

Сенсорные системы, 2022, T. 36, № 2, стр. 183-193
О мониторинговом подходе к томографической реконструкции
М. В. Чукалина 1, 2, *, А. С. Ингачева 2, 3, К. Б. Булатов 2, 4, К. О. Кутукова 5, Э. Чех 5, В. В. Арлазаров 2, 4
1 ФНИЦ Кристаллография и фотоника
119333 Москва, Ленинский проспект, 59, Россия
2 Смарт Энджинс Сервис
117312 Москва, проспект 60-летия Октября, 9, Россия
3 Институт проблем передачи информации РАН
127051 Москва, Большой каретный пер., 19, Россия
4 ФИЦ ИУ РАН
119333 Москва, 60-летия Октября, 9, Россия
5 deepXscan GmbH
Дрезден, Германия
* E-mail: chukalinamarina@gmail.com
Поступила в редакцию 14.01.2022
После доработки 28.01.2022
Принята к публикации 04.02.2022
- EDN: RTSVTC
- DOI: 10.31857/S0235009222020032
Аннотация
Метод рентгеновской томографии находит широкое применение в медицине, промышленности, таможенном контроле и, конечно, в научных исследованиях, как неразрушающий метод визуализации внутренней морфологической структуры исследуемых объектов. Каждое из применений накладывает на метод свои ограничения. Так, медицинские применения требуют ограничения дозовой нагрузки на организм, а использование на таможне требует сокращения времени досмотра. Недавно нами был предложен принципиально новый подход к работе с томографическими данными, названный мониторинговой реконструкцией. От классического двухэтапного “съемка по заданному протоколу – реконструкция” предложенный подход отличается тем, что реконструкция цифрового изображения начинает выполняться после съемки нескольких первых проекций (пачки проекций). Следующим этапом проводится анализ промежуточного результата и автоматически принимается решение продолжить съемку следующей “пачки” проекций, или рассматривать результат как финальный и остановить процесс съемки. В статье детально обсуждаются основные принципы мониторингового подхода, определяются функция суммарных потерь, стоимость ошибки реконструкции, стоимость наблюдений. Рассмотрены параметры, влияющие на вид функции стоимости наблюдений в зависимости от области применения метода. Проанализированы результаты модельного мониторингового эксперимента с использованием проекций, собранных на томографической установке с нанометровым разрешением. Показано, что применение подхода мониторинговой реконструкции к данным модельного эксперимента позволило в среднем на 10% уменьшить число требуемых проекций для достижения 5%-ного отклонения от “точного” ответа, по сравнению со случаем классического двухэтапного подхода.
ВВЕДЕНИЕ
Метод компьютерной томографии предназначен для визуализации внутренней структуры объектов неразрушающим образом. Термин “неразрушающее исследование” при рентгеновском зондировании связан с понятиями радиационной безопасности и дозовой нагрузки (Постановление, 2009). Допустимая дозовая нагрузка на человека, помещенного в рентгеновский томограф медицинского назначения (диагностический или терапевтический) (Ota, 2022), или на объекты, помещенные в томографические дефектоскопы (Riis, 2018), установки для контроля багажа (Manerikar, 2021) и исследовательские томографы, существенно различается.
Вопросы оптимизации дозовой нагрузки и времени проведения исследования, которое включает зондирование объекта плюс максимально точную реконструкцию 3D цифрового изображения объекта (Симонов, 2017), являются актуальными по сегодняшний день. Дозовая нагрузка и точность реконструкции связаны между собой, поскольку уменьшение дозовой нагрузки означает либо уменьшение числа регистрируемых томографических проекций (Riis, 2021), либо сокращение времени регистрации одной проекции (Dixon, 2003). В том и в другом случае результат томографической реконструкции с применением классических алгоритмов, типа методов свертки и обратной проекции FBP или FDK (Buzung, 2008), становится непредсказуемым по точности. Поэтому наряду с созданием новых измерительных томографических схем постоянно ведется разработка новых алгоритмов реконструкции, удовлетворяющих требованиям по точности (Dabli, 2021) и быстродействию (Nourazar, 2021).
В данной работе мы исследуем новый мониторинговый подход к томографии (Bulatov, 2020), в котором оптимальность выбранной измерительной схемы и оптимальность применяемого для реконструкции алгоритма могут влиять непосредственно на дозовую нагрузку. Чтобы описать преимущества мониторингового подхода, опишем сначала классический. Классический подход к проведению томографического исследования предполагает последовательное выполнение двух этапов. На первом этапе объект помещается в томограф, и сканирование объекта ведется согласно заданному протоколу. На получаемой в ходе сканирования рентгенограмме могут быть распланированы срезы, подлежащие реконструкции (Хофер, 2010). На втором этапе все рентгенограммы (томографические проекции) передаются в вычислитель, где выполняется второй этап – томографическая реконструкция. Аппаратная и “программная” части метода сегодня уже могут быть разделены. Создатели программного обеспечения предлагают на рынке решения, которые позволяют производителям томографического оборудования подключать ПО непосредственно к измерительной аппаратуре. Однако зафиксированный протокол измерения фиксирует и дозовую нагрузку на объект, т.е. для создания оптимизированного с точки зрения дозовой нагрузки протокола съемки необходимо обладать максимально доступной информацией, не только об измерительной части, но и об объекте исследования (Prodi, 2021). Проиллюстрируем это на примере. Во время дентальной томографической съемки пациенту плохо зафиксировали челюсть. При условии дрожания или шевеления челюстью порождаются некачественные проекции, которые будут переданы на реконструкцию. Качество реконструкции не удовлетворяет врача и, как правило, такому пациенту будет назначено повторное сканирование. Как результат – удвоится дозовая нагрузка. Причем неудовлетворительное сканирование не всегда найдет свое место в системе мониторинга количества сканирований. Если бы томографическая реконструкция началась после съемки первых нескольких проекций, то факт плохой фиксации челюсти можно было бы отследить. Мониторинговый подход в томографии предполагает следующую модель томографического процесса. Данная модель описывает процесс томографической реконструкции any-time алгоритмом. Any-time алгоритм – это алгоритм, который может вернуть действительное решение проблемы, даже если выполнение алгоритма было прервано до его завершения. Например, останов в работе алгоритма произошел в момент, когда стоимость дальнейших вычислений (с точки зрения времени или других параметров) стала высокой по отношению к стоимости ошибки. Тогда задача томографии формулируется следующим образом. Необходимо автоматически определить точку остановки при регистрации рентгенограмм, которая соответствует одному из двух случаев: достигнута ли требуемая точность реконструкции для зондируемого объекта и получено ли заключение о невозможности достигнуть заданной точности. Так как точность реконструкции, которая зависит не только от количества собранных проекций (что оказывается определяющим), не может непрерывно расти, то в текущих условиях съемки конкретного объекта существует минимально требуемое количество проекционных углов для достижения требуемой точности, или точность никогда не будет достигнута.
МЕТОДИКА ИССЛЕДОВАНИЙ
Модель процесса мониторинговой реконструкции
Рассмотрим процесс томографической реконструкции как процесс с контролируемым результатом. Основы данного подхода детально описаны в работе (Bulatov, 2020). Задача мониторинговой реконструкции может быть сформулирована следующим образом: необходимо остановить процесс томографического сканирования ровно в тот момент, когда достигнута требуемая точность реконструкции, но еще не достигнут предел допустимого значения стоимости измерений.
Стоимость томографичеких измерений будем описывать некоторой функцией. Вид этой функции определяется областью, в которой применяется томографический метод, и вид функции будет отличаться от применения к применению. Чтобы разъяснить ситуацию, рассмотрим два примера применения. Первый пример – в томограф помещается живой объект. Величина радиационной нагрузки (Little, 2022) начинает играть решающую роль, т.е. измерение дополнительной проекции должно увеличивать значение функции стоимости. Второй пример – рассмотрим случай томографических измерений c высоким разрешением. Для индустриальных приложений решающим становится вопрос времени сканирования. Измерение объекта размером пять микрон с разрешением десять нанометров на источнике синхротронного излучения заняло полтора часа (Andrade, 2021). На лабораторном томографе в схожей оптической схеме результаты с нанометровым разрешением удается получить за десятки часов. Количество проекционных углов в используемых протоколах сканирования было равно нескольким тысячам. Такие условия делают неприемлемым использование томографического метода сегодня в качестве диагностического инструмента для контроля с высоким разрешением внутренней структуры функциональных приборов в полупроводниковой и микроэлектронной промышленности. Во втором случае функция стоимости должна описывать время. Причем для разных томографических установок время будет разным. Для томографов с быстрой автоматической юстировкой это только время измерения одной проекции. В противном случае время юстировки системы источник–образец–детектор для очередного проекционного угла суммируется со временем измерения проекции.
К вопросу точности томографической реконструкции обращались и обращаются множество исследователей на протяжении нескольких десятилетий (Наттерер, 1990; Gladilin, 2014; Nikolaev, 2016; Симонов, 2017; Mitsuyama, 2022). Точность томографической реконструкции, например, медицинских изображений, легко оценить, если измерения проводились на антропоморфных тканеэквивалентных фантомах. Проводят сравнение 3D распределения КТ-индексов фантома и результата реконструкции. Однородность областей восстановленного объема можно оценить интегрально на всем восстановленном объеме или только в отдельных интересующих врача областях; если в объекте произошло смещение, его легко локализовать; определить четкость края границы и прочее. Каждый из перечисленных признаков на медицинском изображении говорит о наличии или об отсутствии у пациента фактора риска или группы факторов. Приведенный выше список параметров является репрезентативной, но сильно укороченной версией полного списка, параметрами которого можно охарактеризовать медицинское изображение. Значения этих параметров врачи анализируют при постановке диагноза (Хофер, 2010). Измерения на фантомах используются при построении функциональной зависимости величины интегрального или локального критерия, используемого для оценки точности реконструкции, от параметров режима съемки томографа (напряжения, тока). Для исследования патологий анатомических структур (шеи, головы, грудной клетки или брюшной полости) используются разные локальные критерии. В данной статье мы не будем останавливаться на классификации интегральных и локальных критериев точности реконструкции, а воспользуемся далее в численных экспериментах абсолютным значением среднеквадратичного отклонения восстановленного изображения от “идеала”. Поскольку проведенный нами численный эксперимент не включает измерений на фантомах, определение “идеала” будет дано в разделе описания численного эксперимента. Таким образом, нами введены понятия функции стоимости измерений и точности реконструкции. Чтобы формализовать задачу мониторинговой реконструкции объекта θ по проекциям X, регистрируемым последовательно, но согласно реализуемому протоколу, определим функцию суммарных потерь L:
(1)
${{L}_{n}}(\theta ,{{x}_{1}},...,{{x}_{n}}) = \epsilon ({{R}_{n}}({{x}_{1}},...,{{x}_{n}})) + {{c}_{n}}({{x}_{1}},...,{{x}_{n}}).$Здесь $\theta \in \Theta $ – объект исследования, n – текущее число уже собранных от объекта проекций, Rn – изображение, восстановленное по n проекциям, $\epsilon $ – ошибка реконструкции, cn – суммарная стоимость проведенных n измерений. Ошибкой реконструкции далее будем называть абсолютное значение среднеквадратичного отклонения текущего восстановленного изображения от “идеала” Rideal:
Если любой новый сканируемый объект с высокой степенью точности аппроксимировать каким-то фантомом из набора доступных фантомов, то протоколы съемки можно табулировать, решив для каждого из фантомов единожды задачу (1) для функций ошибки и стоимости фиксированного вида. Это и есть путь построения протокола для томографического устройства-дефектоскопа, установленного на производственном конвейере, но наборы томографических проекций, собранных во время сканирования людей, различаются. Во-первых, анатомическое строение каждого отдельного человека отличается в той или иной мере от антропоморфного фантома. Во-вторых, как было упомянуто во введении со ссылкой на стоматологический случай, человеку бывает трудно находиться в неподвижном состоянии. Наборы проекций, снятые на одном и том же приборе в одном и том же режиме, порой для одного и того же человека, оказываются различны, т.е. вектор собранных проекций – величина случайная. Для того, чтобы восстанавливать изображения с заданной точностью, может потребоваться разное число проекций при разных томографических съемках.
Модель процесса реконструкции с мониторингом, предложенная в работе (Bulatov, 2020), позволяет рассматривать процесс томографической реконструкции как any-time алгоритм. На рис. 1 представлена принципиальная схема any-time алгоритма, которая описывается последовательностью шагов:
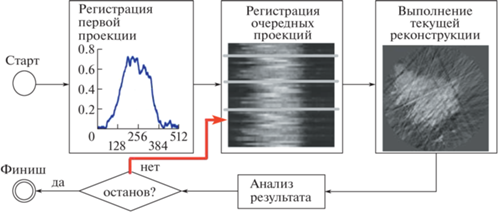
1 – регистрация нескольких томографических проекций (количество проекций является входным параметром алгоритма K, K = 1, 2…), согласно выбранной последовательности проекционных углов;
2 – выполнение реконструкции выбранным алгоритмом реконструкции (Натеррер, 1990; Buzung, 2008);
3 – проверка условий правил остановки;
4 – если условия не выполнены, то переходим к шагу 1; если условия выполнены, то процесс реконструкции завершается.
Наличие функции ошибки $\epsilon ({{R}_{n}}({{x}_{1}},...,{{x}_{n}}))$ в выражении суммарных потерь (1) свидетельствует о том, что существует количественная оценка, позволяющая сделать вывод о состоянии решаемой задачи. Все свойства any-time алгоритмов сформулированы и проклассифицированы в работе (Zilberstein, 1996). Из предполагаемого свойства монотонности должно следовать, что значение ошибки уменьшается с увеличением n. Это свойство используется для выбора количества проекций, измеряемых за один шаг алгоритма. Невыполнение этого условия может свидетельствовать о возникших во время измерения проекций проблемах и служить указанием к остановке процесса сканирования. Даже при отсутствии ограничений на время вычислений и на объем вычислительных ресурсов можно выделить три основные момента при выборе алгоритма реконструкции в any-time алгоритме. Первый момент связан с используемой схемой сканирования. Для схемы томосинтеза, круговой и спиральной схем, используемых для сбора томографических проекций, разработаны разные алгоритмы. Следующий момент – это уровень шума в измеряемых проекциях. Итерационные методы с регуляризацией являются более устойчивыми при наличии высокого уровня шума. Еще одним важным фактором, который следует учитывать при выборе алгоритма, – это потенциальная возможность проводить измерения в диапазоне углов от 0 до 180°. Если такой возможности нет, то не следует использовать интегральные методы, поскольку это отодвинет точку остановки от начала съемки.
Описание правил остановки. Как было сказано выше, вектор зарегистрированных томографических проекций – это случайный вектор X = (X1, X2, …). Каждой последовательности зарегистрированных проекций (реализаций) $({{x}_{1}},{{x}_{2}},...,{{x}_{n}})) \in {{\chi }^{n}}$, собранных от объекта θ, поставим в соответствие результат томографической реконструкции ${{R}_{n}}({{x}_{1}},...,{{x}_{n}})$. Реконструкция выполняется после регистрации K проекций. Пусть K = 1, тогда реконструкция выполняется после очередной вновь измеренной проекции. Для каждого момента времени n мы имеем последовательность функций стоимости наблюдений C = (c0, c1(x1), c2(x1, x2), …). Причем значение функции стоимости растет с числом проведенных измерений
(3)
${{c}_{n}}({{x}_{1}},{{x}_{2}},...,{{x}_{n}}) < {{c}_{{n + 1}}}({{x}_{1}},{{x}_{2}},...,{{x}_{n}},{{x}_{{n + 1}}}).$Удобно рассмотреть построение правила остановки на конкретном примере. Пусть функция стоимости наблюдений растет пропорционально числу измеренных проекций
Данное выражение хорошо описывает множество медицинских приложений томографического метода. Измерение очередной проекции увеличивает полученную пациентом дозу. Если время экспозиции (время измерения одной проекции) постоянно, то увеличение дозовой нагрузки хорошо аппроксимируется выражением (4).
Сформулируем правило остановки последовательностью функций ϕ = (ϕ0, ϕ1(x1), ϕ2(x1, x2), …), определенных на χn и 0 ≤ ϕn(x1, x2, …, xn) ≤ 1, n = 0, 1, 2, … Величина ϕ0 – это вероятность не собрать ни одной проекции. Если задано правило остановки, то может быть определена случайная величина N, которая определяет момент остановки измерений. Правило остановки – это условная вероятность того, что при собранных проекциях x1, x2, …, xn останов произойдет в момент времени N, при условии, что не произошел раньше:
(5)
${{\phi }_{n}}({{x}_{1}},...,{{x}_{n}}) = P(N = n{\text{|}}N \geqslant n,{{X}_{1}} = {{x}_{1}},...{{X}_{n}} = {{x}_{n}}).$Функции вероятности (вероятность того, что останов произойдет в момент времени N) при реализованных наблюдениях (собранных проекциях) X1 = x1, X2 = x2, … определяются как ψ = = (ψ0, ψ1(x1), ψ2(x1, x2), …), где
(6)
$\begin{gathered} {{\psi }_{n}}({{x}_{1}},...,{{x}_{n}}) = P(N = n{\text{|}}{{X}_{1}} = {{x}_{1}},...{{X}_{n}} = {{x}_{n}}), \\ {{\psi }_{\infty }}({{x}_{1}},{{x}_{2}}...) = P(N = \infty {\text{|}}{{X}_{1}} = {{x}_{1}},{{X}_{2}} = {{x}_{2}},...). \\ \end{gathered} $Функции вероятности (вероятность остановки в момент времени N) при реализованных наблюдениях X1 = x1, X2 = x2, … и правила остановки связаны следующим соотношением:
ψ0 = ϕ0,
(7)
$\begin{gathered} {{\psi }_{n}}({{x}_{1}},...,{{x}_{n}}) = {{\phi }_{n}}({{x}_{1}},...,{{x}_{n}})\prod\limits_{i = 0}^{n - 1} {(1 - {{\phi }_{i}}({{x}_{1}},...,{{x}_{i}},))} , \\ {{\psi }_{\infty }}({{x}_{1}},{{x}_{2}}...) = 1 - \prod\limits_{i = 0}^\infty {{{\phi }_{i}}({{x}_{1}},...,{{x}_{n}})} . \\ \end{gathered} $Задача остановки включает выбор такого правила остановки ϕ, чтобы оно минимизировало ожидаемые потери V(ϕ) при любой реализации случайного вектора зарегистрированных проекций:
(8)
$V(\phi ) = E\left( {\sum\limits_{n = 0}^\infty {{{\psi }_{n}}({{X}_{1}},...,{{X}_{n}})} L({{X}_{1}},...,{{X}_{n}})} \right).$В терминах случайного времени остановки, ожидаемые потери могут выражаться следующим образом:
Одним из специальных случаев задач остановки является класс монотонных задач с конечным горизонтом (Ferguson, 2008). Понятие “задачи с конечным горизонтом” предполагает, что существует шаг, на котором процесс гарантированно остановится. Класс монотонных задач предполагает, в случае, если ожидаемые потери на текущем шаге не превосходят ожидаемых потерь на следующем шаге, то это будет сохраняться на всех последующих шагах процесса. Для монотонных задач остановки существует оптимальное правило, так называемое “близорукое” правило:
где Ln − потери на шаге n, а En – математическое ожидание при условии, что первые n наблюдений собраны. В работе (Bulatov, 2019) показано, что в случае, если слагаемое функции суммарных потерь, отражающее точность результата $\epsilon $, представляет из себя расстояние от текущего результата реконструкции до “идеала”, согласно некоторой метрике, и если расстояния между соседними результатами реконструкции в той же метрике преимущественно убывают, “близорукое” правило может быть аппроксимировано следующим образом:(11)
${{N}_{\Delta }} = \min \{ n \geqslant 0:{{E}_{n}}(\rho ({{R}_{n}},{{R}_{{n + 1}}})) \leqslant {{E}_{n}}({{c}_{{n + 1}}}) - {{c}_{n}}\} .$Здесь в левой части неравенства ожидаемое на момент n отклонение результата текущей реконструкции от результата на следующем шаге, а в правой части неравенства – ожидаемая стоимость следующего наблюдения. Поскольку расстояния между двумя последовательными результатами томографической реконструкции в терминах используемой метрики (2) уменьшаются со временем, воспользуемся методом прогнозирования одномерных временных рядов. Ожидаемое отклонение близко к отклонению между двумя последними полученными результатами:
(12)
${{E}_{n}}({{\left\| {{{R}_{n}} - {{R}_{{n + 1}}}} \right\|}_{2}}) \approx \;{{\left\| {{{R}_{{n - 1}}} - {{R}_{n}}} \right\|}_{2}}{\kern 1pt} .$Согласно выбранной выше модели расчета стоимости наблюдений разница между ожидаемым значением функции стоимости на следующем этапе процесса и значением на данном этапе равна константе:
В следующем разделе представлены результаты численного эксперимента, проведенного с использованием набора экспериментальных томографических проекций, собранных на лабораторном нанотомографе (Topal, 2020). Томографируемый объект представлял собой систему на основе переходных металлов (Zang, 2017).
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТА
Численный эксперимент по мониторинговой реконструкции
Результат томографической реконструкции системы, выполненный с использованием полного набора проекций. В ходе томографического эксперимента была зарегистрирована 801 проекция. Проекции регистрировались с равномерным шагом, в диапазоне углов 0–180°. Программное обеспечение Smart Engines (https://smartengines.com/ ocr-engines/tomo-engine/) было использовано для реконструкции 3D цифрового изображения методом свертки и обратной проекции (рис. 2).
Рис. 2.
Результат томографической реконструкции, выполненной с использованием полного набора томографических проекций.

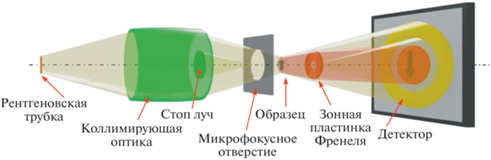
Установка Xradia nano-XCT 100, оснащенная источником рентгеновского излучения с вращающимся анодом (излучение Cu-Kα, энергия фотонов 8 кэВ), использовалась для сбора проекций. Установленная в оптическом тракте зонная пластинка Френеля с фокусным расстоянием 18 см обеспечила пространственное разрешение порядка 65 нм. Фактический размер изображения на сцинтилляционном экране составляет 680 × × 680 мкм2. Система передачи, включающая две линзы с разным увеличением 40× и 10, передает изображение на камеру размером 1024 × 1024 пиксела. Образец размером 35 × 35 × 35 мкм3 был укреплен на вольфрамовой игле. Принципиальная схема томографической установки представлена на рис. 3.
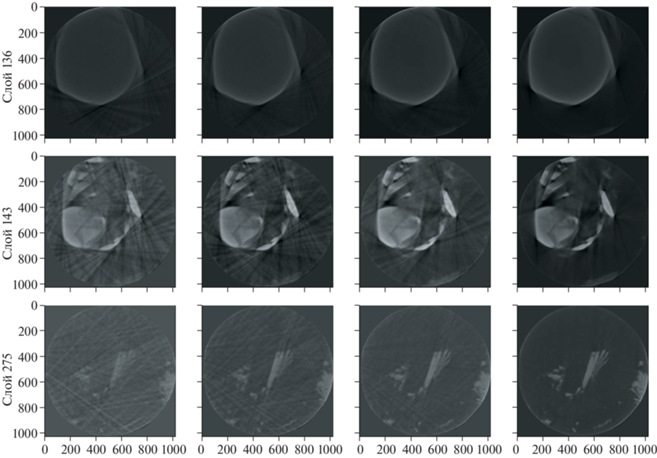
Модельный эксперимент был организован следующим образом. Из полного набора восстановленных горизонтальных сечений объекта были выбраны 136, 143 и 275-й слои. Из рентгенограмм (томографических проекций) были выделены синограммы, используемые далее в модельном эксперименте для реконструкции соответствующих слоев. Динамика изменения морфологии восстановленных сечений в зависимости от количества использованных проекционных углов представлена на рис. 4. Количество использованных для реконструкции проекционных углов было 100, 200, 400 и 800 слева направо соответственно.
Рис. 4.
Результат реконструкции трех сечений из полного набора проекционных углов. Слева направо: 100, 200, 400 и 801 угол использованы для реконструкции соответственно.
Полный набор проекционных углов был использован для определения диапазона изменения константы с. Далее для каждой синограммы и каждого значения с были рассчитаны моменты остановки с использованием подхода мониторинговой реконструкции. Полученный результат, усредненный по трем сечениям, представлен на рис. 5 кривой красного цвета.
Рис. 5.
Сравнение результатов эксперимента с мониторинговой реконструкцией и результатов эксперимента с принудительной остановкой процесса сканирования.
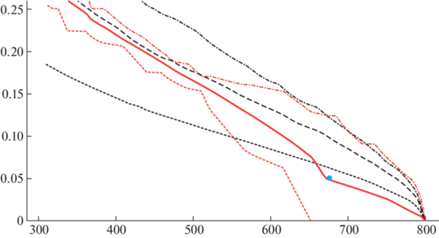
Штрихпунктирная красная линия на рисунке показывает положения выбранных из трех значений максимумов, а красная пунктирная линия – положения минимумов. Точки на кривой, показанной черной толстой пунктирной линией, были рассчитаны следующим образом. Для каждого из значений оси х (это число проекционных углов) выполнялась реконструкция всех трех сечений. Далее рассчитывалась метрика, согласно выражению (2), и полученные значения метрики усреднялись. В качестве “идеала” было использовано изображение соответствующего сечения, восстановленное по синограмме, включающей 801 угол. Тонкая штрихпунктирная черная линия на рисунке описывает расположение максимальных из трех рассчитанных значений метрик для каждого из значений оси абсцисс, а тонкая пунктирная – минимальных значений.
Обратимся к синей точке на красной кривой. Она соответствует случаю X = 672, Y = 0.05, C = = 0.028, т.е. для того, чтобы достигнуть уровня ошибки реконструкции в 5%, any-time алгоритму потребовалось 672 проекции, чтобы принять решение об останове. Если бы мы восстановили все три сечения, используя для каждого только 672 проекции, то в среднем ошибка составила бы чуть более 10%. Этот случай соответствует точке (672, 0.11) на пунктирной кривой, отмеченной красной стрелкой. Для того, чтобы достигнуть в среднем ошибки в 5%, количество проекций необходимо увеличить до 760. Этот случай соответствует точке (760, 0.05) на пунктирной кривой, отмеченной синей стрелкой.
Проведенный эксперимент подтвердил, что использование мониторингового подхода в среднем позволяет уменьшить требуемое количество проекций для достижения требуемой точности реконструкции.
ЗАКЛЮЧЕНИЕ
В данной работе проанализирован мониторинговый подход к работе с данными рентгеновской томографии (Арлазаров, 2021). Метод, позволяющий визуализировать внутреннюю морфологическую структуру объектов неразрушающим способом (за который в XX веке была присуждена нобелевская премия), в своей классической постановке является двухэтапным. На первом этапе от объекта собирается набор томографических проекций (рентгенограмм) под несколькими углами, называемыми проекционными. На втором этапе выполняется томографическая реконструкция, т.е. восстанавливается 3D (для стационарного объекта) или 4D (для динамического объекта) цифровое изображение. Недавно предложенный в томографии мониторинговый подход (Bulatov, 2020) подразумевает другую последовательность шагов. Процесс описывается any-time моделью, т.е. процесс сканирования может быть остановлен в любой момент, как только собранных проекций хватает для восстановления изображения заданной точности. Правило остановки включает оценку величины функций стоимости наблюдений и ошибки реконструкции.
В данной работе на модельном примере продемонстрировано, что в случае, если томографический процесс может быть рассмотрен как процесс с ограничением на дозовую нагрузку, а степень точности реконструкции контролируется динамикой поведения среднеквадратичного отклонения текущего восстановленного изображения, то алгоритм мониторинговой реконструкции демонстрирует, что в среднем требуется на 10% меньше проекций для достижения 5%-ной ошибки по точности, чем в случае применения классического протокола. В дальнейшем мы планируем исследовать робастность предложенного алгоритма, дополнив эксперимент данными с худшим отношением сигнал–шум, расширить класс используемых метрик и увеличить количество параметров при построении функции стоимости наблюдения.
Список литературы
Постановление Главного государственного санитарного врача РФ от 07.07.2009 № 47 “Об утверждении СанПиН 2.6.1.2523-09” (вместе с “НРБ-99/2009. СанПиН 2.6.1.2523-09. Нормы радиационной безопасности. Санитарные правила и нормативы”) (Зарегистрировано в Минюсте РФ 14.08.2009 № 14534).
Гладилин C.А., Котов А.А., Николаев Д.П., Усилин С.А. Построение устойчивых признаков детекции и классификации объектов, не обладающих характерными яркостными контрастами. ИТиВС. 2014. № 1. С. 53–60.
Наттерер Ф. Математические аспекты компьютерной томографии. М.: Мир, 1990. 105 с.
Симонов Е.Н., Аврамов М.В., Аврамов Д.В. Анализ трехмерных алгоритмов реконструкции в рентгеновской компьютерной томографии. Вестник ЮУрГУ. Серия Компьютерные технологии, управление, радиоэлектроника. 2017. Т. 17. № 2. С. 24–32. https://doi.org/10.14529/ctcr170202
Хофер М. Компьютерная томография. Базовое руководство. 3-е издание. М.: Медицинская литература, 2010. 232 с.
Arlazarov V.L., Nikolaev D.P., Arlazarov V.V., Chukalina M.V. X-ray tomography: the way from layer-by-layer radiography. Computer Optics. 2021. V. 45 (6). P. 897–906. https://doi.org/10.18287/2412-6179-CO-898
De Andrade V., Nikitin V., Wojcik M., Deriy A., Bean S., Shu D., Mooney T., Peterson K., Kc P., Li K., Ali S., Fezzaa K., Gürsoy D., Arico C., Ouendi S., Troadec D., Simon P., De Carlo F., Lethien C. Fast X-ray Nanotomography with Sub-10 nm Resolution as a Powerful Imaging Tool for Nanotechnology and Energy Storage Applications. Adv. Mater. 2021. V. 33 (21): e2008653. Epub 2021 Apr 19. https://doi.org/10.1002/adma.20200865333871108
Bulatov K., Razumnyi N., Arlazarov V.V. On optimal stopping strategies for text recognition in a video stream as an application of a monotone sequential decision model. IJDAR. 2019. V. 22 (3). P. 303–314. https://doi.org/10.1007/s10032-019-00333-0
Bulatov K., Chukalina M., Buzmakov A., Nikolaev D., Arlazarov V.V. Monitored Reconstruction: Computed Tomography as an Anytime Algorithm. IEEE Access. 2020. V. 8. P. 110759–110774. https://doi.org/10.1109/ACCESS.2020.3002019
Buzung T.M. Computed Tomography. From photon statistics to modern cone-beam CT. Springer-Verlag Berlin Heidelberg. 2008. 521 p.
Dabli D., Frandon J., Belaouni A., Akessoul P., Addala T., Berny L., Beregi J-P., Greffier J. Optimization of image quality and accuracy of low iodine concentration quantification as function of dose level and reconstruction algorithm for abdominal imaging using dual-source CT: A phantom study. Diagnostic and Interventional Imaging. 2021. V. 103 (1). P. 31–40. https://doi.org/10.1016/j.diii.2021.08.004
Dixon R.L. A new look at CT dose measurement: Beyond CTDI. Medical Physics. 2003. V. 30 (6). P. 1272–1280. https://doi.org/10.1118/1.1576952
Ferguson T.S. Optimal stopping and applications. 2008. [Online]. Available: https://www.math.ucla.edu/~tom/Stopping
Little M.P., Patel A., Lee C., Hauptmann M., Berrington de Gonzalez A., Albert P., Impact of Reverse Causation on Estimates of Cancer Risk Associated With Radiation Exposure From Computerized Tomography: A Simulation Study Modeled on Brain Cancer. American Journal of Epidemiology. 2022. V. 191 (1). P. 173–181. https://doi.org/10.1093/aje/kwab247
Manerikar A., Li F., Kak A.C. DEBISim: A simulation pipeline for dual energy CT-based baggage inspection systems. Journal of X-Ray Science and Technology. 2021. V. 29 (2). P. 259–285. https://doi.org/10.3233/XST-200808
Mitsuyama Y., Katayama Y., Oi K., Shimazaki Ji., Mimura K., Endo M., Shimazu N. The accuracy of contrast-enhanced computed tomography scans to detect postpartum haemorrhage: an observational study. BMC Pregnancy Childbirth. 2022. V. 22 (67). P. 1–9. https://doi.org/10.1186/s12884-021-04306-2
Nikolaev D.P., Buzmakov A., Chukalina M., Yakimchuk I., Gladkov A., Ingacheva A. “CT Image Quality Assessment based on Morphometric Analysis of Artifacts”. SPIE 10253. 2016. P.10253–06. https://doi.org/10.1117/12.2266268
Nourazar M., Goossens B. Accelerating iterative CT reconstruction algorithms using Tensor Cores. Journal Real-Time Image Processing. 2021. N. 18. P. 1979–1991. https://doi.org/10.1007/s11554-020-01069-5
Ota J., Yokota H., Kobayashi T., Ogata Yu., Kubo T., Chida K., Masuda Yo., Uno T. Head CT dose reduction with organ-based tube current modulation. Medical Physics. 2022. https://doi.org/10.1002/mp.15467
Prodi E., Danieli L., Manno C., Pagnamenta A., Pravatà E., Roccatagliata L., Städler S., Cereda C.W., Cianfoni A. Stroke Mimics in the Acute Setting: Role of Multimodal CT Protocol. American Journal of Neuroradiology. 2021. https://doi.org/10.3174/ajnr.A7379
Riis N.A., Frosig J., Dong Y., Hansen P.S. Limited-data X-ray CT for underwater pipeline inspection. Inverse Problems. 2018. V. 34 (3). P. 034002. https://doi.org/10.1088/1361-6420/aaa49c
Riis N.A.B., Dong Yi., Hansen P.C. Computed tomography with view angle estimation using uncertainty quantification. Inverse Problems. 2021. V. 37 (6). P. 065007. https://doi.org/10.1088/1361-6420/abf5ba
Topal E., Liao Z., Loeffler M., Gluch J., Zhang J., Feng X., Zschech E. Multi–scale X–ray Tomography and Machine Learning Algorithms to Study MoNi4 Electrocatalysts Anchored on MoO2 Cuboids Aligned on Ni Foam. BMC Materials. 2020. V. 2 (5). P. 1–14. https://doi.org/10.1186/s42833-020-00011-0
Zhang J., Wang T., Liu P., Liao Z., Liu S., Zhuang X., Chen M., Zschech E., Feng X. Efficient Hydrogen Production on MoNi4 Electrocatalysts with Fast Water Dissociation Kinetics. Nature Communications. 2017. V. 8 (1547). P. 1–8. https://doi.org/10.1038/ncomms15437
Zilberstein S. Using anytime algorithms in intelligent systems. AI Magazine. 1996. V. 17 (3). P. 73–83. https://doi.org/10.1609/aimag.v17i3.1232
Дополнительные материалы отсутствуют.
Инструменты
Сенсорные системы