

Известия РАН. Теория и системы управления, 2022, № 2, стр. 162-176
Разработка робастной системы управления манипуляционным роботом с использованием аппарата грамианов
А. А. Анисимов a, *, К. Е. Соколов a, С. В. Тарарыкин a
a ФГБОУ ВО “Ивановский государственный энергетический ун-т им. В.И. Ленина”
Иваново, Россия
* E-mail: anis-2012@yandex.ru
Поступила в редакцию 15.05.2021
После доработки 20.05.2021
Принята к публикации 27.07.2021
- EDN: BISXQU
- DOI: 10.31857/S0002338821060032
Аннотация
Разрабатывается метод синтеза робастной системы управления манипуляционным роботом, основанный на линеаризации модели объекта управления, преобразовании структуры полученной модели с помощью предрегулятора в направлении повышения управляемости с использованием математического аппарата грамианов, последующего модального расчета централизованного регулятора состояния и применения синтезированных устройств для управления исходным нелинейным объектом. Грамиан управляемости представляет собой матрицу Грама, вычисленную для состояний линейной динамической системы при реакции на дельта-импульс. Предлагаемый метод позволяет улучшить робастные свойства и повысить быстродействие системы управления роботом при сохранении апериодического характера процессов в условиях взаимного влияния звеньев и вариации их параметров.
Введение. В настоящее время манипуляционные роботы (МР), воспроизводящие рабочие функции рук человека, широко применяются в промышленности, преимущественно на машиностроительных предприятиях, где выполняют операции сварки, окраски, смены заготовок и др. [1–4]. К их системам автоматического управления (САУ) обычно предъявляются жесткие требования, которые предполагают обеспечение апериодического характера переходных процессов по положению при высоких показателях быстродействия.
Достижение заданного качества управления МР осложняется нелинейным характером подобных объектов, взаимным влиянием каналов управления звеньями, а также изменением параметров в широких пределах. Несмотря на большое количество методов синтеза, основанных на принципах модального, оптимального и адаптивного управления, повышение качества САУ МР до сих пор представляет собой актуальную задачу [1, 3, 4].
В настоящее время большинство САУ МР строится по принципу декомпозиции объекта на отдельные звенья и синтеза локальных регуляторов их перемещений [1, 2, 4]. Однако при таком подходе не учитывается взаимное влияние звеньев, что приводит к ухудшению качества управления МР при одновременном движении по нескольким координатам.
Другим распространенным методом синтеза САУ роботами является введение каналов компенсации влияния перекрестных связей по силам и моментам [1, 3]. Недостаток такого подхода – высокая чувствительность компенсационных систем к воздействию неучтенных факторов и вариациям параметров мехатронного объекта управления, например к изменению массы переносимого груза.
Применение принципов адаптивного управления потенциально позволяет повысить эффективность как локальных, так и централизованных систем управления МР [3, 4]. Вместе с тем разработка и реализация адаптивных САУ роботами представляет собой весьма сложную задачу, поскольку необходимо обеспечивать высокий темп их самонастройки при изменении параметров объекта в процессе интенсивного движения.
Более простым подходом может быть синтез САУ с централизованным регулятором методами модального или оптимального управления по линейной модели, учитывающей взаимное влияние звеньев манипулятора [1, 3]. Однако синтез централизованной системы осложняется проблемой робастности, поскольку параметры МР в процессе движения меняются, а его линеаризованная в рабочей точке модель является приближенной [5–7].
Поскольку МР обычно имеет несколько каналов управления, эффективным решением в данном случае представляется применение грамианных методов синтеза робастных САУ с предрегулятором и централизованным регулятором состояния [8]. Такой подход основан на целенаправленном изменении распределения сингулярных чисел грамианов линеаризованных структур путем введения в систему дополнительных каналов регулирования, корректирующих свойства объекта в направлении повышения управляемости и создающих основу для дальнейшего улучшения ее робастных свойств.
В данной работе предлагается метод синтеза робастной системы управления МР повышенного быстродействия, базирующийся на линеаризации математической модели объекта управления, преобразовании структуры полученной модели с помощью предрегулятора в направлении повышения управляемости с использованием математического аппарата грамианов, последующего модального расчета централизованного регулятора состояния и применения синтезированных устройств для управления исходным нелинейным объектом. Предлагаемый метод позволяет улучшить робастные свойства и повысить быстродействие системы управления МР при сохранении апериодического характера процессов в условиях взаимного влияния звеньев и вариации их параметров.
Исследование сопровождается конкретными числовыми примерами синтеза различных систем управления, обеспечивающими наглядную иллюстрацию эффективности полученных результатов. Расчетная часть работы выполняется средствами программного комплекса MatLab.
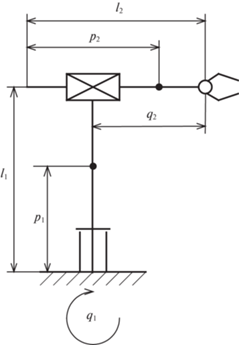
1. Постановка задачи исследования. Рассмотрим задачу управления динамикой промышленного робота на примере типового двухзвенного манипулятора, первое звено которого совершает вращательное, а второе – поступательное движение. Его кинематическая схема приведена на рис. 1, где l1 и l2 – длины 1-го и 2-го звеньев; p1 и p2 – координаты центров масс; q1 – угловое положение 1-го звена; q2 – линейное положение 2-го звена.
Динамические свойства МР как объекта управления описываются системой нелинейных дифференциальных уравнений, отражающих движение каждого звена механизма [1–3]. Для получения такой математической модели наиболее часто используют уравнения Лагранжа 2-го рода:
(1.1)
$\frac{d}{{dt}}\left( {\frac{{\partial L}}{{\partial {{{\dot {q}}}_{i}}}}} \right) - \frac{{\partial L}}{{\partial {{q}_{i}}}} = {{Q}_{i}},\quad i = \overline {1,n} ,$Анализируя динамику двухзвенного манипулятора в глобальной системе координат, можно показать, что математические выражения его кинетической и потенциальной энергии имеют следующий вид:
Здесь J1 и J2 – моменты инерции 1-го и 2-го звеньев относительно осей вращения; m1 и m2 – массы звеньев манипулятора; g – ускорение свободного падения.
Подставляя полученные выражения для кинетической и потенциальной энергии в уравнения Лагранжа (1.1) и пренебрегая наличием механических сопротивлений, получаем описание динамики двухзвенного манипулятора в виде нелинейных дифференциальных уравнений:
где ${{\ddot {q}}_{1}}$ и ${{\ddot {q}}_{2}}$ – ускорения 1-го и 2-го звеньев манипулятора; M1 – вращательный момент привода 1-го звена; F2 – силовое воздействие привода 2-го звена.
Структурная схема полученной нелинейной модели МР, соответствующая уравнениям (1.2), приведена на рис. 2, где u1 и u2 – задающие воздействия, e1 и e2 – сигналы ошибки локальных контуров управления; kl11, kl12 и kl21, kl22 – параметры локальных регуляторов. Динамика быстродействующих электроприводов 1-го и 2-го звеньев приближенно описывается передаточными функциями первого порядка с коэффициентами передачи Kp1 и Kp2, постоянными времени T1 и T2.

Наиболее часто САУ промышленными МР строятся на базе автономных сепаратных подсистем управления звеньями, при разработке которых не учитывается влияние перекрестных связей между каналами. При таком подходе звенья манипулятора считаются независимыми объектами управления, что позволяет синтезировать линейные регуляторы низкого порядка.
Линейные модели 1-го и 2-го звеньев манипулятора в координатах состояния ${{{\mathbf{x}}}_{1}} = {{[{{\dot {q}}_{1}}{\text{ }}{{q}_{1}}]}^{{\text{T}}}}$ и ${{{\mathbf{x}}}_{2}} = {{[{{\dot {q}}_{2}}{\text{ }}{{q}_{2}}]}^{{\text{T}}}}$ в этом случае принимают следующий вид:
(1.3)
$\begin{gathered} {{{{\mathbf{\dot {x}}}}}_{1}} = {{{\mathbf{A}}}_{1}}{{{\mathbf{x}}}_{1}} + {{{\mathbf{B}}}_{1}}{{M}_{1}},\quad {{{{\mathbf{\dot {x}}}}}_{2}} = {{{\mathbf{A}}}_{2}}{{{\mathbf{x}}}_{2}} + {{{\mathbf{B}}}_{2}}{{F}_{2}}, \\ {{{\mathbf{A}}}_{1}} = \left[ {\begin{array}{*{20}{c}} 0&0 \\ 1&0 \end{array}} \right],\quad {{{\mathbf{B}}}_{1}} = \left[ {\begin{array}{*{20}{c}} {\frac{1}{{{{J}_{s}}}}} \\ 0 \end{array}} \right],\quad {{{\mathbf{A}}}_{2}} = \left[ {\begin{array}{*{20}{c}} 0&0 \\ 1&0 \end{array}} \right],\quad {{{\mathbf{B}}}_{1}} = \left[ {\begin{array}{*{20}{c}} {\frac{1}{{{{m}_{2}}}}} \\ 0 \end{array}} \right], \\ \end{gathered} $Пренебрегая инерционностью исполнительных механизмов в целях повышения параметрической грубости САУ, можно выразить управляющие воздействия локальных регуляторов состояния (РС) звеньев манипулятора:
Параметрический синтез регуляторов состояния K1 и K2 может осуществляться методом модального управления на основе характеристического полинома Ньютона D(s) = (s + Ω0)2, где Ω0 – среднегеометрический корень (СГК), что обеспечивает апериодический характер и заданный темп переходных процессов в локальных подсистемах при поочередном пуске звеньев МР.
Вместе с тем при одновременном пуске звеньев манипулятора в целях повышения его производительности качество переходных процессов существенно ухудшается, что объясняется влиянием неучтенных при синтезе перекрестных связей между каналами управления. При изменении массы m2 и момента инерции Js манипулятора качество переходных процессов снижается в еще большей степени.
Для восстановления апериодического характера переходных процессов вынужденно снижают быстродействие контуров управления координатами МР, что приводит к соответствующему уменьшению производительности конкретного производственного механизма или целой технологической цепочки.
Введение каналов динамической компенсации влияния перекрестных связей по силам и моментам обеспечивает автономизацию каналов управления 1-м и 2-м звеньями, и, как следствие, повышение качества переходных процессов при номинальных параметрах МР. Значения компенсирующих силовых воздействий ${{M}_{1}} = {{K}_{{p1}}}{{\bar {M}}_{1}}$ и ${{F}_{2}} = {{K}_{{p2}}}{{\bar {F}}_{2}}$ в этом случае определяются на основе уравнений динамики манипулятора (1.2):
(1.4)
$\left\{ \begin{gathered} {{{\bar {M}}}_{1}} = {{e}_{1}}\left( {1 + \frac{{{{{\bar {m}}}_{2}}}}{{{{{\bar {J}}}_{1}} + {{{\bar {J}}}_{2}}}}{{{({{q}_{2}} - {{l}_{2}} + {{p}_{2}})}}^{2}}} \right) + \frac{{2{{{\bar {m}}}_{2}}}}{{{{K}_{{p1}}}}}({{q}_{2}} - {{l}_{2}} + {{p}_{2}}){{{\dot {q}}}_{2}}{{{\dot {q}}}_{1}}{\text{,}} \hfill \\ {{{\bar {F}}}_{2}} = {{e}_{2}} - \frac{{{{{\bar {m}}}_{2}}}}{{{{K}_{{p2}}}}}({{q}_{2}} - {{l}_{2}} + {{p}_{2}})\dot {q}_{1}^{2}{\text{,}} \hfill \\ \end{gathered} \right.$Подставляя выражения компенсирующих воздействий (1.4) в уравнения динамики манипулятора (1.2) при условии равенства оценок параметров их действительным значениям, получаем линейные дифференциальные уравнения, соответствующие векторно-матричной модели (1.3). Переходные процессы координат состояния q1 и q2 в этом случае носят апериодический характер и имеют заданное быстродействие, определяемое принятой при синтезе локальных РС величиной СГК.
Вместе с тем влияние малых постоянных времени приводных устройств T1 и T2, а также отклонений параметров манипулятора от расчетных значений приводят к существенному ухудшению качества переходных процессов в системе управления роботом с каналами компенсации силовых перекрестных связей.
Поставим задачу повышения быстродействия САУ манипуляционным роботом с одновременным ступенчатым воздействием на оба канала управления без использования автономизирующих связей при сохранении апериодического характера переходных процессов относительно точек позиционирования по координатам положения q1 и q2 в условиях вариации параметров механизма m2 и J2 в заданных пределах.
Таким образом, разработанная система управления должна снизить время и обеспечить апериодический характер переходных процессов при перемещении манипулятора из некоторого исходного положения в заданную точку в пределах рабочей зоны МР, а также обратном перемещении, при заранее неизвестной массе переносимого груза.
Поскольку наиболее неблагоприятное взаимное влияние каналов МР, а также вариации m2 и J2 можно рассматривать как внутренние параметрические возмущения, будем решать поставленную задачу путем улучшения робастных свойств синтезируемой САУ. Это достигается за счет повышения степени управляемости двухканального объекта на основе применения математического аппарата грамианов управляемости и их сингулярного разложения. Под робастной здесь понимается система, обеспечивающая устойчивость и апериодический характер переходных процессов в условиях вариации параметров объекта управления в определенных пределах [6, 7].
2. Линеаризация модели манипуляционного робота и синтез централизованного РС. Как показывает анализ (1.2), исходная модель управляемого МР допускает линеаризацию в рабочих режимах, поскольку нелинейные характеристики являются непрерывными и дифференцируемыми. Это в свою очередь позволяет использовать при синтезе систем управления манипулятором линейные методы, основанные на представлении объекта в пространстве состояний.
Полученная линеаризованная модель МР приведена в виде структурной схемы на рис. 3, а ее соответствующее векторно-матричное описание в координатах состояния ${\mathbf{x}} = {{[\begin{array}{*{20}{c}} {{{{\dot {q}}}_{1}}}&{{{q}_{1}}}&{{{{\dot {q}}}_{2}}}&{{{q}_{2}}} \end{array}]}^{{\text{T}}}}$ с выходами ${\mathbf{y}} = {{[\begin{array}{*{20}{c}} {{{q}_{1}}}&{{{q}_{2}}} \end{array}]}^{{\text{T}}}}$ имеет вид
(2.1)
$\begin{gathered} {\mathbf{\dot {x}}} = {\mathbf{Ax}} + {{{\mathbf{B}}}_{1}}{{M}_{1}} + {{{\mathbf{B}}}_{2}}{{F}_{2}}, \\ {\mathbf{y}} = {\mathbf{Cx}}, \\ \end{gathered} $ ,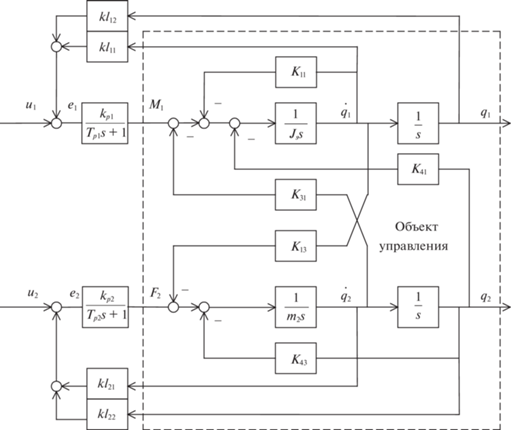
В состав объекта управления и его модели включаются локальные РС с параметрами K1 = [kl11kl12] и K2 = [kl21kl22], синтезируемые методом модального управления и формирующие исходный (медленный) темп переходных процессов, приобретающих апериодический характер в условиях снижения взаимного влияния звеньев МР.
Коэффициенты линеаризации стабилизированной модели манипуляционного робота определяются путем дифференцирования нелинейных характеристик, что приводит к следующим выражениям:
Величины коэффициентов линеаризации зависят от значений координат q2, ${{\dot {q}}_{1}}$ и ${{\dot {q}}_{2}}$, которые, очевидно, меняются при движении манипулятора. В данных условиях значения коэффициентов целесообразно определять путем оптимизационной процедуры идентификации динамических характеристик линейной и нелинейной моделей объекта в режиме отработки ступенчатого задающего воздействия на оба канала управления. В качестве критерия оптимальности полученных значений при этом используется минимум среднеквадратической ошибки идентификации.
Для полученной линейной модели манипуляционного робота, учитывающей влияние перекрестных связей между звеньями, может быть синтезирован централизованный регулятор состояния, воздействующий на вход локального контура управления 1-м звеном (рис. 3):
где ${\mathbf{K}} = [\begin{array}{*{20}{c}} {{{k}_{1}}}&{{{k}_{2}}}&{{{k}_{3}}}&{{{k}_{4}}} \end{array}]$ – вектор параметров РС; q1ref и q2ref – заданные значения координат.Параметры РС в этом случае определяются методом модального управления [5, 7] с использованием в качестве желаемого характеристического полинома Ньютона $D(s) = {{(s + {{\Omega }_{o}})}^{4}}$, обеспечивающего апериодический характер и заданную длительность переходных процессов в линейной системе управления манипуляционным роботом при номинальных параметрах объекта. Однако при изменении параметров манипуляционного робота, например увеличении массы звена m2, переходные процессы в синтезированной системе управления принимают колебательный характер, что не соответствует предъявляемым требованиям. Причиной высокой параметрической чувствительности САУ МР обычно является недостаточная управляемость объекта, обусловленная его конструктивными особенностями и требующая соответствующей коррекции его системных свойств.
3. Повышение управляемости манипуляционного робота грамианным методом. В соответствии с предложенным ранее грамианным методом синтеза робастных систем управления [8] представим линеаризованную модель МР (2.1) в двухканальной форме, приняв вход 1-го звена в качестве управляющего, а вход 2-го звена используем для коррекции системных свойств объекта:
Преобразования структуры векторно-матричной модели объекта в направлении повышения управляемости будем проводить с использованием математического аппарата грамианов управляемости Gc и их сингулярного разложения, определяемых выражениями [9–11]:
(3.2)
${{{\mathbf{G}}}_{c}} = \int\limits_0^\infty {{{e}^{{{\mathbf{A}}t}}}{\mathbf{B}}{\text{ }}{{{\mathbf{B}}}^{{\text{T}}}}{{e}^{{{{{\mathbf{A}}}^{{\text{T}}}}t}}}dt} ,$(3.3)
${{{\mathbf{G}}}_{c}} = {{{\mathbf{U}}}_{c}}{{{\mathbf{\Sigma }}}_{c}}{\mathbf{U}}_{c}^{{\text{T}}},$Помимо проведения системного анализа, математический аппарат грамианов позволяет решать и обратные задачи, в том числе формировать модели объектов управления с заданным соотношением управляемости и наблюдаемости. Подобный подход, основанный на целенаправленном изменении сингулярных чисел грамиана (3.2) с последующим вычислением модифицированных матриц${\mathbf{\hat {A}}}$ и ${\mathbf{\hat {B}}}$, был использован для формирования структуры объекта с повышенной степенью управляемости, обеспечивающей успешное решение задачи синтеза робастной САУ [8, 12].
Основная идея преобразования структуры объекта заключается в том, что для исходной матричной модели МР принудительно увеличивают значения сингулярных чисел грамиана управляемости: ${{{\mathbf{\hat {\Sigma }}}}_{с}} = {{{\mathbf{\Sigma }}}_{с}} + \Delta {{{\mathbf{\Sigma }}}_{c}}$. Затем определяются матрицы ${\mathbf{\hat {A}}}$ и ${\mathbf{\hat {B}}}$ преобразованной модели объекта в пространстве состояния путем аналитического или численного решения интегрального уравнения:
(3.4)
$\int\limits_0^\infty {{{e}^{{{\mathbf{\hat {A}}}t}}}{\mathbf{\hat {B}}}{\text{ }}{{{{\mathbf{\hat {B}}}}}^{{\text{T}}}}{{e}^{{{{{{\mathbf{\hat {A}}}}}^{{\text{T}}}}t}}}dt} = {{{\mathbf{\hat {U}}}}_{c}}{{{\mathbf{\hat {\Sigma }}}}_{c}}{\mathbf{\hat {U}}}_{c}^{{\text{T}}},$Математически строго данное уравнение решается при условии идентичности передаточных функций исходной и преобразованной моделей объекта, которое выражается через грамианы управляемости следующим образом:
(3.5)
${{{\mathbf{\hat {G}}}}_{c}} = {{{\mathbf{T}}}^{{ - 1}}}{{{\mathbf{G}}}_{c}}{{{\mathbf{T}}}^{{ - {\text{T}}}}},$(3.6)
${\mathbf{\hat {A}}} = {{{\mathbf{T}}}^{{ - 1}}}{\mathbf{AT}};\quad {\mathbf{\hat {B}}} = {{{\mathbf{T}}}^{{ - 1}}}{\mathbf{B}};\quad {\mathbf{\hat {C}}} = {\mathbf{CT}}.$Выражение для матрицы преобразования подобия T, полученное на основе уравнения (3.5), а также формул сингулярного разложения (3.3) грамианов управляемости в исходной ${{{\mathbf{G}}}_{c}} = {{{\mathbf{U}}}_{c}}{{{\mathbf{\Sigma }}}_{c}}{\mathbf{U}}_{c}^{{\text{T}}}$ и преобразованной ${{{\mathbf{\hat {G}}}}_{c}} = {{{\mathbf{\hat {U}}}}_{c}}{{{\mathbf{\hat {\Sigma }}}}_{c}}{\mathbf{\hat {U}}}_{c}^{{\text{T}}}$ системах координат имеет вид
(3.7)
${\mathbf{T}} = {{{\mathbf{U}}}_{c}}{\mathbf{\Sigma }}_{с}^{{1/2}}{\mathbf{\hat {\Sigma }}}_{c}^{{ - 1/2}}{\mathbf{\hat {U}}}_{c}^{{ - 1}}.$Причем матрица преобразования Uc в данном случае остается неизменной: ${{{\mathbf{\hat {U}}}}_{c}} = {{{\mathbf{U}}}_{c}}$, что позволяет минимизировать изменение структуры объекта.
Предлагаемые преобразования физически реализуются путем введения в структуру объекта дополнительных прямых и обратных связей, т. е. выполняется синтез дополнительного к основному РС так называемого предрегулятора, параметры которого определяются по формулам
(3.8)
${\mathbf{A}}{\kern 1pt} ' = {\mathbf{A}} - {\mathbf{\hat {A}}};\quad {\mathbf{B}}{\kern 1pt} ' = {\mathbf{B}} - {\mathbf{\hat {B}}}.$Как показывает анализ структуры САУ МР, приведенной на рис. 3, корректирующие связи целесообразно вводить по каналу управления вторым звеном ${{u}_{2}}$, поскольку на вход первого звена ${{u}_{1}}$ поступает сигнал основного регулятора состояния. Это означает, что в данном случае возможно изменение только третьей строки матрицы линеаризованной модели объекта A, что выражается математически введением двоичной маски E =[ 0 0 1 0 ] : ${{u}_{2}} = {\mathbf{E}} \cdot {\mathbf{A}}{\kern 1pt} '{\mathbf{x}}$.
В связи с этим при синтезе робастной системы управления манипулятором предлагается использовать итерационный алгоритм решения уравнения (3.4), позволяющий получить заданное распределение сингулярных чисел грамиана управляемости путем вариации одной строки матрицы A, если снять ограничение на изменение матрицы Uc объекта [8].
При таком подходе используются модифицированные варианты формул (3.6) и (3.7), позволяющие выполнять преобразование подобия итерационным способом, с помощью двоичных масок:
(3.9)
${\mathbf{\hat {A}}}(i + 1) = {{{\mathbf{E}}}_{1}}{\mathbf{A}} + {\mathbf{E}}({\mathbf{T}}_{i}^{{ - 1}}{\mathbf{\hat {A}}}(i){\text{ }}{{{\mathbf{T}}}_{i}}),$(3.10)
${{{\mathbf{T}}}_{i}} = {{{\mathbf{\hat {U}}}}_{c}}(i){\mathbf{\hat {\Sigma }}}_{с}^{{1/2}}(i){\text{ }}{\mathbf{\hat {\Sigma }}}_{c}^{{ - 1/2}}{\mathbf{\hat {U}}}_{c}^{{ - 1}}(i).$Здесь i – номер итерации; E1 = I – E – двоичная диагональная матрица, в которой единицы соответствуют неизменным строкам A; ${{{\mathbf{\hat {U}}}}_{c}}(i)$ и ${{{\mathbf{\hat {\Sigma }}}}_{c}}(i)$ – текущие значения матриц, полученные при сингулярном разложении грамиана ${{{\mathbf{\hat {G}}}}_{c}}(i) = {{{\mathbf{\hat {U}}}}_{c}}(i){{{\mathbf{\hat {\Sigma }}}}_{c}}(i){\mathbf{\hat {U}}}_{{\text{c}}}^{{\text{T}}}(i)$, вычисленного для ${\mathbf{\hat {A}}}(i)$.
В этом случае решение уравнения (3.4) при заданном векторе сингулярных чисел ${{{\mathbf{\hat {\Sigma }}}}_{c}}$ и переменной матрице ${{{\mathbf{\hat {U}}}}_{c}}$ может быть найдено при помощи итерационной процедуры, в каждом цикле которой вычисляется новое значение Ti и выполняется преобразование матрицы ${\mathbf{\hat {A}}}(i)$ по формулам (3.9) и (3.10).
Таким образом, применение итерационной процедуры позволяет получить заданное распределение сингулярных чисел грамиана Gc с целью повышения степени управляемости объекта путем введения дополнительного предрегулятора с матрицей ${\mathbf{A}}{\kern 1pt} '$.
В дальнейшем это позволит обеспечить необходимые робастные свойства САУ МР при синтезе основного регулятора состояния с матрицей K методом модального управления.
4. Методика синтеза робастной системы управления манипуляционным роботом. На основе предложенного грамианного подхода была реализована итерационная процедура синтеза робастной САУ МР повышенного быстродействия. Данная процедура включает в себя этапы линеаризации модели объекта, коррекции ее системных свойств в направлении повышения управляемости и синтеза централизованного регулятора состояния методом модального управления (рис. 4).
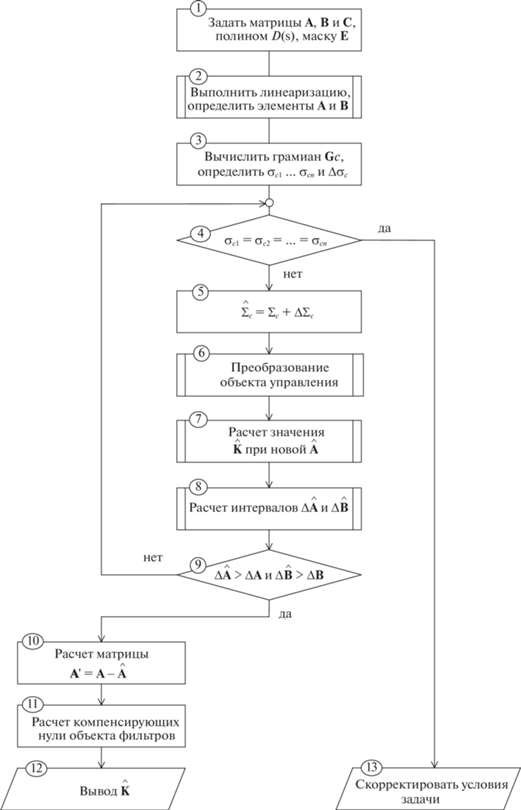
На первом этапе (блок 1) на базе исходной нелинейной модели определяется структура линеаризованной модели МР в векторно-матричной форме, назначается основной и вспомогательный каналы управления, формируется двоичная маска E. На этом этапе осуществляется также синтез локальных РС, формирующих исходный темп переходных процессов в объекте и обеспечивающих необходимые условия для последующего вычисления грамианов.
Затем (блок 2) в типичном (основном) режиме работы проводится параметрическая идентификация линейной и нелинейной моделей объекта управления оптимизационными методами, в результате чего определяются значения элементов матриц A и B, а также интервалы их изменения $\Delta {\mathbf{A}}$ и $\Delta {\mathbf{B}}$.
Далее (блок 3) для полученной линейной модели МР выполняется вычисление грамиана управляемости и его разложение на диагональную матрицу сингулярных чисел ${{{\mathbf{\Sigma }}}_{с}}$ и матрицу Uc.
На втором этапе разработки САУ МР реализуется итерационный алгоритм коррекции системных свойств модели объекта и синтез предрегулятора. В качестве исходных при этом принимаются значения матриц объекта ${\mathbf{\hat {A}}} = {\mathbf{A}}$ и ${{{\mathbf{\hat {\Sigma }}}}_{с}} = {{{\mathbf{\Sigma }}}_{с}}$.
Итерационный процесс начинается с проверки условия достижения верхней границы области вариации сингулярных чисел грамиана управляемости, на которой все сингулярные числа совпадают: ${{\sigma }_{{c1}}} = {{\sigma }_{{c2}}} = ... = {{\sigma }_{{cn}}}$ (блок 4). Если граница достигнута, то осуществляется прекращение процедуры поиска и вывод соответствующего сообщения (блок 13).
В противоположном случае выполняется последовательное увеличение сингулярных чисел грамиана управляемости методом регулярного сканирования в диапазоне от наименьшего числа ${{\sigma }_{{c1}}}$ до наибольшего ${{\sigma }_{{cn}}}$ с заданным шагом $\Delta {{\sigma }_{c}}$(блок 5).
Для каждого нового сочетания сингулярных чисел ${{{\mathbf{\hat {\Sigma }}}}_{с}}$ (блок 6) определяется преобразованное значение матрицы объекта ${\mathbf{\hat {A}}}(i)$ на основе итерационных формул (3.9) и (3.10).
На третьем этапе синтеза для преобразованной модели объекта управления с матрицами ${\mathbf{\hat {A}}}$ и ${\mathbf{B}}$ методом модального управления выполняется расчет матрицы обратных связей ${\mathbf{\hat {K}}}$ регулятора состояния (блок 7).
Затем для синтезированного варианта САУ манипуляционным роботом с регулятором состояния рассчитываются интервалы робастной устойчивости и значения показателей качества управления методом регулярного сканирования (блок 8).
Далее проводится проверка условия достижения заданных интервалов робастной устойчивости и показателей качества управления (блок 9). При невыполнении данных условий процедура коррекции объекта управления и синтеза РС для преобразованной модели циклически повторяется.
Если полученный вариант системы управления манипулятором отвечает требованиям робастности, то осуществляется выход из итерационной процедуры синтеза. При этом вычисляются параметры корректирующих связей (блок 10) по формуле (3.8), выполняется расчет фильтров, компенсирующих нули передаточных функций объекта (блок 11), вывод параметров основного регулятора состояния (блок 12) и завершение алгоритма.
В результате выполнения предложенной итерационной процедуры удается получить решение, отвечающее требованиям робастности либо наиболее близкое к нему в заданной области изменения сингулярных чисел и при заданном наборе каналов управления объектом.
5. Пример синтеза системы управления манипуляционным роботом. Рассмотрим применение метода для синтеза робастной системы управления двухзвенным манипуляционным роботом, структура которого приведена на рис. 2, а динамические свойства описываются уравнениями (1.2). Значения основных параметров манипулятора приведены в таблице, параметры 2-го звена J2 и m2 носят интервальный характер, параметры приводных устройств Kp1 = 1 Н м, Kp2 = 1 Н и T1 = = 0.02 c, T2 = 0.02 c.
Таблица.
Номинальные значения параметров манипулятора
| Номер звена | Масса звена, кг | Длина звена, м | Расстояние до центра масс, м | Момент инерции звена, кг м2 |
|---|---|---|---|---|
| i | mi | li | pi | Ji |
| 1 | 50 | 0.4 | 0.22 | 0.32 |
| 2 | 22.5 ± 10 | 1.14 | 0.7 | 1.2 ± 0.5 |
Первоначально для данного МР был выполнен синтез системы с сепаратными каналами управления и локальными регуляторами на основе линейной модели (1.3), не учитывающей влияние перекрестных связей между каналами.
Синтез локальных регуляторов состояния 1-го и 2-го звеньев МР осуществлялся методом модального управления на основе желаемого характеристического полинома Ньютона D(s) = = ${{(s + {{\Omega }_{o}})}^{2}}$ при заданном значении ${{\Omega }_{o}}$ = 15.5 рад/с, в результате были получены следующие значения параметров: K1 = [–7.477 × 10–5.795 × 102] и K2 = [–7.068 × 102–5.478 × 103].
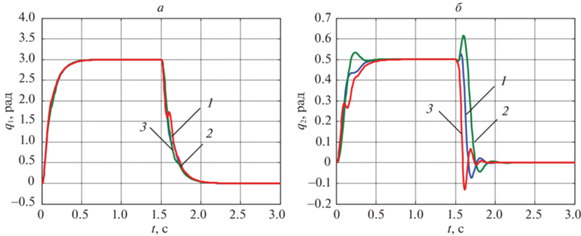
Переходные характеристики полученной САУ МР с локальными регуляторами при одновременном ступенчатом задающем воздействии по обоим каналам приведены на рис. 5, а и б, где кривые 1 соответствуют номинальным параметрам объекта, кривые 2 и 3 – изменению массы m2 в пределах ±50%.
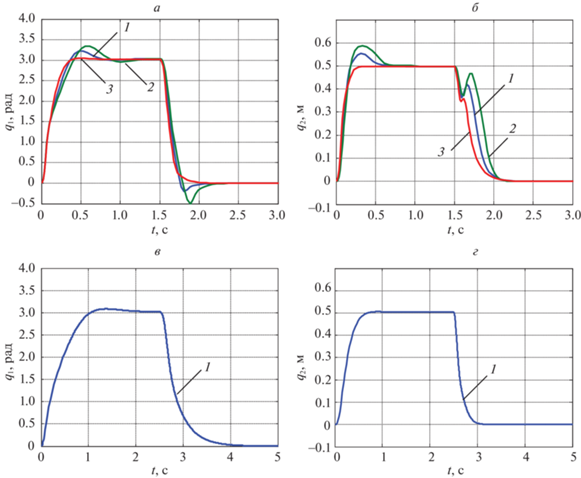
Полученная система не удовлетворяет предъявляемым требованием апериодичности переходных процессов, поскольку при одновременном пуске звеньев из-за влияния перекрестных связей, а также изменения параметров объекта возникает существенное перерегулирование по положению 1-го и 2-го звеньев.
Снижения быстродействия локального контура управления 1-м звеном манипулятора при уменьшении СГК характеристического полинома до ${{\Omega }_{o}}$ = 5.5 рад/с позволяет обеспечить близкий к апериодическому характер переходных процессов по выходным координатам САУ. Однако в этом случае время переходных процессов в системе по координате q1 существенно возрастает, как показано на рис. 5, в и г.
Введение в систему управления автономизирующих каналов компенсации влияния перекрестных связей в соответствии с формулами (1.4) при расчетных параметрах объекта обеспечивает высокий темп и апериодический характер переходных процессов. Вместе с тем при учете малых постоянных времени приводных устройств T1 и T2, а также при изменении массы m2 переходные процессы по координате q2 приобретают колебательный характер, что иллюстрирует рисунок 6.
Синтез САУ МР с централизованным регулятором состояния будем проводить на основе приведенной на рис. 3 линейной модели, векторно-матричное описание которой имеет вид (2.1). В состав объекта управления при этом входят локальные регуляторы с параметрами K1 = [–2.653 × × 10–7.296 × 102] и K2 = [–7.068 × 102–5.478 × 103].
В результате идентификации линейной и нелинейной моделей манипуляционного робота с использованием симплексного метода были определены значения коэффициентов линеаризации: K11 = 5.517; K13 = K31 = 8.025; K41 = 3.21; K43 = 2.334 в рабочей точке ${{\dot {q}}_{1}}$ = 0.32 рад/с, ${{\dot {q}}_{2}}$ = 0.22 м/с и q2 = = 0.55 м. Подставляя полученные коэффициенты в выражения (2.1), получим следующие значения матриц линейной модели:
(5.1)
$\begin{gathered} {\mathbf{A}} = \left[ {\begin{array}{*{20}{c}} { - 12.679}&{ - 30.914}&{ - 3.118}&{ - 1.247} \\ 1&0&0&0 \\ {0.4}&0&{ - 28.0}&{ - 195.84} \\ 0&0&1&0 \end{array}} \right];\quad {{{\mathbf{B}}}_{1}} = \left[ {\begin{array}{*{20}{c}} {0.342} \\ 0 \\ 0 \\ 0 \end{array}} \right];\quad {{{\mathbf{B}}}_{2}} = \left[ {\begin{array}{*{20}{c}} 0 \\ 0 \\ {0.0438} \\ 0 \end{array}} \right]; \\ {\mathbf{C}} = \left[ {\begin{array}{*{20}{c}} 0&1&0&0 \\ 0&0&0&1 \end{array}} \right]. \\ \end{gathered} $Синтез централизованного РС для линейной модели объекта на основе желаемого характеристического полинома Ньютона $D(s) = {{(s + {{\Omega }_{o}})}^{4}}$ при ${{\Omega }_{o}}$ = 16.5 рад/с дает следующие значения:
Для компенсации влияния нулей передаточных функций объекта по 1-му и 2-му каналам управления на динамические характеристики САУ с централизованным РС используются фильтры задающих воздействий:
(5.2)
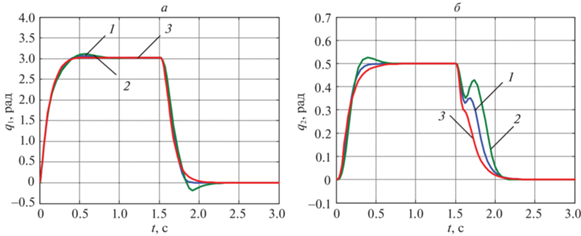
${{H}_{{F1}}}(s) = \frac{1}{{{{T}_{{11}}}s + 1}};\quad {{H}_{{F2}}}(s) = \frac{1}{{({{T}_{{21}}}s + 1)({{T}_{{22}}}s + 1)}},$Переходные характеристики САУ МР с централизованным регулятором состояния, приведенные на рис. 7 (кривые 1 соответствуют номинальным параметрам объекта, кривые 2 и 3 – изменению массы m2 в пределах ±50%), говорят о высокой чувствительности к вариациям параметров объекта управления, т. е. полученное решение не отвечает требованиям робастности.
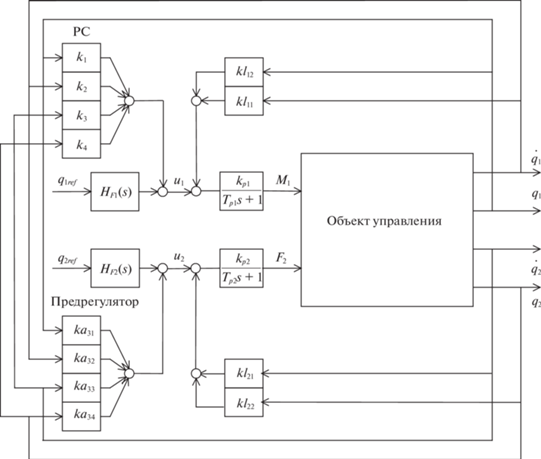
В целях повышения параметрической грубости централизованной системы управления манипуляционным роботом воспользуемся предложенным грамианным методом. Примем вход контура управления 1-м звеном u1 в качестве основного, а вход контура управления 2-м звеном u2 используем для коррекции системных свойств объекта, что соответствует матрице E = [0 0 1 0]. Тогда структура робастной системы, включающая в себя регулятор состояния с матрицей K и корректирующий предрегулятор с матрицей ${\mathbf{A}}{\kern 1pt} '$, будет иметь вид, приведенный на рис. 8.
Рис. 8.
Структура двухканальной робастной САУ манипулятором с централизованным регулятором состояния
Реализуемая средствами комплекса MatLab для линейной модели МР с параметрами (5.1) процедура вычисления грамиана управляемости gram с последующим сингулярным разложением svd дает следующие результаты:
Относительно малые значения 3-го и 4-го сингулярных чисел грамиана свидетельствуют о низкой степени управляемости объекта.
Применение предложенного итерационного алгоритма (рис. 4) дает новое распределение сингулярных чисел грамиана управляемости объекта, позволяющее решить задачу синтеза робастной системы с регулятором состояния:
Желаемое распределение сингулярных чисел грамиана управляемости достигается путем коррекции 3-й строки матрицы состояния объекта ${\mathbf{\hat {A}}} = {\mathbf{A}} - {\mathbf{A}}{\kern 1pt} '$, физически реализуемой введением в структуру САУ дополнительного регулятора с параметрами:
Для скорректированного таким образом объекта с матрицами состояния ${\mathbf{\hat {A}}}$ и входа B1 методом модального управления синтезируется робастная система с регуляторами состояния.
Синтез основного регулятора состояния был проведен на основе желаемого характеристического полиномы Ньютона $D(s) = {{(s + {{\Omega }_{o}})}^{4}}$ при заданном значении ${{\Omega }_{o}}$ = 16.5 рад/с по линейной модели скорректированного объекта:
Параметры компенсирующих влияние нулей передаточных функций объекта фильтров (5.2) в этом случае принимают значения: T11 = 0.05 c ; T21 = 0.047 c, T22 = 0.063 c.
Переходные характеристики системы управления, полученные с учетом нелинейных свойств объекта, приведены на рис. 9, где кривая 1 соответствует номинальным параметрам объекта, кривые 2 и 3 – изменению массы 2-го звена в пределах ± 50%.
Рис. 9.
Переходные характеристики робастной САУ манипулятором с централизованным регулятором состояния
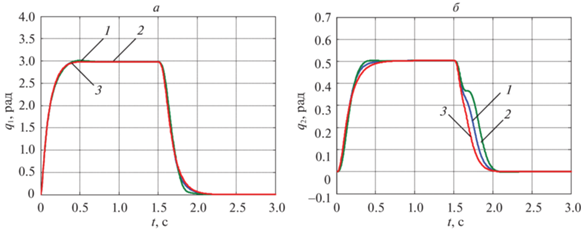
Как показывает анализ, система обладает робастными свойствами и обеспечивает существенное (почти двукратное) снижение длительности и апериодический характер переходных процессов относительно точек позиционирования звеньев в условиях заданных вариаций их параметров.
Заключение. Таким образом, разработанный метод синтеза САУ манипуляционным роботом позволяет достаточно эффективно решать задачу повышения ее быстродействия за счет существенного улучшения робастных свойств, т.е. снижения чувствительности к технологическим вариациям параметров, а также к их изменениям, обусловленным взаимным влиянием звеньев при их интенсивных одновременных перемещениях.
В этом отношении предложенный подход может рассматриваться как более удачная альтернатива методу автономизации локальных каналов управления звеньями манипулятора при помощи компенсирующих связей. В данном случае эффект достигается не за счет малоробастной автономизации каналов управления, а путем улучшения их взаимосвязи, управляемости и координации (согласованности), реализуемыми управляющими устройствами, синтезируемыми на основе математического аппарата грамианов. При этом осуществляется поэтапная процедура синтеза робастной системы управления манипуляционным роботом повышенного быстродействия.
На первом этапе выполняется линеаризация модели манипуляционного робота в рабочем режиме с использованием оптимизационных методов идентификации и формирование векторно-матричного описания объекта управления.
На втором этапе преобразуется структура линейной модели объекта в направлении повышения управляемости путем коррекции сингулярных чисел грамиана управляемости. Сформированная таким образом структура реализуется предрегулятором путем введения дополнительных прямых и обратных связей, определяемых с учетом физических особенностей объекта.
На третьем этапе осуществляется классический синтез централизованного регулятора состояния методом модального управления для скорректированной структуры линейной модели и применение полученных управляющих устройств для управления исходным нелинейным объектом.
Предложенный метод позволяет разработчикам повысить качество управления манипуляционными роботами и их производительность в условиях вариаций параметров и интенсификации технологических процессов.
Список литературы
Siciliano B., Sciavicco L., Villani L., Oriolo G. Robotics: Modeling, Planning and Control. L.: Springer-Verlag, 2009. 644 p.
Lynch K.M., Park F.G. Modern Robotics: Mechanics, Planning and Control. Cambridge University Press, 2017. 642 p.
Mechatronic System Control, Logic and Data Acquisition. The Mechatronic Handbook / Ed. R.H. Bishop. Second Edition. N. Y.: CRC Press, Taylor and Francis Group, 2008. 755 p.
Bolton W. Mechatronic: Electronic Control Systems in Mechanical and Electrical Engineering, Sixth Edition, Harlow. Edinburgh Gate: Pearson Education Limited, 2015. 663 p.
Control System Advanced Methods. The Control Handbook / Ed. W.S. Levin. Second Edition. N. Y.: CRC Press, Taylor and Francis Group, 2011. 1702 p.
Тарарыкин С.В., Тютиков В.В. Робастное модальное управление динамическими системами // АиТ. 2002. № 5. С. 41–55.
Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука, 2002. 303 с.
Анисимов А.А., Тарарыкин С.В. Итерационный метод структурно-параметрического синтеза робастных систем с регуляторами состояния на основе грамианного подхода // Изв. РАН. ТиСУ. 2018. № 4. С. 42–56.
Мироновский Л.А., Соловьева Т.Н. Анализ и синтез модально-сбалансированных систем // АиТ. 2013. № 4. С. 59–79.
Ober R., McFarlane D. Balanced Canonical Forms for Minimal Systems: A Normalized Coprime Factor Approach // Linear Algebra Appl. 1989. V. 122–124. P. 23–64.
Moore B.C. Principal Component Analysis in Linear Systems: Controllability, Observability and Model Reduction // IEEE Trans. Automat. Control. 1981. V. AC-26. P. 17–32.
Tararykin S.V., Anisimov A.A., Gerasimov A.A. Synthesizing Parametrically Robust Control Systems with State Controllers and Observers Based on Gramian Method // IJCAS. 2019. V. 17. № 10. P. 2490–2499.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления