

Российские нанотехнологии, 2023, T. 18, № 2, стр. 186-206
Электрочувствительные материалы для мягкой робототехники
Н. М. Кузнецов 1, *, Е. П. Банин 1, А. Е. Крупнин 1, 2, С. В. Крашенинников 1, И. А. Чичаев 1, А. В. Коротеев 3, Т. Е. Григорьев 1, 4, С. Н. Чвалун 1, 5
1 Национальный исследовательский центр “Курчатовский институт”
Москва, Россия
2 Московский государственный технический университет им. Н.Э. Баумана
Москва, Россия
3 Первый Московский государственный медицинский университет им. И.М. Сеченова Минздрава России
(Сеченовский Университет)
Москва, Россия
4 Московский физико-технический институт (национальный исследовательский университет)
Долгопрудный, Россия
5 Институт синтетических полимерных материалов им. Н.С. Ениколопова РАН
Москва, Россия
* E-mail: kyz993@yandex.ru
Поступила в редакцию 11.01.2023
После доработки 11.01.2023
Принята к публикации 18.01.2023
Аннотация
В обзоре рассмотрены основные подходы к созданию конструктивных и активных элементов для актуаторов мягкой робототехники. Проведен анализ литературы в области последних достижений электрочувствительных полимерных материалов, функционирующих на принципах давления Максвелла и электрострикции. Отмечена основная проблематика разработки двигательных элементов для мягкой робототехники в части проектирования и расчета актуаторов, способов активации двигательной функции. Также рассмотрены вопросы, связанные с разработкой перспективных материалов для мягкой робототехники и способами их получения. Внимание уделено комплексному подходу и современным методам исследования материалов, в том числе с использованием установок класса “мегасайенс” (MegaScience). Изложены современные способы моделирования и проектирования роботехнических элементов, представлен анализ подходов к производству как конструктивных, так и активных элементов мягкой робототехники. Рассмотрены актуальные аналитические и численные методы, которые позволяют получать релевантные модели свойств материалов для описания механического поведения актуаторов для мягкой робототехники. Представлен обзор функциональных прототипов мягких роботов, спроектированных по принципу природоподобия, с активными элементами из электрочувствительных полимерных материалов.
ОГЛАВЛЕНИЕ
Введение
1. Электрочувствительные полимерные материалы
1.1. Давление Максвелла
1.2. Электрострикция
2. Роль инженерного проектирования при создании мягкого робота
2.1. Аддитивные технологии
2.2. Применение численных методов при разработке мягких роботов
3. Применение электрочувствительных материалов для робототехнических устройств
Заключение
ВВЕДЕНИЕ
Многообразие биологического и животного мира, его совершенство и невероятная многофункциональность привели к появлению природоподобных технологий [1–3], которые должны воссоздавать процессы живой природы при получении новых материалов и устройств. Парадигма природоподобия находит отражение в различных научных и социальных сферах, таких как “зеленая” химия [4], энергетика [5, 6], биотехнология [7, 8], медицина [9, 10], современные нанокомпозиты [11, 12], информационные технологии (нейросети) [13].
Одним из ярких примеров природоподобия является мягкая робототехника – раздел, связанный с конструированием робототехнических систем из мягких материалов, что обеспечивает гибкость и адаптируемость при выполнении задач [14]. Существенным преимуществом мягких роботов по сравнению с жесткими аналогами является бо́льшая безопасность при взаимодействии с человеком. Основным направлением развития мягкой робототехники является решение специальных задач в медицине при малоинвазивной хирургии и постоперационной реабилитации пациентов, для биомимикрии в исследованиях океана или в космосе с целью сбора научной информации, а также для разведывательных и военных целей. Многие из указанных применений связаны с функционированием робота в нестандартных условиях окружающей среды, что требует формулировки и решения уникальных проблем механики, поиска и создания новых материалов. Фундаментальной особенностью таких роботов является большее число степеней свободы (в идеале бесконечное, как в реально существующих живых системах) по сравнению с шестью (три вращательные и три поступательные) в классической жесткой робототехнике [15].
Основными компонентами мягкого робота являются источник питания, элементы движения и взаимодействия с окружающим миром, системы маскировки и защиты от внешних воздействий, а также контроля, управления и обратной связи [16]. В настоящее время разработаны подходы к реализации всех перечисленных элементов. Детальное описание соответствующих принципов рассмотрено в нескольких обзорах [15, 17, 18] и не является целью настоящей работы. Таким образом, создание полностью автономного, биоподобного мягкого робота является предметом обозримого будущего. Однако на практике исследователи столкнулись с рядом экспериментальных и инженерных трудностей, что повлекло за собой интенсивные научные исследования в материаловедении.
Приводы являются ключевыми компонентами для движения и управления любыми механическими системами. Однако материалы, обычно применяемые в робототехнике (металлы, полимеры, композиты), имеют значения модуля упругости на 2–3 порядка выше, чем ткани живых организмов (кожа, мышечная ткань, связки и сухожилия) [19]. Поэтому актуальной задачей является разработка новых материалов, действующих на других принципах, с характеристиками (в том числе механическими), сопоставимыми с биологическими объектами, особенно в отношении движения, безопасности и энергоэффективности разрабатываемых устройств. Движение и взаимодействие мягкого робота с окружающей средой могут осуществляться за счет нескольких принципов: использования материалов с памятью формы, применения пневмо- или гидравлических систем, электрострикции, фазового перехода, а также реактивного движения, вызванного протеканием “взрывных” химических реакций [17, 19, 20]. Наиболее перспективными и активно развиваемыми подходами, по-видимому, являются пневмосистемы и электроактивные полимерные материалы. Недостатком пневмосистем является необходимость использования зачастую громоздкого вспомогательного оборудования, например, компрессора, для создания давления и заполнения каналов в конструкционных элементах из полимерного материала. Реализация такого подхода к движению и взаимодействию мягкого робота с окружающей средой затруднена и практически невозможна при выполнении глубоководных задач в океане или далеком космосе. Последние десятилетия большое внимание привлекают “умные” или стимул-чувствительные материалы, способные изменять свои свойства при внешнем воздействии [21]. К таким материалам относятся полимерные гели, пленки и волокна, изменяющие свою форму при приложении электрического поля – электрострикционные, пьезоэлектрические, проводящие материалы и др. Тем не менее, несмотря на активное развитие “умного” материаловедения для мягкой робототехники, пока не существует серийного производства мягких роботов, и ведутся исследования по созданию новых электрочувствительных материалов с последующим проектированием конструкционных элементов мягких роботов на их основе. Обзор посвящен обобщению свойств современных электрочувствительных материалов и анализу перспективных подходов к созданию актуаторов мягкой робототехники.
1. ЭЛЕКТРОЧУВСТВИТЕЛЬНЫЕ ПОЛИМЕРНЫЕ МАТЕРИАЛЫ
Электрочувствительные полимерные материалы, которые применяют для создания актуаторов мягких роботов, включают в себя диэлектрические [22], электрострикционные [23], жидкокристаллические полимеры [24], ионные полимеры и композиты [25], электрореологические жидкости [26] и стимул-чувствительные гели [27]. Каждый из этих типов материалов является отдельной областью материаловедения, достойной специального рассмотрения, однако в рамках представленного обзора остановимся на основных принципах и последних достижениях только в двух из указанных областей: диэлектрических и электрострикционных полимерных материалах.
1.1. Диэлектрические эластомеры. Давление Максвелла
К диэлектрическим эластомерным материалам обычно относят кремнийорганические (силиконы), полиуретановые и полиакриловые каучуки, способные к большим обратимым деформациям [28]. Принцип действия таких материалов основан на давлении Максвелла, возникающем между противоположно заряженными электродами, приложенными к полимерной пленке, за счет электростатической силы [29]. Под действием этого давления эластомер сжимается в аксиальном направлении и расширяется в радиальном (рис. 1):
Рис. 1.
Принцип действия давления Максвелла. При приложении электрического поля к диэлектрическому эластомеру возникает давление, приводящее к аксиальному сжатию и радиальному расширению.

Одной из важных научных задач при разработке искусственных мышц на основе диэлектрических эластомеров можно считать переход к малым напряжениям срабатывания (менее 1 кВ) [30–32], что позволит увеличить безопасность устройств на основе подобных искусственных мышц и заменить дорогостоящее высоковольтное оборудование на более дешевое. В настоящее время такие попытки осуществляются в нескольких направлениях. Например, за счет увеличения диэлектрической постоянной [33, 34], снижения модуля упругости [35], уменьшения толщины пленок [31, 36–38]. При этом еще одной важной задачей при создании актуатора на основе диэлектрических эластомеров является нанесение гибкого электродного слоя. В качестве материалов для электродов используют пленки и покрытия с проводящими добавками на основе углеродных или металлических частиц: сажи [39], графита и его производных [40], углеродных нанотрубок [41], серебряных порошков [42] и др. Основными проблемами становятся плохая адгезия проводящего слоя к эластомеру и разрушение перколяционной сетки частиц в процессе эксплуатации, что приводит к потере проводимости [43]. В качестве путей решения предлагается нанесение электродного слоя на предварительно деформированные мембраны, а также применение в качестве наполнителей частиц с высоким характеристическим отношением, что позволяет сохранить перколяционную сетку при деформации материала. На примере отдельных исследований более детально рассмотрим существующие подходы к созданию диэлектрических эластомерных материалов и повышению их эффективности.
В [44] рассмотрен метод получения анизотропных диэлектрических эластомерных пленок из аморфного триблок-сополимера поли(стирол-б-бутилакрилат-б-стирол) (Mn = 150 кДа, 20 мас. % полистирола состава ПС145-б-ПБА940-б-ПС145). Сополимер был получен методом RAFT-полимеризации с обратимой передачей цепи. Пленки получали поливом из раствора тетрагидрофурана (10 мас. %) с последующим одноосным растяжением в 2, 4 и 6 раз и отжигом при 120°C в течение 8 ч. Температура отжига выбрана выше температуры стеклования полистирольных блоков (100°C), однако ниже перехода “порядок–беспорядок” для данного сополимера (200°C). При охлаждении пленок до комнатной температуры наблюдали усадку на 10–20%. Микрофазное разделение при формовании тонких пленок приводит к появлению полистирольных доменов, выполняющих роль физических сшивок (рис. 2а). Предел прочности и модуль Юнга материала возрастают в направлении вытяжки в зависимости от кратности вытяжки от 3.0 до 12.8 и от 0.3 до 2.9 МПа соответственно при сохранении исходных механических характеристик в перпендикулярном направлении (рис. 2в, 2г). Обычно повышение механических свойств связано с изменением конформации полимерных цепей при вытяжке и появлением ориентации, что часто наблюдается в пластических материалах. Для эластомеров растянутая конформация полимерных цепей не может быть легко зафиксирована, поэтому в рассматриваемом случае усиливающий эффект в направлении вытяжки связан с изменением морфологии и ориентации полистирольных доменов. В качестве электродов при исследовании отклика пленок на электрический стимул использовали покрытие из однослойных углеродных нанотрубок. Анизотропия механических характеристик предварительно растянутых пленок приводит к более существенным деформациям пленки в электрическом поле в направлении, перпендикулярном вытяжке (рис. 2д). На основе полученных материалов был разработан мягкий захват с высокой маневренностью при напряжении срабатывания в субкиловольтном диапазоне (~800 В) (рис. 2е–2з), что является существенным прогрессом в повышении безопасности функционирования эластомерных актуаторов.
