

Приборы и техника эксперимента, 2022, № 2, стр. 79-98
ЦИФРОВОЕ ДЕТЕКТИРОВАНИЕ ОПТИЧЕСКОГО СИГНАЛА В МИКРОСКОПЕ БЛИЖНЕГО ОПТИЧЕСКОГО ПОЛЯ
Д. В. Казанцев a, b, *, Е. А. Казанцева c
a Институт теоретической и экспериментальной физики им. А.И. Алиханова
117219 Москва, Большая Черемушкинская ул., 25, Россия
b Национальный исследовательский университет “Высшая школа экономики”, факультет физики
105064 Москва, Старая Басманная ул., 21/4, стр. 5, Россия
c Московский технологический университет МИРЭА
119454 Москва, просп. Вернадского, 78, Россия
* E-mail: kaza@itep.ru
Поступила в редакцию 20.10.2021
После доработки 23.11.2021
Принята к публикации 25.11.2021
- EDN: ECRKLS
- DOI: 10.31857/S0032816222020148
Аннотация
Описана цифровая электронная система выделения оптического сигнала в безапертурном сканирующем микроскопе ближнего оптического поля (ASNOM), работающем в режиме упругого рассеяния света. Сигнал фотодетектора получается путем оптического гомодинирования света, для чего используется схема интерферометра Майкельсона. В качестве модулирующего воздействия в ASNOM используется колебание кантилевера на его резонансной частоте (30–300 кГц), вызывающее периодическое изменение расстояния игла–поверхность. В качестве полезного сигнала в спектре фототока используется амплитуда одной (или нескольких) высших гармоник частоты колебаний иглы. Дополнительная модуляция фазы гомодинирующего света обеспечивается периодическим изменением длины опорного плеча в схеме Майкельсона, что позволяет достоверно измерять не только амплитуду ближнепольного оптического сигнала, но и его фазу. Перевод сигнала фототока детектора в цифровую форму непосредственно на входе детектирующей системы позволил реализовать довольно сложные алгоритмы выделения полезного сигнала. Модульность алгоритмов обработки информации обеспечивает гибкость в вариантах детектирования сигнала, а также надежность модификации и настройки отдельных частей алгоритма. Рассмотрены особенности прибора, порождающие ошибки измерения.
ВВЕДЕНИЕ
Безапертурная сканирующая микроскопия ближнего оптического поля (ASNOM) [1] известна как информативный метод локального измерения оптических свойств поверхности, обеспечивающий пространственное разрешение до 1 нм в плоскости образца [2, 3], притом вне зависимости от длины волны используемого для измерений света [4–6]. Было успешно продемонстрировано [7, 8] распознавание образующих образец материалов по ASNOM-изображению поверхности, получены карты распределения локального поля над поверхностью в видимом [9] и инфракрасном оптических диапазонах [10]. Изображения ASNOM, полученные на биологических образцах [11, 12], позволяют по характерным спектрам идентифицировать, например, в оболочке вирусов положение фрагментов, содержащих Amide I и Amide II. Безапертурный SNOM также успешно применялся [13] в режиме комбинационного рассеяния (TERS), однако для этих измерений требуются несколько другие алгоритмы выделения ближнепольной компоненты в собираемом оптическом сигнале.
В целом, нанометровое оптическое разрешение метода (даже при рабочих длинах волн, соответствующих терагерцовому диапазону частот) обеспечивается нерадиационными (не излучаемыми в виде волн) электромагнитными полями в зазоре между иглой и образцом. Ширина “пятна контакта”, в котором сконцентрированы эти локальные поля между иглой и образцом, определяется радиусом кривизны острия иглы и составляет обычно несколько нанометров. Зондирующая игла длиной 7–15 мкм, обычно покрытая металлом для оптимизации оптических свойств, служит как бы штыревой антенной, позволяющей принять из эфира (из радиационных мод) и затем излучить в эфир колебания электрического поля. Разумеется, фаза и амплитуда излучаемого такой антенной сигнала зависит от условий ее “заземления” острием, находящимся в емкостном контакте с поверхностью образца. Амплитуда волны, излучаемой иглой микронных размеров, очень слаба. Совершенно естественно применить в этом случае для выделения полезного сигнала модуляционные методики. В качестве модулирующего воздействия в ASNOM, как правило, используют вынужденные изгибные колебания несущего иглу кантилевера атомно-силового микроскопа (а.с.м.) на его резонансной частоте (30–300 кГц). Расстояние игла–поверхность в такой системе меняется с частотой колебаний кантилевера, притом размах колебаний (30–150 нм) обычно превышает характерное расстояние ближнепольного электромагнитного взаимодействия игла–образец, и таким образом в пределах периода колебаний иглы это ближнепольное взаимодействие острия с поверхностью принимает состояние “включено” и “полностью выключено”. Зависимость амплитуды рассеянной иглой волны от расстояния игла–поверхность имеет сильно нелинейный характер (ближнепольное взаимодействие включается лишь на расстояниях игла–образец порядка радиуса иглы). Выводимый детектором электрический сигнал представляет, таким образом, серию импульсов с частотой повторения, равной частоте колебаний кантилевера, и коротких по сравнению с их периодом (соответствующих электромагнитному “касанию” образца иглой). Таким образом, интересующая экспериментатора амплитуда ближнепольного сигнала соответствует амплитуде высших гармоник [14] частоты вынужденных колебаний кантилевера (30–300 кГц). Эта методика выделения полезного сигнала применима как к упругому рассеянию возбуждающего света (без изменения его частоты), так и методикам нанолюминесценции и комбинационного рассеяния на игле (TERS) [15, 16].
В системах ASNOM упругого рассеяния света (когда волна рассеянного иглой света может считаться почти когерентной с волной лазера возбуждения оптических колебаний в игле) применяется еще один метод значительного повышения оптической чувствительности – оптическое гомодинирование [17] и гетеродинирование [18]. Для этого на чувствительную площадку фотодетектора одновременно с лучом света, рассеянного зондирующей иглой, направляют луч лазера, возбуждавшего оптические колебания в игле и образце под ней [19]. Довольно распространенной является схема интерферометра Майкельсона (рис. 1), которая выгодно отличается для ASNOM от схемы Маха–Цендера [20] (с акустооптическим модулятором) своей независимостью от рабочей длины волны света. Электрическая амплитуда импульса фототока, соответствующего в такой схеме возникновению ближнепольного оптического взаимодействия между иглой и образцом, определяется вариацией квадрата амплитуды суммарного электромагнитного поля волны, рассеянной на игле, и волны, отраженной от зеркала в опорном плече интерферометра. Как показано на рис. 1, суммарная оптическая амплитуда этих полей зависит от взаимной фазы рассеянной на игле и отраженной от зеркала волн. Соответственно, в зависимости от фазы опорного луча электрический импульс фототока в момент касания иглой поверхности может оказаться как положительным, так и отрицательным. Его амплитуда ожидаемо зависит от фазы опорного луча синусоидальным образом. Значительно расширить объем получаемой из сигнала информации позволяет вариация фазы опорного луча. При провороте этой фазы на 360° конец фазора полезного сигнала должен описать окружность на комплексной плоскости. В идеальном случае (когда траектория конца фазора действительно представляет собой окружность) достаточно всего двух измерений комплексных координат характерных точек этой окружности. Например, можно записать два изображения поверхности [21], когда фазы опорного луча отличаются друг от друга ровно на 90°. В общем случае, разумеется, желательно проделать плавное изменение фазы опорного луча и затем усреднить результат.
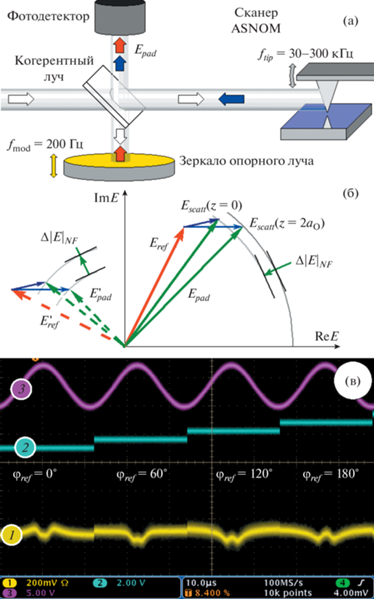
Рис. 1.
Оптическое гомодинирование сигнала, рассеянного зондирующей иглой: a – когерентный луч лазера разделяется на два луча, один из которых фокусируется на зондирующую иглу, а второй направляется на зеркало опорного плеча в интерферометре Майкельсона; после рассеяния на игле или отражения от зеркала оба когерентных между собой луча попадают на фотодетектор; б – на комплексной плоскости показаны фазоры, соответствующие комплексной амплитуде рассеянной на игле волны ${{E}_{{scatt}}}$ (показаны два варианта – в момент касания поверхности и вдали от нее), амплитуде волны, вернувшейся из опорного плеча (${{E}_{{ref}}}$), и амплитуде (${{E}_{{pad}}}$) суммарного поля, освещающего светочувствительную площадку детектора; фототок детектора пропорционален квадрату длины фазора суммарной амплитуды ${{E}_{{pad}}}$, которая зависит от соотношения фаз рассеянной и опорной волны; в – амплитуда и полярность импульса в фототоке (луч 1), соответствующего “касанию” иглой поверхности (луч 3 – ее положение) зависят на осциллограмме от фазы опорного луча (луч 2).
В системах оптического гетеродинирования на светочувствительную площадку фотодетектора вместе с рассеянным зондирующей иглой светом попадает опорный луч, рассеянный акустооптическим модулятором на некоторый угол (определяемый условиями волнового синхронизма в нелинейном кристалле) и совмещенный затем с лучом от иглы по оптической схеме Маха–Цендера. В процессе рассеяния в акустооптическом модуляторе на бегущей акустической волне луч лазера сдвигается по частоте на частоту акустической волны Ωmod = 40–100 МГц. Это означает, что фазор ${{E}_{{ref}}}$ вращается на комплексной плоскости относительно фазора ${{E}_{{scatt}}}$ с угловой частотой ${{\Omega }_{{\bmod }}}$. Электрический сигнал на выходе фотодетектора, определяемый биениями между ${{E}_{{ref}}}$ и ${{E}_{{scatt}}}$, имеет таким образом частоту около ${{\Omega }_{{\bmod }}}$, притом этот сигнал промодулирован еще и механическими колебаниями иглы ASNOM, вызывающими периодические вариации ${{E}_{{scatt}}}$. Гетеродинная схема детектирования световой волны, рассеянной зондирующей иглой, имеет два серьезных недостатка: а) угол рассеяния исходной лазерной волны в модуляторе зависит от длины волны, так что изменение рабочей длины волны требует переюстировки прибора; б) электрический сигнал с выхода фотодетектора имеет характерную область частот порядка Ωmod = 40–100 МГц, что существенно ограничивает выбор фотоприемника.
