m}}\sin 4(\theta - \alpha ) \\ \end{gathered} $(5.10)
$\begin{gathered} \dot {\chi } = \frac{1}{2}\tilde {c} - \frac{{3\tilde {\xi }}}{8}({{k}^{2}} + {{r}^{2}}) - \frac{{\tilde {\kappa }}}{{16}}(5{{k}^{4}} + 6{{k}^{2}}{{r}^{2}} + 5{{r}^{4}}) + \\ + \;\frac{{{{r}^{2}} + {{k}^{2}}}}{{2({{r}^{2}} - {{k}^{2}})}}{{{\tilde {h}}}_{m}}\cos 4(\theta - \alpha ) - \frac{{rk}}{{{{r}^{2}} - {{k}^{2}}}}{{b}_{m}}\sin 4(\theta - \alpha ) \\ \end{gathered} $Уравнения (5.7)−(5.10) соответствуют теории эволюций траектории резонатора ВТГ под воздействием возмущений, вызванных дефектами резонатора [7], но при этом учитывают влияние нелинейности колебаний. Из уравнения (5.9) следует, что угловая скорость дрейфа ВТГ зависит от коэффициентов ${{h}_{m}}$, ${{b}_{m}}$, характеризующих разночастотность и анизотропию демпфирования, а также от параметров $\tilde {\xi }$ и $\tilde {\kappa }$, характеризующих нелинейность колебаний резонатора.
6. Заключение. Разработаны методики идентификации параметров ВТГ с учетом разных типов нелинейности колебаний в двух режимах: свободного выбега и вынужденных колебаний. В режиме свободного выбега проводится идентификация параметров прецизионных ВТГ с кварцевыми резонаторами, обладающими высокой добротностью. Так как отключено управление, то для них учитывается только кубическая нелинейность и нелинейность пятой степени. В режиме вынужденных колебаний проводится идентификация параметров ВТГ с меньшей добротностью, позволяющей снимать данные в области резонансного пика при изменении частотной настройки. Проведена обработка экспериментальных данных, полученных для микромеханического ВТГ с кольцевым резонатором и магнитоэлектрическими датчиками управления. Показано, что учет кубической нелинейности существенно повышает точность определения параметров, учет нелинейности пятой степени дополнительно повышает точность определения параметров. Сделан вывод о необходимости учета кубической нелинейности путем введения коэффициента нелинейности в определяемые параметры ВТГ. Показано влияние определяемых параметров, включая коэффициенты нелинейностей, на угловую скорость дрейфа ВТГ.
Список литературы
Переляев С.Е. Обзор и анализ направлений создания бесплатформенных инерциальных навигационных систем на волновых твердотельных гироскопах // Новости навигации. 2018. № 2. С. 21–27.
Пешехонов В.Г. Перспективы развития гироскопии // Гироскопия и навигация. Т. 28. № 2 (109), 2020. С. 3–10. https://doi.org/10.17285/0869-7035.0028
Журавлев В.Ф., Климов Д.М. Волновой твердотельный гироскоп. М.: Наука, 1985. 125 с.
Климов Д.М., Журавлев В.Ф., Жбанов Ю.К. Кварцевый полусферический резонатор (волновой твердотельный гироскоп). М.: Изд-во “Ким Л.А.”, 2017. 194 с.
Журавлев В.Ф. Теоретические основы волнового твердотельного гироскопа (ВТГ) // Изв. РАН. МТТ. 1993. № 3. С. 6–19.
Журавлев В.Ф. О глобальных эволюциях состояния обобщенного маятника Фуко // Изв. РАН. МТТ. 1998. № 6. С. 5–11.
Журавлев В.Ф. Управляемый маятник Фуко как модель одного класса свободных гироскопов // Изв. РАН. МТТ. 1997. № 6. С. 27–35.
Журавлев В.Ф. Задача идентификации погрешностей обобщенного маятника Фуко // Изв. РАН. МТТ. 2000. № 5. С. 5–9.
Жбанов Ю.К., Журавлев В.Ф. О балансировке волнового твердотельного гироскопа // Изв. РАН. МТТ. 1998. № 4. С. 4–16.
Жбанов Ю.К. Контур управления амплитудой в волновом твердотельном гироскопе с автоматической компенсацией разнодобротности // Изв. РАН. МТТ. 2008. № 3. С. 17–22. https://doi.org/10.3103/S0025654408030035
Каленова Н.В. Определение параметров поверхностного дебаланса резонатора волнового твердотельного гироскопа по его реакции на угловую вибрацию основания // Изв. РАН. МТТ. 2004. № 2. С. 3–7.
Матвеев В.А., Липатников В.И., Алехин А.В. Проектирование волнового твердотельного гироскопа. М.: Изд-во МГТУ им. Н.Э. Баумана, 1997. 167 c.
Меркурьев И.В., Подалков В.В. Динамика микромеханического и волнового твердотельного гироскопов. М.: Физматлит, 2009. 228 с.
Астахов С.В. Нелинейные эффекты в динамике волнового твердотельного и микромеханического гироскопов в условиях медленно меняющихся параметров. Дисс. … канд. техн. наук. Москва, 2012. 157 с.
Sudipto K.De., Aluru N.R. Complex nonlinear oscillations in electrostatically actuated microstructures // J. Microelectromech. Sys. 2005. V. 15. № 2. P. 355–369. https://doi.org/10.1109/JMEMS.2006.872227
Rhoads J., Shaw S., Tunner K., Moehlis J., DeMartiniB., Zhang W. Generalized parametric resonance in electrostatically actuated microelectromechanical oscillators // J. Sound Vibr. 2006. V. 296. P. 797–829. https://doi.org/10.1016/j.jsv.2006.03.009
Маслов Д.А. Влияние нелинейных свойств электростатических и электромагнитных датчиков управления на динамику цилиндрического резонатора волнового твердотельного гироскопа. Дисс. … канд. техн. наук. Москва, 2019. 127 с.
Маслов А.А., Маслов Д.А., Меркурьев И.В. Идентификация параметров волнового твердотельного гироскопа с учетом нелинейности колебаний резонатора // Приборы и системы. Управление, контроль, диагностика. 2014. № 5. С. 18–23.
Маслов А.А., Маслов Д.А., Меркурьев И.В. Способ определения параметров волнового твердотельного гироскопа // Патент RU 2544308 C9. 2015. Бюл. № 14.
Маслов Д.А. Идентификация параметров гироскопа с цилиндрическим резонатором при учете влияния нелинейности на амплитуду вынуждающего воздействия // Машиностроение и инженерное образование. 2017. № 1 (50). С. 24–31.
Maslov D.A., Merkuryev I.V. Increase in the Accuracy of the Parameters Identification for a Vibrating Ring Microgyroscope Operating in the Forced Oscillation Mode with Nonlinearity Taken into Account // Rus. J. Nonlin. Dyn. 2018. V. 14. № 3. P. 377–386. https://doi.org/10.20537/nd180308
Маслов А.А., Маслов Д.А., Меркурьев И.В., Подалков В.В. Разработка методов идентификации параметров нелинейной математической модели волнового твердотельного гироскопа // ХXVII Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. IEEE, 2020. С. 244–248. https://doi.org/10.23919/ICINS43215.2020.9133967
Журавлев В.Ф. Волновой твердотельный гироскоп: современное состояние, некоторые аспекты // Актуальные проблемы авиационных и аэрокосмических систем: процессы, модели, эксперимент. 2011. № 2 (33). Т. 16. С. 118–123.
Маслов Д.А., Меркурьев И.В. Компенсация погрешностей и учет нелинейности колебаний вибрационного кольцевого микрогироскопа в режиме датчика угловой скорости // Нелинейная динамика. 2017. Т. 13. № 2. С. 227–241. https://doi.org/10.20537/nd1702006
Лунин Б.С., Басараб М.А., Юрин А.В., Чуманкин Е.А. Цилиндрический резонатор из кварцевого стекла для недорогих вибрационных гироскопов // Сборник материалов юбилейной XXV Санкт-Петербургской международной конференции по интегрированным навигационным системам. IEEE, 2018. С. 204–207. https://doi.org/10.23919/ICINS.2018.8405896
Басараб М.А., Лунин Б.С., Матвеев В.А., Чуманкин Е.А. Балансировка полусферических резонаторов волновых твердотельных гироскопов методом химического травления // Гироскопия и навигация. 2015. № 1. С. 61–70. doi.org/10.1134/S2075108715030025
Маслов Д.А., Меркурьев И.В. Влияние нелинейных свойств электростатических датчиков управления на динамику цилиндрического резонатора волнового твердотельного гироскопа // Изв. РАН. МТТ. 2021. № 6. С. 88–110. https://doi.org/10.3103/S002565442106011X
Журавлев В.Ф., Климов Д.М. Прикладные методы в теории колебаний. М.: Наука, 1988. 328 с.
Ивченко Г.И., Медведев Ю.И. Введение в математическую статистику. М.: ЛКИ, 2010. 600 с.
Гавриленко А.Б., Меркурьев И.В., Подалков В.В., Сбытова Е.С. Динамика микромеханических систем. М.: Издательство МЭИ, 2016. 60 с.
Тимошенков С.П., Симонов Б.М., Бритков О.М., Анчутин С.А., Тимошенков А.С. Балансировка кремниевых датчиков угловой скорости в процессе изготовления // Изв. вузов. Электроника. 2015. Том 20. № 1. С. 58–67.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика твердого тела