Рис. 2.
Процесс изготовления анизотропных пленок ПС145-б-ПБА940-б-ПС145: схематичная иллюстрация одноосного растяжения и температурный отжиг для получения пленок с ориентированными ПС-доменами (а). Схема изготовления многослойного композиционного материала из предварительно растянутых пленок (10 активных слоев, один слой клея и один пассивный слой, ширина – 6 мм, длина – 21 мм) (б). Механические испытания пленок в различных направлениях в зависимости от степени предварительного растяжения (L/l = 2, 4 и 6) (в, г). Направление деформации параллельно (D∥S) (в) или перпендикулярно (D⊥S) (г) ориентации ПС-доменов (направлению вытяжки). Угол и кривизна изгиба актуаторов на основе исходных и одноосно-вытянутых пленок (толщина каждого слоя 22 мкм, L/l = 4) при различных управляющих напряжениях (д). Различные режимы деформации, достигнутые для актуаторов за счет различной ориентации ПС-доменов: перпендикулярно, под углом 45° и параллельно длине актуатора (е–з). Адаптировано из [44] с разрешения Royal Society of Chemistry.

В [36] предложены электрочувствительные материалы, активные и при меньших значениях потенциала. Упругий элемент в виде плоской мембраны из полидиметилсилоксана (ПДМС) формовали на подложке из полиэтилентерефталата со слоем полиакриловой кислоты, который в последствии удаляли. В качестве электродов до удаления слоя полиакриловой кислоты на эластомерную пленку наносили слой на основе ПДМС, наполненного сажей. В качестве изолятора и рамки использовали кольцо из полиметилметакрилата (ПММА). При существенном уменьшении толщины мембраны до 3 мкм деформация в радиальном направлении составила 7.5% при величине электрического потенциала 245 В. Отметим, что в случае мембран наиболее рационально уменьшать именно толщину (обратная квадратичная зависимость), так как из соотношений теории упругости известно, что
Отсутствие мягких эластомеров с высокой диэлектрической проницаемостью, реагирующих на низкое напряжение, долгое время было препятствием для создания линейных актуаторов. В [33] получены и охарактеризованы эластомеры, обладающие не только высокой диэлектрической проницаемостью, но и хорошими упругими и изоляционными свойствами. К преимуществам рассматриваемых материалов также относятся низкая стоимость и простота формования в тонкие пленки (24 и 35 мкм). При использовании эластомеров на основе полисилоксанов с полярными нитрильными группами и винильными группами из полиметилвинилсилоксана и 2,2'-(этилендиокси)диэтантиола (CL2) и пентаэритрита тетракис(3-меркаптопропионата) (CL4) в виде мембран, сформованных на подложке из поливинилхлорида (ПВХ), удалось добиться стабильной деформации мембран в радиальном направлении до 13% при напряженности поля 13 кВ/мм для материала с модулем упругости 350 кПа, tan δ = 0.007 при частоте 0.05 Гц. Также были представлены результаты для более жесткого материала с модулем упругости 790 кПа со стабильной деформацией мембраны в радиальном направлении до 10% при напряженности поля до 41 кВ/мм. На основе полученных материалов разработан актуатор с заметным откликом при малых напряжениях ниже 200 В.
Другим подходом к усилению эффекта Максвелла в диэлектрических эластомерах является получение композиционных материалов. Например, в [35] исследованы материалы для искусственных мышц на основе γ-метакрилоксипропилтриметоксисилана (коммерческое наименование KH570) и композиты, содержащие в качестве модификатора до 50 мас. % частиц титаната бария, который является одновременно прекурсором при вулканизации. В качестве образца для испытаний использовали круглую мембрану. Пленки с различным количеством сшивающего агента – гидрированного ксилилендиизоцианата (TAKENATE 600) – получали прессованием под давлением 15 МПа с последующей вулканизацией при температуре 140°С в течение 5 ч в вакууме. В качестве электродов на поверхность был нанесен графитовый порошок в силиконовом масле. В результате за счет введения наполнителя удалось добиться высоких значений диэлектрической постоянной материала при сохранении невысоких значений модуля упругости. Больших деформаций материала (до 26%) удалось добиться при содержании наполнителя 10 мас. % и напряженности электрического поля 12 кВ/мм. Было показано, что все композиционные материалы более чувствительны к внешнему стимулу по сравнению с коммерческим диэлектрическим эластомером VHB4910 (3M, акриловая резина) для конического исполнения актуатора при сопоставимой напряженности электрического поля. Образцы с большей массовой долей титаната бария (30 и 50 мас. %) демонстрировали деформацию до 10% при напряженности электрического поля до 17 кВ/мм. Однако диапазон рабочих потенциалов для композиционных материалов снижается по сравнению с коммерческими ненаполненными аналогами. Большой акцент в работе сделан на попытке уменьшить модуль упругости материала для искусственной мышцы. Модуль упругости эластомерной матрицы сложно эффективно уменьшить только за счет повышения массовой доли пластификатора: ухудшается стабильность отклика. Тем не менее некоторые исследования в этом направлении ведутся. Например, добавление 0.01 мас. % диметилсилоксанового масла к композиту с диоксидом титана позволяет получить однородный состав на молекулярном уровне и значительно снизить модуль упругости диэлектрических эластомерных композитов с 820 до 95 кПа [45].
Последние научные исследования посвящены изучению долговечности работы актуаторов на основе диэлектрических эластомеров при циклическом нагружении. Так, в [46] разработан диэлектрический эластомер на основе цианоэтилцеллюлозы, введенной в качестве добавки в гель ПВХ. Такой состав был подобран для увеличения проводимости конечного изделия и уменьшения вязкоупругих эффектов (уменьшение механических потерь энергии по тангенсу потерь tan δ). В качестве референсных свойств были использованы характеристики коммерческого акрилового эластомера (3M VHB). Экспериментальный образец представлял собой тонкую мембрану. В стендовых испытаниях актуатор демонстрирует деформации ~12% при напряженности поля до 9 кВ/мм, а вязкоупругий эффект дрейфа свойств при частоте 1 Гц составил только 3.5% на протяжении 1000 циклов по сравнению с 232% за 500 циклов для актуатора из 3M VHB. Важно, что возвратное усилие в образце достигало 300 г, т.е. мембрана после снятия напряжения способна вернуть свое первоначальное состояние с грузом указанной массы.
Сохранение электропроводности материала при циклических деформациях было достигнуто для нетканого полимерного мата [47]. Композиционную мембрану изготавливали методом электроформования из сополимера поли(стирол-б-бутадиен-б-стирол) (Mn = 142 кДа, 28.4 мас. % полистирола, что соответствует составу ПС195-б-ПБ1880-б-ПС195). Проводимость повышали путем пропитывания нетканого материала в растворе серебросодержащего прекурсора (раствор трифторацетата серебра в спирте) с последующим восстановлением наночастиц in situ раствором гидразина, что приводит к появлению перколяционной сетки как на поверхности, так и внутри полимерных волокон. Содержание серебра в конечном материале составило 62 мас. %. Важно отметить, что полистирольные блоки не образуют в данном случае микродоменов из-за быстрого испарения растворителя при формовании: формирование волокна происходит до самоорганизации полимерных цепей. Нагревание материала до 150°С приводит к повышению подвижности полимерных цепей и разделению фаз, при этом наночастицы серебра из объема волокна мигрируют на поверхность, и электропроводность материала существенно снижается при деформации в 30%. Несмотря на то что проводимость при деформировании матов изменялась в широком диапазоне от 5500 до 71 См/см при деформациях от 20 до 140% и изменении толщины образцов от 150 до 30 мкм, удалось добиться устойчивого значения проводимости при циклических испытаниях мембраны на растяжение. Количество циклов достигало 300 для всех уровней деформации, а проводимость оставалась практически постоянной. В работе также был представлен подход по нанесению проводящего слоя на мембрану методом распыления на маску.
Перспективы использования серебряных нановолокон в качестве проводящего слоя продемонстрированы в [48]. Был получен двухслойный композит в форме сетки на подложке ПДМС: :слой смеси поли(стирол-б-бутадиен-б-стирол)а c серебряными нановолокнами выполняет роль электрода, а внешний слой сополимера является изолятором. Изменение рисунка сетки позволяет регулировать ее механические характеристики, а формование доменной структуры проводящих и непроводящих фрагментов позволило создать имплантат, поддерживающий сократительную функцию сердца и стимулируемый электрическим импульсом. Несмотря на то что в последних двух исследованиях изменение механических характеристик материалов под действием электрического поля не изучено, рассмотренные работы содержат крайне важные результаты и показывают стабильность свойств эластомерных материалов при циклическом функционировании, а также принципиальную возможность регулирования свойств конечного изделия путем изменения состава и топологии элементов.
Очевидно, что структура композиционных эластомерных материалов имеет решающее значение при формовании изделия с повышенной электроактивностью, поэтому структурные исследования становятся принципиально необходимыми для создания таких материалов и понимания физико-химических основ их функционирования. Перспективным инструментом для изучения структуры композиционных диэлектрических эластомеров, в том числе под действием внешнего стимула, являются in situ-исследования малоуглового рентгеновского рассеяния (МУРР). Ранее под действием электрического стимула было изучено изменение структуры термопластичных эластомерных гелей блок-сополимера поли(стирол-б-этилен-бутилен-б-стирол) (Kraton G1650, Mw = 110 кДа, 29.2 мас. % полистирола, что соответствует составу ПС155-б-ПЭБ930-б-ПС155) или его функционального сополимера с эфиром малеинового ангидрида (Kraton FG1901X, ПС160-б-(ПЭБ-g-МА)900-б-ПС160), содержание ангидрида составляет 1 мас. % [49]. Содержание полимера в геле составляло 20–40 мас. %. В качестве пластификатора использовали белое минеральное масло. Эти коммерчески доступные сополимеры обладают очень узким молекулярно-массовым распределением (индекс полидисперсности <1.05). Структура получаемых на их основе гелей зависит от температуры формования: при температуре, близкой к комнатной, гель имеет выраженную структуру разупорядоченной мицеллярной сетки, если гель получен при нагревании и одноосном растяжении (прессование при температуре выше 100°C), он обладает объемно-центрированной кубической структурой. Наличие упорядоченной структуры делает такие гели удобным объектом для рентгеноструктурных исследований. Известно, что при растяжении термоэластопластов наблюдается соответствие деформации на микроуровне макродеформациям образца. При приложении электрического поля к образцу происходит его утонение и увеличение продольных размеров за счет давления Максвелла. Изменение положения рефлексов МУРР под действием поля свидетельствует о деформации структуры. Результаты показали, что независимо от направления деформирования и степени ориентации мицелл в структуре при приложении электрического поля в образцах наблюдается радиально-изотропное расширение. Изменение расстояния между доменами существенно зависит от концентрации полимера в геле, что позволило выявить зависимость деформаций от состава и регулировать свойства получаемых материалов. Отмечалось и то, что получаемые величины деформации из данных МУРР являются наиболее близкими к истинным, поскольку исключают поступательное движение, а также изгиб, который приводит к переоценке значения при использовании классического метода лазерного зондирования.
За последние годы в области разработки новых диэлектрических эластомеров для использования в качестве актуаторов существенных прорывов не произошло [50–53]. Несмотря на это, публикационная активность в данном направлении очень высокая. В настоящее время обеспечить перемещение при достаточно большой нагрузке только лишь с использованием диэлектрических эластомеров невозможно, поэтому в литературе часто встречаются варианты гибридных актуаторов, которые, в том числе, используют классический эффект давления Максвелла. В [54] рассматривается гибридный актуатор с диэлектрическим эластомером и пневматической системой. Конструкция представляет собой воздушную псевдопружину, между двумя мембранами из диэлектрического эластомера располагается полость с воздухом под давлением. Вариант с предварительным раздуванием подобных гибридных актуаторов достаточно распространен в литературе, так как позволяет получать высокий уровень отклика от всей системы [55–58].
Таким образом, в настоящее время область диэлектрических эластомерных материалов для актуаторов мягкой робототехники получила серьезное развитие. Основные направления исследований связаны с повышением отклика материалов на электрический стимул за счет регулирования различных параметров: диэлектрической проницаемости материала, его топологии и толщины, а также механических характеристик.
1.2. Электрострикция
Другим перспективным принципом создания мягких актуаторов является использование электрострикционных полимерных материалов, способных к быстрой и обратимой деформации под действием электрического поля. Электрострикция – свойство материала, которое заключается в деформации (удлинении) тела в направлении электрического поля за счет накопления и разделения зарядов в материале.
Широкое развитие получили сегнето- и пьезоэлектрические сополимеры и наполненные системы. Принцип действия данных материалов связан с неоднородностью структуры, а именно наличием электрочувствительного домена, который обусловливает различную подвижность и поляризуемость компонентов или сегментов [59]. Создание таких материалов также сложно представить без высокоточных структурных исследований с использованием установок класса мегасайенс, таких как, например, синхротрон. В настоящее время ученые по всему миру активно применяют комплексный подход для выявления взаимосвязи структура–свойства при создании электрочувствительных материалов.
Полиуретановые эластомерные матрицы являются перспективными для создания электрочувствительных элементов мягкой робототехники. В [60] исследовали влияние природы растворителя (1-метил-2-пирролидон и N,N-диметилформамид) на структуру и электрострикционную активность композиционных пленок полиуретана (Estane 58 888-NAT 021), состоящего из 4,4'-метилендифенилизоционата и 1,4-бутандиола в качестве жестких сегментов и политетраметиленоксида (Mw = 1 кДа), выполняющего роль мягких блоков. Содержание жестких сегментов составляло ~46 мас. %. В качестве наполнителя использовали эмеральдиновую соль полианилина, привитую к лигнину, размер частиц составлял 2–3 мкм. Полимерные пленки получали методом полива из раствора с отверждением при 60°С в течение 24 ч и последующим отжигом при 125°С в течение 3 ч. Толщина полученных пленок составляла ~80 мкм. Приложение электрического поля приводит к деформации пленки. Зависимость электрострикционного отклика от напряженности электрического поля носит квадратичный характер, однако при превышении напряженности 4 кВ/мм практически не изменяется, что связано с насыщением поляризации дипольных моментов в гетерогенной полиуретановой матрице и подвижности жестких сегментов. Результаты МУРР показывают увеличение расстояния между жесткими доменами в структуре пленок с увеличением концентрации наполнителя, что связано с разделением фаз и процессами агломерации частиц. Было обнаружено, что расстояния между жесткими доменами больше для образцов, полученных из 1-метил-2-пирролидона. Очевидно, что этот растворитель приводит к более выраженному агрегированию и образованию упорядоченных кристаллических доменов при получении материала. Вероятно, водородные связи между соседними жесткими сегментами способствуют агрегации. Исследования механических характеристик композиционных материалов показали, что пленки, полученные из 1-метил-2-пирролидона, обладают повышенной электрострикционной активностью. Таким образом, выраженная доменная структура полимерных пленок повышает отклик материала на внешний стимул.
В [61] исследовали влияние морфологии полиуретанов на основе сополимера бутадиена с акрилонитрилом и гидроксильными окончаниями (Mw = 3.5 кДа, содержание цианогрупп 13.9 мас. %), гексаметилендиизоцианата и линейных алифатических двухатомных спиртов с различной длиной цепи на их диэлектрические и электромеханические свойства. Спирты выступали в качестве “удлинителей” цепи жесткого изоционатного блока. В работе использовали этиленгликоль, 1,4-бутандиол и 1,6-гександиол. Полиуретановые материалы получали реакцией гексаметилендиизоцианата и сополимера при 70°C в течение 2 ч с образованием прекурсора с концевыми изоцианатными группами. Затем проводили реакцию между полученным прекурсором и выбранным типом двухатомного спирта при 60°C в течение 2 ч с образованием целевого продукта. Конечные полиуретаны отверждали под вакуумом при 80°C в течение 12 ч и прессовали при температуре 200°C для получения пленок толщиной 100–200 мкм. Содержание жестких сегментов составило 37.6, 40.0 и 42.2 мас. % для материалов с этиленгликолем, 1,4-бутандиолом и 1,6-гександиолом соответственно. Данные широкоуглового рентгеновского рассеяния позволили выявить влияние длины цепи спирта на кристаллическую структуру и микрофазное разделение в полиуретановых пленках. На рентгеновских дифрактограммах образца полиуретанового эластомера с этиленгликолем наблюдали слабые пики при 6.7° и 20.8°, соответствующие межплоскостному расстоянию 13.3 и 3.9 Å соответственно. Профиль образца с 1,4-бутандиолом показывает пики дифракции при 20.5°, 22.2° и 24.1°, а на профиле полиуретана с 1,6-гександиолом наблюдаются пики дифракции при 11.8°, 19.8°, 21.6° и 23.7°. Степень кристалличности и размер кристаллита полиуретановых пленок зависят от длины цепи жестких сегментов. Структурные особенности пленок с микрофазным разделением также были исследованы методом МУРР, который показал наличие большого периода между жесткими и мягкими доменами перпендикулярно ламелям. Присутствие двух пиков (в малых и самых малых углах) означает формирование двух периодических структур и свидетельствует о многофазной структуре полиуретановых пленок, включающей в себя кристаллическую фазу и микрофазно разделенные жесткие и мягкие домены. Различная интенсивность и положение рефлексов для образцов, синтезированных с разными спиртами, указывают на различную степень микрофазного разделения, что находит свое отражение в электромеханических характеристиках материалов: электрострикционный коэффициент Q при частоте 1 Гц по абсолютной величине изменяется от 1.22 × 104 до 2.92 × 104 и 8.48 × 104 м4/Кл2 для образцов с этиленгликолем, 1,4-бутандиолом и 1,6-гександиолом соответственно. Деформация пленок под действием электрического поля связана с одновременным действием давления Максвелла и эффекта электрострикции, при этом вклад электрострикции в общую деформацию срабатывания составляет от 64 до 76% при напряженности поля 40 кВ/мм в зависимости от состава пленки.
Большими перспективами для актуаторов мягкой робототехники обладают блок-сополимеры и композиты на основе поливинилиденфторида (ПВДФ), проявляющие “гигантский” электрострикционный отклик за счет большого дипольного момента мономерного звена, обусловленного электроотрицательностью атомов фтора [62]. Значительный вклад в исследование свойств сегнетоэлектрических полимеров, в частности ПВДФ и ряда его сополимеров, внесен В.В. Кочервинским и соавт. [63–66]. Материалы на основе ПВДФ и его сополимеров изменяют свои электрофизические характеристики при крайне малом механическом воздействии. Им также свойственен обратимый механический отклик на пульсирующее электромагнитное поле [67]. Сегнетоэлектрические полимеры на основе ПВДФ способны кристаллизоваться в различных полиморфных модификациях: α (II), αp (IV), β (I), γ (III), различающихся типом упаковки цепей в элементарной ячейке. При этом тип фазы зависит от различных параметров, таких как концентрация полимера в растворе, тип растворителя, температура, скорость кристаллизации и др. Баланс кристаллических фаз, а также их трансформация при механическом или электрическом воздействии определяют сегнетоэлектрические свойства материала [68]. Например, за счет поликристаллической структуры пленки β-ПВДФ после поляризации обнаруживают пьезоэлектричество с неклассическим механизмом, сохраняющимся длительное время, что позволяет рассматривать изделия на их основе одновременно как сенсор и сонар – актуатор, реализующий как электрическое, так и акустическое и (или) электроакустическое стимулирование. Особое внимание уделяется влиянию структуры сополимеров ПВДФ. Функция изменения толщины пленки в общем случае должна иметь две составляющие, одна из которых связана с основной частотой ω, а другая – с ее гармоникой 2ω. Так, на сегнетоэлектрических образцах полимеров обнаружен сигнал пьезоотклика на второй гармонике, обусловленный проявлением эффекта электрострикции [69]. В исходной пленке обнаружены два типа областей, дающих вклад в измеряемый сигнал. В отожженной пленке изменение характера сигнала пьезоотклика на второй гармонике связывается с изменением вклада в макроскопический пьезоотклик от эффекта электрострикции. В обзоре [70] рассмотрена природа больших деформаций, обусловленных электрострикцией, в модифицированных фторсодержащих полимерных сегнетоэлектриках. Перспективным методом модификации материалов является облучение сополимеров ПВДФ с трифторэтиленом (ТрФЭ) электронами энергией в несколько мегаэлектронвольт. При этом для изотропных пленок петля гистерезиса поляризации резко уменьшается, а уменьшение толщины пленки не зависит от направления приложенного поля: механизм деформации не соответствует линейному пьезоэлектрическому эффекту. Облучение (как электронами, так и протонами) снижает степень кристалличности, приводит к переходу сегнетоэлектрической фазы в релаксорное состояние и параэлектрическую фазу. Эти структурные изменения вызваны образованием новых функциональных групп в цепях ПВДФ при радиолизе. Показано, что увеличение электрострикционной деформации после облучения связано с увеличением доли аморфной фазы. Это увеличенное напряжение (при прочих равных условиях) в ориентированных пленках по сравнению с изотропными указывает на то, что поле областей анизотропной аморфной фазы (мезоморфное состояние) играет важную роль. Анализ экспериментальных данных свидетельствует о том, что структурные изменения в поле (приводящие к электрострикционным деформациям) в значительной степени контролируются сегментарной подвижностью аморфных цепей.
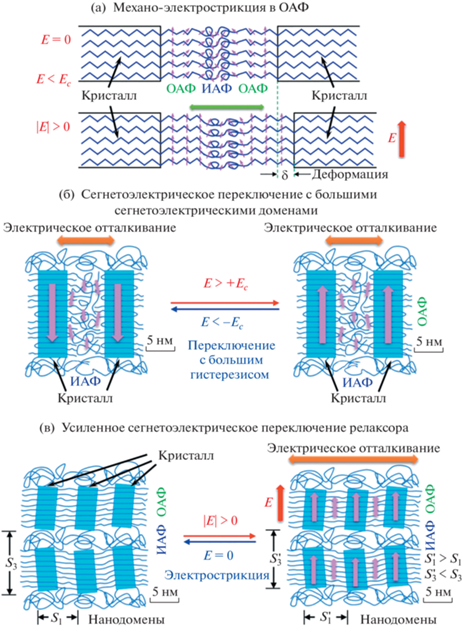
В [71] рассмотрены возможные механизмы электроактивного поведения материалов на основе сополимеров ПВДФ. В работе использовали статистические сополимеры П(ВДФ-ТрФЭ), 75/25) и тройной сополимер поли (винилиденфторид-трифторэтилен-хлорфторэтилен) (П(ВДФ-ТрФЭ-ХФЭ); 62.2/30.2/7.6 мол. %). Средневесовые молекулярные массы сополимеров составляли ~250 кДа при индексе полидисперсности 2.5. Пленки толщиной 30–40 мкм получали прессованием при температуре примерно на 30°C выше температуры плавления: 190 и 160°C для двойного и тройного сополимеров соответственно. Одноосное растяжение выполняли при комнатной температуре до 500% со скоростью 18 мм/мин. Полученные пленки обладали сложной структурой, в которой можно выделить кристаллическую, ориентированную (ОАФ) и изотропную (ИАФ) аморфные фазы. Содержание кристаллической фазы составило ~25 и 35% для двойного и тройного сополимера соответственно. При приложении к пленкам электрического поля меньше некоторой критической величины Ec на стимул реагирует только аморфная фаза, и конформация скрученной полимерной цепи трансформируется в более протяженную конформацию с диполями, ориентированными в направлении электрического поля, что приводит к сжатию и растяжению образца в соответствующих направлениях (рис. 3а). В этом процессе нет большого гистерезиса, и подобный отклик можно рассматривать как истинную электрострикцию. Когда сегнетоэлектрические домены большие, а приложенное электрическое поле близко к Ec, происходит переключение с большим гистерезисом (рис. 3б). Такое переключение нельзя рассматривать как истинную электрострикцию, хотя оно также может включать в себя цепные конформационные преобразования в ходе процесса. Однако, когда сегнетоэлектрические домены уменьшаются до нанометрового масштаба, гистерезис уменьшается и в таком случае нанокристаллы и ОАФ могут быть поляризованы при достаточно слабом электрическом поле. В результате электрическое отталкивание и ОАФ приведут к удлинению пленки в поперечном направлении и сжатию в продольном (рис. 3в). Для оценки вклада различных структурных доменов в процесс электрострикции были проведены рентгеноструктурные исследования пленок. Данные МУРР показывают различные расстояния между кристаллическими доменами в образцах, равные 7.8 и 9.5 нм соответственно, что связано с различной длиной цепи двойного и тройного сополимера. На картинах рентгеновского рассеяния наблюдаются характерные рефлексы сегнетоэлектрической фазы. Распределение интенсивности рассения соответствует ориентации цепей полимеров вдоль оси растяжения. Существуют два аналитических метода для оценки содержания кристаллитов, ОАФ и ИАФ в сильно вытянутых волокнах полукристаллических полимеров. Первый метод основан на анализе полной картины рассеяния с целью отделения кристаллической дифракции от фона и аморфного гало. Однако для статистических сополимеров со случайным составом элементарной ячейки применение этого метода затруднено. Второй метод предполагает анализ рассеяния ИАФ в областях, свободных от кристаллической дифракции и рассеяния ОАФ. Соответствующее програмное обеспечение позволяет осуществить деконволюцию пиков рассеяния и определить параметры рассеивающих областей. Полученные данные соответствуют структуре, представленной на рис. 3. Сопоставление полученных структурных данных с электромеханическими характеристиками материалов позволило получить представления о механизме деформации материала в электрическом поле. Первая причина – это механо-электрострикция, которая возникает в результате индуцированных полем конформационных перестроек цепей и является основным механизмом электрострикции в полях низкой напряженности. Вторая причина связана с электрическим отталкиванием между ориентированными сегнетоэлектрическими доменами и является основным механизмом электрострикции в сильных полях.
Рис. 3.
Вероятные механизмы электрострикционного отклика в частично кристаллических полимерах, содержащих ориентированную и изотропную аморфную фазу для случаев истинной (а), гистерезисной (б) и полной (в) электрострикции. Адаптировано из [71] с разрешения American Chemical Society.
В [72] разработан материал на основе матрицы (П(ВДФ-ТрФЭ-ХФЭ)), 61/29/10 мол. %) и мицелл поли(3-гексилтиофен)-блок-поли(метилметакрилата) (П3ГТ-б-ПММА, 25/75 мас. %, Mn = = 24 кДа, индекс полидисперсности 1.25) в качестве проводящего наполнителя. Мицеллы обладают сферической морфологией с ядром из поли(3-гексилтиофена) и оболочкой поли(метилметакрилата). Пленки толщиной 50 мкм с различным содержанием наполнителя (от 1 до 2 мас. %) получали методом полива из раствора диметилформамида и медленного высушивания при 25°C. Полученные пленки в условиях одноосного растяжения деформировали до 300% и подвергали отжигу при 80°C в течение 12 ч для фиксации образца. Степень кристалличности пленок возрастает с увеличением содержания наполнителя от 15.5 (чистая матрица) до 22.2% (содержание П3ГТ-б-ПММА – 2 мас. %). Размер кристаллитов при этом уменьшается от 39 до 20 нм соответственно. Вытягивание приводит к изменению структуры материала, что было показано рентгеноструктурным методом: после вытягивания и отжига наблюдаются преобладание параэлектрической фазы и практически полное исчезновение сегнетоэлектрической фазы в образце по сравнению с исходной пленкой. Изменение состава кристаллической фазы приводит к соответствующему изменению поляризации в электрическом поле. Отметим, что рост параэлектрической фазы приводит к более быстрой поляризации постоянных диполей в композиционном материале под действием электрического поля по сравнению с исходным материалом за счет потерь сегнетоэлектрической фазы. Сегнетоэлектрические домены вызвают гистерезис поляризации из-за кооперативной связи между собой. Таким образом, вытянутые пленки могут быстро вернуться к нулевой поляризации после снятия приложенного электрического поля, что приводит к быстрому механическому отклику материала. На примере пленок с содержанием П3ГТ-б-ПММА 1.5 мас. % было изучено изменение их структуры в процессе деформирования под действием электрического поля. Структурные данные пленки без электрического поля показывают преобладание параэлектрической кристаллической фазы. Содержание сегнетоэлектрической фазы плавно возрастает с ростом напряженности электрического поля с соответствующим уменьшением параэлектрической фазы. Фазовый переход кристаллов от параэлектрической фазы к сегнетоэлектрической наблюдали при напряженности электрического поля 5.5 кВ/мм. Полярные сегменты П(ВДФ-ТрФЭ-ХФЭ) в кристаллической области пленки ориентируются в направлении электрического поля, что в итоге приводит к перестройке объема пленки и влияет на поперечную деформацию. Таким образом, структурные исследования показали влияние процесса вытягивания и связанные с ним изменения структуры на электромеханические свойства пленок. Добавление П3ГТ-б-ПММА в П(ВДФ-ТрФЭ-ХФЭ) приводит к увеличению доли кристаллической сегнетоэлектрической фазы и уменьшению размера кристаллических зерен по сравнению с нативным полимером. Наполненные пленки проявляют улучшенные электромеханические свойства, связанные с гомогенным диспергированием наполнителя и, как следствие, равномерным распределением локального поля, что, в свою очередь, влияет на перестройку полярных групп в полимерных цепях и приводит к объемным изменениям пленки под действием электрического поля.
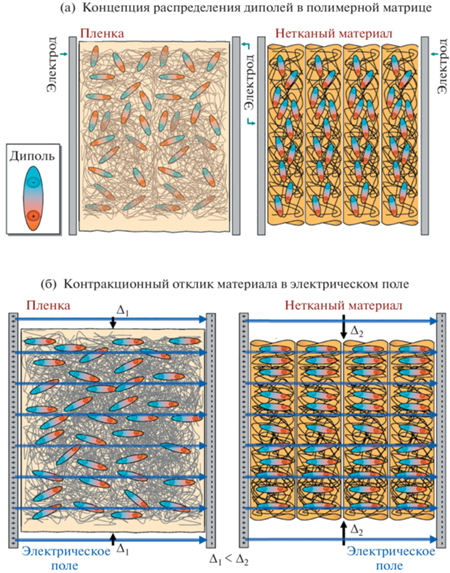
Применение технологии электроформования при получении электрочувствительных материалов на основе сополимеров ПВДФ также позволяет повысить электрострикционный отклик [73]. Так, нетканый материал из тройного сополимера поли(винилиденфторид-трифторэтилен-хлортрифторэтилен) (П(ВДФ-ТрФЭ-ХТрФЭ); 63/28/9 мол. %) демонстрирует отношение силы к массе на 65% выше, чем у пленки, следовательно, проявляет больший электрострикционный эффект. Нетканный материал получали из 30 мас. %-ного раствора сополимера в смесовом растворителе ацетон/диметилформамид (55/45 мас. %) при потенциале вытягивания 26 кВ и расстоянии до приемного барабана 14 см. Толщина полученных матов составляла 80 и 60 мкм, диаметр волокон в мате варьируется от 200 до 1000 нм, с основной фракцией 400–500 нм, сотавляющей ~23%. Повышенный электрострикционный отклик связан с методом получения нетканого материала: механические сдвиговые напряжения, сонаправленные с электрическим полем в процессе электроформования, приводят к ориентации полимерных цепей. Нановолокна имеют диполи с самоиндуцированной ориентацией, а поляризация в процессе электрострикции приводит к их переориентации. Кроме того, нановолокна имеют большее отношение площади поверхности к объему по сравнению с пленкой, что также увеличивает диэлектрическую проницаемость материала. Предполагается, что нановолокна обеспечивают лучшее выравнивание диполей в электрическом поле: в пленке на ориентацию диполей статистически влияет большее количество материала, чем в мате из нановолокон. На рис. 4 приведена схема электрострикционного эффекта в нетканом материале по сравнению с пленкой. Вне электрического поля наблюдается предварительная ориентация диполей в нановолокне по сравнению со случайным распределением в пленке. При приложении электрического поля происходит дипольная переориентация и нетканый материал демонстрирует большее сжатие по сравнению с пленкой Δ1 < Δ2 благодаря большей подвижности материала.
Рис. 4.
Схема электрострикционного отклика пленки и нетканого материала. Случайно ориентированные в материале диполи без электрического поля (а). Ориентационное упорядочение диполей в электрическом поле, приводящее к деформации (контракции) материала (б). Нетканый материал демонстрирует большее сжатие по сравнению с пленкой Δ1 < Δ2. Адаптировано из [73] с разрешения MDPI (Open Access).
Таким образом, анализ литературных данных показывает, что величина электрострикционного отклика в первую очередь определяется структурными особенностями материала: наличием легкополяризуемых сегментов или доменов, а также балансом сегнетоэлектрической и параэлектрической фаз.
В заключение раздела отметим, что при создании мягкого робототехнического устройства принципиально важными аспектами становятся не только механизм функционирования (давления Максвелла и/или электрострикции), электрочувствительность, сила деформации и податливость материала к внешнему стимулу, но и инженерная реализация актуаторного элемента. Поэтому далее рассмотрим основные современные подходы к проектированию и созданию мягкого робота.
2. РОЛЬ ИНЖЕНЕРНОГО ПРОЕКТИРОВАНИЯ ПРИ СОЗДАНИИ МЯГКОГО РОБОТА
Функциональные материалы, рассмотренные выше, могут быть использованы в различных узлах и конструкционных элементах мягких робототехнических устройств, которые зачастую обладают сложной геометрией и требуют особого подхода при проектировании. Часть таких инженерных проблем позволяют решить аддитивные технологии. Существует много обзоров, посвященных этой теме, но в данном разделе сфокусируемся только на основных подходах, используемых в мягкой робототехнике. Большинство технологий изготовления деталей и конструкционных элементов мягких роботов упрощенно можно отнести к трем основным группам:
– формование – изготовление деталей по заданной форме;
– субтрактивное производство – изготовление деталей за счет удаления материала;
– аддитивное производство – изготовление деталей за счет добавления материала.
В мягкой робототехнике, как правило, используют совмещение технологий: например, субтрактивным или аддитивным методом изготавливается форма, и в нее заливается необходимый материал. В частности, с помощью такого подхода был изготовлен “гибкий палец” из силикона с использованием латунной формы, способ получения которой схож с субтрактивным методом [74]. Другим примером является изготовление гибкого шарнирного привода с использованием формы, полученной не субтрактивным, а аддитивным методом [75]. Аналогично для изготовления формы и получения эластомерных модульных актуаторов может быть использована технология 3D-печати с последующей сборкой в единую конструкцию робота-гусеницы [76]. Элементы, свойства которых определяются искусственно созданной периодической структурой, называют метаматериалом. Таким образом, стремительно развивающиеся аддитивные технологии все чаще применяют в мягкой робототехнике. Это объясняется тем, что применение аддитивных технологий позволяет быстро и недорого изготавливать изделия с заданными свойствами и сложной топологией, свойственной объектам живой природы [77, 78]. Кратко рассмотрим применяемые сегодня аддитивные технологии.
2.1. Аддитивные технологии
Метод экструзионной печати – производство изделия методом послойного наплавления (Fused Deposition Modeling – FDM-печать) – процесс 3D-печати, в котором используется непрерывная нить из термопластичного материала, заключается в послойном нанесении расплавленного материала и его затвердевании при охлаждении. Данная технология является базовой, а также одной из наиболее дешевых, поэтому в мягкой робототехнике широко применяется для получения прототипов, форм и вспомогательных конструкций. FDM-печать является наиболее доступной за счет сравнительной простоты оборудования и, соответственно, его упрощенного технического обслуживания, а также легкости изготовления материала для печати (филамента). В [79] метод FDM-печати применяли для изготовления форм при создании мягкого “многоногого” (multi-legged) робота, авторам удалось разработать робота на основе силикона в виде щетки. “Щетинки” содержат порошок железа в качестве наполнителя и имитируют опорно-двигательный аппарат биологических систем, управляемый магнитным полем. Преимущество такой конструкции заключается в реализации функций, присущих отдельным животным, например, адаптивность осьминога к различным средам, преодоление препятствий гусеницей и т.д. Формование и регулирование плотности щетинок сложно представить без предварительного создания форм.
Другим примером применения метода 3D-печати является изготовление пневматических гибких приводов из термопластичного полиуретана методом фотополимеризации [80]. Фотополимеризация – метод изготовления деталей за счет послойного отверждения мономера под действием УФ-излучения. Возможны два способа реализации технологии: отверждение мономера в ванне согласно заранее запрограммированной маске или распыление мономера на рабочую поверхность с последующей “засветкой”. Данная технология аналогично FDM-печати широко применяется в мягкой робототехнике по причине простоты оборудования, универсальности использования и относительно низкой стоимости. Выигрышной особенностью применения данной технологии для создания элементов мягких робототехнических устройств является возможность печати как твердых деталей, например, изготовления форм, так и производство гибких деталей (например, актуаторов). Еще одним применением данной технологии является так называемая 4D-печать [81]. В этом случае на изготовленную с помощью 3D-принтера деталь оказывают внешнее воздействие, например, температурное, что приводит к конструкционному изменению детали за счет эффекта “памяти формы”. Детальное описание применения технологии для отверждаемых полимеров и эластомеров можно найти в обзорах [82, 83].
Селективное лазерное спекание (изготовление деталей из порошковых материалов путем их локального нагрева и спекания с помощью лазера) также относится к аддитивным технологиям [84]. Применение аддитивного порошкового производства деталей позволяет создавать элементы со сложной топологией, например, с внутренними каналами для подачи жидкости или детали с сетчатой структурой. Однако эта технология требует высоких затрат на оборудование и материалы, поэтому на данный момент ее применение в мягкой робототехнике ограниченно.
Отметим и технологию “быстрой жидкостной печати” – метод печати силиконами, который, как правило, применяется для изготовления мягких пневматических приводов. Технология выгодно отличается от традиционного силиконового литья и аддитивного производства эластомеров, предлагая свободу проектирования на высокой скорости без ущерба для свойств используемого материала [85]. Отдельный интерес в области аддитивных технологий представляют печать гидрогелями и биопечать [86]. В основе этих подходов лежит традиционная 3D-печать, однако в качестве материала-прекурсора используют гидрогели или специальные биочернила. Данные технологии, как и предыдущая, позволяют отказаться от использования литьевых форм и открывают возможности создания сложных гибких конструкций с предварительно запрограммированными свойствами, близкими к биологическим объектам. В последние годы активно развивается “гибридная печать” – метод заключается в использовании материалов, различающихся по свойствам [87, 88]. Например, печать гибкой подложки с последующим нанесением проводящих слоев.
Помимо описанных выше аддитивных технологий в мягкой робототехнике могут применяться технологии текстильной промышленности [89]. В частности, текстиль может использоваться в качестве армирующего элемента материала для усиления матрицы. Однако, несмотря на значительные достижения, эффективность и характеристики текстильных актуаторов в практическом применении по-прежнему остаются неудовлетворительными.
Таким образом, среди основных технологий для производства мягких роботов можно выделить аддитивные технологии, позволяющие быстро и из широкого набора материалов изготавливать различные конструкционные и функциональные элементы, в том числе сложной геометрии. Наиболее востребованными и активно развивающимися на данный момент являются технологии FDM и фотополимерной печати, биопечать, а также печать гидрогелями.
2.2. Применение численных методов при разработке мягких роботов
Компоненты мягких роботов, как правило, изготавливают из резиноподобных материалов, проявляющих нелинейные механические свойства при больших деформациях. С учетом сложной топологии мягких роботов, часто вдохновленной реальными природными объектами, аналитический расчет прочности, жесткости, надежности и эффективности таких изделий представляет собой непростую, а порой и неразрешимую задачу [90]. В этом случае широкое применение находит метод конечных элементов (МКЭ).
В настоящее время широко применяются коммерческие продукты: Abaqus, Ansys, COMSOL Multiphysics. К основным преимуществам коммерческих МКЭ-пакетов можно отнести понятный пользовательский интерфейс, обширную библиотеку материалов, возможность решения связанных нестационарных и нелинейных задач, широкие возможности по постпроцессорной обработке результатов, расширение функционала за счет создания скриптов. Решение задачи с помощью МКЭ можно разбить на несколько этапов: создание расчетной модели (пространственной или плоской), задание свойств материалов, разбиение на конечные элементы, наложение условий закрепления и нагружения, расчет и постпроцессорная обработка. Для создания моделей могут быть использованы как коммерческие системы автоматизированного проектирования (САПР): SolidWorks, Catia и др., так и встроенные в КЭ-комплексы модули САПР. Основные узлы мягких роботов, как было сказано выше, состоят из эластомеров, которые могут испытывать большие деформации до нескольких сотен и даже тысяч процентов. Для описания зависимости между напряжениями и деформациями в таких случаях используют специальные модели нелинейной упругости: Муни–Ривлина, Огдена, Йо и др. [90]. Определение неизвестных констант в этих моделях осуществляется по экспериментальным результатам механических испытаний на одноосное и двухосное растяжение, а также чистый сдвиг с последующей минимизацией ошибки между ординатами модельных и экспериментальных кривых [91, 92]. Рассмотрим применение МКЭ к некоторым практическим задачам проектирования мягких роботов как исключительно в коммерческих пакетах, так и в сочетании с пакетами вычислительной алгебры.
МКЭ был успешно применен для решения задачи топологической оптимизации пневматического захвата мягкого робота, состоящего из двух пальцев, по критерию максимизации изгибной деформации [93]. Для построения трехмерной модели захвата использовали встроенный CAE-модуль (Computer-aided Engineering – системы автоматизации инженерных расчетов) Abaqus, а для решения непосредственно задачи топологической оптимизации был разработан алгоритм, сочетающий в себе использование Abaqus и Matlab. Такой подход обусловлен желанием полностью контролировать процесс топологической оптимизации, так как большинство аналогичных модулей в коммерческих МКЭ-пакетах работают по принципу “черного ящика”. Для решения задачи нелинейного деформирования пневматического захвата использовали следующие параметры упругости материала: модуль Юнга – 1.585 МПа, коэффициент Пуассона – 0.49. Оптимизированные модели были изготовлены на 3D-принтере Objet 750 из резиноподобного материала. Проведенные эксперименты показали, что пневматический захват может развивать силу 0.23 Н при давлении срабатывания 0.06 МПа и удерживать небольшой воздушный шарик. При этом угол поворота захвата при изгибе составляет 14.71°.
В [94] предложена конструкция мягких вакуумных приводов, имитирующих строение спорангия папоротниковых деревьев. Ansys Workbench и Matlab использовали для прогнозирования развиваемой силы и угла поворота актуатора при создании вакуума. Трехмерная модель актуатора построена в SolidWorks и импортирована в модуль статических расчетов. Для определения механических параметров материала провели одноосные испытания на растяжение стандартизованных образцов, изготовленных с применением экструзионной печати из коммерческого термопластичного полиуретана (Ninjatek). Нелинейную зависимость между напряжениями и деформациями аппроксимировали с помощью встроенных моделей гиперупругого материала в Ansys Workbench. В итоге была выбрана пятипараметрическая модель Муни–Ривлина как наилучшим образом описывающая экспериментальную кривую в диапазоне деформаций до 200%. Деформирование актуатора в численном эксперименте осуществляли приложением отрицательного давления на внутренние поверхности модели с учетом контакта, возникающего между сегментами актуатора при больших деформациях. При этом угол поворота и сила, развиваемая захватом, были фиксированы. Близкие значения, полученные в численном и натурном экспериментах, свидетельствуют об адекватности предложенной модели и возможности дальнейшего усовершенствования конструкции привода.
Материалы, которые меняют свои геометрические и механические свойства в ответ на изменения условий окружающей среды, находят все большее применение в тканевой инженерии и мягкой робототехнике. Известно, что при поглощении воды большинство существующих мягких материалов, таких как гидрогели, демонстрируют набухание, т.е. положительное изменение объема. Отрицательное изменение объема (контракция) материала при погружении в воду встречается значительно реже. Изготовление материалов, способных к отрицательному набуханию, является актуальной и сложной задачей, а МКЭ становится незаменимым инструментом при прогнозировании свойств таких изделий. Так, с помощью МКЭ были разработаны мягкие композиционные метаматериалы с сетчатой структурой, позволяющей достичь больших отрицательных коэффициентов набухания [95]. МКЭ также позволил регулировать и прогнозировать связь между напряжениями и деформациями. Изготовленный метаматериал состоит из трех слоев: двух эластомерных – мягкого экзо-1,7,7-триметилбицикло(2,2,1)гептил-2-акрилата с фотоинициаторами (Tangoblackplus, Stratasys) и жесткого из экзо-1,7,7-триметилбицикло(2,2,1)гептил-2-акрилата, трициклодекандиметанолдиакрилата, диоксида титана и фотоинициаторов (RGD8530, Stratasys); гидрогеля (SUP705, Stratasys), состоящего из смеси поли (окси-1, 2-этандиила), α-(1-оксо-2-пропенил)-ω-гидрокси-1, 2-пропиленгликоля, полиэтиленгликоля, глицерина, фосфиноксида, фенилбис (2,4,6-триметилбензоила) и сложного эфира акриловой кислоты. Важно отметить, что деформация гидрогеля при набухании переходит в деформацию изгиба, что достигается размещением данной сэндвич-панели в области скруглений ячейки. Задачу нелинейного деформирования в Abaqus решали исходя из предположения линейно-упругих свойств геля и полиакрилата со значениями модуля упругости и коэффициента Пуассона, равными 65 МПа и 0.4 для жесткого полиакрилата и 0.2 МПа и 0.5 для гидрогеля соответственно. Модель Муни–Ривлина была использована для моделирования гиперупругого поведения эластомера. Применение МКЭ совместно с аналитическими и экспериментальными исследованиями позволяет получить мощную методику для создания метаматериалов с точно прогнозируемыми и регулируемыми свойствами, что может быть использовано в мягкой робототехнике. При разработке мягких роботов, функционирующих в водной среде, используется решение связанных задач деформирования конструкции в жидкости (FSI). Такой подход позволяет не только исследовать напряженно-деформированное состояние конструкции робота, но и, решив задачу вычислительной гидродинамики (CFD), построить поля перемещений, скоростей и ускорений, возникающих в жидкости при движении робота, оптимизировать его геометрию с учетом возникающих вихревых потоков, понизить энергопотребление [96, 97].
Таким образом, в настоящее время отдельными исследователями и лабораториями реализуется подход по разработке МКЭ-программного обеспечения под специальные задачи [96–98]. К недостаткам таких пакетов можно отнести ограниченный по сравнению с коммерческими продуктами функционал, к достоинствам – относительно низкую стоимость и гибкий подход к разработке новых МКЭ, оптимизацию численных алгоритмов, экспорт результатов расчета, в том числе с помощью пакетов вычислительной алгебры.
3. ПРИМЕНЕНИЕ ЭЛЕКТРОЧУВСТВИТЕЛЬНЫХ МАТЕРИАЛОВ ДЛЯ РОБОТОТЕХНИЧЕСКИХ УСТРОЙСТВ
Несмотря на то что исследователи и разработчики относительно недавно начали применять электрочувствительные материалы в мягкой робототехнике, число созданных прототипов и успешно опробованных изделий достаточно велико.
Одним из наиболее известных объектов, где успешно был применен электрочувствительный материал (диэлектрический эластомер), является робот, предназначенный для исследования Марианской впадины. Биологическим прототипом для него послужила глубоководная рыба-улитка [99]. В качестве материала при изготовлении мембраны-мускула выступил тройной блоксополимер поли(стирол-б-бутилакрилат-б-стирол), находящийся в растянутом состоянии. Предварительное растяжение мембраны было выполнено при помощи специальной мультиаксиальной системы. В качестве электродов использовался углеродонаполненный композит MG Chemicals 846.
В [100] представлен другой успешный пример создания мягкого робота, в конструкции которого был применен диэлектрический эластомер. Разработанный робот-гусеница способен не только ползать, но и взбираться по вертикальным плоскостям за счет наличия двух опорных, гибких, независимо управляемых электроадгезивных поверхностей, придающих ему дополнительные степени свободы (рис. 5а, 5б). Однако не удалось сделать его автономным, источник питания и элементы управления расположены вне корпуса.
Рис. 5.
Демонстрация мультимодального движения гусеницы в природе с большим числом степеней свободы (а). Мягкий робот, имитирующий гусеницу, смотрит влево под действием внешнего стимула, изгибая свое тело (б). Принцип работы робота, имитирующего медузу (в). Функциональный элемент (актуатор) состоит из двух эластомерных слоев, инкапсулирующих проводящую жидкость. При приложении электрического поля к внутреннему жидкостному электроду возникает давление Максвелла, приводящее к удлинению и истончению диэлектрической мембраны, а также изгибу в сторону нерастяжимого слоя (прокладки). Плавательный пузырь обеспечивает контроль плавучести. Флуоресцентное изображение робота (г). Адаптировано из [100] (а, б) и [102] (в, г) с разрешения Elsevier и Frontiers Media (Open Access) соответственно.
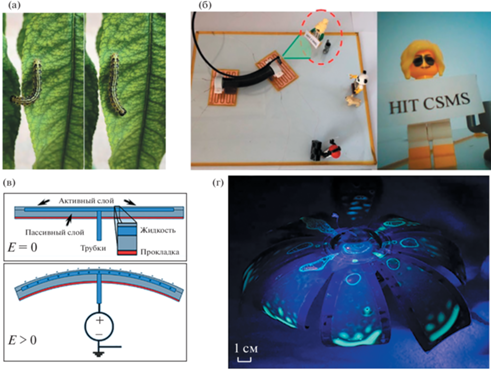
Еще один пример плавающего мягкого робота, движущим элементом которого является мембрана из электрочувствительного материала, описан в [101]. Робот имитирует лептоцефала – личиночную стадию угреобразных, однако имеет ограниченную автономность, так как источник питания и элементы управления находятся вне его тела. Оригинальность работы состоит в применении жидких электродов, обеспечивающих повышенную подвижность робота. В [102], взяв за биологический прототип медузу, смогли создать полностью автономного робота (рис. 5в, 5г), отказавшись от применения предварительно растянутой и закрепленной в жесткой раме мембраны диэлектрического эластомера: вместо этого нужного натяжения добились путем формования на неплоской жесткой подложке.
В [103] создали сухопутного насекомоподобного робота, применив диэлектрический эластомерный материал для мускула органа движения. Удалось создать автономную машину длиной всего 40 мм, имеющую “на борту” всю управляющую электронику и батарею. Ключевой технологией, благодаря которой стала возможной такая степень миниатюризации, является применение материала, чувствительного к стимулу при напряжениях менее 500 В. В работе использовали предварительно растянутую в двух направлениях и зафиксированную в жесткой раме мембрану из ПДМС толщиной 23 мкм.
Электрочувствительные материалы достаточно широко применяются при создании отдельных роботизированных приспособлений, для которых размещение источника питания и управляющей электроники вне основного корпуса не является критичным. Так, в [104] был изготовлен манипулятор для микроскопа. Для этого использовался трехслойный композит (ламинат) с ионопроводящей мембраной, зажатой между двумя электродами с электронной проводимостью – структура, моделирующая электрические двухслойные конденсаторы. С помощью этого материала удалось создать манипуляторы трех типов: миниатюрный захват (пинцет), манипулятор-пробник и миниатюрную пипетку.
Интересно отметить использование актуаторов, выполненных с применением электрочувствительных полимеров, в микрофлюидике. Такие материалы востребованы при конструировании микронасосов, микроклапанов и микромиксеров [105, 106]. Первый микроклапан на основе ионного полимер-металлического композита представлен в [105]. Предложенная конструкция была достаточно проста: актуатор из ионного полимер-металлического композита заключен в корпус из ПДМС и в нормальном состоянии, когда входное напряжение отключено, перекрывает проходящий внутри микроканал. При подаче напряжения правильной полярности актуатор отгибался вверх, открывая канал. В [106] предложили применение актуатора из электрочувствительного полимера в конструкции микросмесителя. Микромиксер предназначен для смешивания жидкостей с низкими числами Рейнольдса. Разработанный прототип активного смесителя является вторым, в котором в качестве смесительного элемента используется ионный полимерный преобразователь. Применяя некоторое запрограммированное периодическое или изменяющееся напряжение, например, последовательность импульсов, синусоидальная волна и т.д., можно создать изгибное колебание, позволяющее актуатору выступать в роли перемешивающего элемента ламинарных жидкостей.
Значительный интерес представляет работа [107], посвященная разработке элемента манипулятора – вращательной мягкой роботизированной системы, функционирующей за счет действия приводов из диэлектрического эластомера. Протестированная конструкция состоит из двух конусообразных предварительно растянутых на 10% мембран толщиной 50 мкм, жестко соединенных по внешнему диаметру и предварительно сжатых вне плоскости друг относительно друга с помощью жесткой прокладки. Углеродные (сажа) электроды были секторно нанесены на поверхность мембран при помощи трафаретной печати и разделены на четыре секции, управляемые независимо друг от друга, что обеспечивает большое число степеней свободы.
Таким образом, использование электрочувствительных полимерных материалов ассоциируется прежде всего с созданием различных миниатюрных самодвижущихся систем, имитирующих поведение природных организмов, а также миниатюрных манипуляторов и элементов актуаторов разного назначения. Применение стимул-чувствительных материалов оправдано несколькими факторами, проанализированными в [108], где на основе обобщения результатов сторонних работ пришли к выводу, что при использовании в конструкции актуатора электрочувствительного материала (диэлектрического эластомера) изделие может быть произведено всего в четыре стадии (в отличие, например, от производства различных типов актуаторов, использующих для функционирования сжатый воздух, производство которых требует пять или даже восемь стадий). Кроме того, для производства требуется, как правило, всего одна единица оборудования (в отличие от восьми единиц при других конструктивных решениях). К указанным в [108] возможным проблемам можно отнести повышенные (по сравнению с другими техпроцессами) требования к квалификации персонала, что может затруднить быстрое внедрение в массовое производство. Все эти отмеченные преимущества будут и в дальнейшем способствовать высокой популярности электрочувствительных материалов в мягкой робототехнике.
ЗАКЛЮЧЕНИЕ
Представлен краткий обзор современных исследований в области актуаторов мягкой робототехники, демонстрирующий ключевую роль разработки новых гибридных материалов и композитов, а также применения структурных методов с использованием установок класса мегасайенс для выявления взаимосвязи структура–свойства и исследования механизма электрострикционного эффекта.
Повышение диэлектрической проницаемости материалов и снижение их толщины открывают перспективы создания актуаторов с низким потенциалом отклика, менее 1 кВ. Большое значение имеет конструкция актуатора: создание многослойных элементов позволяет повысить его эффективность. Существенной проблемой при создании эластомерных электрочувствительных материалов является долговечность их функционирования, связанная с низкой адгезией проводящего (электродного) слоя к материалу и его разрушением при многократном срабатывании. Применение сегнетоэлектрических полимерных материалов позволяет добиться существенной деформации под действием электрического поля за счет дополнительного эффекта электрострикции, который может существенно превышать вклад давления Максвелла. В этом ключе значительный исследовательский интерес связан с сополимерами ПВДФ, проявляющего гигантский электрострикционный отклик.
Создание элементов мягких робототехнических систем сложно представить без применения аддитивных технологий, позволяющих проектировать как вспомогательные формы и конструкции для формования стимул-чувствительного материала, так и непосредственно отдельные элементы робота. Аналитические и численные подходы к расчету характеристик материалов и геометрий конструкций, реализованные как в коммерческих, так и открытых программных пакетах, выполняют предсказательную функцию при создании мягких актуаторов и открывают широкие перспективы при оптимизации дизайна новых природоподобных роботов.
Несмотря на существенный прогресс в развитии мягкой робототехники, cоздание полностью автономных роботов, способных долгосрочно функционировать аналогично живому организму, является современным научным вызовом. Чувствительность материалов к электрическому полю может быть положена в основу двигательных и перцептивных элементов робота, что открывает возможность для более широкого применения принципа природоподобия при создании искусственных систем. Систематизация современных данных о свойствах и составе перспективных стимул-чувствительных полимерных материалов для актуаторов мягкой робототехники позволяет определить дальнейшие направления развития этой специальной отрасли материаловедения.
Исследование выполнено при финансовой поддержке Госзадания НИЦ “Курчатовский институт”.
Список литературы
Darwin C. On the origin of species by means of natural selection, or the preservation of favoured races in the struggle for life / 1st ed. London: Murray, 1859.
Converging technologies for improving human performance nanotechnology, biotechnology, information technology and cognitive science / Eds. Roco M.C., Bainbridge W.S. Arlington: Virginia, 2002. https://doi.org/10.1007/978-94-017-0359-8
Ковальчук М.В. // Российские нанотехнологии 2011. Т. 6. № 1–2. С. 13.
Anastas P., Eghbali N. // Chem. Soc. Rev. 2010. V. 39. № 1. P. 301. https://doi.org/10.1039/b918763b
Wan B.N., Liang Y., Gong X.Z. et al. // Nucl. Fusion 2019. V. 59. № 11. P. 112003. https://doi.org/10.1088/1741-4326/ab0396
Namsaraev Z.B., Gotovtsev P.M., Komova A.V., Vasilov R.G. // Renew. Sustain. Energy Rev. 2018. V. 81. P. 625. https://doi.org/10.1016/j.rser.2017.08.045
Sheldon R.A., Woodley J.M. // Chem. Rev. 2018. V. 118. № 2. P. 801. https://doi.org/10.1021/acs.chemrev.7b00203
Adli M. // Nat. Commun. 2018. V. 9. № 1. P. 1911.https://doi.org/10.1038/s41467-018-04252-2
Gurtner G.C., Werner S., Barrandon Y., Longaker M.T. // Nature 2008. V. 453. № 7193. P. 314. https://doi.org/10.1038/nature07039
Murphy S.V., Atala A. // Nat. Biotechnol. 2014. V. 32. № 8. P. 773. https://doi.org/10.1038/nbt.2958
Демина В.А., Седуш Н.Г., Гончаров Е.Н. и др. // Российские нанотехнологии. 2021. Т. 16. № 1. С. 4. https://doi.org/10.1134/S1992722321010040
Богданова О.И., Истомина А.П., Чвалун С.Н. // Российские нанотехнологии. 2021. Т. 16. № 1. С. 50. https://doi.org/10.1134/S1992722321010039
Lecun Y., Bengio Y., Hinton G. // Nature. 2015. V. 521. № 7553. P. 436. https://doi.org/10.1038/nature14539
Kim S., Laschi C., Trimmer B. // Trends Biotechnol. 2013. V. 31. № 5. P. 287. https://doi.org/10.1016/j.tibtech.2013.03.002
Bauer S., Bauer-Gogonea S., Graz I. et al. // Adv. Mater. 2014. V. 26. P. 149. https://doi.org/10.1002/adma.201303349
Won P., Kim K.K., Kim H. et al. // Adv. Mater. 2021. V. 33. № 19. P. 2002397. https://doi.org/10.1002/adma.202002397
Chiolerio A., Quadrelli M.B. // Adv. Sci. 2017. V. 4. № 7. P. 1700036. https://doi.org/10.1002/advs.201700036
Gotovtsev P., Vorobiev V., Migalev A. et al. // Robotics. 2018. V. 7. № 1. P. 2. https://doi.org/10.3390/robotics7010002
Rus D., Tolley M.T. // Nature. 2015. V. 521. № 7553. P. 467. https://doi.org/10.1038/nature14543
Meng H., Li G. // Polymer. 2013. V. 54. № 9. P. 2199. https://doi.org/10.1016/j.polymer.2013.02.023
Sagdic K., Eş I., Sitti M., Inci F. // Trends Biotechnol. 2022. V. 40. № 8. P. 987.https://doi.org/10.1016/j.tibtech.2022.01.005
Fukui H., Tsuda T., Kaminaga Y., Kim Y. // Polym. Test. 2022. V. 111. April. P. 107596. https://doi.org/10.1016/j.polymertesting.2022.107596
Tohluebaji N., Putson C., Muensit N. // Polymers. 2019. V. 11. № 11. P. 1817.https://doi.org/10.3390/polym11111817
Feng C., Rajapaksha C.P.H., Cedillo J.M. et al. // Macromol. Rapid Commun. 2019. V. 40. № 19. P. 1900299. https://doi.org/10.1002/marc.201900299
Taccola S., Greco F., Sinibaldi E. et al. // Adv. Mater. 2015. V. 27. № 10. P. 1668. https://doi.org/10.1002/adma.201404772
Kuznetsov N.M., Kovaleva V.V., Belousov S.I., Chva-lun S.N. // Mater. Today Chem. 2022. V. 26. P. 101066. https://doi.org/10.1016/j.mtchem.2022.101066
Hwang T., Frank Z., Neubauer J., Kim K.J. // Sci. Rep. 2019. V. 9. № 1. P. 2. https://doi.org/10.1038/s41598-019-46147-2
Pelrine R., Kornbluh R., Pei Q., Joseph J. // Science. 2000. V. 287. № 5454. P. 836. https://doi.org/10.1126/science.287.5454.836
Anderson I.A., Gisby T.A., McKay T.G. et al. // J. Appl. Phys. 2012. V. 112. № 4. P. 041101. https://doi.org/10.1063/1.4740023
Marette A., Poulin A., Besse N. et al. // Adv. Mater. 2017. V. 29. № 30. P. 1700880. https://doi.org/10.1002/adma.201700880
Zhao H., Hussain A.M., Duduta M. et al. // Adv. Funct. Mater. 2018. V. 28. № 42. P. 1804328.https://doi.org/10.1002/adfm.201804328
Chen Y., Zhao H., Mao J. et al. // Nature. 2019. V. 575. № 7782. P. 324. https://doi.org/10.1038/s41586-019-1737-7
Sheima Y., Caspari P., Opris D.M. // Macromol. Rapid Commun. 2019. V. 40. № 16. P. 1900205.https://doi.org/10.1002/marc.201900205
Zhang Q.M., Li H., Poh M. et al. // Nature. 2002. V. 419. № 6904. P. 284. https://doi.org/10.1038/nature01021
Yang D., Ge F., Tian M. et al. // J. Mater. Chem. A. 2015. V. 3. № 18. P. 9468. https://doi.org/10.1039/c5ta01182e
Poulin A., Rosset S., Shea H.R. // Appl. Phys. Lett. 2015. V. 107. № 24. P. 244104.https://doi.org/10.1063/1.4937735
Ji X., El Haitami A., Sorba F. et al. // Sensors Actuators. B. Chem. 2018. V. 261. P. 135. https://doi.org/10.1016/j.snb.2018.01.145
Weiss F.M., Töpper T., Osmani B. et al. // Adv. Electron. Mater. 2016. V. 2. № 5. P. 1500476.https://doi.org/10.1002/aelm.201500476
Ding H., Zang W., Li J. et al. // Compos. Commun. 2022. V. 31. P. 101132. https://doi.org/10.1016/j.coco.2022.101132
Zhu Y., Chen H., Jiang L. et al. // Polymer. 2020. V. 192. February. P. 122301. https://doi.org/10.1016/j.polymer.2020.122301
Han M., Lee J., Kim J.K. et al. // Sensors Actuators. A. Phys. 2020. V. 305. P. 111941. https://doi.org/10.1016/j.sna.2020.111941
Lau G.K., Goh S.C.K., Shiau L.L. // Sensors Actuators. A. Phys. 2011. V. 169. № 1. P. 234. https://doi.org/10.1016/j.sna.2011.04.037
Fan H., Li K., Li Q. et al. // J. Mater. Chem. C. 2017. V. 5. № 37. P. 9778. https://doi.org/10.1039/c7tc03358c
Xiao Y., Mao J., Shan Y. et al. // Nanoscale. 2020. V. 12. № 14. P. 7514. https://doi.org/10.1039/d0nr00924e
Zhao H., Wang D.-R., Zha J.-W. et al. // J. Mater. Chem. A. 2013. V. 1. № 9. P. 3140. https://doi.org/10.1039/c2ta01026g
Huang J., Zhang X., Liu R. et al. // Nature Portfolio. 2022. https://doi.org/10.21203/rs.3.rs-1575561/v1
Park M., Im J., Shin M. et al. // Nat. Nanotechnol. 2012. V. 7. № 12. P. 803. https://doi.org/10.1038/nnano.2012.206
Park J., Choi S., Janardhan A.H. et al. // Sci. Transl. Med. 2016. V. 8. № 344. P. 344ra86.https://doi.org/10.1126/scitranslmed.aad8568
Kim B., Park Y.D., Min K. et al. // Adv. Funct. Mater. 2011. V. 21. № 17. P. 3242. https://doi.org/10.1002/adfm.201100298
Zhang H., Xia Z., Zhang Z., Zhu J. // J. Micromech. Microeng. 2022. V. 32. № 6. P. 064004.https://doi.org/10.1088/1361-6439/ac6aa5
Liebscher H., Tahir M., Wiessner S., Gerlach G. // Electroactive Polymer Actuators and Devices (EAPAD) XXIV / Ed. Madden J.D. SPIE, 2022. P. 41. https://doi.org/10.1117/12.2612354
Wang R., Zhang C., Tan W. et al. // Soft Robot. 2022. V. 10. № 1. P. 119.https://doi.org/10.1089/soro.2021.0104
Koenigsdorff M., Mersch J., Pfeil S., Gerlach G. // Electroactive Polymer Actuators and Devices (EAPAD) XXIV / Ed. Madden J.D. SPIE, 2022. P. 64. https://doi.org/10.1117/12.2612172
Kumar A., Khurana A., Sharma A.K., Joglekar M.M. // Eur. J. Mech. A. Solids. V. 95. 2022. P. 104636. https://doi.org/10.1016/j.euromechsol.2022.104636
Zhu J., Cai S., Suo Z. // Int. J. Solids Struct. 2010. V. 47. № 24. P. 3254. https://doi.org/10.1016/j.ijsolstr.2010.08.008
Chen F., Cao J., Zhang H. et al. // IEEE/ASME Trans. Mechatronics 2019. V. 24. № 1. P. 45. https://doi.org/10.1109/TMECH.2018.2871176
Fox J.W., Goulbourne N.C. // J. Mech. Phys. Solids 2009. V. 57. № 8. P. 1417. https://doi.org/10.1016/j.jmps.2009.03.008
Zhao X., Suo Z. // Appl. Phys. Lett. 2008. V. 93. № 25. P. 251902.https://doi.org/10.1063/1.3054159
Martins P., Lopes A.C., Lanceros-Mendez S. // Prog. Polym. Sci. 2014. V. 39. № 4. P. 683. https://doi.org/10.1016/j.progpolymsci.2013.07.006
Jaaoh D., Putson C., Muensit N. // Polymer. 2015. V. 61. P. 123. https://doi.org/10.1016/j.polymer.2015.01.081
Xiang D., He J., Cui T. et al. // Macromolecules. 2018. V. 51. № 16. P. 6369. https://doi.org/10.1021/acs.macromol.8b01171
Yuan X., Gao X., Shen X. et al. // Nano Energy. 2021. V. 85. P. 105985. https://doi.org/10.1016/j.nanoen.2021.105985
Kochervinskii V. V., Malyshkina I.A., Markin G.V. et al. // J. Appl. Polym. Sci. 2007. V. 105. P. 1101. https://doi.org/10.1002/app.26145
Kochervinskii V., Kozlova N., Malyshkina I., Asta-khov V. // Ferroelectrics. 2018. V. 531. № 1. P. 1. https://doi.org/10.1080/00150193.2018.1497407
Kochervniskii V.V., Astakhov V.A., Bedin S.A. et al. // Colloid Polym. Sci. 2020. V. 298. № 9. P. 1169. https://doi.org/10.1007/s00396-020-04691-8
Kochervinskii V.V., Gradova M.A., Gradov O.V. et al. // J. Appl. Polym. Sci. 2022. V. 139. № 42. P. e53025. https://doi.org/10.1002/app.53025
Кочервинский В.В., Градов О.В., Градова М.А. // Гены и клетки 2019. Т. XIV. С. 122.
Кочервинский В.В. // Успехи химии 1996. Т. 65. № 10. С. 936.
Кочервинский В.В., Киселев Д.А., Малинкович М.Д. и др. // Высокомол. соединения. А 2013. Т. 56. № 1. С. 53. https://doi.org/10.7868/s2308112014010064
Kochervinskij V.V. // Crystallography Reports. 2009. V. 54. № 7. P. 1146. https://doi.org/10.1134/S1063774509070062
Wongwirat T., Zhu Z., Rui G. et al. // Macromolecules. 2020. V. 53. № 24. P. 10942. https://doi.org/10.1021/acs.macromol.0c02083
Kim I.J., Cho K.Y., Kim E. et al. // Nanomaterials. 2021. V. 11. № 1. P. 6. https://doi.org/10.3390/nano11010006
D’anniballe R., Zucchelli A., Carloni R. // Nanomaterials. 2021. V. 11. № 1. P. 172. https://doi.org/10.3390/nano11010172
Mao Z., Nagaoka T., Yokota S., Kim J. wan. // Sensors Actuators, A. Phys. 2020. V. 310. P. 112034. https://doi.org/10.1016/j.sna.2020.112034
Xu M., Wang G., Rong C. // Sensors Actuators A. Phys. 2022. V. 340. October 2021. P. 113522. https://doi.org/10.1016/j.sna.2022.113522
Grossi B., Palza H., Zagal J.C. et al. // Mater. Des. 2021. V. 212. P. 110285. https://doi.org/10.1016/j.matdes.2021.110285
Stano G., Percoco G. // Extrem. Mech. Lett. 2021. V. 42. P. 101079. https://doi.org/10.1016/j.eml.2020.101079
Hasan M.H., Sagor J.A., Agarwala I. // Mater. Today Proc. 2022. V. 50. P. 1088. https://doi.org/10.1016/j.matpr.2021.07.468
Sun D., Zhang J., Fang Q. et al. // Biomim. Intell. Robot. 2022. V. 2. № 1. P. 100030. https://doi.org/10.1016/j.birob.2021.100030
Xavier M.S., Tawk C.D., Yong Y.K., Fleming A.J. // Sensors Actuators. A. Phys. 2021. V. 332. P. 113199. https://doi.org/10.1016/j.sna.2021.113199
Choong Y.Y.C., Maleksaeedi S., Eng H. et al. // Mater. Des. 2017. V. 126. P. 219. https://doi.org/10.1016/j.matdes.2017.04.049
Ge Q., Jian B., Li H. // Forces Mech. 2022. V. 6. P. 100074. https://doi.org/10.1016/j.finmec.2022.100074
Layani M., Wang X., Magdassi S. // Adv. Mater. 2018. V. 30. № 41. P. 1706344.https://doi.org/10.1002/adma.201706344
Wallin T.J., Pikul J., Shepherd R.F. // Nat. Rev. Mater. 2018. V. 3. №6. P. 84. https://doi.org/10.1038/s41578-018-0002-2
Sparrman B., du Pasquier C., Thomsen C. et al. // Addit. Manuf. 2021. V. 40. 2020. P. 101860. https://doi.org/10.1016/j.addma.2021.101860
Li J., Wu C., Chu P.K., Gelinsky M. // Mater. Sci. Eng. R Rep. 2020. V. 140. 2019. P. 100543. https://doi.org/10.1016/j.mser.2020.100543
Valentine A.D., Busbee T.A., Boley J.W. et al. // Adv. Mater. 2017. V. 29. № 40. P. 1703817.https://doi.org/10.1002/adma.201703817
Zhang Y.-F., Zhang N., Hingorani H. et al. // Adv. Funct. Mater. 2019. V. 29. P. 1806698. https://doi.org/10.1002/adfm.201806698
Fu C., Xia Z., Hurren C. et al. // Biosens. Bioelectron. 2022. V. 196. 2021. P. 113690. https://doi.org/10.1016/j.bios.2021.113690
Xavier M.S., Fleming A.J., Yong Y.K. // Adv. Intell. Syst. 2021. V. 3. № 2. P. 2000187. https://doi.org/10.1002/aisy.202000187
Белкин А.Е., Даштиев И.З., Костромицких А.В. // Изв. вузов. Машиностроение. 2016. Т. 8. № 737. С. 3. https://doi.org/10.18698/0536-1044-2016-8-3-10
Кузнецов Н.М., Банин Е.П., Крупнин А.Е. и др. // Вестн. МГТУ им. Н.Э. Баумана. Сер. Естественные науки 2022. Т. 6. № 105. С. 123. https://doi.org/10.18698/1812-3368-2022-6-123-143
Zhang H., Kumar A.S., Fuh J.Y.H., Wang M.Y. // Soft Robot. 2018. V. 5. № 5. P. 650. https://doi.org/10.1089/soro.2017.0058
Tawk C., In Het Panhuis M., Spinks G.M., Alici G. // Soft Robot. 2018. V. 5. № 6. P. 685. https://doi.org/10.1089/soro.2018.0021
Zhang H., Guo X., Wu J. et al. // Sci. Adv. 2018. V. 4. № 6. P. eaar8535. https://doi.org/10.1126/sciadv.aar8535
Costa D., Franciolini M., Palmieri G. et al. // 2017 IEEE Int. Conf. Robot. Biomimetics. ROBIO-2017. 2018. V. 2018. Janua. P. 135. https://doi.org/10.1109/ROBIO.2017.8324407
Ulloa C.C., Terrile S., Barrientos A. // Appl. Sci. 2020. V. 10. № 20. P. 7160. https://doi.org/10.3390/app10207160
Grazioso S., Di Gironimo G., Siciliano B. // Soft Robot. 2019. V. 6. № 6. P. 790. https://doi.org/10.1089/soro.2018.0047
Li G., Chen X., Zhou F. et al. // Nature. 2021. V. 591. № 7848. P. 66. https://doi.org/10.1038/s41586-020-03153-z
Guo Y., Guo J., Liu L. et al. // Extrem. Mech. Lett. 2022. V. 53. P. 101720. https://doi.org/10.1016/j.eml.2022.101720
Christianson C., Goldberg N.N., Deheyn D.D. et al. // Sci. Robot. 2018. V. 3. № 17. P. eaat1893. https://doi.org/10.1126/SCIROBOTICS.AAT1893
Christianson C., Bayag C., Li G. et al. // Front. Robot. AI. 2019. V. 6. P. 126. https://doi.org/10.3389/frobt.2019.00126
Ji X., Liu X., Cacucciolo V. et al. // Sci. Robot. 2019. V. 4. № 37. P. eaaz6451.https://doi.org/10.1126/scirobotics.aaz6451
Must I., Rinne P., Krull F. et al. // Front. Robot. AI. 2019. V. 6. P. 140.https://doi.org/10.3389/frobt.2019.00140
Yun J.S., Yang K.S., Choi N.J. et al. // J. Nanosci. Nanotechnol. 2011. V. 11. № 7. P. 5975. https://doi.org/10.1166/jnn.2011.4459
Meis C., Montazami R., Hashemi N. // Anal. Methods. 2015. V. 7. № 24. P. 10217. https://doi.org/10.1039/c5ay01061f
Nalbach S., Banda R.M., Croce S. et al. // Front. Robot. AI. 2020. V. 6. P. 150.https://doi.org/10.3389/frobt.2019.00150
Seçkin M., Yaman T.N., Çağdaş A.S. // International Conference on Advances in Software, Control and Mechanical Engineering (ICSCME’2015). Antalya (turkey). 2015. P. 1. https://doi.org/10.17758/ur.u0915114
Дополнительные материалы отсутствуют.
Инструменты
Российские нанотехнологии