

Российский физиологический журнал им. И.М. Сеченова, 2022, T. 108, № 4, стр. 505-520
Особенности организации двигательных синергий на разных уровнях управления сложнокоординационным движением человека
С. А. Моисеев 1, *, С. М. Иванов 1, Р. М. Городничев 1
1 Великолукская государственная академия физической культуры и спорта
Великие Луки, Россия
* E-mail: sergey_moiseev@vlgafc.ru
Поступила в редакцию 01.02.2022
После доработки 09.03.2022
Принята к публикации 10.03.2022
- EDN: GMRIZR
- DOI: 10.31857/S0869813922040057
Аннотация
В работе рассматриваются синергетические эффекты, проявляющиеся на уровне взаимодействия различных звеньев опорно-двигательного аппарата с паттернами биоэлектрической активности скелетных мышц в рамках концепции иерархического, модульного принципа управления. Двигательные синергии изучались на мышечном, кинематическом и нейрональном уровнях. Рассматривали пространственно-временную структуру двигательных синергий при выполнении короткого прямого удара боксерами высокой квалификации. Синергии извлекали с помощью факторного анализа методом выделения главных компонент. Установлено, что мышцы, образующие пространственную структуру первой синергии, имеют характерные для синергии паттерны импульсной активности управляющих сигналов. Пространственно-временные характеристики перемещений сегментов тела, а также параметры электроактивности скелетных мышц, в структуре синергий демонстрируют высокую стабильность при многократных реализациях двигательного действия и низкую вариативность при внутри- и межиндивидуальном сравнении. Межмышечное взаимодействие, характерное для синергии может быть достигнуто разными стратегиями организации импульсной активности двигательных единиц. Сложное по координации движение может иметь разные временные паттерны активации синергий, но при этом паттерны одной формы могут быть смещены во времени относительно друг друга при их сравнении в ходе многократных реализаций модельного движения.
Проблема координации движений человека как преодоление избыточности степеней свободы, сформулированная Н.А. Бернштейном, и на сегодняшний день остается актуальной [1]. Одна из теорий, рассматривающая решение этой фундаментальной проблемы, базируется на представлении о модульной организации нейрональных сетей, осуществляющих координацию широкого спектра произвольных движений, призванной снизить вычислительную нагрузку на структуры центральной нервной системы. Это может быть реализовано путем организации многоуровневой системы, где высший в иерархии уровень регулирует лишь некоторые параметры работы низшего уровня, функционирующего независимо [2]. Несомненное преимущество иерархической организации управления можно проследить при рассмотрении взаимодействия активности нейрональных сетей, контролирующих движения суставов одной конечности, двух конечностей одной пары, иннервируемых одним сегментом спинного мозга и, наконец, координации, объединяющей различные сегменты спинного мозга при осуществлении сложных многосуставных билатеральных движений. Первые два аспекта довольно широко представлены в отечественной и зарубежной литературе. Убедительные доказательства в пользу существования модульной структуры управления получены при изучении синергетических эффектов (эффектов взаимодействия различных параметров моторного выхода) в структуре движений, осуществляемых изолированно одной из верхних конечностей при создании условий искусственного ограничения степеней свободы [3]. Ярким примером рассмотрения синергетического взаимодействия звеньев одной пары конечностей являются локомоции, изучению которых посвящено немало работ [4–6]. Однако вопрос интеграции различных уровней управления многосуставными движениями представлен крайне немногочисленными исследованиями.
Как правило, синергетические эффекты рассматриваются на одном из трех уровней, а в качестве исходных данных используют различные характеристики и параметры моторного выхода. На мышечном уровне таковыми являются параметры биоэлектроактивности скелетных мышц, на кинематическом – пространственно-временные характеристики движений. Нейрональный уровень исследования синергий включает рассмотрение центральных управляющих сигналов с применением методов электроэнцефалографии и электронейромиографии. Регистрируемые сигналы рассматривают изолированно, либо сочетано в зависимости от задач и уровня исследования, чаще с применением методов факторизации данных, позволяющих представить структуру изучаемых движений в виде временных паттернов активации извлекаемых модулей (синергий) и их пространственной архитектуры [7, 8]. Несмотря на существование ряда недостатков и ограничений такого подхода он широко применяется при исследовании координации произвольных движений и может дать представление о том, как параметры двигательной задачи кодируются в структуре двигательных синергий [9, 10]. Таким образом, двигательные синергии имеют характерные черты, которые могут быть выявлены с помощью методов факторизации матриц, предполагающие одновременное, но не обязательно однонаправленное изменение регистрируемых параметров моторного выхода на определенном уровне исследования синергий. На мышечном уровне таковыми являются характеристики биоэлектроактивности скелетных мышц, на кинематическом – взаимодействие суставных углов и пространственно-временных характеристик движения, а на нейрональном – согласованное изменение центральных управляющих сигналов.
Исходя из вышесказанного, задачами данного исследования явилось выявление синергетических эффектов, проявляющихся на уровне взаимодействия различных звеньев опорно-двигательного аппарата (межзвенные синергетические эффекты), и установление взаимосвязи конкретных функций (перемещение звеньев тела с определенными пространственно-временными характеристиками) с паттернами биоэлектрической активности скелетных мышц в рамках концепции иерархическогомодульного принципа управления.
