

Сенсорные системы, 2022, T. 36, № 3, стр. 262-274
Точность определения координат надводной поверхности на основе фотограмметрических измерений снимка с наклонной проекцией
1 ФГАОУ ВО “Санкт-Петербургский политехнический университет Петра Великого”
195251 Санкт-Петербург, ул. Политехническая, д. 29, Россия
* E-mail: Kvasnov_AV@spbstu.ru
Поступила в редакцию 20.11.2021
После доработки 29.01.2022
Принята к публикации 05.02.2022
- EDN: CMVLAB
- DOI: 10.31857/S0235009222030039
Аннотация
В статье представлено исследование точности определения координат надводной поверхности с использованием камеры с наклонной проекцией снимка. Проблема измерений на мультиспектральных фотоизображениях, позволяющих на основе фотограмметрии оценивать координаты местности (особенно вблизи линии горизонта) с заданной потенциальной точностью, до сих пор недостаточно изучена. В рамках проективной геометрии сформулирована теоретическая постановка задачи. Научная новизна исследования заключается в аналитическом решении задачи по расчету координат относительно линии горизонта и демонстрации прикладных особенностей реализации для надводной поверхности. Показано, что влияние крутизны Земли на точность определения координат для проекционного снимка, полученного на фиксированных высотах в диапазоне 100–10000 м, не превышает величины 1% относительно “плоской” подстилающей поверхности. Сходимость объектов на проекционном снимке к видимой линии горизонта существенно сокращает точность измерений их координат. Для горизонтального изображения со средним разрешением 640 × 512 эта величина не превышает 5–10% от возможной дальности. В статье проведено имитационное моделирование и продемонстрирован подход по созданию фотограмметрических зон, относительно которых изменяется точность координат подстилающей поверхности.
ВВЕДЕНИЕ
Современное развитие систем дистанционного зондирования земной поверхности в первую очередь связано с внедрением беспилотных летательных аппаратов (БПЛА). БПЛА являются мощным инструментом мониторинга и освещения наземной и надводной обстановки за счет использования роботизированных аппаратных средств, а также программного обеспечения, реализующего функции искусственного интеллекта (Colomina et al., 2014). Как правило, комплексы БПЛА располагают датчиками, имеющими различные физические принципы сканирования (радары в режиме синтезированной апертуры (РСА), сонары, лазерные дальномеры, фотокамеры и многое другое) (Kvasnov et al., 2021). В задачи БПЛА, помимо регистрации данных, входит решение следующих проблем:
– детектирование, сегментация и распознавание наземных объектов на основе мультиспектральных характеристик, полученных с камеры (Кваснов, 2021);
– создание ортофотоснимков и панорамных изображений подстилающей поверхности (Кваснов, 2017);
– фотограмметрическое исследование объектов, расположенных вдоль траектории движения БПЛА (Colomina et al., 2014).
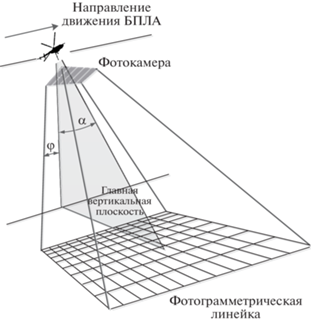
Последняя задача актуальна тем, что позволяет создавать виртуальные 3D-модели подстилающей поверхности, тем самым увеличивая возможности по более точному распознаванию объектов на основе масштаба и размеров сегментируемых областей. Использование фотограмметрии для анализа карт является очень эффективным, быстрым, дешевым и безопасным методом, особенно он позволяет проводить съемку и наблюдение за объектами без физического контакта (Лобанов, 1984). С широким использованием компьютерного программного обеспечения, основанного на математических моделях, эту технологию стало выгодно применять для количественного измерения планов местности и карт (рис. 1).
Одной из важных прикладных задач фотограмметрии остается оценка точности координат в случае мониторинга наземной и надводной обстановки. Дело в том, что потенциальная точность зависит от ряда факторов:
– погрешности измерений местоположения камеры навигационными средствами БПЛА (высота полета, угол места);
– технических характеристик камеры (разрешение, фокусное расстояние, глубина съемки);
– рельефа подстилающей поверхности (мониторинг ровной поверхности, наличие возвышенностей и низин).
В этой области знаний существует ряд проблем (Liu et al., 2021). Во-первых, “пассивное” дистанционное зондирование фотокамерой не способно корректно оценить рельеф местности, поэтому полученные результаты могут существенно отличаться от истинных значений (Shen et al., 2015). Наиболее оптимальным решением является применение инфракрасной камеры как эффективного дальномерного инструмента (Telling et al., 2017; Кваснов, 2020). Другая проблема заключается в том, что дисторсия изображений, кривизна Земли и рефракция волн в видимом диапазоне также влияют на точность привязки координат. Очевидно, что фотограмметрия надводной поверхности обладает преимуществом по причине отсутствия рельефа местности.
Существенной проблемой остается недостаточная точность измерений координат на уровне линии горизонта, оцениваемого на основании пространственного положения БПЛА и технических характеристик камеры, используемых для съемки. Данная проблематика освещена в научном исследовании (Shen et al., 2015), где рассматривается геопривязка фотоизображений с наклонной проекцией к участку местности. Пространственное положение объектов земной поверхности с учетом особенностей аэрофотосъемки проработано в следующих научных изданиях по фотограмметрии (Гаврилова и др., 2016; Обиралов и др., 2006). К сожалению, отечественные научные работы крайне скудны в этой области (Хлебникова и др., 2018).
В зарубежных работах более глубоко и широко представлены данные исследования. Прямая пространственная привязка наклонных и вертикальных изображений в разных системах координат анализируется в статье (Shen et al., 2015). На основе установленной взаимосвязи между смещением движения камеры вдоль направления фотографирования и изменением количества пикселей между опорными точками может решаться проблема пространственного измерения координат (Hsu et al., 2011).
В работе (Zhou et al., 2021) предложен метод по выбору оптимальных изображений текстуры фасада здания (BFTI – Building Facade Texture Images), который позволяет создавать фотореалистичные 3D-объекты на основе мультиспектральной камеры БПЛА M600 Pro. Координатная привязка на основе полученных снимков с наклонной проекцией демонстрируется в исследовании (Rau et al., 2015), где основное внимание уделяется анализу “облака точек”, обеспечивающих классификацию зданий. Эффективность в этом случае достигает 82.4–91.8%.
Можно констатировать, что исследования в данной области касаются преимущественно только отдельных объектов на изображении. Согласно полученным результатам в приведенных выше работах, мы не можем проследить “эволюции” точности координат подстилающей поверхности, ограниченной рассматриваемой экспозицией изображения. В этом смысле вызывает интерес исследование, посвященное анализу зависимостей между двумерными координатами изображения и реальными трехмерными координатами Земли, фиксируемыми камерой БПЛА.
Цель данной работы – оценка потенциальной точности измерений надводной поверхности при помощи фотограмметрической камеры БПЛА, осуществляющей мониторинг под заданным наклонным углом проекции. Требуется численно оценить изменение координат в контексте проекционного изображения, полученного для съемки линии горизонта с заданным фокусным расстоянием. Таким образом, научная новизна работы обоснована впервые учтенным условием наличия линии горизонта, что не рассматривается в других работах, посвященных исследуемой задаче.
Стоит отметить, что на сегодняшний день существуют готовые программные продукты, обеспечивающие решение задач по созданию 3D-моделей земной поверхности на основе облака точек. В частности, программа Agisoft PhotoScan, которая позволяет обеспечивать точность только при тщательном подборе параметров обработки (Хабарова и др., 2019). Из программных продуктов для БПЛА, обеспечивающих работу с ортофотопланами, следует отметить Pix4Dmapper. Для простых решений, использующих гражданские фотокамеры, применяется программа “Contex Capture”. В настоящее время перспективной технологией является применение облака точек, полученных в результате фотограмметрических измерений, для классификации наземных объектов (Rau et al., 2015).
Важно отметить, что все предложенные программные продукты объединяет общая особенность: фотографирование подстилающей поверхности производится для малых углов места (не более 30 град). Очевидно, что это связано непосредственно с отсутствием исследований, касающихся фотограмметрической области для больших углов места вообще, и области вдоль линии горизонта в частности. Таким образом, актуальность предложенного исследования вполне очевидна и ее прикладной характер способствует развитию направления “дальней” фотограмметрии в реальных программных продуктах.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Известно, что современные комплексы БПЛА обладают достаточно хорошими техническими характеристиками в оценке стабилизации положения, позволяющей удерживать летательный аппарат в точке с погрешностью полметра по высоте и один метр по горизонтали (Хабарова и др., 2019). Учитывая тот факт, что расчет координат ведется для наклонной проекции со значениями угла места более 30 град, потенциальная точность фотограмметрических измерений определяется в первую очередь ориентацией камеры и качеством бортовой оптики. Исходя из этого, рассмотрим наиболее часто используемые типы фотограмметрических камер.
Для создания фотоизображений подстилающей поверхности в настоящее время используются фотокамеры различных конструктивных исполнений и функционального назначения. Можно выделить следующие типы камер (Colomina et al., 2014):
– камеры видимого диапазона малого формата и среднего формата (Phase One, iXA 180, Trimble);
– мультиспектральные камеры для БПЛА (Tertracam, MiniMCA-6, Condor-5 UAV-285);
– гиперспектральные камеры для БПЛА (Rikola, Headwall Photonics);
– тепловизионные камеры для БПЛА (FLIR, TAU 2 640).
Наиболее распространенными и востребованными камерами являются камеры видимого диапазона, для которых существует ряд основных характеристик, приведенных в табл. 1.
Таблица 1.
Технические характеристики камер видимого диапазона
| Производитель и модель | Формат | Разрешение (МП) | Размер, мм2 | Размер пикселя, мкм |
|---|---|---|---|---|
| Hasselblad | MF | CCD | 53.7 | 6.0 |
| Sony | SF | CMOS | 23.5 | 3.9 |
| NEX-7 | MILC | 24.3 | 15.6 | – |
| Ricoh | SF | CMOS | 23.6 | 4.8 |
| GXR A16 | IUC | 16.2 | 15.7 | – |
Для большинства представленных в таблице камер характерна высокая скорость кадрирования снимков (до 250 мкс) (Colomina et al., 2014). Это позволяет делать более точный анализ изображений даже при вращении камеры. В то же время порядок размера пикселя в несколько микрон (табл. 1) обеспечивает погрешность измерений не более 0.05 м для проекционных снимков с БПЛА на высоте до 500 м с фокусным расстоянием 100 мм. Тем не менее основными проблемами фотограмметрии остается отклонение от плоскости изображения ввиду рельефа местности и различия в масштабе перекрывающихся изображений вращательного и поступательного движения БПЛА (Кваснов, 2017). По этой причине мы будем рассматривать только гладкую ровную подстилающую поверхность (поля, луга, невысокие лесные массивы), где градиент рельефа местности не значителен.
Математическая постановка задачи
В основе создания фотограмметрии, как инструмента восстановления 3D-объектов и измерения их параметров, лежит так называемая проективная геометрия. Как известно, при проектировании точек одной плоскости на другую не каждая точка плоскости имеет образ на другой плоскости. Это обстоятельство привело к необходимости по внедрению в метрику евклидовой плоскости, так называемых бесконечно удаленных (несобственных) точек. Такая постановка задачи приводит к понятию проективной геометрии, в которой все рассматриваемые координаты должны быть однородными.
Будем рассматривать однородные координаты, которые фиксируют исследуемую подстилающую поверхность для пространства реальной земной поверхности (U) и пространства точек на фотоснимке (W). Оба пространства не меняют своего размера при умножении на одно и то же ненулевое число. Таким образом, для любых двух упорядоченных наборов из $\left( {n + 2} \right)$ координат имеем
(1)
$\left\{ {{{p}_{0}},{{p}_{1}}, \ldots ,{{p}_{{n + 1}}}} \right\} \in {\rm P}\left( U \right),\quad \left\{ {{{q}_{0}},{{q}_{1}}, \ldots ,{{q}_{{n + 1}}}} \right\} \in {\rm P}\left( W \right),$Под линейным изоморфизмом мы понимаем преобразование объекта (точек реальной земной поверхности) в заданном гиперпространстве, для которого положение центральной проекции (точек фотоснимка) остается неизменным. Другими словами, линейный изоморфизм определен коэффициентом пропорциональности, иначе фокусным расстоянием для размерности 3.
Естественно, что изменение фокусного расстояния приводит к трансформации системы координат проективной геометрии, поэтому наиболее эффективным способом остается анализ фотограмметрических изображений в декартовой системе координат с фиксированным значением фокусного расстояния.
В исследовании мы сделаем следующие допущения:
− будем рассматривать одиночный фотоснимок с центральной проекцией, полученный БПЛА на заданной высоте с заданным углом места;
− влияние рефракции в видимом диапазоне частот не существенно, в том числе по причине относительно небольших высот полета БПЛА;
− применяемая камера использует видимый диапазон света, который формирует изображение в градации серого цвета 8 бит.
Предложенная математическая постановка задачи требует определенного алгоритма по ее реализации. Будем проводить анализ на основе последовательных шагов, описанных в блок-схеме на рис. 2.

В общем случае точность оценки координат вдоль подстилающей поверхности определяется корректным описанием изоморфизма F в терминах аналитической модели (общее решение задачи), а в частном случае зависит от ряда условий, которые могут быть опущены ввиду их малого влияния на точность измерений, либо отнесены к особенностям работы и функционирования БПЛА (частное решение задачи).
Аналитическое решение задачи
Рассмотрим центральную проекцию изображения P в декартовой системе координат для некоторой произвольной точки снимка a и точки местности А (рис. 3). Пусть дана система координат Oxyz, относительно которой производится фотосъемка. Система координат ОXsYsZs привязана к полученному фотоизображению P.

Точка A соответствует на снимке точке a. Поскольку системы координат коллинеарные, то отображение этих точек происходит с точностью до некоторого постоянного коэффициента – фокусного расстояния: $f:\;A \to \;a$. В общем случае решение задачи об определении координаты точки местности строится на основе уравнений (Лобанов, 1984):
(2)
$\left\{ \begin{gathered} X - {{X}_{S}} = (Z - {{Z}_{S}})\frac{{{{a}_{1}}{\kern 1pt} \left( {x - {{x}_{0}}} \right) + {{a}_{2}}{\kern 1pt} \left( {y - {{y}_{0}}} \right) - {{a}_{3}}f}}{{{{c}_{1}}{\kern 1pt} \left( {x - {{x}_{0}}} \right) + {{c}_{2}}{\kern 1pt} \left( {y - {{y}_{0}}} \right) - {{c}_{3}}f}} \hfill \\ Y - {{Y}_{S}} = (Z - {{Z}_{S}})\frac{{{{b}_{1}}{\kern 1pt} \left( {x - {{x}_{0}}} \right) + {{b}_{2}}{\kern 1pt} \left( {y - {{y}_{0}}} \right) - {{b}_{3}}f}}{{{{c}_{1}}{\kern 1pt} \left( {x - {{x}_{0}}} \right) + {{c}_{2}}{\kern 1pt} \left( {y - {{y}_{0}}} \right) - {{c}_{3}}f}} \hfill \\ \end{gathered} \right.,$x и y – координаты точки a на снимке; f – фокусное расстояние снимка;
${{a}_{i}},{{b}_{i}},{{c}_{i}}$ – направляющие косинусы, зависящие от углов внешнего ориентирования.
Известно, что при помощи углов Эйлера (или направляющие косинусы) можно описать последовательную комбинацию по вращению объекта (фотокамеры) вокруг собственного центра (Кваснов, 2015). Матрица поворота будет выражаться через коэффициенты ${{a}_{i}},{{b}_{i}},{{c}_{i}}$, которые используют для уравнения проективной плоскости. Тогда необходимые нам направляющие косинусы будут выражены следующим образом:
(3)
$\begin{gathered} M = \left( {\begin{array}{*{20}{c}} {{{a}_{1}}}&{{{b}_{1}}}&{{{c}_{1}}} \\ {{{a}_{2}}}&{{{b}_{2}}}&{{{c}_{2}}} \\ {{{a}_{3}}}&{{{b}_{3}}}&{{{c}_{3}}} \end{array}} \right): \\ \left\{ \begin{gathered} {{a}_{1}} = \cos \left( \alpha \right)\cos \left( \chi \right) + \sin \left( \alpha \right)\sin \left( \omega \right)\sin \left( \chi \right) \hfill \\ {{a}_{2}} = - \cos \left( \alpha \right)\sin \left( \chi \right) - \sin \left( \alpha \right)\sin \left( \omega \right)\cos \left( \chi \right) \hfill \\ {{a}_{3}} = - \sin \left( \alpha \right)\cos \left( \omega \right) \hfill \\ {{b}_{1}} = \cos \left( \omega \right)\sin \left( \chi \right) \hfill \\ {{b}_{2}} = \cos \left( \omega \right)\cos \left( \chi \right) \hfill \\ {{b}_{3}} = - \sin \left( \omega \right) \hfill \\ {{c}_{1}} = \sin \left( \alpha \right)\cos \left( \chi \right) + \cos \left( \alpha \right)\sin \left( \omega \right)\sin \left( \chi \right) \hfill \\ {{c}_{2}} = - \sin \left( \alpha \right)sin\left( \chi \right) + \cos \left( \alpha \right)\sin \left( \omega \right)\cos \left( \chi \right) \hfill \\ {{c}_{3}} = \cos \left( \alpha \right)\cos \left( \omega \right) \hfill \\ \end{gathered} \right., \\ \end{gathered} $ω – угол нутации или угол поворота снимка вокруг горизонтальной оси;
χ – угол собственного вращения или поворот вокруг перпендикуляра к снимку.
Рассмотрим случай, когда камера БПЛА имеет определенный наклон, т.е. не нулевой угол нутации $\omega = \alpha \ne 0$. Согласно рис. 2 мы будем полагать, что вращение происходит вдоль оси SXs. При этом ось Ox на снимке будет являться главной горизонталью, а ось Oy – главной вертикалью. В этом случае коэффициенты углов поворота будут выражаться ${{a}_{1}} = 1$, ${{a}_{2}} = 0$, ${{a}_{3}} = 0$, ${{b}_{1}} = 0$, ${{b}_{2}} = \cos \left( \alpha \right)$, ${{b}_{3}} = - \sin \left( \alpha \right)$, ${{c}_{1}} = 0$, ${{c}_{2}} = \sin \left( \alpha \right)$, ${{c}_{3}} = \cos \left( \alpha \right)$, а линейные координаты будут ${{x}_{0}} = {{y}_{0}} = 0$, ${{X}_{S}} = {{Y}_{S}} = {{Z}_{S}} = 0$. Тогда уравнения (3) преобразуются к следующему виду:
(4)
$\begin{gathered} X = H\frac{x}{{f\cos \left( \alpha \right) - y\sin \left( \alpha \right)}}; \\ \,Y = H\frac{{f\sin \left( \alpha \right) + y\cos \left( \alpha \right)}}{{f\cos \left( \alpha \right) - y\sin \left( \alpha \right)}}. \\ \end{gathered} $Начало отсчета в системе координат снимка совпадает с центром фотоизображения, а координаты точек местности X и Y отсчитываются относительно точки надира, полученного в результате опущенного перпендикуляра из точки S на поверхность Земли. Из уравнений (4) можно установить, что вдоль основной вертикали Оy координата местности является функцией вертикальной координаты фотоизображения, фокусного расстояния и высоты $Y = F\left( {y,f,H} \right)$, а для поперечной $X = F\left( {x,y,f,H} \right)$. Таким образом, на всех поперечных горизонталях снимка относительно главной горизонтали ox (рис. 2) координата местности Y будет постоянной. В поперечном направлении смещение координат местности обусловлено влиянием как продольной, так и поперечной координаты. Следовательно, анализ продольного направления измерений можно осуществлять только вдоль главной вертикали. В дальнейшем поперечное направление мы исключим из рассмотрения, так как предел сходимости $\mathop {\lim }\limits_{y \to {{y}_{{гр}}}} Y \gg \mathop {\lim }\limits_{y \to {{y}_{{гр}}}} X$.
Влияние кривизны Земли
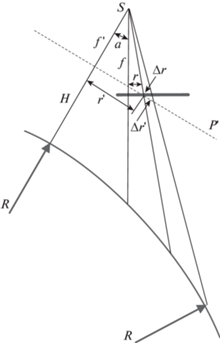
Рассмотрим случай, когда одиночный снимок получен в горизонтальной проекции. При этом его система координат привязана к точке расположения фотокамеры в точке S на высоте H относительно поверхности Земли (рис. 4).

На рис. 4 плоскость P является касательной к точке, где расположен БПЛА, и параллельна некоторой воображаемой плоскости E, являющейся касательной к точке надира N. Влияние крутизны Земли будет проявляться на смещении координаты точки r снимка на некоторую величину $\Delta r$, как если бы падающий луч достигал воображаемой плоскости E на расстоянии s, отстоящий от реальной поверхности Земли на величину смещения $\Delta s$ и высоты $\Delta h$.
Будем считать, что рефракция не вносит сколь-либо существенного влияния на смещение точки. Тогда смещение точки фотоснимка, вызванное кривизной Земли, рассчитывается согласно выражению (Лобанов, 1984):
В работе (Лобанов, 1984) указывается, что данное смещение частично компенсируется рефракцией света. Тем не менее мы рассмотрим случай, когда рефракция минимальна и изображение получено под заданным углом α. В этом случае выражение (5) можно преобразовать согласно подходу, предложенному в работе (Zhao et al., 2014). Каждая отметка на изображении может быть преобразована, согласно матрице поворота в плоскости главной вертикали:
где $M = \left( {\begin{array}{*{20}{c}} {{\text{cos}}\left( \alpha \right)}&{\sin \left( \alpha \right)} \\ { - \sin \left( \alpha \right)}&{{\text{cos}}\left( \alpha \right)} \end{array}} \right)$ – матрица поворота.
В результате мы получаем проекцию точек фотоснимка $\left( {r{\kern 1pt} '} \right)$и фокусного расстояния $\left( {f{\kern 1pt} '} \right)$ в так называемой проекционной плоскости $P{\kern 1pt} '$. Вследствие вращения приведенное фокусное расстояние сокращается, а расстояние от проекционной точки до центра изображения (приведенная точка фотоснимка) увеличивается (рис. 5).
Найдем максимально возможный размер проекционного изображения с фокусным расстоянием $f{\kern 1pt} '$, при котором на заданной высоте H будет просматриваться линия горизонта. Для этого учтем, что максимальный угол наклона камеры к линии горизонта ${{\alpha }_{{\max }}} = \arcsin \left( {\frac{R}{{R + H}}} \right)$, тогда:
(7)
$r_{{\max }}^{'} = f{\kern 1pt} '\; \times {\text{tg}}\left( {{{\alpha }_{{\max }}}} \right) = f{\kern 1pt} '\; \times {\text{tg}}\left( {\arcsin \left( {\frac{R}{{R + H}}} \right)} \right)$При определенном наклоне камеры $\left( \theta \right)$ на изображении будет появляться линия горизонта. Это условие можно зафиксировать согласно выражению:
где α – угол нутации (угол наклона камеры);r – вертикальная координата точки снимка относительно центра изображения;
f – фокусное расстояние.
Последний этап – обратная трансформация, которая позволяет оценить сдвиг на наклонном снимке. Преобразование смещения проекционного смещения $\Delta r'$ к смещению наклонного снимка $\Delta r$ выполняется согласно:
(10)
$\Delta r = \frac{{\Delta r{\kern 1pt} '\gamma }}{{\sin \left( \alpha \right) + \gamma \cos \left( \alpha \right)}},$Был проделан анализ относительной погрешности вертикальной координаты снимка $\left( {{\raise0.7ex\hbox{${\Delta r}$} \!\mathord{\left/ {\vphantom {{\Delta r} r}}\right.\kern-0em} \!\lower0.7ex\hbox{$r$}}} \right)$ от высоты наблюдения (H) и угла наклона камеры (α). Фокусное расстояние 0.1 м фиксировалось относительно геометрического центра фотоснимка. Исследования показали, что влияние крутизны Земли на точность фотограмметрической оценки подстилающей поверхности носит нелинейный характер на небольших высотах до 10 000 м (рис. 6).
Рис. 6.
Влияние угла наклона камеры на относительную погрешность вертикальной координаты для разной высоты точки наблюдения.
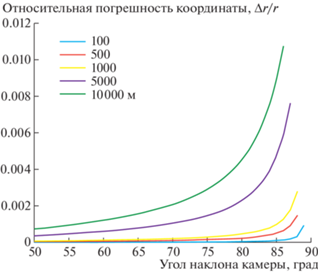
Для определенных углов наклона камеры кривая зависимости сходится к фиксированному значению. Это значение определяется неравенством (9) и прогнозирует появление линии горизонта на снимке относительно его главной оси. В ходе исследований было также установлено, что крайние точки снимка имеют более высокую тенденцию к смещению, чем центральные. Это объясняется изменением крутизны функции арктангенса при увеличении его аргумента, согласно выражению (9).
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ. РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЯ
Было проведено моделирование погрешности измерений координат для участков местности, параллельных линии горизонта и сходящихся к ней. Полагалось, что камера фиксировала подстилающую поверхность под углом 66° относительно перпендикуляра, опущенного в точку надира. Характеристики изображения:
– фокусное расстояние – 0.15 м;
– количество пикселей вдоль горизонтали – 1024;
– количество пикселей вдоль вертикали – 512;
– разрешение фотоизображения – 96 Пикселей/дюйм.
Полученные результаты
Точность измеренных координат проводилась на основе выражений (4). Расстояние до рассматриваемой точки снимка было получено при различных фокусных расстояниях и углах наклона камеры. Высота БПЛА фиксировалась на 500 м. Угол наклона был выбран для двух случаев: линия главной горизонтали совпадает с линией горизонта $\alpha = 72^\circ $ (рис. 8 и 10), верхний край снимка совпадает с линией горизонта $\alpha = 88^\circ $ (рис. 7 и 9). Фокусные расстояния были выбраны $f = 0.05$ м (рис. 6 и 7) и $f = 0.2$ м (рис. 9 и 10).
Рис. 7.
Измерение расстояний вдоль подстилающей поверхности до линии горизонта (фокусное расстояние $f = 0.05$ м; высота полета $h = 500$ м; угол наклона камеры $\alpha = 88^\circ $).
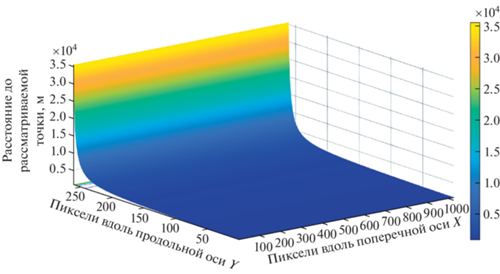
Рис. 8.
Измерение расстояний вдоль подстилающей поверхности до линии горизонта (фокусное расстояние $f = 0.05$ м; высота полета $h = 500$ м; угол наклона камеры $\alpha = 72^\circ $).

Рис. 9.
Измерение расстояний вдоль подстилающей поверхности до линии горизонта
(фокусное расстояние $f = 0.2$ м; высота полета $h = 500$ м; угол наклона камеры $\alpha = 88^\circ $).

Рис. 10.
Измерение расстояний вдоль подстилающей поверхности до линии горизонта
(фокусное расстояние $f = 0.2$ м; высота полета $h = 500$ м; угол наклона камеры $\alpha = 72^\circ $).
Из графиков можно установить, что смещения горизонтальных координат снимка несущественно деформируются по сравнению с главной вертикалью, где присутствует “схождение” лучей к некоторой точке центральной проекции.
Основной момент в том, что изменение угла наклона камеры существенно сокращает точность измерений координат вблизи линии горизонта. Предельное оценочное значение ${{r}_{{\max }}} = 39{\kern 1pt} 223$ м получено для случая, когда главная горизонталь камеры совпадает с линией горизонта. При совпадении линий горизонта с верхней границей снимка эта величина достигает ${{r}_{{\max }}} = 22{\kern 1pt} {\kern 1pt} 456$ м. В обоих вариантах полученные значения оказались существенно ниже потенциального значения, рассчитанного согласно $r = 3.57\sqrt H \approx 79.8$ м.
Вторым важным моментом является более равномерное изменение координат вдоль главного вертикала при увеличении фокусного расстояния. При этом добиться более точного результата предельного значения удаленности координат не представляется возможным, ввиду потенциально низкого разрешения камеры.
ОБСУЖДЕНИЯ
В ряде зарубежных работ существуют исследования, связанные с оценкой точности фотограмметрических измерений (Lu et al., 2012). Так, измерение дистанции до объектов на основе фотоизображений представлено в работе (Hsu et al., 2011), где экспериментальные исследования проведены для небольших расстояний (до 2 м) с использованием CCD-камеры. Результаты работы показали, что ошибка измерений дальности начинает резко возрастать на определенной дистанции для заданного угла наклона 30 град. Причем экспериментальная точность намного ниже теоретической точности в 3–5 раз. Это подтверждает наши результаты (рис. 7–10), но требует проведения экспериментальных подтверждений.
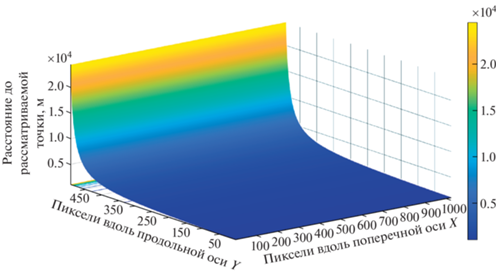
На основании полученных математических соотношений (4) и (9) был реализован программный код для построения фотограмметрической линии координат для произвольных фотоизображений (рис. 11 и 12). В качестве инструмента использовался пакет программ Matlab 2020, на платформе которого были смоделированы сценарии для случая, когда камера имеет малый угол наклона $\alpha = 33^\circ $ (рис. 11) и когда большой угол наклона $\alpha = 83^\circ $ (рис. 12), вследствие чего линия горизонта совпадает с главной горизонталью фотоснимка.
Рис. 11.
Точность фотограмметрических измерений подстилающей поверхности на примере земной поверхности (фокусное расстояние $f = 0.05$ м; высота полета $h = 350$ м; угол наклона камеры $\alpha = 33^\circ $).
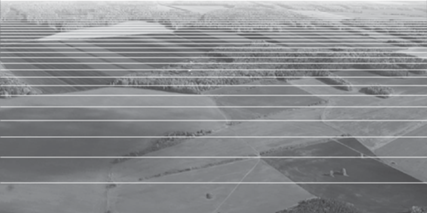
Рис. 12.
Точность фотограмметрических измерений подстилающей поверхности на примере земной поверхности (фокусное расстояние $f = 0.05$ м; высота полета $h = 550$ м; угол наклона камеры $\alpha = 83^\circ $).

Количество измерительных линий вдоль главной вертикали для обоих рисунков одинаково и равно 21. При этом их частота – нелинейная, вследствие особенностей проекционной геометрии, и возрастает более существенно для случая, когда присутствует линия горизонта. Фактически мы можем измерять только 90% от расстояния до линии горизонта на снимке, т.е. реальную подстилающую поверхность в диапазоне 5–10 км из возможных 83 км. Эти результаты совпадают с теоретическими результатами, продемонстрированными на рис. 6–9. Очевидно, дальнейшее развитие методики фотограмметрических измерений связано с совершенствованием качества получаемых изображений (разрешение снимка, качество оптики – фокусное расстояние, яркость светопередачи). Для развития наземной фотограмметрии должны быть учтены неровности подстилающей поверхности (особенно горная местность) и влияние рефракции для камеры видимого диапазона.
ЗАКЛЮЧЕНИЕ
В статье исследуется вопрос о потенциальной точности при измерении координат надводной поверхности при помощи фотограмметрических методов дистанционного зондирования на основе изображения, полученного для заданного угла наклона. Теоретическая проблема фотограмметрии относится к так называемой проективной геометрии, где исследуемые объекты рассматриваются в однородных координатах, коэффициентом для которых выбирается фокусное расстояние камеры.
Наиболее сложным случаем представляется анализ измерений в зоне, расположенной в непосредственной близости от линии горизонта. В исследовании показано, что влияние крутизны Земли не превышает величины 1% для высоты измерений не более 10 км. В то же время точность измерений вдоль главной вертикали существенно падает при приближении к линии горизонта. Таким образом, фактическое измерение координат ограничено диапазоном 5–10% от возможной дальности. Результаты, полученные аналитическим путем, подтвердили свою достоверность на основе имитационного моделирования.
Список литературы
Гаврилова Л.А., Лимонов А.Н. Прикладная фотограмметрия: учебник для вузов. М.: Академический проект, 2016. 255 с.
Кваснов А. В. Оценка построения трассы радиолокационной цели неподвижным лучом АФАР в дальней зоне наблюдения. Радиотехника. 2017. № 2. С. 4–12.
Кваснов А. В. Определение дальности до источника радиоизлучения по энергопотенциалу принимаемого сигнала. Датчики и системы. 2020. Т. 243. № 1. С. 29–34.
Кваснов А.В. Исследование информационной полноты радиолокационных данных в задачах классификации точечных воздушных объектов. Журнал радиоэлектроники [электронный журнал]. 2021. № 11.
Кваснов А.В. Синтез оптимального регулятора для управления движением бортовой радиолокационной системы при отслеживании сверхзвуковых целей. Информационно-измерительные и управляющие системы. 2015. Т. 13. № 2. С. 55–62.
Лобанов А.Н. Фотограмметрия: учебник для вузов (изд. 2-е изд. перераб. и доп.). М.: Недра, 1984. 552 с.
Обиралов А.И., Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. М.: Колосс, 2006. 334 с.
Хабарова И.А., Хабарова Д.А., Яворская И.Д., Иванов И.Н. Обзор современных достижений в фотограмметрии и аэрофотосъемке. Международный журнал прикладных наук и технологий “Integral”. 2019. Т. 4. № 2. С. 15–33.
Хлебникова Т.А., Опритова О.А., Аубакирова С.М. Экспериментальные исследования точности построения фотограмметрической модели по материалам БПЛА. Интерэкспо Гео-Сибирь. 2018. Т. 1. № 4. С. 32–37.
Colomina I., Molina P. Unmanned aerial systems for photogrammetry and remote sensing: a review. ISPRS Journal of Photogrammetry and Remote Sensing 2014. № 92. P. 79–97.
Hsu C.C.J., Lu M.C., Lu Y.Y. Distance and Angle Measurement of Objects on an Oblique Plane Based on Pixel Number Variation of CCD Images. IEEE Transaction on Instrumantation and Measurement, 2011. V. 60. № 5. P. 1779–1794.
Kvasnov A.V., Shkodyrev V.P. A classification technique of group objects by artificial neural networks using estimation of entropy on synthetic aperture radar images. Journal of Sensors and Sensor Systems. 2021. V.10. № 1. P. 127–134.
Liu J., Xu W., Guo B., Zhou G., Zhu H. Accurate Mapping Method for UAV Photogrammetry Without Ground Control Points in the Map Projection Frame. IEEE Transaction on Geoscience and Remote Sensing. 2021. V. 59. № 11. P. 9673–9681.
Lu M.C., Hsu C.C., Lu Y.Y. Image-Based System for Measuring Objects on an Oblique Plane and Its Applications in 2-D Localization. IEEE Sensors journal. 2012. № 12. P. 2249–2261.
Rau J., Jhan J., Hsu Y. Analysis of Oblique Aerial Images for Land Cover and Point Cloud Classification in an Urban Environment. IEEE Transactions on Geoscience and Remote Sensing. 2015. N 53 (3). P. 1304–1319.
Shen X., Zhang Y., Li Q. Accurate direct georeferencing of aerial imagery in national coordinates. ISPRS Journal of Photogrammetry and Remote Sensing. 2015. № 105. P. 13–18.
Telling J., Lyda A., Hartzell P., Glennie C. Review of Earth science research using terrestrial laser scanning. Earth-Science Reviews. 2017. № 169. P. 35–68.
Zhao H., Zhang B., Wub C., Zuo Z., Chen Z., Bi J. Direct georeferencing of oblique and vertical imagery in different coordinate systems. ISPRS Journal of Photogrammetry and Remote Sensing/ 2014. № 95. P. 122–133.
Zhou G., Bao X., Ye S., Wang H., Yan H. Selection of Optimal Building Facade Texture Images From UAV-Based Multiple Oblique Image Flows. IEEE Transactions on Geoscience and Remote Sensing/ 2021. V. 59. № 2. P. 1534–1552.
Дополнительные материалы отсутствуют.
Инструменты
Сенсорные системы