

Российские нанотехнологии, 2022, T. 17, № 1, стр. 117-124
СВЯЗАННЫЕ БЕЗРЕАКТИВНЫЕ МЕМРИСТОРНЫЕ ГЕНЕРАТОРЫ ДЛЯ БИНАРНЫХ ОСЦИЛЛЯТОРНЫХ СЕТЕЙ
В. В. Ракитин 1, С. Г. Русаков 1, *, **
1 Институт проблем проектирования в микроэлектронике РАН
Зеленоград, Россия
* E-mail: rusakov@ippm.ru
** E-mail: vlarak@rambler.ru
Поступила в редакцию 16.06.2021
После доработки 29.07.2021
Принята к публикации 13.08.2021
Аннотация
Связанные безреактивные мемристорные генераторы (БМГ) рассмотрены в качестве элементов бинарных осцилляторных сетей. В таких системах информация представляется двоичными потоками и обеспечивается обмен двоичными сигналами между элементами. Обсуждаются принципы построения БМГ для бинарных осцилляторных сетей. Выполнен анализ работы простейших сетей на их основе. Приведены результаты моделирования взаимосвязанных БМГ.
ВВЕДЕНИЕ
Перспективным прибором, дополняющим современную интегральную элементную базу, является мемристор [1, 2], имеющий свойства аналоговой памяти и пригодный для разнообразных систем хранения и обработки информации, в том числе для построения нейронных сетей и нейроморфных вычислительных систем [3–6]. Благодаря свойству инерционности мемристоров обеспечивается возможность конструирования мемристорных генераторов различных типов [8, 9].
К настоящему времени описаны различные виды таких генераторов, в частности безреактивные мемристорные генераторы (БМГ) [10–12]. Отсутствие в них стандартных реактивных элементов (индуктивностей и емкостей) является важным преимуществом, что существенно, в первую очередь, при их включении в качестве компонентов интегральных схем.
Аналоговую память на мемристорах предполагается использовать в искусственных нейронах (ИН) и сетях на их основе [13–15], поскольку они удовлетворяют требованиям к межнейронным связям [16, 17]. Вместе с тем качества мемристоров позволяют строить на их основе и сами ИН. Являясь аналогами биологических нейронов, ИН должны иметь определенные свойства, в частности порог включения, возбуждение, торможение. Эти же свойства присущи простейшим релаксационным генераторам, которые традиционно выполняются на усилителях с положительной обратной связью или на приборах с отрицательным дифференциальным сопротивлением в сочетании с реактивными элементами. Подобные генераторы являются нелинейными динамическими системами первого порядка. Их состояние определяется одной переменной – фазой периодического процесса. Замена реактивного элемента мемристором упрощает переход к наноэлектронной реализации искусственных нейронов. Безреактивный мемристорный генератор, состоящий из мемристора и активного элемента, является простейшей моделью ИН. Он может быть заторможен или возбужден. В последнем случае его состояние описывается фазой периодического колебания.
Перспективными являются модели ИН на основе кусочно-постоянных генераторов [18, 19]. Они традиционно разрабатываются на стандартных электронных компонентах (усилителях, ключах, резисторах, конденсаторах) и представляют собой схемы, в которых переходные процессы протекают при постоянных воздействиях, например при заряде или разряде емкости постоянным током. В этом случае математическими моделями ИН являются системы обыкновенных дифференциальных уравнений с постоянными коэффициентами, а генерируемые сигналы – кусочно-линейными функциями времени. Простота таких схем упрощает анализ их поведения. При этом сохраняется многообразие их поведения и обеспечиваются присущие сложным моделям ИН свойства (возбуждение, торможение, формирование импульсов и импульсных пачек, условия генерации).
Нелинейность мемристора, обусловленная изменением его сопротивления при протекании через него тока, ограничивает построение кусочно-постоянных БМГ. Если использовать только изменение знака тока через мемристор, то ограничение, связанное с нелинейностью, снимается [20]. Для управления такими БМГ входной сигнал подается не на мемристор, а на активный элемент. В данном случае характер зависимости изменения сопротивления мемристора от протекающего тока не имеет существенного значения. Простейшие кусочно-постоянные БМГ содержат один мемристор. У такого генератора в автономном режиме изменение сопротивления мемристора во времени соответствует треугольным колебаниям, а выходной сигнал представляет собой стационарный поток двоичных импульсов.