Суммируя вышеизложенное, для измерения сигнала ближнепольного оптического взаимодействия иглы с образцом, с одновременной регистрацией амплитуды и фазы этого сигнала, требуется выделение вариаций фототока на высшей гармонике (высших гармониках) частоты механических колебаний кантилевера и дополнительная обработка полученного сигнала с учетом дополнительной модуляции фазы гомодинирующего (гетеродинирующего) луча в интерферометре. Традиционные приборы демодуляции (синхронные детекторы), соединенные между собой сигнальными кабелями, не вполне способны справиться с задачей при синусоидальном движении зеркала в опорном плече. Полезный сигнал изменяется во времени по закону ${{A}_{0}}\sin ({{{{\theta }}}_{0}}\sin ({{{{\omega }}}_{0}}t))$, который может быть выражен через функцию Бесселя [19]. Довольно естественно в такой ситуации обрабатывать входной сигнал цифровым способом [22].
ОПИСАНИЕ УСТАНОВКИ
Для организации цифрового сбора и последующей цифровой обработки сигнала мы использовали плату ввода-вывода P25M (Innovative Integration, Inc.) [23]. На этой плате имеются 4 канала 16-битовых аналого-цифровых преобразователей (а.ц.п.), работающих с максимальной частотой отсчетов до 25 Msps, и 4 канала 16-битовых цифроаналоговых преобразователей (ц.а.п.), допускающих частоту вывода до 50 Msps, работающих под управлением программируемой логической интегральной схемы (п.л.и.с., FPGA) Spartan-3. Тактовую частоту а.ц.п. и ц.а.п. можно задавать цифровым образом с весьма высокой точностью. Собранные с а.ц.п. данные попадают сначала в FIFO-регистр п.л.и.с., а затем могут быть переданы на шину локального процессора платы либо прямым чтением из соответствующего регистра данных п.л.и.с., либо в режиме прямого доступа к памяти (по прерыванию, вызываемому в пространстве центрального процессора платы заполнением FIFO-регистра).
На плате P25M имеется собственный процессор Texas Instruments TMS320C6713 с кэш-памятью 128 Мбайт, работающий на отдельной шине адресов и данных, к которой подключено оперативное запоминающее устройство (2 Мбайт). К этой шине подключены также п.л.и.с., управляющая работой а.ц.п. и ц.а.п., и п.л.и.с., управляющая со стороны платы приемом-передачей данных по PCI-каналу.
Драйверы, обеспечивающие общеупотребительные режимы сбора данных (прямого доступа к памяти, прерывания, программирование числа одновременно читаемых в FIFO-буфер каналов а.ц.п., тактовой частоты, способа запуска последовательности измерений и т.п.), предоставлены для систем с процессором TMS320C6713 фирмой Texas Instruments и неплохо документированы. Блок сбора и вывода аналоговых данных (б.с.в.а.д.), расположенный на плате P25M, состоит из набора а.ц.п. и ц.а.п., управляющей ими п.л.и.с. и процессора платы.
Аппаратура платы P25M (другая п.л.и.с. Spartan-3A) предусматривает передачу данных в персональный компьютер (п.к.) IBM PC через слот PCI-X на материнской плате, в которую вставляется эта измерительная плата. Максимальная пропускная способность PCI-канала составляет 512 Мбит/с. Материнская плата SuperMicro работает под управлением операционной системы Windows XP или Windows 7, и фирма Innovative Integration предоставляет драйверы, обеспечивающие передачу данных в измерительную плату из компьютера и обратно. Передача начинается по инициативе источника данных, а на приемной стороне данные переносятся в буфер до тех пор, пока его емкость не исчерпается. Приемник данных, получив прерывание о готовности очередного пакета данных в драйвере PCI-шины, активизируется этим прерыванием и получает от драйвера указатель на область памяти, где лежит свежепринятый пакет данных.
Электроника платы P25M содержит 4 независимые микросхемы а.ц.п. Работа п.л.и.с. может быть запрограммирована так, что в регистр FIFO (очередь) попадают данные с выходов либо двух, либо всех четырех а.ц.п., срабатывание которых всегда происходит одновременно. Таким образом, FIFO оказывается заполнен последовательностью из пар или четверок 16-битовых данных, соответствующих периодическим срабатываниям двух или четырех 16-битовых а.ц.п.
Кроме передачи данных драйвер P25M для операционной системы Windows обеспечивает также начальную “заливку логики” п.л.и.с. в б.с.в.а.д. через тот же канал PCI, общий для б.с.в.а.д. и п.к. Эта “заливка логики” (собственно электрической схемы соединений в цифровой схеме сбора и накопления аналоговых данных) требуется каждый раз после включения питания в компьютере, и затем плата может функционировать до выключения питания. Плата P25M в принципе допускает перепрограммирование цифровой схемы (редактирование “заливаемой логики”) с помощью компилятора логики Xilinx, предоставляемого изготовителем микросхем Spartan-3 фирмой Xilinx. Однако эта “принципиальная схема” и детали ее логических узлов, разработанных Innovative Integration, плохо документирована, так что у нас возникли непреодолимые трудности с перепрограммированием логики п.л.и.с. на произвольную выбранную нами схему. Впрочем, для выполнения наших задач базового набора функций, заложенных в предоставляемую Innovative Integration стандартную логику п.л.и.с. б.с.в.а.д., как правило, вполне достаточно.
Кроме этого, после включения питания требуется “залить” в б.с.в.а.д. управляющую его работой программу. Эта возможность тоже обеспечивается драйвером PCI-интерфейса, установленным на п.к. в операционной системе Windows. Программа, написанная на C++ и скомпилированная с помощью средств, предоставленных изготовителем CPU б.с.в.а.д. фирмой Texas Instruments Inc., тоже представляет собой файл данных, которые с помощью соответствующих функций драйвера канала связи PCI можно передать в б.с.в.а.д. перед началом его работы.
В качестве источника когерентного света нами в установке был использован ${}^{{13}}{\text{C}}{}^{{16}}{{{\text{O}}}_{2}}$-лазер Merit-G (Laser Access), перестраиваемый с помощью дифракционной решетки в диапазоне оптических частот 880–936 см–1 (длины волн 11.36–10.68 см–1). Его выходная мощность достигает 2 Вт на сильных линиях, и поэтому мы использовали аттенюатор Lasnix, использующий в качестве ослабляющих (рассеивающих свет) элементов решетки-подложки для электронной микроскопии. Растровое сканирование поверхности образца с топографической обратной связью в режиме а.с.м. TappingMode, вибрацию кантилевера с зондирующей иглой и запись на диск п.к. изображения продетектированного нами ASNOM-сигнала обеспечивал контроллер R9 для микроскопа сканирующего зонда (RHK, Inc.).
В качестве фотоприемника мы использовали охлаждаемый до температуры жидкого азота фоторезистивный детектор J15D12-M204-S100U-60 площадью 100 × 100 мкм2 производства Judson. Согласно паспорту его полоса частот составляет 1 МГц. Непосредственно рядом с фотодетектором размещен малошумящий предусилитель [24], коэффициент усиления которого разумно установить в диапазоне от ×100 до ×2000 в зависимости от фактического размаха выходного электрического сигнала.
ОПТИЧЕСКОЕ ГОМОДИНИРОВАНИЕ
В изображенной на рис. 1 схеме оптического гомодинирования на основе интерферометра Майкельсона электрический сигнал пропорционален квадрату амплитуды ${{E}_{{pad}}}$ суммарного электромагнитного поля волн, падающих на чувствительную площадку фотодетектора. Комплексные амплитуды этих двух волн изображены на рис. 1 фазорами ${{E}_{{scatt}}}$ для волны, рассеянной иглой, и ${{E}_{{ref}}}$ для волны, пришедшей из опорного плеча интерферометра. В случае, когда луч лазера, используемого для возбуждения оптических колебаний в зондирующей игле и окружающей ее области поверхности, когерентен, можно считать, что фаза оптических колебаний в луче, попавшем на детектор в результате рассеяния на игле, и в луче, попавшем на фотодетектор в результате отражения от зеркала, расположенного в опорном плече, зависит только от оптической длины этих каналов и от характера ближнепольного взаимодействия зондирующей иглы с поверхностью.
Квадрат модуля амплитуды Epad= Eref + Escatt (фазор поля – это вектор на комплексной плоскости) может быть описан выражением:
(1)
$\begin{gathered} {\text{|}}{{{\mathbf{E}}}_{{pad}}}{{{\text{|}}}^{2}} = ({{{\mathbf{E}}}_{{ref}}} + {{{\mathbf{E}}}_{{scatt}}})({\mathbf{E}}_{{ref}}^{*} + {\mathbf{E}}_{{scatt}}^{*}) = {{{\mathbf{E}}}_{{ref}}}{\mathbf{E}}_{{ref}}^{*} + \\ \, + ({{{\mathbf{E}}}_{{ref}}}{\mathbf{E}}_{{scatt}}^{*} + {\mathbf{E}}_{{ref}}^{*}{{{\mathbf{E}}}_{{scatt}}}){\text{ }} + {{{\mathbf{E}}}_{{scatt}}}{\mathbf{E}}_{{scatt}}^{*}. \\ \end{gathered} $Два члена Eref${\mathbf{E}}_{{ref}}^{*}$ и Escatt${\mathbf{E}}_{{scatt}}^{*}$ соответствуют квадратам модуля амплитуд полей рассеянного иглой и опорного лучей. Им был бы пропорционален фототок в случае, если бы они попадали на фотодетектор по отдельности. С учетом того, что мощность рассеянного иглой света на много порядков ниже, чем мощность луча, отраженного светоделителем в опорное плечо интерферометра, член Eref${\mathbf{E}}_{{ref}}^{*}$ играет подавляющую роль в возникновении фототока детектора. Отметим, что при стабильной мощности лазера этот член в выражении задает лишь значение постоянного тока, возникающего в детекторе. Без интерференции лучей полезный сигнал SNOM определялся бы величиной члена Escatt${\mathbf{E}}_{{scatt}}^{*}$ и был бы исчезающе мал. В случае интерференции этих двух лучей сигнал определяется произведением большого по модулю и постоянного по величине фазора Eref и маленького по модулю фазора Escatt
где φ – угол разности фаз между рассеянной и опорной волнами. Видно, что при оптимальной (нулевой) разности фаз вариации фототока благодаря интерференции оказываются больше, чем в случае обычного детектирования рассеянного иглой сигнала в ${{E}_{{ref}}}{\text{/}}{{E}_{{scatt}}}$ раз. Это означает, что слабые изменения сигнала, вызванные изменением амплитуды рассеянной на игле волны (которая и без того слаба), приводят все же к заметным изменениям в величине регистрируемого фототока.Кривая подвода – зависимость переменной составляющей фототока от расстояния игла–поверхность – приводилась нами в [25]. Фототок, постоянный при большой величине зазора игла–образец, претерпевает резкое изменение при расстоянии игла–образец порядка 20 нм и менее. Это при типичном размахе вертикальных колебаний острия 80–150 нм вызывает появление резких пиков на осциллограмме сигнала (рис. 1в), длительность которых составляет 10–20% от периода “вертикальных” колебаний иглы. Возможно несколько подходов к выделению ближнепольной компоненты сигнала в этом фототоке. Самый простой состоит в том, чтобы выделить одну из высших гармоник частоты вертикальных колебаний острия. Первая гармоника плоха тем, что содержит заметную интерференцию между оптическим сигналом от самой иглы и от ее отражения в поверхности; по большей части этот сигнал не имеет отношения к ближнепольному взаимодействию поверхность–острие. Второй вариант подхода состоит в том, чтобы в качестве сигнала записать площадь наблюдаемого импульса. В этом случае вклад в накопление дадут все гармоники сигнала, однако фаза рассеянной иглой волны тоже зависит от расстояния игла–образец. Это означает, что при суммировании точек в комплексных числах возникнут неоднозначности, зависящие от произвола в выборе алгоритма суммирования и формы строба.
Как упоминалось выше, согласно формуле (2), выделенный в качестве ближнепольной компоненты сигнал зависит синусоидальным образом от фазы световой волны, пришедшей из опорного плеча интерферометра. Фазовая модуляция гомодинирующего луча (при соответствующем учете фазы) позволит получить полную информацию об амплитуде и фазе ближнепольного сигнала рассеяния света зондирующей иглой.
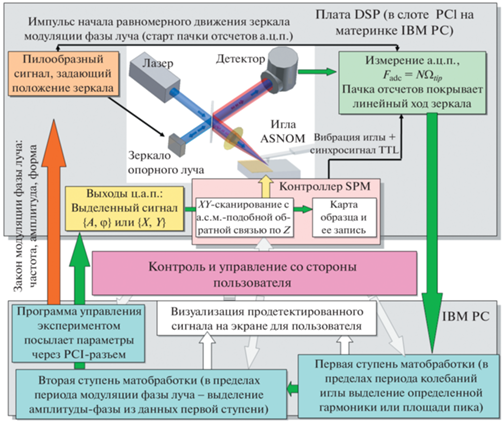
Блок-схема алгоритмов цифрового выделения сигнала ASNOM при оптическом гомодинировании волн света, рассеянных зондирующей иглой, представлена на рис. 2.
В использованной нами гомодинной конфигурации оптического детектирования требуется, таким образом, две хорошо разделимых процедуры обработки данных. Математическую процедуру выделения ближнепольных компонент в фототоке за один период частоты колебаний иглы, проделанную внутри одного периода, мы ниже намерены называть первичной обработкой сигнала, а дальнейшее выделение в массиве результатов первичной обработки синусоидальной компоненты, обусловленной модуляцией опорной фазы, мы будем называть вторичной матобработкой.
УПРАВЛЕНИЕ ПЕРЕМЕЩЕНИЕМ ЗЕРКАЛА ОПОРНОГО ПЛЕЧА
В системе гомодинного детектирования света, рассеянного иглой (основанной на схеме Майкельсона), модуляция фазы опорного сигнала обеспечивается периодическим перемещением зеркала в опорном плече интерферометра вдоль оптической оси плеча. С учетом задержки распространения света в опорном плече фаза вернувшейся на детектор волны зависит от координаты $z$ зеркала как:
где φ0 – дополнительная фаза, зависящая от различия длин сигнального и опорного плеч интерферометра (ее абсолютное значение неподвластно экспериментатору, но, по крайней мере, оно сохраняется неизменным в течение эксперимента, если установка механически стабильна), а ${{\lambda }}$ – длина волны используемого лазерного света. Цифра 2 в числителе рядом с координатой $z$ соответствует тому факту, что луч света проходит до зеркала по опорному плечу дважды: туда и обратно.Если положение $z(t)$ зеркала меняется во времени по синусоидальному закону z(t) = ${{z}_{0}}{\text{cos}}({{{{\omega }}}_{{\bmod }}}t)$, фаза волны опорного луча меняется по закону:
(4)
${{\varphi }_{{ref}}} = {{\varphi }_{0}} + 2{{\pi }}\frac{{2{{z}_{0}}\cos ({{{{\omega }}}_{{\bmod }}}t)}}{{{\lambda }}},$(5)
$\Delta {{I}_{{\det }}}\sim 2{{E}_{{ref}}}{{E}_{{scatt}}}\cos \left( {{{\varphi }_{0}} + 2{{\pi }}\frac{{2{{z}_{0}}\cos ({{{{\omega }}}_{{\bmod }}}t)}}{{{\lambda }}}} \right).$Косинус от косинуса – довольно неудобная функция для выделения в ней математической обработкой интересующего нас полезного сигнала на стадии вторичной обработки.
Синусоидальное перемещение зеркала имеет с точки зрения выделения сигнала еще один недостаток: скорость перемещения зеркала вблизи мертвых точек (макушек синусоиды) мала, а в центре рабочего хода – велика. Это приводит к тому, что точки первичной обработки (высшие гармоники в пределах каждого периода колебаний иглы), записанные с постоянной частотой оцифровки, окажутся записаны преимущественно с крайними значениями фазы опорного сигнала. Густое расположение измеренных точек в одной (двух симметричных) областях окружности на комплексной плоскости при редком расположении измеренных точек на остальных областях приведет к непредсказуемым ошибкам детектирования сигнала и сложной логике установления отношения сигнал/шум. Эта проблема в принципе может быть решена переменной частотой оцифровки сигнала фототока. Однако технически изменение самой частоты срабатывания а.ц.п. может привести к нестабильности получения результатов, а программный выбор “хороших” точек из массива собранных с постоянной частотой отсчетов требует значительного увеличения частоты работы а.ц.п. и усложнения алгоритмов обработки данных.
С учетом этого координата зеркала в эксперименте по выделению ASNOM-сигнала с переменной фазой гомодинирующего луча должна меняться во времени по пилообразному закону. В мертвых точках резкий разворот зеркала вызовет удары, которые могут возбудить продольные и угловые колебания крепления зеркала на подвижке, нарушив тем самым юстировку оптической схемы интерферометра. Чтобы исключить эти помехи, желательно скруглить кривую перемещения в точках разворота. В нашем случае для этого используются фрагменты синусоиды, состыкованные по производной с линейными участками движения с постоянной скоростью. Разумеется, фрагменты плавного разворота движения зеркала увеличивают полный рабочий ход, и это следует учитывать при организации измерений.
Массив данных, определяющих форму закона колебаний зеркала опорного плеча, представляющий собой последовательность 16-битовых чисел, загружается в б.с.в.а.д. в FIFO-очередь п.л.и.с., управляющей работой цифроаналоговой части электроники б.с.в.а.д. Тактовую частоту вывода загруженных в массиве значений на ц.а.п. задают путем записи соответствующего значения в регистры п.л.и.с. в адресном пространстве б.с.в.а.д. После инициализации закона колебаний никаких дальнейших вмешательств в работу п.л.и.с. и ц.а.п. более не требуется до выключения системы. При опустошении в FIFO очереди данных для ц.а.п., п.л.и.с. вызывает в б.с.в.а.д. прерывание, и обработчик загружает новую порцию данных в FIFO.
Физически перемещение зеркала опорного плеча осуществляется с помощью пьезопозиционирующего столика S-316 (Physik Instrumente GmbH) [26, 27]. Столик с тремя пьезостеками оборудован датчиками обратной связи, сигнал с которых обрабатывается в модуле E-503 (Physik Instrumente GmbH) [28]. В качестве входного аналогового сигнала на этот модуль подается сигнал с выходного разъема ц.а.п. б.с.в.а.д. Ц.а.п. выдает сигнал с диапазоном напряжений –2.5…+2.5 В. Для модуля E-503 требуется на входе диапазон управляющих сигналов от –12 до +12 В. Для преобразования уровня сигнала мы использовали самодельный каскад усилителя напряжения с регулируемым сдвигом по уровню (рис. 3). Аналоговые цепи на плате P25M гальванически изолированы от цифровых цепей шины PCI персонального компьютера. Питание усилителя осуществляется через самодельный источник питания на основе микросхем JCA0605D02, преобразующих питание +5 В цифровых цепей компьютера в биполярную пару напряжений ±15 В относительно гальванически изолированной земли. С целью предотвращения проникновения помех по цепям питания непосредственно на плате усилителей установлены электронные фильтры на микросхемах линейных стабилизаторов напряжения LM7812/LM7912. Цепь заземления подключается к предусилителю через корпус сигнального разъема, и это позволяет избежать приема магнитных наводок через паразитную петлю земли. Аналогичная четырехканальная плата усилителей используется нами и для входов а.ц.п. Это позволяет защитить электронику дорогой процессорной платы P25M от повреждения при перегрузках, вызванных статическим электричеством в момент подключения, чрезмерным размахом входного сигнала или коротким замыканием в выходных цепях. В таком случае выйдут из строя сравнительно дешевые микросхемы предусилителей, которые нетрудно заменить.
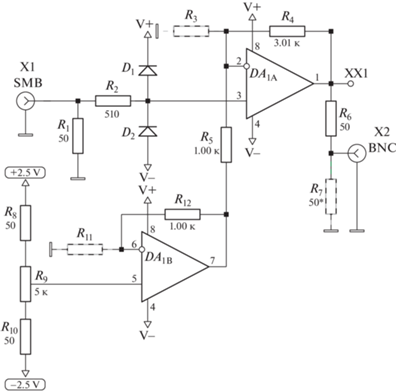
Рис. 3.
Усилительный каскад со сдвигом уровня напряжения, используемый для преобразования диапазона напряжений выхода ц.а.п. –2.5…+2.5 В к диапазону входных напряжений блока E-503, управляющего положением зеркала в опорном плече. Для передачи входных сигналов используется аналогичная 4-канальная плата, в которой добавлены компоненты (показаны штриховыми линиями). DA1 – AD8034; D1, D2 – FJH1100.
В принятой идеологии сбора и обработки сигнала достоверное значение измеренной амплитуды и фазы оптического сигнала появляется на выходе системы каждый раз по окончании периода колебаний модулирующего фазу зеркала. В случае независимой обработки данных от прямого и обратного хода зеркала возможна выдача результата каждые полпериода колебаний зеркала, хотя с учетом неидеальности работы пьезостеков эти два сигнала и различаются между собой. Таким образом, быстродействие детектирующей системы в целом определяется частотой возвратно-поступательных движений зеркала. Повышение этой частоты, однако, ограничено определенными требованиями. Во-первых, эта частота должна быть много меньше частоты колебаний кантилевера в сканирующей головке ASNOM. В этом случае выделение высших гармоник в фототоке (первичное детектирование) возможно в предположении неизменности фазы опорного луча (зеркало в схеме Майкельсона неподвижно). Кроме того, выделение синусоидальной зависимости от фазы опорного луча (от положения зеркала) во вторичном детектировании будет тем корректнее, чем больше точек накоплено в результате первичного детектирования. Частота колебаний иглы зависит от жесткости кантилевера используемой модели зондов и обычно лежит в области ftip = 30–300 кГц. С учетом этого минимальное достаточное число периодов колебаний иглы за проход зеркала составляет (ftip = 30 кГц, N = 2 хода × 16 колебаний) около одного килогерца, а в оптимистическом случае высокочастотного кантилевера допустимая частота колебаний зеркала может доходить до десятка килогерц. Второе ограничение обусловлено механической жесткостью и стабильностью самого пьезопозиционирующего столика S-316. Как утверждается фирмой-изготовителем, частота первого механического резонанса столика составляет 5.5 кГц. Однако даже установка легкого зеркала Thorlabs PF-05-03-01 (∅ 12 мм) делает невозможной корректную работу столика начиная с частоты 120 Гц. В нашем случае мы наклеивали в качестве зеркала позолоченную полированную кремниевую подложку толщиной 400 мкм, и это позволило повысить частоту колебаний зеркала до 350 Гц. Дальнейшее повышение частоты возвратно-поступательного движения зеркала приводит к возникновению на осциллограмме колебаний сигнала, соответствующих второй-третьей гармонике частоты перемещения зеркала, и, по нашему мнению, объясняется нарушением поперечной юстировки луча в опорном канале.
СБОР ЦИФРОВЫХ ДАННЫХ
Электрический сигнал с фотоприемника преобразуется в массив цифровых данных путем запуска серии измерений а.ц.п. (фрейма), покрывающей во времени целиком линейный участок закона перемещения зеркала опорного плеча. Частота отсчетов а.ц.п. выбирается заметно большей частоты колебаний кантилевера с иглой ${{F}_{{sampling}}} = \{ 16...128\} {{f}_{{tip}}}$, и это обеспечивает достаточную точность при измерении амплитуды высших гармоник частоты ${{f}_{{tip}}}$ в спектре фототока. Разумеется, эта частота оцифровки устанавливается кратной частоте ${{f}_{{tip}}}$, чтобы обеспечить совершенно одинаковые условия оцифровки разных периодов колебания иглы в длинном пакете данных, и таким образом избежать возникновения искажений типа муара. Наличие в схеме платы P25M системы фазовой автоподстройки частоты (ф.а.п.ч.) с дробным заданием частоты обеспечивает высокую точность (доли герца) установки фактической частоты оцифровки. Теоретически рассуждая, нестабильная работа микросхемы ф.а.п.ч. может привести к нестабильности фактического момента срабатывания а.ц.п., однако в нашем случае (плата P25M, диапазон частот оцифровки 100 кГц–3 МГц) этого не происходило.
Параметры фрейма – пакета отсчетов а.ц.п. (число точек оцифровки, частота оцифровки, тип запуска, полярность запускающего сигнала) задаются перед запуском накопления пакета однажды, путем записи соответствующих значений в регистры п.л.и.с. Xilinx Spartan-3, доступные в адресном пространстве б.с.в.а.д. его процессору Texas Instruments TMS320C6713. Программный запуск накопления производится по началу линейного участка пилообразного движения зеркала. Это нетрудно организовать, поскольку генерация пилообразного напряжения на ц.а.п. и управление работой а.ц.п. обеспечиваются программными процессами в общем для них пространстве б.с.в.а.д. После программного запуска накопления непрерывная последовательность отсчетов а.ц.п. аппаратно начнется в момент прихода на плату по кабелю синхроимпульса TTL, имеющего частоту колебаний иглы и привязанного по фазе к возбуждающему эти колебания сигналу в контроллере. Во избежание проблем с землями описываемой системы и контроллера сканирующего зондового микроскопа (с.з.м.) входной TTL-синхросигнал от контроллера гальванически изолирован от входа платы P25M с помощью микросхемы развязки IL715, получающей на свои входную и выходную части гальванически отвязанные от земли компьютера напряжения питания +5 В. Вход синхросигнала платы P25M имеет входное сопротивление 50 Ом, так что нам пришлось установить на выходе преобразователя TTL-сигнала буферный p-MOSFET-транзистор NPF5P03. Вид запуска (автоколебательный или ждущий), а также полярность запускающего перепада задается перед началом накопления на шине данных б.с.в.а.д. путем записи соответствующих битов в регистр состояния схемы управления а.ц.п., расположенный в п.л.и.с. В результате записанная во фрейме данных а.ц.п. последовательность отсчетов оказывается точно привязана по фазе к первому колебанию кантилевера, случившемуся после программного разрешения накопления потоковых данных в а.ц.п. (после начала линейного участка хода зеркала).
Другой электрический сигнал, записываемый одновременно с помощью другого канала а.ц.п., подается на вход б.с.в.а.д. с датчика вертикального отклонения кантилевера (положения иглы) в сканирующей головке ASNOM. Номинально считается, что будто система обратной связи по высоте, работающая в режиме TappingMode, полностью стабилизирует амплитуду и фазу вынужденных колебаний иглы, с учетом ее столкновений с поверхностью образца в нижней точке колебания. Между тем, фактический момент “удара” острия о поверхность, соответствующий моменту возникновения ближнепольного импульса в фототоке, может заметно изменяться в пределах периода колебаний. Одновременная запись фактического положения зондирующей иглы по отношению к поверхности образца позволит в дальнейшем скорректировать вычисленную фазу оптического сигнала рассеянного иглой ASNOM посредством вычитания из нее фактической фазы колебаний кантилевера. В случае, если величина импульса ближнепольного сигнала определяется путем стробирования, точное знание фазы колебаний иглы позволит скорректировать положение строба по отношению к данным.
После окончания оцифровки пакета на шине б.с.в.а.д. возникнет соответствующее прерывание, драйвер передачи данных в режиме прямого доступа к памяти перекачает эти данные в оперативную память и процессор б.с.в.а.д. пошлет полученный пакет в п.к. по общему для них каналу PCI. Аппаратура P25M допускает накопление данных с одной или двух пар а.ц.п., однако следует учитывать, что при конечной скорости передачи данных через интерфейс PCI использование двух пар а.ц.п. вместо одной снижает вдвое скорость передачи данных из б.с.в.а.д. в п.к.
Можно, однако, отметить, что третий (и четвертый) из имеющихся четырех а.ц.п. можно использовать для записи сигнала, управляющего положением зеркала интерферометра, как того, который подается с нашего ц.а.п. на вход усилительного блока E-503, так и идущего в блок сигнала с датчика обратной связи пьезопозиционера. Программа в п.к., работающая под управлением операционной системы Windows, включает в себя виртуальный осциллограф, позволяющий контролировать электрические и цифровые процессы, происходящие в описываемой системе измерения. В случаях, когда это позволяет скорость передачи данных, можно с целью контроля работы системы отображать на экране компьютера сигналы, соответствующие положению зеркала опорного плеча.
ВЫДЕЛЕНИЕ ASNOM КОМПОНЕНТЫ ФОТОТОКА В ПРЕДЕЛАХ ПЕРИОДА (ПЕРВИЧНОЕ ДЕТЕКТИРОВАНИЕ)
После того, как пакет цифровых данных, соответствующий по времени равномерному ходу зеркала опорного плеча интерферометра, попал в п.к., начинается цифровая обработка сигнала. Первым делом массив данных разбивается на фрагменты, соответствующие по длине периоду механических колебаний зондирующей иглы в перпендикулярном сканируемой поверхности направлении. Как отмечено выше, частота оцифровки кратна частоте колебаний иглы, поэтому временное положение измеренных а.ц.п. точек совершенно одинаково внутри периода колебаний на протяжении всего рабочего хода зеркала. Таким образом, можно надеяться на полное отсутствие ошибок измерения, обусловленных неточностью момента запуска измерения в а.ц.п. или муаровым эффектом.
Данные, полученные п.к. в виде пакета последовательных отчетов а.ц.п. в б.с.в.а.д., могут быть немедленно выведены на экран виртуального осциллографа (рис. 4).
Рис. 4.
Отображение на экране виртуального осциллографа данных, соответствующих различным этапам цифровой обработки сигнала: a – исходные данные (луч 1), полученные в виде пакета от а.ц.п. (хорошо виден пик, возникающий в момент касания Pt-иглой поверхности SiC, имеющей сильный ASNOM-отклик благодаря совпадению частоты решеточного резонанса SiC с оптической частотой излучения CO2-лазера; суммарная амплитуда этого пика в конце каждого периода колебаний иглы выводится также на экран (ступенчатая линия – луч 2, он же луч 3 в б); б – луч 3 – результат первичного детектирования из части (a) на протяжении всего полупериода колебаний модулирующего зеркала (координата зеркала отображена линейно нарастающим лучом 4), зависимость измеренного ближнепольного сигнала от времени (от положения зеркала) носит синусоидальный характер.

Целью первичной матобработки данных является выделение в каждом периоде колебаний иглы числа, соответствующего величине ближнепольного импульса изменения рассеяния света иглой в электрическом сигнале на выходе фотодетектора. Это может быть вычисленный поточечно “интеграл перекрытия” входного электрического сигнала со стробом, предположительно соответствующим по форме ожидаемому входному импульсу. Такой подход несомненно обеспечит максимальное отношение сигнал/шум в принимаемом сигнале, поскольку все гармоники частоты повторения импульса будут включены в результат накопления с оптимальными весами. Однако оказывается, что наблюдаемая форма импульсов, во-первых, свидетельствует о сильной зависимости их длительности от условий измерения: от амплитуды “вертикальных” колебаний зонда, от его формы (остроты), от материала исследуемой поверхности. Во-вторых, при “касании” иглой поверхности в ASNOM изменяется не только амплитуда рассеянной иглой световой волны, но также ее фаза. Это означает, что строб, используемый для выделения полезного сигнала, должен, по-видимому, выражаться массивом не действительных, а комплексных чисел. В-третьих, в присутствии неподвижных “пылинок” на поверхности неоднозначным является способ отделения импульса ближнепольного сигнала от синусоидального в целом сигнала интерференции волн, рассеянных иглой и ее отражением в поверхности образца. Таким образом, форма и длительность строба вносят некоторый произвол в итоговую величину выделенного полезного сигнала.
Незначительно уступает рассмотренному способу детектирования импульса ближнепольного оптического отклика простое выделение амплитуды одной из высших гармоник частоты колебаний иглы. Это приводит к некоторой потере данных, содержащихся в других гармониках, однако привлекает однозначностью способа, не допускающего произвола в назначении параметров детектирования. Умножение всех измеренных за период точек на синусоиду из таблицы, длина которой соответствует числу измерений а.ц.п. на период колебаний, в принципе должно дать действительный результат. Между тем общность метода не сильно пострадает, если вычисления проделывать в комплексных числах, умножая отсчеты а.ц.п. и на синус, и на косинус выбранной частоты. Объем вычислений определяется всего лишь числом используемых точек разбиения периода, и умножение всех точек на синусоиду одной-единственной частоты не требует сложных оптимизаций вычислений, например быстрого преобразования Фурье [29], как это необходимо при вычислении полного спектра.
Одновременно с вычислением амплитуды и фазы одной из высших гармоник частоты колебаний иглы в сигнале фотодетектора программа вычисляет фазу механических колебаний зондирующей иглы. Для этого используются данные, одновременно полученные другим а.ц.п. из имеющихся в б.с.в.а.д., к которому подключен сигнал механического отклонения кантилевера, идущий из сканирующей головки ASNOM.
Определенную некорректность в вычислении гармоники вносит средний наклон и кривизна измеренной “осциллограммы” данных в пределах периода. Вносимые искажения и их коррекция будут рассмотрены ниже. Они играют заметную роль обычно в случае, когда полезный сигнал уже слишком слаб.
Результатом вычислений первичного детектирования является массив чисел, каждое из которых соответствует одному периоду механических колебаний иглы. Длина этого массива соответствует числу колебаний, совершенных кантилевером за время равномерного движения зеркала интерферометра, модулирующего оптическую фазу луча в опорном плече интерферометра Майкельсона.
УСРЕДНЕНИЕ РЕЗУЛЬТАТА ПО ВСЕМ ФАЗАМ ГОМОДИНИРУЮЩЕГО ЛУЧА (ВТОРИЧНОЕ ДЕТЕКТИРОВАНИЕ)
В случае, когда модулирующее фазу опорного луча зеркало движется в ходе рабочего хода равномерно (его координата и, следовательно, фаза луча изменяются линейно во времени), можно полагать, что измеренный сигнал зависит от времени синусоидальным образом. Период механических колебаний иглы неизменен, так что номер (индекс) точки в массиве результатов первичного детектирования фактически эквивалентен времени. Как видно на рис. 4б, последовательно выведенные значения амплитуды второй гармоники в каждом периоде действительно образуют на экране виртуального осциллографа синусоиду. Изображенный на той же “осциллограмме” сигнал управления положением модулирующего фазу зеркала, измеренный одновременно с оптическим сигналом, позволяет убедиться, что движение зеркала в интерферометре Майкельсона во время измерения действительно было равномерным.
Вторичное детектирование состоит лишь в том, чтобы вычислить амплитуду и фазу синусоиды, образованной результатами последовательных попыток первичного детектирования.
Разумеется, необходимо задать такую длину массива выходных данных первичного детектирования и такую физическую амплитуду колебаний зеркала, чтобы длина массива данных, над которыми выполняется во вторичном детектировании операция выделения амплитуды и фазы синусоиды, в точности соответствовала бы периоду интерференционных биений, определяемому длиной волны света используемого лазера. При используемой нами в эксперименте длине волны около 11 мкм соответствующая амплитуда колебаний зеркала вдоль оптической оси опорного плеча должна составлять около 5.5 мкм.
Аналогичную операцию выделения синусоиды интерференционных биений можно (и нужно) проделать над данными, соответствующими обратному ходу модулирующего зеркала. Направление вращения фазора амплитуды электромагнитного поля ${{E}_{{ref}}}$ на комплексной плоскости окажется в этом случае противоположным, и это следует учесть, сменив знак индекса в обрабатываемом массиве данных. Кроме того, неидеальности пьезокерамики приводят к отличию фактической скорости перемещения зеркала на разных участках прямого и обратного хода. В силу этого суммирование данных прямого и обратного хода имеет смысл производить только в самом конце алгоритма детектирования ASNOM-сигнала.
Данные, полученные таким образом, передаются в контроллер с.з.м., управляющий сканированием поверхности. Предпочтительна программная передача данных по сети, однако плата P25M имеет три свободных выхода ц.а.п. (один из 4 выходов занят передачей управляющего напряжения на зеркало опорного плеча), и описываемая программа сбора-обработки данных вполне способна вывести значения амплитуды и фазы на два из этих ц.а.п. с целью их передачи в контроллер с.з.м. в аналоговом виде. Для визуального восприятия удобна форма представления амплитуда/фаза на экранах изображения поверхности. Для последующего усреднения удобнее передача данных в форме двух квадратур. В противном случае, при фазе сигнала около 180° шум в сигнале будет приводить к усреднению данных со значением около 0°, совершенно неадекватным фактической фазе.
Следует отметить, что данные, соответствующие выделенному в среднем ASNOM-сигналу, появляются на выходе программы (и напряжение сигнала на выходе ц.а.п.) только в конце рабочего хода зеркала. При частоте перемещения зеркала 200 Гц данные на выходе системы обработки требуют для накопления 2.5 мс и еще некоторого дополнительного времени для вычислений. Это означает, что изображение ближнепольных свойств поверхности сдвинуто на экране п.к. контроллера с.з.м. относительно ее топографического изображения на расстояние, соответствующее этой задержке и скорости сканирования.
СИНХРОНИЗАЦИЯ ПРОЦЕССОВ НАКОПЛЕНИЯ И ОБРАБОТКИ ДАННЫХ
С точки зрения программиста операции запуска работы а.ц.п. в пакетном режиме, пакетного приема полученных цифровых данных с них, предварительной обработки принятого массива, передачи данных из б.с.в.а.д. в п.к., а также идущие в п.к. процессы приема массива данных, их первичная и вторичная матобработка (вычисление высших гармоник частоты механических колебаний иглы в спектре фототока и последующее выделение в массиве вычисленных гармоник синусоидальной компоненты, обусловленной модуляцией оптической фазы опорного луча) являются отдельными потоками вычислений идущими в многопоточных средах б.с.в.а.д. и п.к.
Эти потоки “вычислений” обеспечиваются методами Execute() класса Thread из библиотек б.с.в.а.д. и п.к. (управляющие программы в обоих пространствах написаны на языке C++). Все классы, обеспечивающие работу управляющих программ (запуск цифрового накопления в а.ц.п., прием полученных от них данных из FIFO п.л.и.с., управление колебаниями зеркала в опорном плече, обработка принятых массивов данных) являются потомками класса Thread. Перекрытый в них метод Execute() представляет собой цикл, завершающийся обычно только при уничтожении экземпляра класса в момент закрытия программы. Параметры работы (например, длина пакета оцифровки а.ц.п., частота оцифровки, число используемых а.ц.п.) передаются в класс через вызов функций-членов каждого класса, и благодаря им копия новых параметров остается лежать в локальных переменных класса. Эти новые значения параметров устанавливаются не мгновенно. В некоторый момент непрерывно работающий метод Execute() обнаруживает приход новых параметров и вот тогда он совершает необходимые изменения в работе аппаратуры. Такая логика работы позволяет нам дать процессу завершить единый блок вычислений/измерений целиком со старыми параметрами и только по окончании процедуры заняться изменением параметров будущих вычислений/измерений.
Различные потоки вычислений, принадлежащие экземплярам разных классов, работают в программном пространстве б.с.в.а.д. и п.к. “одновременно” в соответствии с приоритетом, сообщаемым операционной системе при их запуске. Для временной приостановки работы потока, не функционального в настоящий момент, используются семафоры. При обнулении счетчика занятости семафора вызов метода Acquire() семафора передает управление операционной системе (приостанавливает работу потока), и возврат из подпрограммы Acquire() произойдет только после того, как в каком-то другом месте программы семафор зарядят вновь вызовом его функции-члена Release(). Этот вызов содержится во всех методах передачи классу внешних данных и команд: установив в переменной класса флаг прихода соответствующей информации (например, свежего пакета данных), метод перед возвратом вызывает Release() семафора, управляющего работой этого экземпляра класса.
Команду “Начать потоковый ввод а.ц.п.” написанный нами класс FramedAdcThread, работающий в пространстве б.с.в.а.д., получает в момент начала линейного участка в массиве данных, последовательно посылаемых на ц.а.п. другим (тоже самодельным) классом DacServo. Последний активизируется по прерыванию в момент опустошения буфера FIFO, куда загружается очередная последовательность значений для ц.а.п., образующая закон колебаний модулирующего зеркала во времени. Последовательность команд в обработчике прерываний процессор б.с.в.а.д. выполняет с “ограниченными правами”, и поэтому вызов функций-членов системного объекта Innovative::Semaphore нежелателен. С задачей хорошо справляется объект Innovative::Mailbox, предоставленный библиотеками фирмы-изготовителя. После пересылки очередного массива данных в FIFO для ц.а.п. класс DacServo записывает бит готовности в Mailbox и снова “погружается в сон”, а класс сбора с а.ц.п. оцифрованных данных FramedAdcThread, дождавшись изменения состояния Innovative::Mailbox, сможет тогда запустить накопление фрейма данных в а.ц.п. После этого FramedAdcThread::Execute() тоже приостановит работу, вызвав системный метод AdcStream::Get(). Этот поток получит снова управление по окончании накопления пакета данных на а.ц.п., поскольку только тогда произойдет выход из вызванной им подпрограммы AdcStream::Get(). На самом-то деле вызов AdcStream::Get() не обязательно блокирующий: в параметрах библиотечного класса можно установить максимальное время ожидания, и в случае какого-то непредусмотренного заедания процесса в п.л.и.с. (например, обрыв кабеля с синхроимпульсами от внешнего прибора) получить ненулевой код ошибки вызванной функции Get() в процессоре б.с.в.а.д. Мы при программировании ввода-вывода придерживались общепринятого стиля: нулевой возвращаемый функцией код означает полный успех, а ненулевые коды соответствуют неудачам различного сорта. Сами передаваемые данные читаются и записываются в буфер по адресу, переданному функциям ввода-вывода в структуре параметров операции (адреса буферов, режимы, способ сообщить об удачном или неудачном завершении операции…).
Некоторые программные операции требуют порой времени, многократно большего, чем длительность типичного цикла работы (таковым в системе является период возвратно-поступательного колебания модулирующего фазу зеркала). В этом случае вычислительному потоку разумно поручить эту деятельность другому потоку невысокого приоритета, а самому продолжить основную работу. Это позволяет избежать приостановки выполнения важных операций (например, управления колебанием зеркала или выводом продетектированного значения сигнала в обработанных данных на вход контроллера с.з.м.). Например, изменение параметров колебания зеркала (размаха, постоянной составляющей, частоты колебаний) требует заполнения нового массива данных, предназначенных в дальнейшем для регулярной загрузки в FIFO-очередь п.л.и.с., обеспечивающей их передачу на ц.а.п. Пока этот массив не заполнен, система продолжает передавать на пьезостеки зеркала напряжение по старому закону колебаний. Благодаря этому модулирующее фазу зеркало никогда не останавливает своей работы.
Аналогично работа организована и в п.к. Долгие операции, например вывод данных на диск, поручают низкоприоритетному потоку вычислений, основная работа при этом продолжается, а выполнение медленных операций происходит незаметно для пользователя. Одновременно и в б.с.в.а.д., и в п.к. “работают” по 4-5 вычислительных потоков. Слово “работают” взято в кавычки, потому что процессор в каждой системе один, и физически он исполняет в каждый момент команды одного (наиболее приоритетного) потока, а выполнением команд менее приоритетных потоков процессор займется тогда, когда более приоритетные потоки вызовут функцию Acquire() своего семафора. Другой способ диспетчеризации выполнения вычислительных потоков состоит в вызове прерываний. Когда заканчивается, например, аппаратная пересылка данных по шине в режиме прямого доступа к памяти, аппаратура вызывает прерывание, и подпрограммы его обработки, совершив свои действия, могут в конце установить перед выходом из прерывания флаг готовности, разрешающий другим потокам возобновить свою работу.
Вычислительный поток, ответственный в п.к. за детектирование сигнала, активизирует свою работу по получении массива со свежими данными, накопленными а.ц.п. и переданными из б.с.в.а.д. по каналу PCI. После того как операции детектирования закончены (они состоят из первичной и вторичной математической обработки), результатом работы оказывается комплексное число (например, амплитуда и фаза продетектированной ASNOM-компоненты).
С целью синхронизации работы п.к. и б.с.в.а.д. предусмотрена пересылка между ними относительно коротких пакетов данных через PCI-интерфейс. Каждый пакет снабжен уникальным кодом сообщения и во многих случаях самого этого кода уже достаточно для передачи информации. Например, пакет с кодом ccAdcFrameJamOdd извещает б.с.в.а.д. о том, что программа в п.к. не способна пока обработать новый фрейм данных от а.ц.п., так что б.с.в.а.д. следует повременить с передачей новых данных. Пакет с кодом ccAdcFrameProcessedOdd, передаваемый из п.к. в б.с.в.а.д., наоборот, извещает, что обработка фрейма данных с а.ц.п., соответствующего нечетному (восходящему) полупериоду движения зеркала, полностью завершена и что п.к. полностью готов к приему новой порции данных. Аналогичный код извещает об окончании обработки фрейма данных а.ц.п., собранного за четный (нисходящий) полупериод колебаний зеркала. Эти сообщения позволяют избежать переполнения канала PCI и обеспечивают надежность совместной работы б.с.в.а.д. и п.к. даже в случае, когда п.к. недостаточно мощный, а объем вычислений слишком велик (например, при измерении спектра шума входного сигнала, требующего полного преобразования Фурье по всем гармоникам).
Разумеется, предусмотрены уникальные коды сообщений для пакетов данных, передаваемых через PCI-канал, которые содержат параметры предстоящего потокового накопления данных с помощью а.ц.п. (длина фрейма, частота оцифровки, способ запуска фрейма, полярность рабочего фронта синхросигнала и т.п.). Структуры данных, содержащие параметры возвратно-поступательных колебаний зеркала в интерферометре (размах, форму кривой, частоту), тоже передаются через PCI-канал в виде пакета с уникальным кодом сообщения.
ВЫВОД ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ ДЕТЕКТИРОВАНИЯ
Основным результатом работы программно-аппаратного комплекса выделения сигнала ASNOM является одно комплексное число, соответствующее амплитуде и фазе (или двум квадратурам) ближнепольных компонент в сигнале с фотодетектора на выходе гомодинирующего интерферометра. Это число может быть передано в контроллер, управляющий работой всего с.з.м. в целом, через сетевой кабель по IP-протоколу. Передаваемый пакет данных должен содержать одно комплексное или два действительных числа. Возможен упрощенный вариант: мы передаем его действительную и мнимую части (или амплитуду и фазу) в виде аналогового сигнала с помощью двух свободных каналов ц.а.п. б.с.в.а.д., и этот аналоговый сигнал контроллер с.з.м. записывает в сохраняемые данные карты сканируемой поверхности просто как дополнительный внешний сигнал. Для этого из п.к. в б.с.в.а.д. следует послать пару 16-битовых чисел, соответствующих разрядности ц.а.п.
ВИЗУАЛЬНАЯ ПАНЕЛЬ УПРАВЛЕНИЯ НАКОПЛЕНИЕМ
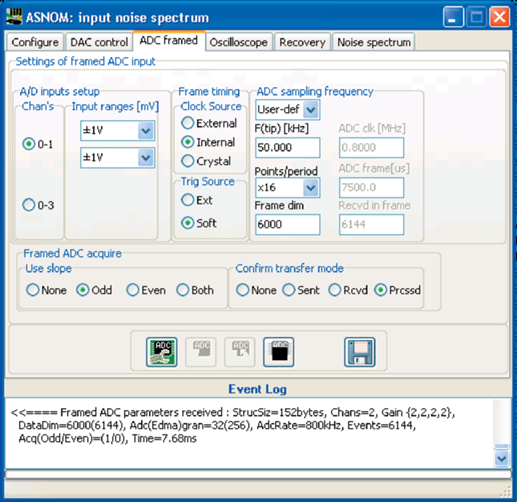
Ввод пользователем управляющих системой команд, а также вывод параметров состояния, выбор данных для индикации на виртуальном осциллографе осуществляется с помощью визуальной панели интерфейса с пользователем (GUI). Элементы отображения и управления сгруппированы на ней в несколько субпанелей, доступных с помощью закладок. Во всех субпанелях остается видимым общее для всех текстовое окно, в которое программа выводит текстовые сообщения о параметрах работы и о возникших при работе неполадках. Пример субпанели, отвечающей за режим работы а.ц.п., которая позволяет отображать и редактировать параметры сбора и передачи данных, приведен на рис. 5.
Рис. 5.
Пример вида панели GUI – вкладка для отображения и задания параметров работы а.ц.п. и режима передачи накопленных ими данных.
Субпанель параметров соединения п.к. и б.с.в.а.д. через PCI-интерфейс задает размер буфера для данных, номер управляемой платы P25M (если их в PCI-слотах на материнской плате установлено несколько), позволяет выбрать на жестком диске п.к. файлы логики п.л.и.с. и программы процессора б.с.в.а.д., чтобы загрузить их перед началом работы. При успешном завершении инициализации б.с.в.а.д. присылает в п.к. сообщение о готовности, и тогда субпанель автоматически переключается на следующую (в нашем случае, субпанель задания режима колебаний модулирующего зеркала в интерферометре). При запуске программы в п.к., она читает из ini-файла записанные при выключении параметры работы и после установления связи с б.с.в.а.д. устанавливает его режимы в соответствии с прочитанным из ini-файла. Перед закрытием программы она собирает параметры измерения/обработки данных и записывает их на диск в ini-файл. Таким образом, прибор придет при включении в то самое состояние, в котором его выключали.
Субпанель задания режима возвратно-поступательного движения модулирующего зеркала позволяет задать частоту, размах и форму закона колебаний зеркала. Дополнительно элементы управления позволяют контролировать длину используемого буфера для данных кривой закона перемещения, номер ц.а.п., используемого для управления модулирующим зеркалом, редактировать физические параметры управляемого пьезостолика с целью облегчения перевода параметров колебаний в длину волны, а также многое другое.
Имеются также субпанели управления параметрами выделения полезного сигнала, измерения спектрального состава сигнала и управления виртуальным осциллографом на экране п.к.