МЕТОДЫ ИССЛЕДОВАНИЯ
Эксперименты выполнены на 8 боксерах мужского пола, имеющих звание кандидата в мастера спорта и мастера спорта, в возрасте от 19 до 24 лет. Исследования проведены на базе Научно-исследовательского института проблем спорта и оздоровительной физической культуры Великолукской государственной академии физической культуры и спорта в лаборатории физиологии нервной и мышечной систем. Все исследования проведены с соблюдением требований и принципов биомедицинской этики, сформулированными в Хельсинской декларации 1964 г., и одобрены локальным биоэтическим комитетом. Каждый участник представил добровольное письменное информированное согласие на участие в исследованиях.
Испытуемые выполняли три серии прямых коротких ударов по лапам, удерживаемым оппонентом, по 11 в каждой с интервалом отдыха между ними до субъективного ощущения полного восстановления. Первый и последний удар в каждой серии исключали из анализа, и в общей сложности анализировали структуру 216 ударов. Во время движений спортсмена регистрировали электромиограммы (ЭМГ) шестнадцати поверхностных скелетных мышц туловища, верхних и нижних конечностей при помощи телеметрического многоканального биомонитора МЕ6000 и программного обеспечения MegaWin (MegaElectronics LTD, Финляндия). Регистрировали ЭМГ следующих билатеральных мышц: двуглавой и трехглавой плеча, трапециевидной (верхние пучки), дельтовидной (передняя часть), большой грудной, прямой живота (средняя часть), двуглавой и прямой бедра. Для отведения ЭМГ применяли накожные одноразовые самоклеющиеся электроды с токопроводящим гелем и активной площадью контакта 2.5 см2, 36 × 45 мм (Swaromed, Австрия). Электроды накладывались биполярно, при этом активный располагался в области проекции двигательной точки исследуемой мышцы, а референтный прикреплялся по ходу ее волокон с межэлектродным расстоянием 2 см,предусматривался дополнительный электрод заземления на каждой мышце [11]. ЭМГ-сигналы усиливались биомонитором с полосой пропускания частот от 10 до 10 000 Гц и оцифровывали с частотой 2000 Гц.
Зарегистрированные ЭМГ обрабатывались двумя способами. В первом случае они фильтровались полосовым фильтром с полосой пропускания 20–450 Гц, силой подавления 60 дБ, затем выпрямлялись с интервалом усреднения 0.002 с и повторно применяли фильтр низких частот (ФНЧ)15 Гц, используя программное обеспечение MegaWin. Во втором случае при рассмотрении эффектов взаимодействия потенциалов интерференционной ЭМГ к сигналам не применяли фильтры. Поскольку источником каждого отклонения потенциала в интерференционной ЭМГ является потенциал действия двигательной единицы, динамика таких отклонений может дать информацию об импульсной активности двигательных единиц (ДЕ) в области отведения ЭМГ [12]. Вариационный ряд ЭМГ делили на двадцать равных отрезков, в каждом из которых рассчитывали количество турнов (поворотов). За единицу турна принимали изменение направления кривой ЭМГ вне зависимости от пересечения нулевой линии с амплитудой от пика до пика не менее 10 мкВ [12, 13]. Обработанные двумя способами ЭМГ экспортировали в систему Statistica (StatSoft, Inc., version 10).
Видеозахват движений спортсмена осуществляли с помощью системы 3D-видеозахвата Qualisys (Qualisys, Швеция), включающей 8 высокоскоростных камер Oqus. Светоотражающие маркеры крепились на билатеральных антропометрических точках сегментов тела: лобной, шейной, плечевой, лучевой, шиловидной, вертельной, верхнеберцовой, нижнеберцовой, конечной [14]. Частота кадров видеозахвата составляла 500 Гц. Начало движения спортсмена (короткого прямого удара) определяли по началу изменения угла в коленном суставе правой ноги, а окончание определялось моментом завершения перемещения шиловидной точки на цели. Первичную обработку видеоряда осуществляли в программной среде Qualisys Track Manager, рассчитывали перемещение антопометрических точек, их скорость и ускорение, величины суставных углов. Оцифрованные данные, содержащие вариационные ряды перемещений, скоростей, ускорений, величин суставных углов, а также маркеры, определяющие граничные моменты начала и окончания движения, экспортировались в систему Statistica.
В системе Statistica формировали матрицу исходных данных (X), размерностью (I × J), где I – число точек (измерений в момент времени) двигательного действия (для каждого движения – 300 точек), а J – число независимых переменных (вариационных рядов ЭМГ, суставных углов, кинематических параметров – всего 74), общая размерность матрицы 2700 × 74. Все вариационные ряды были интерполированы относительно единой точки отсчета. К рядам, содержащим данные о перемещении, скорости и ускорении точек сегментов тела, применяли простое экспоненциальное сглаживание (α = .050). Все данные в матрице были стандартизированы к единице стандартного отклонения (табл. 1).
Таблица 1.
Процедуры обработки, применяемые к вариационным рядам данных и количество анализируемых сигналов
| Процедуры обработки | Вариационные ряды | ||||
|---|---|---|---|---|---|
| ЭМГ | величины суставных углов | перемещение | скорость | ускорение | |
| Количество | 16 | 10 | 16 | 16 | 16 |
| Полосовая фильтрация 20–450 Гц | + | – | – | – | – |
| Выпрямление (интервал = 0.002 с) | + | – | – | – | – |
| ФНЧ (15 Гц) | + | – | – | – | – |
| Простое экспоненциальное сглаживание (α = .050) | – | – | + | + | + |
| Стандартизация (М = 0, SD = 1) | + | + | + | + | + |
Аналогично формировали отдельную матрицу данных такой же размерности, где I – число точек (измерений в момент времени) двигательного действия (для каждого движения – 20 точек), а J – число независимых переменных (вариационных рядов количества турнов ЭМГ – всего 16), общая размерность матрицы 180 × 16. Данные в матрице были стандартизированы к единице стандартного отклонения.
Из матриц извлекали синергии с помощью факторного анализа (FA) методом выделения главных компонент без вращения факторов. Факторный анализ использовали как метод снижения размерности данных и как метод их классификации. В качестве критерия эффективности извлечения синергий использовали процент общей дисперсии, учитываемый каждым фактором в общем наборе данных (VAF). Допустимым уровнем эффективности реконструкции исходных данных считали VAF не менее 80%. Рассматривали факторы, имеющие собственные значения (eigenvalues) больше единицы и учитывающие не менее 5% общей дисперсии.
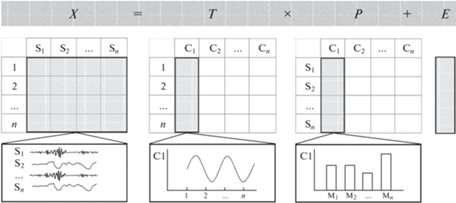
Матрица X разлагалась на произведение двух матриц: X = T × P + E, где T – матрица счетов (“scores”), P – матрица нагрузок (“loadings”), E – матрица остатков (рис. 1). Матрица нагрузок несет информацию о взаимосвязи или независимости переменных относительно новых, формальных переменных, полученных в процессе разложения матриц – “векторы синергии”. Матрица счетов определяет временную организацию выявленных синергий и представляет собой проекции исходных данных на подпространство главных компонент – “коэффициенты активации”. Разложение матриц осуществляли в среде Statistica 10.0, используя стандартный модуль “Advanced/Multivariate–Mult/Exploratory–Factor”.
Рис. 1.
Схема разложения исходной матрицы. X – исходная матрица, T – матрица счетов, P – матрица нагрузок, E – матрица остатков. S1, 2, n – исходные сигналы (ЭМГ, величины углов и пр.), С – главный компонент, 1, 2, … n – значение в момент времени.
Математико-статистическая обработка данных выполнена в Statistica 10.0 и включала расчет среднего арифметического (M), ошибки среднего арифметического (SE), стандартного отклонения (SD), коэффициента вариации (CV). Для сравнения параметров извлекаемых синергий применяли анализ коэффициентов корреляции Пирсона и максимальных значений кросскорреляционных функций с учетом смещения относительно нуля, где 1 – полное соответствие, 0 – отсутствие взаимосвязи.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
В результате разложения матрицы данных установлено три фактора (синергии) с общей долей объясняемой дисперсии 85.42 ± 1.28. Коэффициенты активации первой синергии характеризовались одним пиком активности, приходящимся на первую половину движения, затем следовало постепенное снижение ее активности (рис. 2c). Следует отметить высокую степень воспроизводимости временной структуры первой синергии при многократных реализациях удара, где максимальные значения кросскорреляционных функций составляли в среднем по группе 0.83 ± 0.05, а CV не превышали 15.73%.
Рис. 2.
Кинематограмма (a), образец электромиограммы (b) и коэффициенты активации двигательных синергий (c) при выполнении прямого удара в боксе. Syn 1, 2, 3 – номер синергии. По оси абсцисс – прогресс упражнения (%), по оси ординат – у.е. На рис. b – мышцы сверху вниз: двуглавая плеча пр., трехглавая плеча пр., трапециевидная (верхние пучки) пр., дельтовидная (передняя часть) пр., двуглавая плеча лев., трехглавая плеча лев., трапециевидная (верхние пучки) лев., дельтовидная (передняя часть) лев., большая грудная пр., большая грудная лев., прямая живота пр., прямая живота лев., двуглавая бедра пр., прямая бедра пр., двуглавая бедра лев., прямая бедра лев. Сплошные и пунктирные линии на графике – усредненные паттерны. Штриховкой показаны границы крайних значений коэффициентов активации синергий.
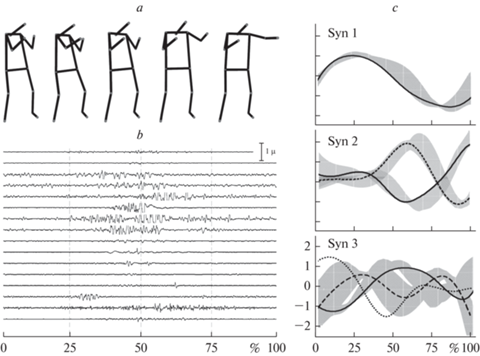
Временная структура второй выявленной синергии демонстрировала два паттерна активации с разнонаправленными пиками активности во второй половине движения (рис. 2c). Оба паттерна активации синергии имели высокие коэффициенты соответствия при их сравнении в разных попытках – 0.73 ± 0.05 и 0.71 ± 0.06, следует отметить их низкие коэффициенты вариативности 12.20 и 15.31% соответственно. Коэффициенты активации третьей синергии были представлены тремя характерными паттернами. Первый характеризовался плавным возрастанием коэффициентов к середине движения и постепенным их снижением к его окончанию, второй паттерн имел два выраженных пика активности в первой и второй половинах упражнения, коэффициенты третьего паттерна снижались к середине упражнения и возрастали к концу третьей четверти рассматриваемого двигательного действия (рис. 2c).
Исходя из задач работы, были рассмотрены векторы извлеченных синергий. Было установлено взаимодействие шести скелетных мышц, входящих в структуру первой синергии: трехглавой плеча правой и левой руки, дельтовидной, двуглавой мышцы бедра правой стороны и прямой бедра левой нижней конечности (рис. 3a). Эти мышцы входили в структуру первой синергии в 100% попыток, реализуемых всеми испытуемыми, причем CV не превышали 11.86%, а, например, для прямой мышцы бедра левой стороны отмечалась очень низкая вариативность и высокая степень повторяемости ее включения в структуру первой синергии – 4.79%.
Рис. 3.
Векторы двигательных синергий при выполнении прямого удара в боксе. Syn 1, 2, 3 – номер синергии. a – мышечные синергии, b – кинематические синергии (коактивация суставных углов). На рис. a: 1 – двуглавая плеча пр., 2 – трехглавая плеча пр., 3 – трапециевидная (верхние пучки) пр., 4 – дельтовидная (передняя часть) пр., 5 – двуглавая плеча лев., 6 – трехглавая плеча лев., 7 – трапециевидная (верхние пучки) лев., 8 – дельтовидная (передняя часть) лев., 9 – большая грудная пр., 10 – большая грудная лев., 11 – прямая живота пр., 12 – прямая живота лев., 13 – двуглавая бедра пр., 14 – прямая бедра пр., 15 – двуглавая бедра лев., 16 – прямая бедра лев. На рис. b: 1 – тазобедренный лев., 2 – тазобедренный пр., 3 – голеностопный лев., 4 – голеностопный пр., 5 – коленный лев., 6 – коленный пр., 7 – локтевой лев., 8 – локтевой пр., 9 – плечевой лев., 10 – плечевой пр. По оси ординат – факторные нагрузки. Данные на рисунке представлены в виде M ± SE ± SD.
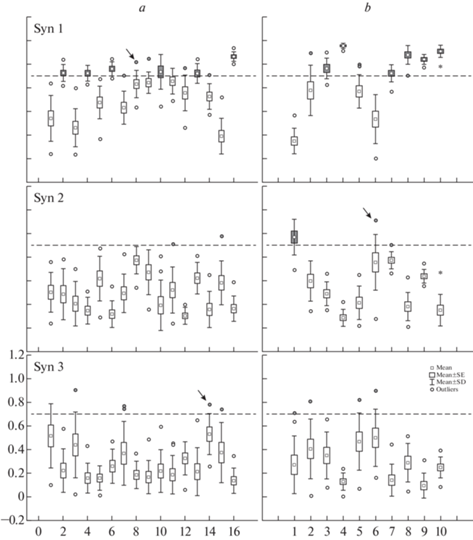
Следует отметить, что помимо названных мышц в структуру первой синергии в диапазоне 61–86% от общего числа попыток входили также дельтовидная левой стороны, большие грудные и прямая мышца живота правой стороны тела. В целом векторы первой синергии демонстрировали низкую вариативность и высокую воспроизводимость, коэффициенты корреляции составляли 0.71 ± 0.02, а CV не превышали 15.46%. Структура других выявленных синергий, преимущественно, была представлена одной скелетной мышцей, имеющей высокие коэффициенты взаимосвязи с новой (формальной) компонентой – дельтовидной левой руки (55.6% случаев, 0.57 ± 0.03, CV – 20.62%) во второй синергии и двуглавой плеча правой руки в 54.6% случаев (0.51 ± 0.09, CV – 52.46%) в третьей. В отдельных случаях было выявлено подключение к синергиям трапециевидных мышц, прямой живота правой стороны, прямой бедра правой и двуглавой мышцы бедра левой нижней конечности (рис. 3a). Эти подключения показаны на рисунке как крайние значения (outliers). Векторы этих синергий демонстрировали среднюю степень сходства – не более 0.65 ± 0.02, а вариативность оценивалась как низкая – CV не более 14.1%. Таким образом, пространственная структура второй и третьей мышечных синергий оказывалась вариативной при рассмотрении их компонентного состава и воспроизводимости в разных попытках в среднем по группе боксеров.
Пространственная организация первой синергии в 100% случаев определялась коактивацией тазобедренных, плечевых и локтевых суставов обеих сторон тела (рис. 3b). Названные суставные углы демонстрировали высокие факторные нагрузки, а их вариативность оценивалась как низкая, например, CV голеностопного правого и плечевого левого суставов не превышали 4.96% при сравнении их в разных реализациях. Векторы синергии также показывали высокое соответствие в разных попытках – 0.84 ± 0.03, а CV составляли 11.87%. Следует отметить, что в 87% реализаций удара в первую синергию оказывались вовлечены локтевой сустав левой руки и реже – тазобедренный сустав правой стороны тела – 56% случаев. Таким образом, в группе испытуемых было выявлено синергетическое взаимодействие восьми из десяти регистрируемых суставных углов. Вторая синергия характеризовалась взаимодействием тазобедренного сустава левой (в 90% случаев, CV = 19.8%) и коленных суставов обеих нижних конечностей (рис. 3b). Векторы данной синергии демонстрировали высокую степень сходства, коэффициенты корреляции в среднем по группе составляли не менее 0.92 ± 0.01, а их вариативность оценивалась как крайне низкая (CV = 3.1%). Третья синергия преимущественно включала динамику величин углов тазобедренных и коленных суставов, однако лишь в некоторых реализациях коэффициенты данных углов достигали установленного нами порога отнесения к синергии– 0.7. Тем не менее, векторы третьей синергии демонстрировали высокую воспроизводимость в разных попытках (0.78 ± 0.02) и очень низкую вариативность, CV не превышали 9.92%.
Пространственная организация выявленных кинематических синергий представлена на рис. 4. Установлено, что первая синергия включала синергетические паттерны перемещения большей части антропометрических точек. Так, во всех реализациях всеми испытуемыми наблюдались сочетанные движения верхних конечностей, головы и нижних конечностей за исключением верхнеберцовых антропометрических точек. Факторные нагрузки точек верхних конечностей при их меж- и внутрииндивидуальном рассмотрении демонстрировали очень низкие коэффициенты вариативности – не более 7.63%, а нижнеберцовые и конечные демонстрировали несколько бόльшие значения – от 10.14 до 24.84%. В целом векторы первой кинематической синергии, определяемой сочетанным перемещением антропометрических точек сегментов тела в среднем составляли 0.89 ± 0.01, а их вариативность была очень низкой – 4.28% (рис. 4а).
Рис. 4.
Векторы кинематических синергий при выполнении прямого удара в боксе. a – перемещение, b – скорость, c – ускорение. По оси абсцисс – антропометрические точки: 1 – лобная, 2 – шейная, 3 – плечевая пр., 4 – плечевая лев., 5 – лучевая пр., 6 – лучевая лев., 7 – шиловидная пр., 8 – шиловидная лев., 9 – вертельная пр., 10 – вертельная лев., 11 – верхнеберцовая пр., 12 – верхнеберцовая лев., 13 – нижнеберцовая пр., 14 – нижнеберцовая лев., 15 – конечная пр., 16 – конечная лев. По оси ординат – факторные нагрузки. Syn 1, 2, 3 – номер синергии. Данные на рисунке представлены в виде M ± SE ± SD.
Установлено, что сегменты тела, имеющие характерные синергетические паттерны перемещений, имели схожую динамику изменений скоростей и ускорений соответствующих антропометрических точек (рис. 4b). Их вариативность также была низкой и отмечалась высокая степень сходства векторов синергии (0.88 ± 0.01, CV – 6.49% и 0.66 ± 0.05, CV – 2.12% соответственно).
Вторая выявленная синергия характеризовалась соответствующими паттернами перемещений лучевой, шиловидной и верхнеберцовой антропометрических точек правой стороны тела, синергетическое взаимодействие этих сегментов было отмечено в большинстве регистрируемых движений. Векторы данной синергии показывали высокую степень соответствия – 0.78 ± 0.03. Также установлено, что структура второй синергии определялась не только паттернами перемещений, но и характерными сочетанными изменениями скоростей тех же сегментов тела, демонстрирующих высокое соответствие векторов синергии при многократных реализациях удара – 0.79 ± 0.03 (рис. 4b). Коэффициенты вариативности сегментов тела в структуре второй синергии в разных реализациях удара оценивались как низкие, CV находились в диапазоне от 15.03 до 24.22%. Векторы второй синергии также демонстрировали низкую вариативность – 14.42%. Следует отметить, что в ряде реализаций движения (не более 34% случаев) в структуру второй синергии дополнительно включалась конечная точка правой нижней конечности, имеющая схожую динамику перемещений и скоростей.
Сочетанное перемещение и скорость правой шиловидной и верхнеберцовой антропометрических точек левой нижней конечности определяли структуру третьей рассматриваемой синергии (рис. 4). Коэффициенты вариативности факторных нагрузок данных точек оценивались как средние, как при рассмотрении паттернов перемещений, так и скоростей при многократных реализациях прямого удара, а другие рассматриваемые сегменты демонстрировали высокую вариативность. Векторы третьей синергии показывали высокую степень сходства – 0.70 ± 0.03 и 0.73 ± 0.04 соответственно для перемещений и скоростей и низкую вариативность – не более 19.12%. Паттерны ускорений регистрируемых сегментов тела в большинстве случаев были более вариативны и не имели характерных для синергии изменений по показателям перемещений и скоростей.
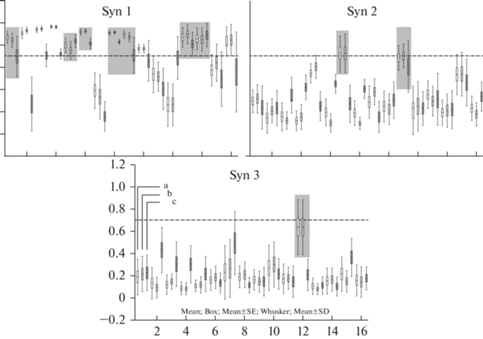
Анализ временнóй структуры паттернов синергетического взаимодействия центральных управляющих сигналов показал наличие двух разных стратегий управления движением. Первая характеризовалась возрастанием импульсной активности ДЕ во второй половине движения и достигала максимума к его окончанию, вторая демонстрировала постепенное снижение активности (рис. 5a).
Рис. 5.
Паттерны синергетического взаимодействия импульсной активности двигательных единиц при реализации прямого удара в боксе. a – коэффициенты активации, по оси абсцисс – прогресс движения (%), по оси ординат – у. е.; b – пространственная структура синергий, по оси ординат – факторные нагрузки, по оси абсцисс – скелетные мышцы: 1 – двуглавая плеча пр., 2 – трехглавая плеча пр., 3 – трапециевидная (верхние пучки) пр., 4 – дельтовидная (передняя часть) пр., 5 – двуглавая плеча лев., 6 – трехглавая плеча лев., 7 – трапециевидная (верхние пучки) лев., 8 – дельтовидная (передняя часть) лев., 9 – большая грудная пр., 10 – большая грудная лев., 11 – прямая живота пр., 12 – прямая живота лев., 13 – двуглавая бедра пр., 14 – прямая бедра пр., 15 – двуглавая бедра лев., 16 – прямая бедра лев. Syn 1, 2, 3 – номер синергии.

Оба паттерна активации имели высокую степень воспроизводимости, что подтверждается высокими значениями максимумов кросскорреляционных функций – 0.92 ± 0.23 и 0.84 ± 0.03. Коэффициенты вариативности, полученные при сравнении коэффициентов активации данных синергий множественных реализаций ударов, не превышали 11.21%, что свидетельствует о низкой вариативности. Следует отметить, что по большей части регистрировались максимальные значения кросскорреляционных функций со смещением их в отрицательную сторону. Вторая и третья установленные синергии имели выраженные пики активности в третьей и последней четвертях рассматриваемого движения, коэффициенты их активации демонстрировали среднюю воспроизводимость от удара к удару, а CV были низкими, но достигали несколько больших значений, чем в первой синергии – 25.32%.
В абсолютном большинстве случаев пространственная организация первой синергии включала характерные паттерны импульсной активности ДЕ трехглавой мышцы плеча левой руки, большой грудной мышцы правой стороны, двуглавой бедра правой и прямой мышцы бедра левой нижней конечности (рис. 5b). При внутри- и межиндивидуальном сравнении электроактивность данных мышц демонстрировала высокие факторные нагрузки – от 0.84 ± 0.02 и выше, в некоторых реализациях они достигали 0.91 ± 0.01, при этом отмечалась крайне низкая вариативность в диапазоне от 4.68 до 7.95%. В целом векторы первой синергии демонстрировали высокое сходство при многократных повторениях движения (0.74 ± 0.02), а их вариативность оценивалась как низкая. В диапазоне от 50 до 80% из общего числа регистрируемых ударов первая синергия также включала активность трехглавой мышцы плеча правой руки, большой грудной левой, прямой живота правой и прямой мышцы бедра правой нижней конечности.Вторая и третья установленные синергии демонстрировали среднюю воспроизводимость векторов синергии (0.57 ± 0.06 и 0.31 ± 0.03 соответственно) при низкой вариативности достигающей 27.95%. Следует отметить, что векторы этих синергий в среднем по группе не достигали установленного порога 0.7, однако в некоторых реализациях (до 30% от общего числа движений) ко второй синергии можно отнести импульсную активность двуглавой плеча и дельтовидной мышцы правой руки, а к третьей – двуглавой плеча, трапециевидной правой стороны, двуглавой плеча, дельтовидной левой руки, а также двуглавой бедра левой нижней конечности. На рис. 5b эти значения представлены как крайние, резко отличающиеся значения от среднего (outliers extremes).
Таким образом, при многократных реализациях прямого удара в боксе структура первой синергии представлена двумя разными временными паттернами активации, а пространственная структура включала более половины исследуемых скелетных мышц с характерными синергетическими паттернами импульсной активности двигательных единиц. Другие выявленные синергии демонстрировали характерную для синергии временную динамику, но отличались нестабильной пространственной организацией.
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
В нашем исследовании были получены от 4 до 5 извлекаемых факторов (синергий) в разных реализациях прямого удара, однако для рассмотрения были оставлены три синергии, поскольку остальные в большинстве случаев не отвечали установленным требованиями к эффективности извлечения методом факторного анализа, и кроме того, данным этих факторов трудно придать приемлемую физиологическую интерпретацию. Схожее количество извлекаемых модулей было получено при рассмотрении ациклических движений, в реализации которых задействованы различные сегменты тела, при этом отмечается, что обнаруженные методами факторизации данных синергии не являются вычислительным артефактом, а отражают основные аспекты организации паттернов активации мышц, лежащих в основе двигательного поведения [15, 16].
В ряде работ указывается на необходимость соблюдения осторожности при выборе исходных сигналов, включаемых в анализ, поскольку количество ЭМГ при анализе мышечных синергий и количество повторений изучаемого движения влияет на результаты их извлечения и адекватность интерпретации получаемых данных. Приводятся данные о возможных расхождениях в результатах рассмотрения синергий даже при рассмотрении схожих по биомеханической структуре движений [10, 17]. Возможно, результаты извлечения синергий оказываются чувствительны к исходному набору данных в связи с особенностями алгоритма факторного анализа. Так, при анализе главных компонент выделение факторов осуществляется последовательно с максимизацией остаточной дисперсии, чтобы новые выделенные факторы были ортогональными (некоррелированными). Это наводит на мысль о том, что, например, мышечные синергии, извлекаемые из исходного набора данных, содержащих только данные ЭМГ, будут отличаться от таковых, извлеченных из более широкого набора сигналов. На первый взгляд, этот факт может показаться недостатком метода, однако подход с включением в анализ разнообразных сигналов и соответствующей предварительной математической обработкой, на наш взгляд, наиболее целесообразен,поскольку только в этом случае учитываются сочетанные изменения параметров движения, отражающие все уровни его исследования.
Согласованная активация скелетных мышц, приводящая к соответствующему взаимодействию суставных углов, характерным паттернам перемещений и скоростей различных звеньев тела, вероятно, не является простым следствием биомеханического взаимодействия сегментов тела и тем более вычислительным артефактом, а обусловлено контролем структур ЦНС. Этот вопрос довольно часто ставится исследователями координации движений и все чаще приводятся доказательства в пользу нейронального контроля управления посредством образования и модуляции двигательных синергий [18, 19]. Подтверждение нейронального происхождения синергий находится в наших данных при рассмотрении межмышечной координации и характерных паттернов импульсной активности ДЕ ряда скелетных мышц. Оказывается, что мышцы, образующие пространственную структуру первой синергии, имеют и характерные для синергии сочетанные паттерны импульсной активности управляющих сигналов. Кроме того, пространственно-временные характеристики сегментов тела, а также скелетные мышцы в структуре синергий, демонстрируют высокую стабильность при многократных реализациях стандартного движения и очень низкую вариативность при внутри- и межиндивидуальном сравнении. Эта закономерность прослеживается у разных испытуемых, несмотря на довольно существенные различия в их антропометрических данных.Таким образом, выявляемые синергии, вероятно, являются отдельными морфо-функциональными единицами, в основе функционирования которых лежит активность нейрональных сетей, обеспечивающих надежное управление сложным двигательным навыком, объединяющих рефлексы, организованные на разных уровнях спинного мозга и реализующих сочетанное однонаправленное изменение параметров моторного выхода.
Помимо образования функциональных синергий, проблема избыточности степеней свободы может быть решена путем разделения параметров управления на существенные и несущественные [20]. В действительности, такие параметры управления могут быть обнаружены и в структуре извлекаемых двигательных синергий, на что указывает закономерность проявления вариативности их пространственно-временной архитектуры. В наших исследованиях в большинстве случаев параметры, проявляющие синергетическое взаимодействие в структуре извлеченных синергий, имели низкий или крайне низкий уровень вариативности. Кроме того, отмечалась тенденция к возрастанию вариативности параметров тех сегментов тела, которые совершают меньшее перемещение – это нижнеберцовые и конечные антропометрические точки, в то время как верхний плечевой пояс демонстрировал низкую вариативность в структуре синергий. Очевидно, что последние имеют определяющее значение в эффективности реализаций целевого движения и управляющая система в этом случае осуществляет более жесткий контроль параметров, но все же допускает незначительную вариативность. Вышеуказанное согласуется в определенной мере с понятием “двигательной эквивалентности”, согласно которому управляющая система может генерировать разные стратегии движения даже при неизменных внешних условиях [18]. В структуре двигательных синергий рассматриваемого нами движения динамика ЭМГ-активности и пространственно-временных характеристик отдельных сегментов тела демонстрировала высокую стабильность при многократных реализациях удара. Другой принцип управления, тесно связанный с проявлением вариативности движений, заключается в способности управляющей системы достигать цели посредством разных стратегий – “двигательная константность”. В наших исследованиях находится подтверждение и данному принципу применительно к структуре двигательных синергий. Было установлено, что в ряде реализаций движения, в синергию оказывались вовлечены дополнительные мышцы, что приводило к появлению дополнительных эффектов коактивации некоторых суставных углов. Такая закономерность прослеживалась и на уровне управляющих сигналов. Временнáя структура некоторых выявленных нами синергий также демонстрировала эту способность управляющей системы, что проявлялось в формировании совершенно разных временных паттернов активации при реализации удара в стандартных экспериментальных условиях. Так, структура первой синергии на мышечном уровне определялась одним паттерном активации, а на уровне взаимодействия управляющих сигналов эта же синергия демонстрировала два характерных паттерна. Таким образом, межмышечное синергетическое взаимодействие может быть достигнуто разными стратегиями организации импульсной активности двигательных единиц.
Разные временные паттерны и пространственная структура синергий могут быть связаны с переходом от дискретных движений к ритмическим, которые имеют разные способы управления в ЦНС. Сообщается, что генерация синергий при ритмических движениях может обеспечить большую вычислительную эффективность, т.е. в большей степени снизить нагрузку на высшие управляющие отделы [22, 23]. Мы не исключаем такую возможность, поскольку протокол исследований не предполагал установление темпа выполнения движений, а анализ временных интервалов между ударами одной серии показал их уменьшение в сравнении с началом серии. Кроме того, известны так называемые одномоментные синергии, рассматриваемые в настоящей работе, и синергии, изменяющиеся во времени [24]. Выявление последних возможно с применением анализа кросскорреляционных функций, где смещение максимумов относительно нуля свидетельствует об опережении либо запаздывании одного процесса относительно другого [12]. Получаемые коэффициенты кросскорреляционных функций в наших исследованиях, преимущественно, были смещены в отрицательную сторону в ряде реализаций ударов. Это свидетельствует о том, что стандартное движение может иметь разные временные паттерны активации синергий, но при этом паттерны одной формы могут быть смещены во времени относительно друг друга при их сравнении в ходе многократных реализаций модельного движения.
ЗАКЛЮЧЕНИЕ
Пространственная структура двигательных синергий, организованных на мышечном уровне и на уровне управляющих сигналов, демонстрирует высокое сходство и стабильность при многократных реализациях стандартного движения, что свидетельствует в пользу утверждения о нейрональной природе управления движением посредством объединения различных сегментов спинного мозга в единую систему контроля.
Высокая стабильность пространственно-временной структуры извлекаемых синергетических модулей, организованных на разных уровнях управляющей системы, а также формирование разных временных паттернов активации синергий при многократных реализациях сложного движения демонстрирует способность управляющей системы генерировать различные стратегии решения двигательной задачи в стандартных, относительно неизмененных условиях ее выполнения.
Список литературы
Бернштейн НА (1990) Физиология движений и активность М. Наука. [Bernshtejn NA (1990) Physiology of movements and activity. M. Nauka. (In Russ)].
Гурфинкель ВС, Коц ЯМ, Шик МЛ (1965) Регуляция позы человека. Москва. Наука. [Gurfinkel` VS, Kocz YaM, Shik ML (1965) Regulation of human posture. Moskva. Nauka. (In Russ)].
Muceli S, Boye A, d’Avella A, Farina D (2010) Identifying representative synergy matrices for describing muscular activation patterns during multidirectional reaching in the horizontal plane. J Neurophysiol 103(3): 1532–1542. https://doi.org/10.1152/jn.00559.2009
Santuz A, Ekizos A, Kunimasa Y, Kijima K, Ishikawa M, Arampatzis A (2020) Lower complexity of motor primitives ensures robust control of high-speed human locomotion. Heliyon 6(10): e05377. https://doi.org/10.1016/j.heliyon.2020.e05377
Escalona M, Bourbonnais D, Goyette M, Le Flem D, Duclos C, Gagnon D (2021) Effects of varying overground walking speeds on lower-extremity muscle synergies in healthy individuals. Motor Control 27: 1–18.https://doi.org/10.1123/mc.2020-0008
Kerkman J, Bekius A, Boonstra T, Daffertshofer A, Dominici N (2020) Muscle synergies and coherence networks reflect different modes of coordination during walking. Front Physiol 11: 751. https://doi.org/10.3389/fphys.2020.00751
Tresch M, Cheung V, d’Avella A (2006) Matrix factorization algorithms for the identification of muscle synergies: evaluation on simulated and experimental data sets. J Neurophysiol 95(4): 2199–2212. https://doi.org/10.1152/jn.00222.2005
Rabbi M, Pizzolato C, Lloyd D, Carty C, Devaprakash D, Diamond (2020) Non-negative matrix factorization is the most appropriate method for extraction of muscle synergies in walking and running. Sci Rep 10(1): 8266. https://doi.org/10.1038/s41598-020-65257-w
Моисеев С,Пухов А, Михайлова Е, Городничев Р (2021) Методологические и вычислительные аспекты извлечения обширных мышечных синергий при локомоциях умеренной интенсивности. Рос физиол журн им ИМ Сеченова108(1):24-35. [Moiseev A, Pukhov A, Mikhailova E, Gorodnichev R (2021) Methodological and Computational Aspects of Extracting Extensive Muscle Synergies in Moderate-Intensity Locomotions. Russ J Physiol 108(1): 24–35. (In Russ)].https://doi.org/10.31857/S0869813922010101
Santos P, Vaz J, Correia P, Valamatos M, Veloso A, Pezarat-Correia P (2020) Muscle synergies reliability in the power clean exercise. J Funct Morphol Kinesiol 5(4): 75.https://doi.org/10.3390/jfmk5040075
Altenburger K, Bumke O, Foerster O (1937) Allgemeine neurologie. Handbuch der Neurologie. Berlin.
Персон Р (1969) Электромиография в исследованиях человека. Москва. Наука. [Person R (1969) Electromyography in human studies. Moskva. Nauka. (In Russ)].
Команцев В, Заболотных В (2001) Методические основы клинической электронейромиографии. СПб. Лань. [Komancev V, Zabolotny`x V (2001) Methodological foundations of clinical electromyography. SPb. Lan. (In Russ)].
Clauser C, McConville J, Yoing J (1969) Weight, volume and center of mass of segment of the human body. AMRL T.R. Ohio.
Santos P, Vaz J, Correia P, Valamatos M, Veloso A, Pezarat-Correia P (2021) Intermuscular coordination in the power clean exercise: comparison between olympic weightlifters and untrained individuals-a preliminary study. Sensors (Basel) 21(5): 1904.https://doi.org/10.3390/s21051904
Hasanbarani F, Latash M (2020) Performance-stabilizing synergies in a complex motor skill: analysis based on the uncontrolled manifold hypothesis. Motor Control 24(2): 238–252.https://doi.org/10.1123/mc.2019-0049
Augenstein T, Washabaugh E, Remy C, Krishnan C (2020) Motor modules are impacted by the number of reaching directions included in the analysis. IEEE Trans Neural Syst Rehabil Eng 28(9): 2025–2034.https://doi.org/10.1109/TNSRE.2020.3008565
Mileti I, Serra A, Wolf N, Munoz-Martel V, Ekizos A, Palermo E, Arampatzis A, Santuz A (2020) Muscle activation patterns are more constrained and regular in treadmill than in overground human locomotion. Front Bioeng Biotechnol 8: 581619.https://doi.org/10.3389/fbioe.2020.581619
Cheung V, Cheung B, Zhang J, Chan Z, Ha S, Chen C, Cheung R (2020) Plasticity of muscle synergies through fractionation and merging during development and training of human runners. Nat Commun 11(1): 4356.https://doi.org/10.1038/s41467-020-18210-4
Гельфанд И, Цетлин М (1962) О некоторых способах управления сложными системами. УМН 17.1(103): 3–25. [Gel`fand I, Cetlin M (1962) About some ways of managing complex systems. UMN 17.1(103): 3–25. (In Russ)].
Фельдман А (1979) Центральные и рефлекторные механизмы управления движениями. М. Наука. [Fel`dman A (1979) Central and reflex motion control mechanisms. M. Nauka. (In Russ)].
Sternad D, Marino H, Charles S, Duarte M, Dipietro L, Hogan N (2013) Transitions between discrete and rhythmic primitives in a unimanual task. Front Comput Neurosci 7: 90.https://doi.org/10.3389/fncom.2013.00090
Hogan N, Sternad D (2013) Dynamic primitives in the control of locomotion. Front Comput Neurosci 7: 71.https://doi.org/10.3389/fncom.2013.00071
Overduin S, d’Avella A, Carmena J, Bizzi E (2014) Muscle synergies evoked by microstimulation are preferentially encoded during behavior. Front Comput Neurosci 8: 20.https://doi.org/10.3389/fncom.2014.00020
Дополнительные материалы отсутствуют.
Инструменты
Российский физиологический журнал им. И.М. Сеченова