Связанные безреактивные кусочно-постоянные БМГ являются предметом анализа в настоящей работе.
Взаимосвязанные БМГ обладают рядом полезных качеств. Внешнее воздействие может нарушить их синхронизацию. Время восстановления синхронизации зависит от силы воздействия. Благодаря этому взаимосвязанные БМГ выполняют модуляцию импульсных потоков и могут быть элементами осцилляторных нейронных сетей.
Осцилляторные нейронные сети (ОНС) [21] – нейронные сети, основными структурными единицами которых являются осцилляторы. ОНС на базе связанных осцилляторов рассматриваются как перспективное направление для решения ряда сложных вычислительных проблем, включая распознавание образов, обработку изображений и звуковых сигналов, управление роботами [22].
Использование бинарных генераторов с двоичными выходными сигналами [23] является перспективным вариантом построения ОНС в интегральном исполнении. Они имеют преимущество по сравнению с импульсными нейронными сетями, в которых используются короткие импульсы. Бинарные (двоичные) сигналы налагают меньшие требования на полосу пропускания из-за большей длительности импульсов и лучше согласуются со стандартной интегральной технологией на приборах с комплементарной структурой металл–оксид–полупроводник (КМОП). В бинарных осцилляторных сетях (БОС) обеспечивается обмен двоичными сигналами, а информация представляется двоичными потоками. Сети БМГ относятся к этому классу сетей. В [9, 24, 26] были представлены различные варианты БМГ, но их применение в составе осцилляторных сетей не обсуждалось.
Ниже рассмотрим БОС, состоящие из безреактивных мемристорных генераторов, связанных либо непосредственно, либо через логические элементы. В таком случае характер процессов в БМГ не изменяется и остается кусочно-линейным. Рассматриваемая БОС превращается в кусочно-постоянную динамическую систему, изменение переменных системы во времени носит кусочно-линейный характер. В этом случае скорости изменения переменных различаются только знаками. Изменения происходят во время наступления событий – переключений выходных сигналов БМГ, что делает поведение БОС хорошо предсказуемым.
В работе предложен принцип управления БМГ, обеспечивающий их синхронизацию в составе БОС. Он позволяет сочетать БМГ со стандартными двоичными логическими элементами, превращая БОС в аналогово-цифровую систему обработки информации.
ПРИНЦИП УПРАВЛЕНИЯ ПОРОГОВЫМИ ПАРАМЕТРАМИ В БЕЗРЕАКТИВНЫХ ГЕНЕРАТОРАХ НА МЕМРИСТОРАХ
Функциональная схема БМГ на основе биполярного мемристора приведена на рис. 1. Схема БМГ включает в себя двухпороговый компаратор (ДК) [20, 24] для обеспечения релаксационных колебаний. БМГ имеет один двоичный вход (in) и один двоичный выход (out). Дополнительные логические элементы обеспечивают объединение входных сигналов без нарушения условия постоянного тока через мемристор. Выход ДК подсоединен к мемристору М через управляемый генератор тока ${{I}_{M}}$. Введем также обозначение тока I. В этом случае ток ${{I}_{M}}$ принимает переменные значения $ \pm I$: ${{I}_{M}} = I{\text{sign}}({{V}_{{{\text{out}}}}})$. ДК включает в себя два компаратора, выходы которых объединены логической схемой NAND. На входы ДК поступают напряжение с мемристора $v$, сигнал $k{{V}_{{{\text{in}}}}}$, пропорциональный входному сигналу, опорные напряжения ${{V}_{m}}$ и ${{V}_{M}}$, задающие исходные минимальное и максимальное пороговые напряжения соответственно. Коэффициент пропорциональности $k$ определяет силу связи между соединенными БМГ.
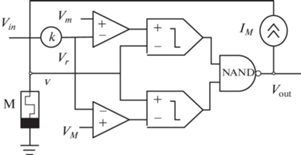
Состояние БМГ определяется величиной сопротивления мемристора $R(t)$ и логическим состоянием ДК ${{V}_{{{\text{out}}}}}$. При подключении мемристора анодом к генератору тока ${{I}_{M}}$ (рис. 1) имеет место соотношение $dR{\text{/}}dt = - \gamma {{I}_{M}}$, где γ определяет скорость переключения мемристора. В рамках дрейфово-диффузионной модели мемристора эта величина постоянна [2]. Перейдем к безразмерным переменным и безразмерному времени. Положив $I = 1$, $\gamma = 1$, в результате имеем $dR{\text{/}}dt = \pm 1.$
Изменение сопротивления мемристора $R$ ограничено физическими предельными значениями минимального ${{R}_{{{\text{on}}}}}$ и максимального ${{R}_{{{\text{off}}}}}$ сопротивлений. В безразмерных переменных ${{R}_{{{\text{off}}}}} = 1$, для реальных мемристоров это значение составляет до сотен килоом. Минимальное значение сопротивления ${{R}_{{{\text{on}}}}}$ в среднем на 2 порядка меньше максимального. Диапазон изменения $R$ дополнительно сужается в рассматриваемой схеме (рис. 1) при входном воздействии ${{V}_{{{\text{in}}}}}(t)$ из-за максимального ${{V}_{M}}$ и минимального ${{V}_{m}}$ пороговых напряжений ДК:
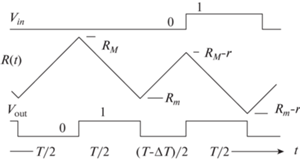
В результате реализации принципа управления пороговыми параметрами входной сигнал в схеме БМГ (рис. 1) не влияет непосредственно на изменение сопротивления мемристора. Он действует на пороги переключения, т.е. влияет на моменты переключения с переменой направления изменения сопротивления. Таким образом, изменения состояния и выходного сигнала БМГ определяются временем прихода управляющего сигнала. Это продемонстрировано на рис. 2, где показано действие входного сигнала ${{V}_{{{\text{in}}}}}$. При нулевом уровне входного сигнала БМГ сопротивление мемристора и выходной сигнал изменяются с периодом $T = 2({{R}_{M}} - {{R}_{m}}){\text{/}}(\gamma I)$. Под действием единичного входного сигнала пороги уменьшаются на величину $r = k{\text{/}}I$, что сокращает очередной полупериод колебаний (рис. 2).
СВОЙСТВА ВЗАИМОСВЯЗАННЫХ БМГ
БМГ можно использовать в качестве источника сигналов для другого принимающего БМГ. В этом случае передающий БМГ захватывает фазу принимающего БМГ. Действительно, при его выходном логическом сигнале “1” снижаются пороги принимающего БМГ. Если принимающий БМГ отстает по фазе, т.е. его положительный выходной сигнал запаздывает, то понизится максимальный порог, запаздывание сократится и отставание по фазе уменьшится. Если принимающий БМГ опережает по фазе, т.е. его положительный выходной сигнал генерируется с опережением, то понизится минимальный порог, время перехода на нижний (нулевой) уровень затянется и опережение сократится. Скорость синхронизации принимающего БМГ пропорциональна коэффициенту связи – величине r.
Применим следующие правила взаимодействия БМГ:
– во время действия высокого выходного уровня (логической “1”) передающего БМГ уменьшаются оба порога ДК приемного БМГ, после завершения действия высокого выходного уровня передающего БМГ пороги ДК приемного БМГ восстанавливаются до первоначальных значений. Низкий выходной уровень (логический “0”) передающего БМГ не влияет на пороги ДК приемного БМГ;
– изменения порогов достаточно малы для выполнения условия генерации принимающего БМГ;
– входной сигнал не влияет на величину тока, протекающего через мемристор.
При таких условиях каждый БМГ в сети находится в режиме генерации.
Поведение двух связанных БМГ в каждый момент времени описывается переменными ${{R}_{1}}$ и ${{R}_{2}}$ и знаками их производных $d{{R}_{1}}{\text{/}}dt$ и $d{{R}_{2}}{\text{/}}dt$. Их поведение рассматривается на фазовой плоскости (${{R}_{1}},{{R}_{2}}$), где траектории движения изображающей точки – отрезки прямых, параллельные или перпендикулярные главной диагонали квадрата (рис. 3). Таким образом, через каждую точку фазовой плоскости может проходить одна из четырех траекторий, определяемых знаками производной $dR{\text{/}}dt~$.
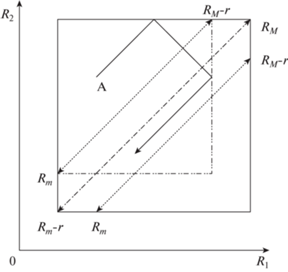
При достижении границ области, задаваемой пороговыми сопротивлениями, изменяется знак $dR{\text{/}}dt~$, траектория зеркально отражается от границы. В этот момент сами границы могут изменяться.
Область состояний связанных БМГ на фазовой плоскости – квадрат с вершинами $({{R}_{M}},~{{R}_{M}})$ и $({{R}_{m}} - r,~{{R}_{m}} - r)$, лежащими на главной диагонали, проходящей через эти точки. В нем имеется область стационарных траекторий периодического движения системы. Конкретная стационарная траектория характеризует состояние связанных БМГ с точностью до фазы. Область стационарных траекторий ограничена прямыми, параллельными главной диагонали. Они пересекают прямую, перпендикулярную главной диагонали и отстоящую от вершины на величину $r{\text{/}}\sqrt 2 $. На рис. 3 эта область ограничена пунктирными линиями. Сами устойчивые траектории – прямые, параллельные главной диагонали. Им соответствуют синхронные колебания. Траектории на главной диагонали соответствуют колебаниям БМГ1 и БМГ2 равной амплитуды.
Для попадания на стационарную траекторию необходимо и достаточно нахождения изображающей точки в области стационарных траекторий и одинаковых знаков производных. При начальных условиях, которые не удовлетворяют этим требованиям, траектории, достигая границ, отражаются. Отрезки траекторий движения изображающей точки при одинаковых знаках производных приближаются к области стационарных траекторий. Так, при исходном положении в точке А с положительными производными изображающая точка движется к верхней границе (рис. 3), отражается от нее и движется до новой границы (вертикальная линия на рис. 3, проходящая через точку ${{R}_{1}} = {{R}_{M}} - r$). После отражения от нее изображающая точка попадает на стационарную траекторию.
Обсуждаемые схемы БМГ могут рассматриваться как двоичные элементы с аналоговой памятью. У отдельного БМГ аналоговая память определяется его фазой по отношению к опорному сигналу той же частоты. В качестве опорного может быть использован БМГ без входных сигналов. Изменение состояния БМГ может проводиться по токовому входу, по входу на компаратор, а также прерыванием тока через мемристор. В этих случаях управляющий сигнал предполагается двоичным. Таким образом, сеть из БМГ является примером бинарной осцилляторной сети.
В составе БОС наряду с БМГ могут использоваться различные цифровые устройства для управления БМГ и анализа их поведения при внешних воздействиях. Двоичные сигналы с цифровых устройств могут встраиваться в цепи связи между БМГ при помощи логических элементов. Фактически БОС становится аналогово-цифровым вычислительным устройством на основе множества связанных динамических систем.
ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ БИНАРНЫХ ОСЦИЛЛЯТОРНЫХ СЕТЕЙ НА БМГ
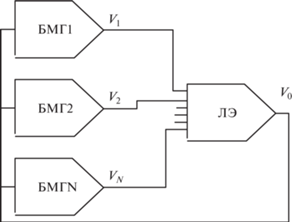
К простым архитектурам бинарных осцилляторных сетей на БМГ следует отнести архитектуры кольцевого типа и звездообразного [25]. Здесь ограничимся обсуждением БОС звездообразной архитектуры. Рассмотрим БОС, состоящую из N БМГ, соединенных логическими элементами (ЛЭ). В общем случае у каждого из БМГ бинарной осцилляторной сети свой тип логического элемента c N максимально возможным количеством входов. Эти ЛЭ могут перестраиваться сигналом внешнего управления. В качестве ЛЭ могут быть выбраны, например, пороговые элементы с перестраиваемым порогом.
Звездообразные БОС. В звездообразных БОС связь БМГ обеспечивается соединением типа звезды через логический элемент (рис. 4).
Ограничимся рассмотрением простейших двухэлементных звездообразных сетей с двумя типами ЛЭ: OR и AND. Присвоим соответственно этим БОС обозначения (2-OR/r)БОС и (2-AND/r)БОС, где r – коэффициент связи сети. Будем считать, что в составе БОС присутствует фазовый детектор (XOR).
Область стационарных траекторий имеет П-образную форму вдоль главной диагонали, обращенную перемычкой вниз – OR (рис. 5а) и вверх – AND (рис. 5б). Основному стационарному состоянию соответствует траектория движения изображающей точки по диагонали.
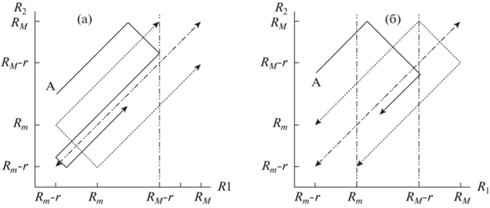
П-образность траекторий обусловлена присутствием ЛЭ: его выход может не изменяться при изменении его входных сигналов. В схеме (2-OR/r)БОС при достижении нижнего порога из двух единичных входных сигналов переходит в ноль только один. Поэтому выход ЛЭ остается единичным, а пороги сниженными (рис. 5а). Система продолжает движение до достижения второго нижнего порога. При достижении верхнего порога из двух нулевых входных сигналов один переходит в единицу, что снижает второй верхний порог, второй сигнал тоже становится единичным. Таким образом происходит смена направления движения по той же траектории. П-образность траекторий приводит к различию амплитуд чередующихся колебаний и различию фаз БМГ1 и БМГ2. Если изображающая точка в некоторый момент времени не находится на стационарной траектории (точка А на рис. 5), то она переходит на нее после нескольких перемен направления движения, как и в случае взаимосвязанных БМГ.
Ситуация усложняется, если допустить в БОС инвертирование логических сигналов. Пример возможной траектории движения приведен на рис. 6. Пусть первоначально система установлена в точке 1 с координатами ${{R}_{1}}(0) = {{R}_{2}}(0) = {{R}_{m}} - r$, а знаки производных $dR(0){\text{/}}dt$ одинаковы. Ее траектория движения ограничена пределами ${{R}_{m}} - r$ и ${{R}_{M}} - r$ вдоль оси ${{R}_{2}}$, пределами ${{R}_{m}} - r$ и ${{R}_{M}}$ по оси ${{R}_{1}}$. Верхний предел в этом случае зависит от ЛЭ. В результате из точки 1 система переходит в точку 2 и т.д. до точки 11, а точка 12 совпадает с точкой 1. Таким образом система генерирует сложную траекторию с периодом, равным величине $\frac{{6({{R}_{M}} - {{R}_{m}})}}{{\gamma I}} - \frac{{2r}}{\gamma }$. При других начальных условиях траектория может быть еще более сложной.
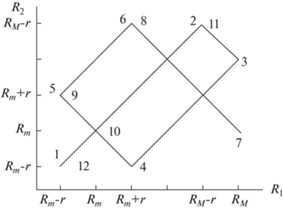
Таким образом, введение в состав БОС логических элементов позволяет в автономном режиме получать сложные траектории кусочно-линейных колебаний величин сопротивлений и двоичные последовательности на выходе компараторов и ЛЭ со сложной модуляцией импульсов по длительности.
МОДЕЛИРОВАНИЕ ОСЦИЛЛЯТОРНЫХ СЕТЕЙ НА БИНАРНЫХ ГЕНЕРАТОРАХ
Моделирование подтвердило характер поведения простейших рассматриваемых бинарных осцилляторных сетей на БМГ, а также устойчивость такого поведения к разбросу параметров мемристоров.
При моделировании вариантов бинарных осцилляторных сетей на БМГ использованы безразмерные параметры переменных: ${{R}_{M}} = 0.8$, ${{R}_{m}} = 0.4$. Пример перехода звездообразной БОС (r = 0.05) с логическим элементом OR (2-OR/0.05)БОС к стационарному состоянию приведен на рис. 7.
Рис. 7.
Переходной процесс установления стационарного состояния в БОС (БМГ1 – штриховая линия, БМГ2 – пунктирная, OR – сплошная жирная, рассогласование (XOR) – сплошная).
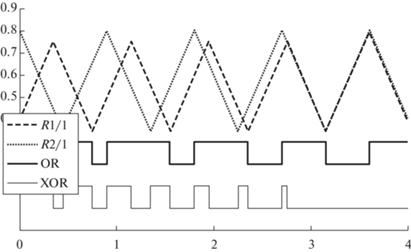
Первоначально БМГ1 и БМГ2 установлены в различные состояния (${{R}_{1}}(0) = 0.4~,~{{R}_{2}}(0) = 0.8$). Далее за четыре периода генераторы переходят к основному стационарному состоянию ${{R}_{1}}(t) = {{R}_{2}}(t)$ – движению по главной диагонали на фазовой плоскости (рис. 6). В этом состоянии выходы БМГ1 и БМГ2 идентичны, что соответствует логическому “0” функции XOR (нижняя кривая на рис. 7). При ${{R}_{2}}(0) = 0.7,~~0.6,~~0.5~~$ переход происходит за 3, 2 и 1 период соответственно. В обсуждаемых случаях разница в начальных состояниях кратна удвоенному коэффициенту связи, чем обеспечивается полная синхронность колебаний (сдвиг фаз равен нулю). На фазовой плоскости это соответствует движению изображающей точки по главной диагонали.
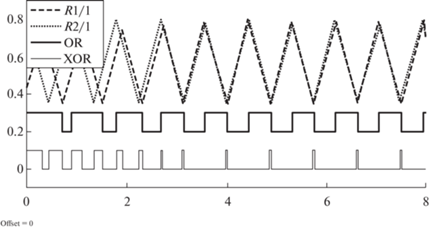
При некратных значениях, например при ${{R}_{1}}(0) = 0.43\,\,{\text{и}}\,~{{R}_{2}}(0) = 0.8$, происходит переход в состояние с П-образной траекторией. В этом случае колебания БМГ1 и БМГ2 синфазны со сдвигом (рис. 8). Как видно из рисунка, после четырех периодов устанавливается режим стационарных колебаний. На выходе ЛЭ наблюдаются периодические импульсы, а фазовый детектор (XOR) формирует короткие импульсы рассогласования.
Рис. 8.
Временная диаграмма для звездообразной БОС (r = 0.05) с логическим элементом (2-OR/0.05) БОС и начальными условиями R1(0) = 0.43, R2(0) = 0.8.
Таким образом, звездообразные бинарные осцилляторные сети на основе БМГ имеют широкие функциональные возможности при наличии всего одного логического элемента. Такие возможности делают их перспективными для ряда нейроморфных применений, включая осцилляторные резервуарные вычисления, стохастические генераторы, нейронные сети с вероятностным кодированием.
ЗАКЛЮЧЕНИЕ
Осцилляторные сети на основе бинарных безреактивных мемристорных генераторов обладают широким набором функциональных свойств, а также возможностями изготовления по современным интегральным полупроводниковым технологиям. Такие системы сочетают достоинства мемристоров с возможностями КМОП-схемотехники, обеспечивающей управление аналоговой памятью, мультиплексирование системы с использованием мемристорных кроссбаров и организацию интерфейса с внешней средой. К достоинствам такого сочетания следует отнести энергонезависимость мемристоров в составе кроссбаров и низкое потребление КМОП-элементов.
Предложенные варианты БМГ удовлетворяют требованиям, предъявляемым в связи с применением в БОС, благодаря введенному подходу управления пороговыми параметрами БМГ.
Рассмотренные варианты сетей БМГ имеют различные режимы поведения, включая стационарные и возбужденные состояния, допускают синхронные и асинхронные колебания, характеризуются длительными переходными процессами между стационарным и возбужденным состояниями в зависимости от степени связи, а также формированием пакетов импульсов, количество которых зависит от степени возбуждения. Такие функциональные возможности позволяют выполнять аналогово-цифровые преобразования даже на простых взаимосвязанных БМГ.
Перечисленные свойства открывают возможности построения БОС для решения широкого круга задач, в том числе для моделирования искусственных нейронов и сетей на их основе.
Исследование выполнено при финансовой поддержке Российского фонда фундаментальных исследований (проект № 19-29-03012 мк).
Список литературы
Chua L.O. // IEEE Trans. Circuit Theory. 1971. V. 18. № 9. P. 507.
Strukov D.B., Snider G.S., Stewart D.R. // Nature (London, U.K.). 2008. V. 453. P. 80. https://doi.org/10.1038/nature06932
Jo S.H., Chang T., Ebong I. et al. // Nano Lett. 2010. V. 10. № 4. P. 1297.
Sung C., Hwang H., Yoo I.K. // J. Appl. Phys. 2018. V. 124. P. 151903. https://doi.org/10.1063/1.5037835
James A. Memristor and Memristive Neural Networks. London: IntechOpen, 2018. 324 p. https://doi.org/10.5772/66539
Антонов И.Н., Белов А.И., Михайлов А.Н. и др. // Радиотехника и электроника. 2018. Т. 63. № 8. С. 880.
Демин В.А., Емельянов А.В., Лапкин Д.А. и др. // Кристаллография. 2016. Т. 61. № 6. С. 958.
Itoh M., Chua L.O. // Int. J. Bifurcation Chaos. 2008. V. 18. № 11. P. 3183. https://doi.org/10.1142/S0218127408022354
Radwan A.G., Fouda M.E. On the Mathematical Modeling of Memristor, Memcapacitor, and Meminductor. Cham: Springer Internatiol Publishing, 2015. 231 p. https://doi.org/10.1007/978-3-319-17491-4
Zidan M., Omran H., Smith C. et al. // Int. J. Circ. Theor. Appl. 2014. V. 42. № 11. P. 1103. https://doi.org/10.1002/cta.1908
Kyriakides E., Georgiou J. // Int. J. Circ. Theor. Appl. 2015. V. 43. P. 1801.
Rakitin V., Rusakov S. // J. Commun. Technol. El. 2017. V. 62. № 6. P. 621.
Datta S. // Proc. IEEE 2019. V. 107. P. 73.
Csaba G., Porod W. // arXiv:1805.09056v1 [cs.ET]. 2018.
Wang Y., Wang G., Shen Y., Iu H. // Circuits, Syst. Signal Process. 2020. V. 39. P. 3496.
Chua L.O., Kim H., Sah M. et al. // Proc. IEEE. 2011. V. 100. № 6. P. 2061.
Secco J., Poggio M., Corinto F. // Int. J. Circ. Theor. Appl. 2018. V. 46. № 1. P. 1.
Tsubone T., Saito T. // IEICE Trans. Fundamentals. 1999. № 8. P. 1619.
Yamashita Y., Torikai H. // IEEE Transactions On Circuits And Systems II: Express Briefs. 2014. V. 61. № 1. P. 54.
Rakitin V.V., Rusakov S.G. // 2020 IEEE East-West Design & Test Symposium (EWDTS) Proceedings Varna, Bulgaria, P. 269.
Борисюк Г.Н., Борисюк Р.М., Казанович Я.Б. и др. // Математические результаты и приложения. Матем. моделирование. 1992. Т. 4. № 1. С. 3.
Burr G., Shelby R., Sebastian A. et al. //Adv. Physics: X. 2016. V. 2. № 1. P. 89.
Wang W. // Neural Comput. 1996. № 8. P. 319.
Ракитин В.В., Русаков С.Г. // Наноиндустрия. 2020. Т. 13. № S5-3 (102). С. 752.
Rakitin V.V., Rusakov S.G. // Memristors / Eds. Chang Y.F. London. IntechOpen, 2021. P. 317. https://doi.org/10.5772/intechopen.97808
Ракитин В.В., Русаков С.Г. // Проблемы разработки перспективных микро- и наноэлектронных систем (МЭС). 2016. Вып. 1. С. 79.
Дополнительные материалы отсутствуют.
Инструменты
Российские нанотехнологии