Виртуальный осциллограф вообще является очень полезным элементом в описываемом аппаратно-программном комплексе. Постоянное отображение данных, с достаточной для реального времени скоростью, позволяет не только наблюдать любой входной, промежуточный, усредненный, отфильтрованный или выходной сигнал в “правильном” режиме работы (оценивать силу входного сигнала, точность положения детектирующего строба, видеть фазу выходного сигнала), но и визуально обнаруживать явные отклонения режима работы от ожидаемого верного. Например, результат первичного детектирования (выделения компонент ближнепольного импульса фототока в пределах каждого периода) синусоидальным образом зависит от времени при линейном перемещении зеркала, модулирующего фазу. Отклонение наблюдаемой формы этого сигнала от синусоидальной может свидетельствовать о неправильной юстировке интерферометра, о неправильной поперечной моде излучения возбуждающего лазера или об одновременной работе двух продольных мод в нем. Неправильная “сшивка” синусоид между соседними периодами свидетельствует о несоответствии длительности фрейма данных длительности линейного участка этих колебаний или о несоответствии размаха механических колебаний зеркала рабочей длине волны лазера.
Программирование п.к. осуществлялось на языке C++, и в качестве визуальных элементов (окошек редактирования, кнопок, надписей, индикаторов прогресса) были в качестве основы использованы элементы, содержащиеся в библиотеках Embarcadero (бывший Borland). К сожалению, предоставляемые этими библиотечными элементами возможности весьма ограничены. Элемент редактирования текста параметра TEdit, например, не допускает в процессе ввода проверки нового текста на допустимость значения. Предполагаемая Embarcadero внутрипрограммная передача данных – процедурная (и тогда сложность программы растет пропорционально квадрату ее объема, поскольку модификация одних параметров обычно влечет в программах управления прибором коррекцию других), между тем как для больших программных проектов управления прибором предпочтительнее событийная (в этом случае сложность программы растет всего лишь пропорционально ее объему, поскольку тогда различные части программы могут самостоятельно прочитать из потока событий, что им поправить в своих параметрах). Мы организовали событийную передачу данных и команд между разными компонентами программы GUI, взяв в качестве образца диспетчер событий в борландовском Turbo Vision начала 1990-х годов.
ИЗВЕСТНЫЕ НЕДОСТАТКИ И ИСКАЖЕНИЯ
Спектральная плотность шумов
Спектр шума входа а.ц.п. приведен на рис. 6. Он записан при двух значениях полного размаха шкалы а.ц.п., задаваемого его предусилителем: 200 мВ и 2 В. Данные спектральной плотности шумов были записаны с помощью описываемой программы. Частота оцифровки была установлена равной 2Msps, длина фрейма была установлена равной 16 384 точкам (длительность 8.2 мс).
Рис. 6.
Спектры шума входного каскада а.ц.п., записанные при различных коэффициентах усиления входного каскада, соответствующих полному размаху шкалы входного сигнала 200 мВ (1) и 1 В (2). Цена деления а.ц.п. в режиме 1 В шкалы при 65536 ступеньках составляет 15 мкВ. Частота оцифровки 2 Msps.
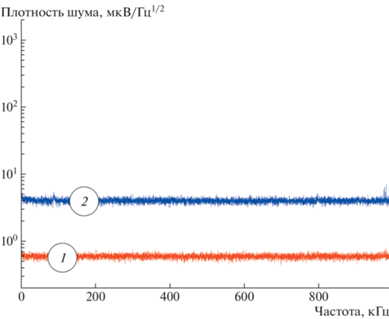
Для каждого фрейма данных вычислялся спектр с помощью процедуры быстрого преобразования Фурье, и квадраты спектральных амплитуд добавлялись в накопительный массив 50 раз. На экране виртуального осциллографа было видно, что приблизительно до 20 накоплений уровень спектрального шума падает по мере усреднения, а затем становится постоянным. По окончании накопления корень из среднего значения квадрата амплитуды каждой спектральной компоненты (среднеквадратичное значение) выводился на диск соответственно частоте. Видно, что уровень шума использованной цифровой платы ввода-вывода аналогового сигнала удовлетворительно низок. В пересчете на полную шкалу 1 В среднеквадратичная амплитуда шума для этого случая оказалась меньше, чем цена дискрета 16‑битового а.ц.п. для такой шкалы.
При совместной работе с описанным ранее предусилителем сигнала CdHgTe инфракрасного фотоприемника [24], установленным на коэффициент усиления $ \times 1000$, уровень шумов входа а.ц.п. используемой платы P25M не противоречит уровню шумов входа предусилителя, определяемому входными шумами использованной там микросхемы ADA4898-2 $(0.9\,{\text{нВ}}\sqrt {{\text{Гц}}} )$ и найквистовым шумом сопротивления фотоприемного элемента $\sqrt {\frac{{\bar {u}_{N}^{2}}}{{\Delta f}}} = 4kT{{R}_{{\det }}} \approx 0.48\frac{{{\text{нВ}}}}{{\sqrt {{\text{Гц}}} }}$.
Неидеальность пьезопозиционера зеркала в интерферометре
Возвратно-поступательное перемещение модулирующего фазу опорного луча зеркала в интерферометре обеспечивается путем подачи электрического сигнала на пьезостеки столика. Между тем, выясняется, что фактическое положение зеркала не соответствует подаваемому на пьезостеки напряжению. Рис. 7 представляет осциллограммы сигнала детектора на выходе интерферометра Майкельсона, записанные с использованием в качестве источника излучения He-Ne-лазера (${{\lambda }} = 0.633$ мкм) вместо CO2-лазера (${{\lambda }} \approx 11.2$ мкм). Головка ASNOM с объективом, фокусирующим лазерный луч на зондирующую иглу и затем собирающим рассеянное иглой излучение обратно в параллельный пучок, была в эксперименте заменена 100% отражающим зеркалом. Большое число периодов интерференционных биений, наблюдаемых на длине волны 633 нм, позволило нам точнее видеть на интерферограмме фактическое перемещение зеркала.
Рис. 7.
Сигнал фотодетектора Udet на выходе интерферометра Майкельсона (многократные синусоидальные биения) при периодическом перемещении зеркала опорного луча (напряжение Uφref, задающее положение зеркала вдоль оси). В сигнальный луч установлено 100%-ное зеркало, использован лазер с длиной волны 633 нм. Остановка зеркала происходит совсем не в мертвой точке управляющего напряжения. Рассогласование растет с увеличением частоты колебаний зеркала.
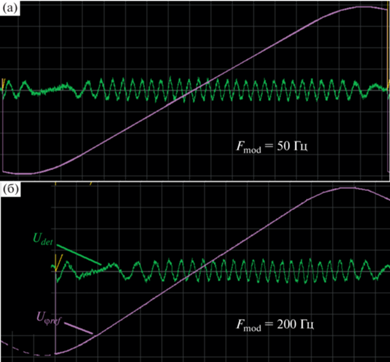
При умеренной частоте перемещения зеркала (рис. 7а) замирание биений происходит почти в моменты остановки управляющего положением зеркала электрического сигнала (на рис 7а это фрагмент пилообразного напряжения со скругленными верхушками). Увеличение частоты перемещения опорного зеркала приводит к заметному опозданию фактического положения зеркала по отношению к возбуждающему напряжению (рис. 7б). Кроме того, ухудшается линейность зависимости положения зеркала от времени. Эти искажения следует иметь в виду при задании рабочей частоты колебаний модулирующего зеркала в том случае, когда о его перемещении приходится судить вслепую: в отсутствие идеального зеркала в сигнальном плече и при работе на длине волны CO2-лазера.
Неидеальность вычисления гармоники
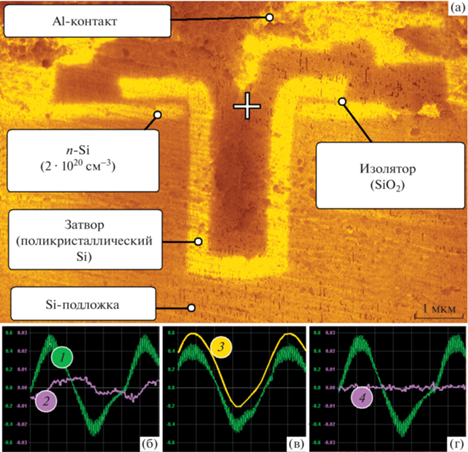
В случаях, когда на поверхности присутствуют объекты, сильно рассеивающие свет на рабочей частоте лазера (например, пылинки, металлические контакты или крошки полупроводника), они могут создать заметный сигнал интерференции с лучом опорного канала. Этот сигнал хотя и слаб, однако по уровню сравним с сигналом от зондирующей иглы. Разумеется, в нем нет (или почти нет) никаких следов от вертикальных колебаний зондирующей иглы. Он зависит в основном лишь от перемещения зеркала опорного плеча. Если такой яркий, хорошо рассеивающий свет, центр на поверхности один и находится в фокусе объектива, собирающего рассеянную иглой световую волну, сигнал на интерферограмме будет иметь синусоидальную форму. Если таких центров несколько и если они расположены не в фокусе объектива, интерферограмма будет иметь прихотливую форму, зависящую притом от перемещений образца при растровом сканировании поверхности. Подобная ситуация изображена на рис. 8. Математическая проблема возникает в процедуре первичного детектирования при избранном нами способе выделения высшей гармоники частоты вертикальных колебаний иглы ASNOM. При использовании фрагмента данных, в точности соответствующего по длине одному периоду колебаний зондирующей иглы, мы вычисляли значение второй (или третьей, четвертой) гармоники в таком фрагменте. Однако средний наклон данных (систематическое возрастание или убывание в пределах этого фрагмента данных) или их средняя кривизна приводит к возникновению среднего значения вычисленной гармоники даже в данных, не содержащих ни малейших следов модуляции сигнала колебанием иглы. Рис. 8б показывает случай, когда игла слегка (на 200–500 нм) отведена от поверхности, вариации интерференции между иглой и ее отражением в поверхности еще различимы на виртуальной осциллограмме, однако все высшие гармоники частоты колебаний иглы должны полностью отсутствовать в сигнале. Между тем, осциллограмма показывает несомненное наличие второй гармоники в детектируемых данных (луч 2). В случае, когда фотодетектор одновременно регистрирует слабый полезный сигнал и обсуждаемую помеху, результат детектирования окажется сильно искажен. Подавление этих паразитных сигналов возможно путем вычитания из реального входного сигнала его сглаженной копии (луч 3), как показано на рис. 8в. В этом случае, как видно на рис. 8г (луч 4), паразитный сигнал практически полностью исчезает.
Рис. 8.
ASNOM-изображение (а) скола вертикального кремниевого МОП-транзистора; структура, сформированная вокруг траншеи, состоит в основном из кремния, который дает сравнительно слабый ASNOM-сигнал на частоте 921 см–1 (10.86 мкм); контактные площадки изготовлены из алюминия – металла, обеспечивающего за счет плазмонной поляризуемости довольно сильное отражение; б, в, г – борьба с паразитным “сигналом”. С целью исключения настоящего ASNOM-сигнала игла в этом примере слегка (300–500 нм) отведена от поверхности. Подавление ложного сигнала: б – сигнал фотодетектора (луч 1) и вычисленный по нему ложный сигнал второй гармоники (луч 2) в спектре фототока; в – формирование сглаженной копии входного сигнала (луч 3), разность этих двух сигналов (входного 1 и сглаженного 3) использована для вычисления второй гармоники частоты колебаний иглы (луч 4); г – паразитный сигнал полностью подавлен. Горизонтальный размер “осциллограмм” (б–г) соответствует приблизительно периоду перемещения зеркала в опорном плече; значения на оси ординат указаны в вольтах.
Скорость передачи и обработки данных
Хотя паспорт платы P25M утверждает, что максимальная скорость накопления сигнала ограничена значением 25 Msps для самих микросхем а.ц.п., работающих под управлением п.л.и.с., фактическая скорость накопления данных оказывается заметно ниже. Ограничение обусловлено в основном стабильностью работы п.л.и.с., управляющей микросхемами а.ц.п. и передающей фреймы накопленных данных в память б.с.в.а.д. с использованием режима прямого доступа к памяти на его шине. При задании “скорости накопления” а.ц.п. выше приблизительно 3 Msps стабильность работы системы падает. П.л.и.с. начинает путать пары данных в FIFO (в случае установки п.л.и.с. на режим накопления всех четырех а.ц.п. данные в принимаемом массиве приходят не в ожидаемой последовательности ADC0-ADC1-ADC2-ADC3, а в последовательности ADC2-ADC3-ADC0-ADC1) или данные в паре (в случае установки п.л.и.с. на режим накопления одной пары ADC0-ADC1 данные приходят в последовательности ADC1-ADC0). Эти ошибки по мере увеличения частоты оцифровки возникают спонтанно раз в 5–10 мин работы (и перепутывание каналов затем остается до следующего сбоя), притом при увеличении задаваемой частоты оцифровки такой сбой случается все чаще. При задании частоты оцифровки 3.3–3.5 Msps наступает полная неработоспособность б.с.в.а.д. Привести его в рабочее состояние удается только “перезаливкой логики” п.л.и.с. и программы, управляющей работой его центрального процессора. Стабильность работы б.с.в.а.д. ограничивается также насыщением передаточной способности PCI-канала. В случае программной эмуляции готовности данных (при передаче через PCI-канал синтезируемых данных, заполненных в п.к., например, нулями, т.е. при слабой загрузке шины б.с.в.а.д. передачами реальных данных с а.ц.п.) скорость передачи все равно не удается получить выше 5 Msps. Если не принять программных мер, приостанавливающих посылку новых данных до опустошения входной очереди данных, ожидающих передачи через PCI-канал, программа в б.с.в.а.д. останавливается вовсе, и он перестает отвечать на команды из п.к.
Фактически достижимая скорость оцифровки данных оказалась равна около 3 Msps. Следует отметить, что для нашей измерительной задачи, при частотах колебаний кантилевера в а.с.м.-подобной сканирующей головке ASNOM, лежащих в диапазоне 30–300 кГц, этого быстродействия хватает с запасом. Быстродействие системы в целом ограничено также мощностью процессора в п.к. При задании сложных алгоритмов выделения полезного сигнала и коррекции искажений, при большом числе точек оцифровки загрузка процессора п.к. приближается к 100% и возможны пропуски фреймов данных. В этом случае длительность ступеньки неизменных выходных данных оказывается равной не одному, а двум периодам колебаний модулирующего фазу зеркала в интерферометре Майкельсона.
ВЫВОДЫ
Использование платы цифрового сбора аналогового сигнала и последующей его цифровой обработки позволило создать систему для выделения довольно сложного сигнала из выходного напряжения фотоприемника в системе ASNOM упругого рассеяния света с оптическим гомодинированием. Цифровая обработка данных позволила осуществить алгоритмы выделения полезного сигнала, которые едва ли были осуществимы в чисто аналоговых системах выделения и детектирования сигналов. Разделение программы на обособленные модули позволило достичь гибкости в организации и модификации алгоритмов накопления и детектирования сигнала. Частота оцифровки входных данных достигает 3 Msps.
Список литературы
Zenhausern F., O’Boyle M.P., Wickramasinghe H.K. // Appl. Phys. Lett. AIP. 1994. V. 65. № 13. P. 1623. https://doi.org/10.1063/1.112931
Zenhausern F., Martin Y., Wickramasinghe H.K. // Science. 1995. V. 269. № 5227. P. 1083. https://doi.org/10.1126/science.269.5227.1083
Martin Y., Zenhausern F., Wickramasinghe H.K. // Appl. Phys. Lett. AIP. 1996. V. 68. № 18. P. 2475. https://doi.org/10.1063/1.115825
Knoll B., Keilmann F., Kramer A., Guckenberger R. // Appl. Phys. Lett. AIP. 1997. V. 70. № 20. P. 2667. https://doi.org/10.1063/1.119255
Huber A., Kazantsev D., Keilmann F., Wittborn J., Hillenbrand R. // Advanced Materials. 2007. V. 19. № 17. P. 2209. https://doi.org/10.1002/adma.200602303
Huber A.J., Keilmann F., Wittborn J., Aizpurua J., Hillenbrand R. // Nano Letters. 2008. V. 8. № 11. P. 3766. https://doi.org/10.1021/nl802086x
Knoll B., Keilmann F. // Nature. 1999. V. 399. P. 134. https://doi.org/10.1038/20154
Wurtz G., Bachelot R., Royer P. // Rev. Scient. Instrum. AIP. 1998. V. 69. № 4. P. 1735. https://doi.org/10.1063/1.1148834
Krenn J.R., Dereux A., Weeber J.C., Bourillot E., Lacroute Y., Goudonnet J.P., Schider G., Gotschy W., Leitner A., Aussenegg F.R., Girard C. // Phys. Rev. Lett. American Physical Society. 1999. V. 82. P. 2590. https://doi.org/10.1103/PhysRevLett.82.2590
Казанцев Д.В. // Письма в ЖЭТФ. 2006. Т. 83. Вып. 8. С. 380. https://doi.org/10.1134/S0021364006080054
Brehm M., Taubner T., Hillenbrand R., Keilmann F. // Nano Letters. 2006. V. 6. P. 1307. https://doi.org/10.1021/nl0610836
Berweger S., Nguyen D.M., Muller E.A., Bechtel H.A., Perkins T.T., Raschke M.B. // J. American Chemical Society. 2013. V. 135. № 49. P. 18292. https://doi.org/10.1021/ja409815g
Kumar N., Mignuzzi S., Su W., Roy D. // EPJ Techniques and Instrumentation. 2015. V. 2. № 1. P. 1. https://doi.org/10.1140/epjti/s40485-015-0019-5
Labardi M., Patanè S., Allegrini M. // Appl. Phys. Lett. AIP. 2000. V. 77. № 5. P. 621. https://doi.org/10.1063/1.127064
Hayazawa N., Tarun A., Inouye Y., Kawata S. // J. Appl. Phys. AIP. 2002. V. 92. № 12. P. 6983. https://doi.org/10.1063/1.1519945
Schmid T., Yeo B.-S., Leong G., Stadler J., Zenobi R. // J. Raman Spectroscopy. 2009. V. 40. № 10. P. 1392. https://doi.org/10.1002/jrs.2387
Batchelder J.S., Taubenblatt M.A. // Appl. Phys. Lett. 1989. V. 55. № 3. P. 215. https://doi.org/10.1063/1.102268
Bek A., Vogelgesang R., Kern K. // Rev. Scient. Instrum. AIP. 2006. V. 77. № 4. P. 043703. https://doi.org/10.1063/1.2190211
Vaez-Iravani M., Toledo-Crow R. // Appl. Phys. Lett. 1993. V. 62. № 10. P. 1044. https://doi.org/10.1063/1.108789
Hillenbrand R., Keilmann F. // Phys. Rev. Lett. American Physical Society. 2000. V. 85. P. 3029. https://doi.org/10.1103/PhysRevLett.85.3029
Esteban R., Vogelgesang R., Dorfmüller J., Dmitriev A., Rockstuhl C., Etrich C., Kern K. // Nano Letters. 2008. V. 8. № 10. P. 3155. https://doi.org/10.1021/nl801396r
Ocelic N., Huber A., Hillenbrand R. // Appl. Phys. Lett. AIP. 2006. V. 89. № 10. P. 101124. https://doi.org/10.1063/1.2348781
http://www.innovative-dsp.com/support/manuals/p25m.pdf.
Казанцев Д.В., Казанцева Е.А. // ПТЭ. 2020. № 1. С. 144. https://doi.org/10.1134/S0032816220010218
Казанцев Д.В, Казанцева Е.А. // ПТЭ. 2014. № 5. С. 120. https://doi.org/10.7868/S0032816214040041
S-316. https://www.physikinstrumente.com/en/products/nanopositioning-piezo-flexure-stages/piezo-flexure-tilting-mirrors/s-310-s-316-piezo-z-and-tiptilt-scanner-300600/
S-316. https://static.physikinstrumente.com/fileadmin/user_upload/physik_instrumente/files/datasheets/S-310-S-316-Datasheet.pdf /
https://www.physikinstrumente.com/en/products/controllers-and-drivers/nanopositioning-piezo-controllers/e-503-piezo-amplifier-module-602200/
Cooley J.W., Tukey J.W. // Mathematics of Computation. 1965. V. 19. P. 297. https://doi.org/10.1090/S0025-5718-1965-0178586-1
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента