

Известия РАН. Теория и системы управления, 2022, № 2, стр. 137-161
ИСКУССТВЕННЫЕ МЫШЦЫ (ОБЗОРНАЯ СТАТЬЯ)
А. П. Алисейчик a, Д. А. Грибков a, А. Р. Ефимов b, И. А. Орлов a, *, В. Е. Павловский a, А. В. Подопросветов a, И. В. Хайдукова a
a ИПМ им. М.В. Келдыша РАН
Москва, Россия
b ПАО Сбербанк
Москва, Россия
* E-mail: i.orlov@keldysh.ru
Поступила в редакцию 12.05.2021
После доработки 22.07.2021
Принята к публикации 27.09.2021
- EDN: EPQWRR
- DOI: 10.31857/S0002338822010024
Аннотация
Представлен обзор текущего состояния разработок в области систем и приводов для управления мягкими экзоскелетами. Предметом изучения являются наиболее важные прототипы податливых приводов. Рассматриваются применения данных приводов в медицине и промышленности. Приведены классификация и рекомендации по построению подобных аппаратов на основе анализа эффективности существующих макетов сторонними исследовательскими группами.
Словарь терминов:
AJB – active joint brace (тяга активного шарнира),
ASO – active soft orthotic (активное мягкое ортопедическое приспособление),
APAM – anisotropic PAM (анизотропный пневмомускул),
BLDC – brushless direct current (DC) motor (бесколлекторные постоянного тока),
BLAC – brushless alternating current (AC) motor (бесколлекторные переменного тока),
CP – conducting polymer (проводящий полимер),
CNT – carbon nanotube (углеродные нанотрубки),
DEA – dielectric elastomer actuators (диэлектрические эластомерные приводы),
DMSP/MAS – наименование серий пневмомускулов компании Festo,
EAP – electroactive polymer (электроактивные полимеры),
EA – elastomer actuator (упругий привод),
ECF – electro-conjugate fluid (электроконъюгированная жидкость),
EEAP – электронные EAP,
FEA – fluidic elastomer actuator (жидкостный упругий привод),
FDM – fused deposition modeling (моделирование методом послойного наплавления),
PAM – pneumatic artificial muscles (пневмомускул),
PPAM – pleated PAM (гофрированный пневмомускул),
VIA – variable Impedance actuators (привод с переменным сопротивлением),
SEA – series elastic actuators (механизмы, использующие последовательные пружины),
SPEA – series–parallel elastic actuation (последовательно-параллельный упругий привод),
SMA – shape-memory alloy (эффект памяти формы),
MACCEPA – mechanically adjustable compliance and controllable equilibrium position actuator (механизмы с переменным механическим сопротивлением),
HAM – hydraulic McKibben artificial muscles (гидравлический искусственный мускул),
HAL – hybrid assistive limb (экзоскелет компании Cyberdyne),
IEAP – ionic EAP (ионные электроактивные полимеры),
искусственные сухожилия – нерастяжимые мягкие элементы,
искусственная мышечная ткань – engineered muscle tissue actuators,
мышцы антагонисты – мышцы, которые осуществляют движение в противоположных направлениях.
Введение. В современных системах управления носимыми роботизированными устройствами, в частности экзоскелетами и ортезами, используются двигатели, редукторы, цилиндры, насосы, клапаны и компрессоры. Они служат для приведения в действие частей конструкций. Активные экзоскелеты содержат приводы (actuators – исполнительные или управляющие механизмы), преобразовывающие энергию в механическое движение и приводящие в действие суставы экзоскелета. Пассивные экзоскелеты вместо этого применяют материалы, способные запасать и использовать энергию движений [1].
Большинство типов приводов, используемых в робототехнике, нельзя применять в экзоскелетах. Причиной этому является то, что для этого требуются высокие крутящие моменты с более высокими скоростями, чем те, которые могут обеспечить большинство приводов. Также эти компоненты предназначены для промышленного применения, а не для ношения их на теле, так как обычно они требуют создания тяжелых, жестких и громоздких конструкций, тогда как эффективный экзоскелет должен быть легким и носимым. К тому же повышенная сложность конструкции промышленных приводов может существенно увеличить стоимость экзоскелета.
Таким образом, только часть используемых в промышленности управляющих механизмов может быть применена для разработки экзоскелетов. Основными кандидатами среди них являются электрические, пневматические, гидравлические и последовательные упругие механизмы SEA [2]. Детальная классификация искусственных мышц, применяемых в экзоскелетах, состоит из следующих типов.
Активные:
1) пневматические:
пневматические мышцы (PAM),
мышцы МакКиббена,
гофрированные мышцы МакКиббена (PPAM),
изгибные пневматические мышцы;
2) жидкостные эластомерные управляющие механизмы (FEA):
гидравлические мышцы МакКиббена,
pH-чувствительные мышцы МакКиббена,
гидравлические;
3) электродвигатели:
коллекторные двигатели постоянного тока,
бесколлекторные двигатели постоянного тока,
бесколлекторные двигатели переменного тока,
ультразвуковые двигатели,
сервоприводы,
пьезоэлектрические двигатели;
4) гидравлические цилиндры;
5) пневматические цилиндры;
6) тросовые приводы;
7) механизмы с переменным сопротивлением (VIA):
механизмы с регулированием податливости (MACCEPA),
механизмы, использующие последовательные пружины (SEA).
Пассивные:
1) пружины;
2) упругие структуры;
3) твердотельные элементы;
4) эластичные тросы;
5) газлифты;
6) SMA.
Расположение привода непосредственно на месте управления суставом (direct drive), несомненно, удобнее, так как это позволяет упрощать конструкцию и уменьшать общий размер устройства [3]. Однако иметь привод, например на запястье, было бы неудобно, так как это увеличивает момент в локте и плече. Таким образом, при отсутствии непосредственного соединения привода с подвижной частью экзоскелета, как это реализовано, например, в мышцах МакКиббена, используются механизмы передачи усилия (power transmission). Данные механизмы могут иметь следующие варианты реализации [4, 5]:
1) зубчатые передачи (gear drives);
2) тросовые передачи (cable drives);
3) мальтийский механизм (geneva drive);
4) звенья (linkage mechanism);
5) прямое соединение (direct drive);
6) растяжение “искусственных сухожилий” (tendon drive);
7) муфты;
8) гидравлическая жидкость (hydraulic fluid/oil);
9) воздух (pneumatic fluid);
10) винтовые передачи;
11) цепные передачи;
12) ременные передачи.
Наиболее используемыми механизмами передачи являются тросы, механические звенья и зубчатые передачи [6].
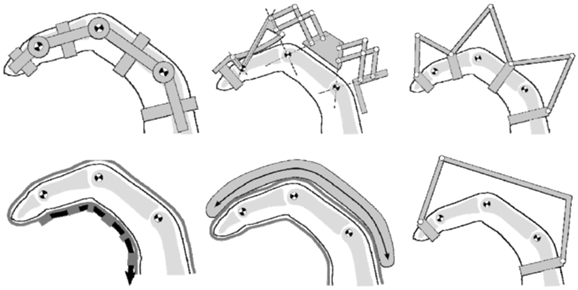
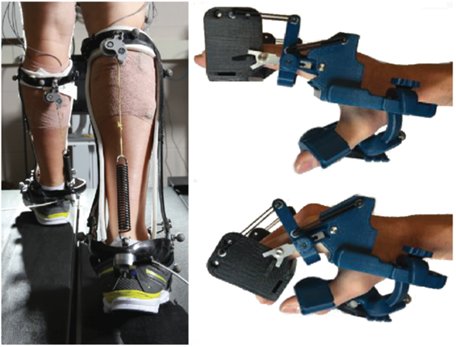
Одной из важных проблем, возникающих при передаче движения к определенному суставу человека, выступает выравнивание центров вращения звеньев экзоскелета относительно центров вращения суставов. Экзоскелет должен обладать возможностью настройки конструкции таким образом, чтобы решить эту проблему для разных пользователей, у которых различаются длины конечностей и размеры суставов. На рис. 1 на примере экзоскелетов кисти представлены возможные варианты конструкции, предназначенные для согласования центров вращения звеньев с центром вращения суставов или устранения необходимости точного выравнивания [6].
Рис. 1.
Варианты конструкции, предназначенные для согласования центров вращения звеньев с центром вращения суставов или устранения необходимости точного выравнивания
Управление, наиболее часто встречающееся в современных экзоскелетах, основывается на электромагнитных двигателях и подаче жидкости или газа в камерах давления изменяемого объема. Данное изменение управляется электрически, гидравлическим насосом или пневматическим компрессором [5, 7, 8]. Наиболее используемым типом являются мышцы с электродвигателями. На примере обзора экзоскелетов 2011 г. 65% экзоскелетов включало электродвигатели, 27% управлялись пневматическими мышцами, а оставшиеся 8% имели пневматические и другие системы управления [9]. Обзор 2016 г. показал схожие данные с применением электродвигателей в 67% случаев, гидравлических насосов – в 12% и пневматических компрессоров – в 21% [5]. По данным работы 2017 г., электродвигатели применяются в 72% активных экзоскелетов [10].
Экзоскелеты можно разделить как по активности мышц, так и по их жесткости. Конструкции, использующие мягкие искусственные мышцы, более характерны мягким экзоскелетам. Корпус мягких роботов и экзоскелетов изготавливается из мягких или растяжимых материалов. Эти роботы имеют непрерывно деформируемую структуру с мышечно-подобным приводом, которая имитирует биологические системы и дает относительно большое число степеней свободы по сравнению с их твердотельными аналогами. Соответственно жесткие искусственные мышцы состоят в основном из жестких элементов. В зависимости от конструкции и применяемых механизмов передачи усилия один тип искусственных мышц может относиться как к мягкому, так и к жесткому типу.
1. Мягкие типы искусственных мышц. Отличительной особенностью мягких мышц является то, что по своей податливости они схожи с биологическими тканями человека, что повышает удобство их использования и снижает риск травмы такими элементами.
Достоинства мягких типов искусственных мышц:
безопасное взаимодействие с человеком и окружающей средой;
простая структура мышц;
простой алгоритм управления;
гибкая форма мышц, которая может давать больше степеней свободы и позволяет лучше адаптироваться к анатомии.
Недостатком мягких искусственных мышц выступает невозможность создания большой силы [7]. К мягким искусственным мышцам относятся:
упругие структуры;
PAM;
FEA;
SMA;
тросовые приводы.
Основные варианты конструкции мягких мышц, представленные на рис. 2, делятся на:

изгиб в результате продольного натяжения (например, троса или сплава с памятью формы);
сжатие из-за поперечно расположенных активных элементов;
сжатие в результате раздутия пневматической трубки в плетеной оболочке;
изгиб пневматической или гидравлической сети каналов в эластомере вокруг более жесткого материала (pneu-nets) [11].
1.1. Упругие структуры. 1.1.1. Твердотельные элементы. Наиболее простым решением в качестве поддерживающих и управляющих конструкций экзоскелета являются упругие жесткие элементы, восстанавливающие свою форму после деформации без дополнительных воздействий. При полной автономности экзоскелета основной недостаток – его малая эффективность. Данный тип конструкции широко применяется в недорогих промышленных экзоскелетах [12], а также хорошо подходит для реабилитации детей с целью компенсации гравитации [13] (рис. 3). Подобные экзоскелеты могут быть как полностью жесткими, так и мягкими.
Рис. 3.
Экзоскелет Laevo 2.5 (слева), пассивный детский экзоскелет для компенсации гравитации Playskin lift (справа)
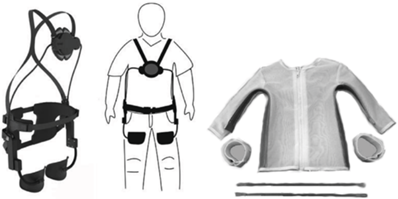
1.1.2. Эластичные тросы. Другой разновидностью простого дизайна является использование эластичных тросов и лент. Такие пассивные экзоскелеты создают меньшую нагрузку на конечности и подходят для реабилитации после травм и инсультов. Данный тип экзоскелетов удобен для самостоятельного применениия, а также имеет низкую стоимость. Примером подобных систем может служить отечественный экзоскелет нижних конечностей лечебнный костюм (ЛК) “Регент” [14] (рис. 4).

1.2. PAM. Приводы, основанные на PAM, могут генерировать силу только за счет сокращения, поэтому для реализации каждой степени свободы часто используются пары PAM для создания двунаправленного движения аналогично мышцам-антагонистам.
1.2.1. Мышцы МакКиббена. Наиболее распространенной моделью PAM являются мышцы МакКиббена, предложенные в 50-х годах. С этого момента разные компании, такие, как Bridgestone Co., Shadow Robot Company, Merlin Systems Corporation, Festo, выпускали, совершенствовали и патентовали различные варианты мышц МакКиббена. Единый принцип действия этого типа мышц представлен на рис. 5. Подобный тип мышц переводит объемное увеличение внутреннего пространства в продольное сжатие с силой, значительно превышающей эквивалентную гидравлическую или пневматическую систему [16].
В отличие от других пневматических приводов, таких, как различные поршневые устройства и пневмоцилиндры, работа пневматической мышцы в гораздо меньшей степени зависит от внешней температуры, влажности и прочих факторов. В случае, когда концы герметичны, применение мышцы возможно даже в воде и на глубине. Через компрессор внутрь мышцы подается обычный воздух, без специальной фильтрации и впрыскивания масляных примесей, поэтому нет необходимости в проведении специального технического обслуживания, а также при работе не будет возникать явление застоя.
К левому, закрепленному концу мышцы подведен шланг от компрессора. Рассмотрим модель мышцы, изображенной на рис. 6. Далее обозначим: ${{x}_{0}}$ – начальная длина; ${{y}_{0}}$ – начальный диаметр; ${{d}_{0}}$ – диаметр шланга (входного отверстия); $Q$ – расход (характеристика компрессора); $\theta $ – угол намотки нити относительно горизонтальной оси; $p$ – разница созданного в мышце давления и атмосферного из предположения, что рассматриваются только два состояния: полностью напряженной и полностью расслабленной мышц; $\vec {F}$ – тяговое усилие, создаваемое на конце мышцы; $d{{\vec {r}}_{x}}$ – вектор перемещения крайней правой точки; $F$ и $dx$ – проекции векторов силы и перемещения на ось $Ox$.
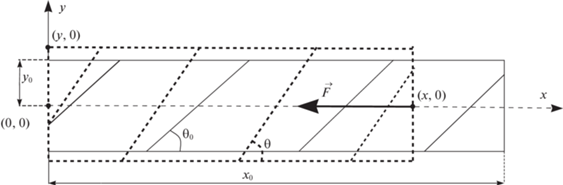
Допущения: оболочка мышцы тонкая, мышца в процессе сокращения остается цилиндрической, газ считается идеальным.
Статическая задача: работа идеального газа будет равна $A = pdV$. В то же время эта работа преобразуется в работу по перемещению правого конца мышцы: $pdV = (\vec {F},d{{\vec {r}}_{x}}) = Fdx$.
Приравнивая расход компрессора к изменению объема мышцы [17], добавив ограничения на движение, получим систему, описывающую кинематику правого свободного конца:
Тогда из закона изменения энергии следует движениe точки массы m, закрепленной на правом конце:
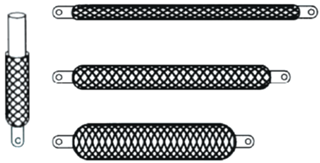
Так, компания Festo выпускает наиболее распрастраненный аналог мышцы МакКиббена –“Пневмомускул DMSP/MAS” (fluidic muscle DMSP/MAS), состоящий из резинового шланга, армированного арамидным волокном изнутри (рис. 7) [18]. Аналоги данной конструкции часто используются в разработке экзоскелетов [19, 20].

Одним из наиболее известных экзоскелетов, применявших мышцы МакКиббена, является мягкий экзоскелет нижних конечностей Soft exosuits, созданный в Гарвардском университете. Предшествующий прототип конструкции использовал мышцы МакКиббена (рис. 8), однако они требовали мощный компрессор и были более сложными в управлении. Поэтому в последнем прототипе они были заменены на редуктор с бесколлекторными электродвигателями постоянного тока Maxon EC 4pole, натягивающими боуден-тросы (рис. 8). Благодаря этому была реализована автономность экзоскелета [21, 22].
Рис. 8.
Предшествующий пневматический прототип экзоскелета Soft exosuits (слева), современный вариант автономного экзоскелета Soft exosuits (справа)
1.2.2. PPAM. PAM, также называемые PMA (pneumatic muscle actuator) также разрабатывались в брюссельском университете Vrije Universiteit с 1995 г. [23]. Первое поколение гофрированных искусственных мышц – PPAM 1.0 – было способно генерировать продольную силу до 5 кН при массе в 100 г. Для решения проблемы утечек и малого срока службы был предложен второй прототип – PPAM 2.0 – с измененным составом мембраны (рис. 9). Третий вариант PPAM 3.0 отличается более простым процессом изготовления, включающим аддитивные технологии FDM, повышенной надежностью, широким диапазоном размеров (от 4 до 50 см) и меньшей массой. Сравнение PPAM с пневмомускулом от Festo в 2012 г. показало, что PPAM имеет схожий диапазон генерирования силы, проигрывает Festo по толщине мышцы, но выигрывает по массе, что обеспечивает лучшие соотношения силы к массе и энергии к массе [24].

1.2.3. Гидравлические мышцы МакКиббена. Гидравлические мышцы МакКиббена (HAM) являются новым поколением, в котором воздух заменен на масло или воду. Достоинство данного типа мышц состоит в возможности использования меньших насосов по сравнению с обычными мышцами МакКиббена. Сила, генерируемая механизмом, зависит от его размера. Однако следует отметить, что время срабатывания гидравлического типа мышц больше, чем пневматического [15].
1.2.4. pH-чувствительные мышцы МакКиббена. Другая вариация мышц МакКиббена – замена сжатого воздуха на pH-чувствительные мышцы МакКиббена (pH-activated McKibben artificial muscle), в состав которых входят pH-регулируемые сферы гидрогеля. Для увеличения и уменьшения объема этих сфер применялся поток растворов оснований и кислот. Недостатками являются медленное время срабатывания, малая деформация мышцы и необходимость дополнительных резервуаров и конструкций для создания потока раствора [15].
1.2.5. Изгибные пневматические мышцы. Широко используемым типом пневматических мышц служат изгибные пневматические мышцы (bending type pneumatic muscle). Их конструкция вызывает при раздутии изгиб в ту или иную сторону. Широкое применение этого типа мышц позволило выделить его в отдельную категорию искусственных мышц – эластомерные управляющие механизмы EA. Так как раздутие мышцы может проводиться при помощи жидкости или газа, они носят название жидкостных эластомерных управляющих механизмов FEA [6]. Мышцы такого типа также носят название анизотропных APAM. Два типа конструкции подобных искусственных мышц были предложены в исследовании Сеульского университета [25]. Первый вариант включает в себя неравномерное распределение армирующих нитей. Второй вариант, похожий на пневматические ячейки (pneu-nets), представляет собой мышцу с узкими канавками, поперечно расположенными с одной стороны, что увеличивает площадь поверхности и приводит к изгибу (рис. 10).
Рис. 10.
Анизотропные пневматические мышцы с неравномерным армированием (слева) и с поперечно расположенными канавками (справа)

1.3. FEA-мышцы. В жидкостных эластомерных управляющих механизмах эластомерные слои деформируются под давлением жидкости. Давление, используемое в FEA, может генерироваться пневматически или гидравлически. Среди всех мягких типов мышц пневматические и гидравлические наиболее распространены, однако в настоящее время ведется много разработок в области электроактивируемых эластомерных мышц. Для реализации асимметричного сокращения эластомерных мышц часть конструкции выполняется из более прочного материала. Другим вариантом является армирование эластомера, что снижает возникающие в нем напряжения и риск его повреждения. Также был предложен вариант использования SMA, изгиб которого управляется температурой жидкости, подаваемой внутрь мышцы [6].
1.3.1. Пневматические. Пневматические эластомерные конструкции на основе pneu-nets отличаются необходимостью наличия больших деформаций для активации движений, что приводит к большему времени срабатывания и частым нарушениям структуры из-за разрывов. Однако более сложные варианты конструкции снижают объем воздуха, необходимый для приведения мышц в движение, что благоприятно отражается на времени срабатывания [11]. Пневматическая активация FEA часто предпочтительнее гидравлической благодаря простоте хранения воздуха, небольшой массе, безвредности для окружающей среды и высокой скорости срабатывания [26]. Также в Сеульском университете были разработаны плоские пневматические эластомерные мышцы, имеющие меньшие габариты по сравнению со стандартными вариантами пневматических конструкций (рис. 11). Плоские FEA были использованы при создании экзоскелета нижних конечностей Second Skin. Экзоскелет разрабатывался для детской реабилитации, поэтому поведение прототипа было изучено на распечатанной модели нижней конечности ребенка. Испытания показали максимальный угол сгиба ноги, равный 37°, с высокой степенью повторяемости результата (1–3°) [27].
Рис. 11.
Сравнение стандартных воздушных камер с плоскими пневматическими FEA (сверху слева), вид плоских FEA в сдутом и раздутом состоянии (снизу слева), экзоскелет нижних конечностей (справа)
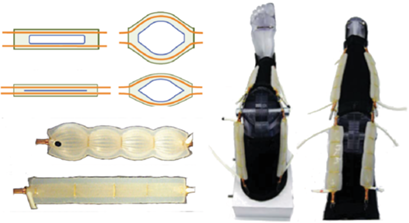
1.3.2. Гидравлические. Одним из примеров применения гидравлических FEA является мягкая роботизированная перчатка для реабилитации в домашних условиях. Эластичные приводы представляют собой композитные трубчатые конструкции, состоящие из эластомерной матрицы, армированной анизотропными волокнами (рис. 12). Портативная конструкция перчатки содержит гидравлические насосы и резервуар для воды для приведения в действие. Масса перчатки составляет 500 г, гидравлический источник питания и вспомогательные электромеханические компоненты закреплены на поясе [28].

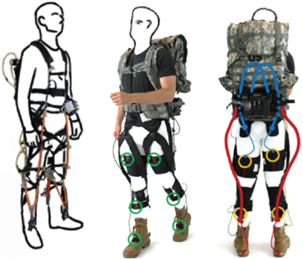
1.4. SMA. Материалы SMA (эффект памяти формы) применяются в искусственных мышцах благодаря их способности восстанавливать свою первоначальную форму при нагреве после предварительной деформации. Наиболее используемым сплавом с памятью формы является нитинол. Материал доступен в виде проволоки, труб, пружин или лент. Существуют материалы с односторонней и двусторонней памятью формы. При одностороннем эффекте памяти форма тела возвращается в исходное состояние после нагревания выше температуры перехода. После остывания форма тела не изменяется. При двухсторонней памяти материал способен восстанавливать две разные формы: одну при низких температурах, а другую – при высоких. В качестве искусственных мышц используют предварительно деформированные формы элементов из SMA. При нагреве форма возвращается в исходную, высвобождая полезную энергию. Активация мышц происходит путем подачи электрического тока через SMA или с помощью экзотермической реакции [5, 15, 29, 30]. SMA были применены в разработке экзоскелета нижних конечностей ASO для помощи во время одной из фаз ходьбы. Предварительная обработка нитиноловой проволоки включала отжиг при 400°C, что способствовало увеличению деформации мышцы, обеспечивая полный диапазон движения колена, но уменьшило ее выходную силу. ASO для коленного сустава имело четыре набора приводов на задней поверхности коленного сустава (для облегчения сгибания) и одного комплекта на передней поверхности (для облегчения разгибания). ASO для голеностопного сустава состояло из четырех наборов приводов: по одному на передней, задней и боковых поверхностях сустава (рис. 13). При активации мышцы общее отклонение составило 34°, что достаточно для помощи пациенту во время ходьбы. Однако стоит отметить очень большое время срабатывания – около 25 с [31]. В настоящее время продолжается совершенствование конструкций SMA, встроенных в ткани, которые позволят обеспечивать движения с несколькими степенями свободы более эффективно [32, 33].
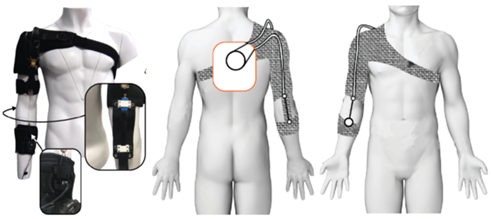
1.5. Тросовые приводы. Тросовые приводы применяются совместно с двигателями, пружинами и другими механизмами, обеспечивающими натяжение тросов. Наиболее используемым типом тросового привода являются боуден-тросы. Они позволяют передавать усилия от двигателя к определенной части экзоскелета. Примером применения боуден-тросов может служить экзоскелет локтевого сустава Soft elbow exosuit (рис. 14). Электродвигатель постоянного тока соединен с тросами. Тросы натягивают искусственное сухожилие, приводя в движение предплечье. Механизм блокировки удерживает натяжение, когда требуется статическое положение [34].
Достоинства и недостатки экзоскелетов, использующих мышцы мягкого типа, представлены в табл. 1–3.
Таблица 1.
Достоинства и недостатки экзоскелетов, использующих мышцы мягкого типа. Управляющие “сухожилия” (length variable tendon) [7]
| Достоинства | Недостатки |
|---|---|
| Тип мышц – кабели | |
| Использование наиболее простых в управлении и недорогих типов двигателей на внешней платформе для приведения в действие. | Необходимость дополнительных элементов: двигателей, пружин и т.д. |
| Двигатели располагаются удаленно, не увеличивая инерцию конечностей | |
| Тип мышц – SMA [15] | |
| Простота управления. | Относительно небольшая деформация (у SMA спиральной формы деформация выше). |
| SMA спиральной формы способны к деформации на 300% | |
| Может создавать высокую силу со скоростью и удельной мощностью, аналогичной человеческим мышцам. | Высокая стоимость. Повышенные требования к процессу обработки. |
| Сверхпластичность. | Высокий гистерезис |
| Сверхупругость. | |
| Кислотостойкость. | |
| Высокая скорость деформации без повреждений. | |
| Биосовместимость (некоторых сплавов) | |
Таблица 2.
Достоинства и недостатки экзоскелетов, использующих мышцы мягкого типа. Жидкостные управляющие механизмы (fluidic actuation) [7, 11]
| Достоинства | Недостатки |
|---|---|
| Тип мышц – пневматические эластомерные | |
| Доступность воздуха. | Проблемы внутренней утечки и трения. |
| Экологичность. | Сложность управления нелинейными характеристиками. |
| Небольшая масса. | Низкая пропускная способность |
| Для поддержания формы после деформации требуется небольшая дополнительная энергия. | |
| Переменная управляемая податливость. | |
| Хорошее соотношение силы к массе | |
| Тип мышц – гидравлические эластомерные | |
| Высокая сила (по сравнению с пневматическими приводами). | Проблемы внутренней утечки и трения |
| Низкий уровень шума. | |
| Высокая точность и плавность. | |
| Пыле- и влагозащита. | |
| Отсутствие открытых движущихся компонентов. | |
| Для поддержания формы после деформации требуется небольшая дополнительная энергия | |
Таблица 3.
| Достоинства | Недостатки |
|---|---|
| Высокое соотношение мощности к весу по сравнению с электродвигателями. | Возможна потеря герметичности. |
| Доступность воздуха. | Необходимость компрессора. |
| Аналогичность биологическим мышцам по анатомии, гибкости, мягкости, переменной жесткости. | Нелинейные характеристики активации, усложняющие управление PAM. |
| Низкий уровень шума. | Низкий диапазон частот управления (5 Гц), который может быть увеличен при добавлении заполнителей |
| Легкая интегрируемость с ортезом и одеждой, малозаметность. | |
| Управляемая податливость благодаря антагонистической активации. | |
| Устойчивость к влажной и грязной среде. | |
| Зависимость силы от размеров привода или рабочего давления. | |
| Небольшая масса. | |
| Малое время срабатывания. | |
| Высокая деформация (25–30%) |
Также проводятся активные разработки некоторых типов мягких искусственных мышц, которые в настоящий момент не удовлетворяют требованиям экзоскелетов, в основном по выходной силе и деформации, однако являются перспективными для экзоскелетов. Данные типы мышц находятся на стадии разработки или применения в роботах малых размеров [3, 5, 6, 15, 35].
К таким мышцам относятся:
1) полимерные молекулярные мышцы;
2) электросопряженная жидкость (electro-conjugated fluid);
3) искусственная мышечная ткань;
4) электроактивные полимеры (EAP).
Гидрогелевые молекулярные мышцы деформируются под действием света за счет окислительно-восстановительных реакций.
Электроконъюгированная жидкость (ECF) является разновидностью функциональной жидкости, которая создает струйный поток при воздействии высокого постоянного напряжения. Известно, что сильная струя ECF создается в неоднородном электрическом поле, например в поле с парой игольчатого и кольцевого электродов.
Искусственная мышечная ткань производится из различных материалов переплетением под определенным углом. Деформация происходит под действием тепловых или химических воздействий. Например, при нагревании волокна нейлона сжимаются, при этом увеличиваясь в диаметре, что заставляет их изгибаться. Прочным и достаточно гибким материалом служат углеродные нанотрубки, которые представляют собой длинные полые цилиндры из графена с сильными связями. Искусственное волокно при погружении в раствор электролита сокращается при подаче напряжения. Другим вариантом управляемой деформации является пропитка воском и нагревание.
Электроактивные полимеры меняют форму под действием электрического напряжения.
Типы EAP
1) ионные EAP (IEAP):
проводящие полимеры;
углеродные нанотрубки (CNT).
2) электронные EAP (EEAP):
диэлектрические эластомерные приводы (DEA).
Особенности перспективных типов искусственных мышц представлены в табл. 4, 5.
Таблица 4.
Особенности искусственных мышц EAP [7], потенциально подходящих для экзоскелетов
| Достоинства | Недостатки |
|---|---|
| Тип мышц – электронные | |
| Высокая плотность энергии. | Необходимость герметизации или защитного слоя на открытом воздухе. |
| Большая сила по сравнению с ионным классом. | Отсутствие материалов с достаточным крутящим моментом. |
| Быстрое время отклика в диапазоне миллисекунд. | Сложность изготовления |
| Длительное время работы. | |
| Возможность миниатюризации конструкции | |
| Тип мышц – ионные | |
| Низкое напряжение срабатывания. | Отсутствие материалов с достаточным крутящим моментом. |
| Большое сгибающее смещение. | Сложность изготовления |
| Возможность двунаправленного приведения в действие. | |
| Возможность миниатюризации конструкции | |
| Тип мышц – CP [15] | |
| Низкое рабочее напряжение. | Низкая деформация на сжатие (обычно достигает 2–10%), но возможно ее увеличение до 40%. |
| Способность к большим деформациям по сравнению с CNT. | Низкая скорость срабатывания (<1% в с) |
| Стоимость ниже, чем CNT. | |
| Наличие способов, повышающих деформацию и скорость срабатывания | |
| Тип мышц – CNT 5 | |
| Создание большой силы со скоростью и удельной мощностью, аналогичной человеческим мышцам. | Недостаточное генерирование мощности, деформации и силы из-за тонкости структуры |
| Высокая скорость срабатывания. | |
| Температурная стабильность. | |
| Высокая плотность энергии | |
| Тип мышц – DEA [5, 15] | |
| Способность генерировать напряжение, деформацию, скорость и удельную силу, аналогичные человеческим мышцам. | Недостаточное генерирование мощности и силы из-за малых размеров. |
| Способность определения положение без дополнительных датчиков. | Большие габариты и масса дополнительных конструкций. |
| Высокая деформация и скорость деформации | Низкая безопасность из-за высокого напряжения между пластинами |
2. Жесткие типы искусственных мышц. Наиболее часто роботы приводятся в действие жесткими двигателями, а различные сложные механизмы реализуются с помощью ротационных и линейных исполнительных систем [7].
К жестким искусственным мышцам могут относиться:
1) электродвигатели;
2) гидравлические цилиндры;
3) пневматические цилиндры;
4) пружины;
5) VIA.
Также в зависимости от конструкции и наличия жестких элементов следующие типы искусственных мышц могут относиться к жестким:
1) пневматические;
2) гидравлические;
3) SMA;
4) SEA;
5) тросовые приводы.
2.1. Электродвигатели. Элементами передачи от сервоприводных мышц могут выступать гармонические приводы, винтовые, ременные и цепные передачи и колеса [5]. Общими достоинствами использования электродвигателей являются:
легкое управление;
портативность при наличии батареи;
высокая эффективность.
Классификация электродвигателей [6, 36]:
1) постоянного тока:
коллекторные постоянного тока (brushed DC motor);
2) переменного тока:
асинхронные;
синхронные;
бесколлекторные постоянного тока (BLDC);
бесколлекторные переменного тока (BLAC);
электродвигатели шаговые;
ультразвуковые двигатели.
3) сервоприводы;
4) пьезоэлектрические двигатели.
2.1.1. Коллекторные двигатели постоянного тока. Коллекторные двигатели постоянного тока широко используются в разработке экзоскелетов благодаря простой конструкции привода, меньшей цене и простоте управления. Однако они требуют регулярного технического обслуживания из-за механического контакта между щеткой и коммутатором [6]. Электродвигатели постоянного тока были применены в прототипе HAL-5 экзоскелета всего тела HAL (рис. 15). Прототип, представленный в 2006 г., был улучшен за счет добавления менее габаритных двигателей постоянного тока, расположенных на плечах, локтях, бедрах и коленях. С помощью таких приводов и общего пластикового каркаса можно также улучшить дизайн экзоскелета по сравнению с предыдущими прототипами, например HAL-3. Энергоэффективность приводов позволяет автономное использование всей конструкции в течение 2 ч 40 мин, имея комплект аккумуляторов [37]. Также примером применения такого типа двигателей является экзоскелет верхней конечности AJB. Для перемещения частей конструкции применялся коллекторный двигатель постоянного тока. Крутящий момент передавался через тросовую систему с гибким корпусом. Для управления мышцами AJB использует электромиограмму, регистрируемую на сгибающих и разгибающих мышцах локтевого сустава. Эти сигналы определяют необходимый крутящий момент [38].

2.1.2. Бесколлекторные двигатели постоянного тока. Электродвигатель BLDC не только не требует регулярного технического обслуживания, но также обладает рядом преимуществ: высокая скорость и момент работы, более точное позиционирование, большая эффективность, низкий уровень шума. Кроме того, в двигателе BLDC вращается легкий постоянный магнит, благодаря чему малая инерция двигателя позволяет осуществлять быстрое ускорение и замедление [3, 6].
В экзоскелете Stuttgart Exo-Jacket, разработанном в институте Фраунгофера (Fraunhofer Institute for Manufacturing Engineering and Automation IPA), в качестве управляющих механизмов были использованы плоские вентильные двигатели высокой мощности при промощи волновой передачи (harmonic drive) (рис. 16). Момент на плечевом и локтевом суставах экзоскелета может превышать 40 и 25 Н$ \cdot $м соответственно, а скорость создания этого момента на суставах равна 107 и 155 град/c.

2.1.3. Бесколлекторные двигатели переменного тока. Недостатком всех двигателей постоянного тока является то, что они требуют механического сцепления и трансмиссии, что значительно увеличивает вес. Двигатели переменного тока позволяют решить эту проблему. Однако двигатели BLAC, как правило, дороже, чем BLDC [6].
2.1.4. Ультразвуковые двигатели. Основным достоинством ультразвуковых двигателей является то, что они не влияют на магнитные поля и не создают их. Это позволило использовать их в разработке экзоскелета кисти для параллельного проведения функциональной магнитно-резонансной томографии и исследования влияния реабилитации на процессы в мозге. Основной корпус экзоскелета был выполнен из пластика. Момент, генерируемый на двигателе, передавался на суставы кисти при помощи ременной передачи (рис. 17) [39].

2.1.5. Сервоприводы. Сервоприводы редко применяются в экзоскелетах. Они могут требовать ремонта после нескольких тысяч часов и им необходим энкодер. Сервопривод, имеющий в составе двигатель постоянного тока и развивающий необходимый момент, обладает существенным весом. Примером использования сервопривода постоянного тока RH-mini служит стационарный экзоскелет верхней конечности, разработанный в Японии [40]. Три степени свободы позволяли осуществлять полный диапазон движений запястья (рис. 18).

2.1.6. Пьезоэлектрические двигатели. Пьезоэлектрическим двигателем называется электрический двигатель, в котором механическое перемещение ведомого органа (ротора или якоря) осуществляется за счет пьезоэлектрического или пьезомагнитного эффекта [41]. Казалось бы, достаточно возбудить пьезоэлемент переменным электрическим напряжением и, с помощью известных механических средств преобразовать колебательное движение пьезоэлемента во вращательное движение ведомого органа. Однако, несмотря на простоту этого принципа, его трудно реализовать для амплитуд и частот колебаний пьезоэлемента, которые встречаются на практике. Поэтому такого рода двигатели в дальнейшем не будут рассматриваться в данной работе.
2.2. Гидравлические цилиндры. Гидравлические цилиндры могут находить применение в больших экзоскелетах, переносящих вес на землю, так как они способны генерировать большие усилия, но их трудно герметизировать. Они тяжелые и громоздкие, особенно с учетом необходимых насосов и компрессоров. Несмотря на эти недостатки, гидравлические линейные приводы находят применение в экзоскелетах нижних конечностей или всего тела. В экзоскелете нижних конечностей berkeley lower extremity exoskeleton (BLEEX) [42] гидравлические цилиндры были выбраны из-за высокой удельной мощности и несжимаемости жидкости, что позволяет реализовать широкий диапазон частот управления. Ротационные гидравлические приводы не использовались из-за более частых проблем с внутренними утечками и трением. В результате в экзоскелете BLEEX были применены линейные гидравлические приводы двустороннего действия (рис. 19). Они компактны, имеют небольшую массу и способны генерировать большую силу. Прототип BLEEX 2 имеет лучшие характеристики по габаритам и массе, которая составляет 14 кг [37].
Рис. 19.
Концепт использования линейного привода (слева), бедренная часть экзоскелета BLEEX (по центру), общий вид экзоскелета BLEEX 1 (справа)

2.3. Пневматические цилиндры. Наиболее распространенными промышленными экзоскелетами, использующими пневматические цилиндры, является серия Muscle suit компании Innophys [43]. Конструкция имеет два или четыре пневматических искусственных мускула, которые могут активироваться при поддутии воздуха в клапан на плече. За спиной рабочего располагается баллон со сжатым воздухом, однако система может быть также подключена к компрессору. В настоящий момент на рынке представлены три последние модели экзоскелета: Muscle suit [43], Muscle suit power [44] и Muscle suit edge [45] (рис. 20).

2.4. VIA. 2.4.1. MACCEPA. Механизмы с переменным механическим сопротивлением, использующие сервоприводы и пружины, также были разработаны исследовательской группой Robotics & Multibody Mechanics брюссельского университета Vrije Universiteit [46]. Данный тип привода позволяет отдельное механическое регулирование податливости и положения равновесия (рис. 21). Привод представляет собой регулируемую пружину кручения. Один сервопривод устанавливает угол $\alpha $, в нулевом значении определяющий положение равновесия, в котором пружина не будет создавать крутящего момента. Второй привод натяжением троса устанавливает предварительное натяжение пружины, которое влияет на величину создаваемого крутящего момента для определенного угла $\alpha $.

2.4.2. SEA. Механизмы, использующие последовательные пружины, применялись в реабилитационных устройствах, но они все сталкиваются с общим ограничением относительно постоянной жесткости упругого элемента, который зафиксирован в определенном положении (рис. 22). SEA представляет собой простое и эффективное решение, которое в основном состоит из редуктора, соединенного последовательно с пружиной, которая крепится к нагрузке [2].

К достоинствам SEA относится то, что они устраняют нелинейные эффекты двигателей, такие, как инерция, а также позволяют увеличивать точность управлением силы или крутящего момента. Кроме того, упрощается оценка генерируемой силы, так как она зависит от деформации пружин. Основным недостатком SEA является уменьшение рабочего диапазона частот из-за повышенной податливости системы, а максимальная жесткость системы ограничена жесткостью упругого элемента [47]. Прототип механизма, комбинирующего последовательное и параллельное использование пружин SPEA, был предложен в университете Брюсселя для устранения недостатка SEA путем управляемого вовлечения параллельно расположенных пружин. Достоинство концепции состоит в значительном снижении требования к крутящему моменту двигателя и в повышении эффективности [48]. Различные конфигурации и типы VIA представлены подробнее в обзоре [49].
В [47] исследователями из лаборатории Биомедицинской робототехники и биомикросистем был предложен компактный монолитный упругий элемент, разработанный для пассивного экзоскелета коленного сустава. Оптимизированная конструкция, представленная на рис. 23, подходит для создания нескольких последовательных/параллельных соединений SPEA.
Рис. 23.
Вид упругого элемента для экзоскелета коленного сустава в свободном (слева) и нагруженном состоянии (справа)
2.5. Пружины. Пассивные экзоскелеты, использующие простые пружины, отличаются простым дизайном и малой эффективностью. Они предназначены только для небольшого ассистирования в движениях и компенсации гравитации. Примерами таких экзоскелетов являются экзоскелеты нижних (рис. 24) [50] и верхних конечностей ArmAssist-2.0 (рис. 24) [51].
Рис. 24.
Пассивный экзоскелет нижних конечностей (слева) и верхних конечностей ArmAssist-2.0 (справа)
2.6. Газлифт. Газлифт или газовая пружина – это тип упругого механизма, который (в отличие от обычной механической пружины) применяет сжатый газ в закрытом цилиндре, ограниченный подвижным поршнем. Механизм используется для пневматического накопления потенциальной энергии и противостояния внешней силе, приложенной вдоль оси поршня. Различные конструкции позволяют механическую регулировку скорости хода, фиксацию поршня в различных положениях и другие настройки.
Применение газлифта (gas spring) в качестве искусственных мышц в экзоскелетах позволяет снизить физическую нагрузку, например при уходе за маломобильными пациентами. Преимуществами их применения является низкая стоимость и масса, а также простота использования. Экзоскелет нижних конечностей с помощью газлифта был разработан для персонала больницы, помогающего в переносе пациентов на небольшие расстояния. Газлифт, прикрепленный к одной из ног, снижает нагрузку на позвоночник и коленный сустав при подъеме пациентов (рис. 25) [52].

Достоинства и недостатки экзоскелетов, использующих мышцы жесткого типа, представлены в табл. 6.
Заключение. Исходя из обзоров [5, 9] и проанализированных статей был дополнен список критериев, которые необходимо учитывать при выборе искусственных мышц для проектирования экзоскелета (табл. 7).
Таблица 5.
Особенности типов искусственных мышц, потенциально подходящих для экзоскелетов
| Тип мышц | Недостатки |
|---|---|
| Полимерные молекулярные мышцы | Активация отдельных молекул должна быть скоординирована для хорошей производительности объемного привода. |
| Низкая эффективность | |
| Электросопряженная жидкость | Удельная мощность привода уменьшается с размером, что делает его неконкурентоспособным с электромагнитными приводами. |
| Низкая эффективность | |
| Искусственная мышечная ткань | Для функционирования требуется регулируемая среда [18]. |
| Сложность соединения ткани привода с механической нагрузкой |
Таблица 6.
Достоинства и недостатки различных типов мышц
| Достоинства | Недостатки |
|---|---|
| Тип мышц – электродвигатели [2, 3, 5, 53] | |
| Точность движения с точки зрения положения и скорости. | Жесткость превышает анатомическую. |
| Простота управления. | Сложность реализации регулируемого алгоритма управления. |
| Простота сборки из-за разработанности и распространенности двигателей. | Потребность в механизме передачи усилия, который может приводить к дополнительным недостаткам. |
| Высокая удельная мощность. | Низкий крутящий момент на низких скоростях |
| Снижение потребляемой энергии при ходьбе. | |
| Компактность и портативность. | |
| Низкая стоимость | |
| Тип мышц – гидравлические цилиндры [2, 5] | |
| Компактность. | Зависимость от стационарных источников давления или малая автономность. |
| Высокая удельная мощность. | Малая эффективность из-за потери энергии. |
| Высокая выходная сила. | Большой масса. |
| Широкий диапазон частот управления. | Проблемы внутренней утечки и трения. |
| Малая масса. | Большие габариты |
| Плавность активации. | |
| Быстрый отклик | |
| Возможность удаленного расположения. | |
| Зависимость выходной силы и скорости от размеров привода или рабочего давления. | |
| Низкий шум | |
| Тип мышц – пневматические цилиндры [2, 5] | |
| Высокая удельная мощность. | Зависимость от стационарных источников давления или малая автономность. |
| Высокая удельная сила. | Малая эффективность из-за потери энергии. |
| Небольшая масса. | Высокая податливость воздуха. |
| Упругий материал, минимальная потеря энергии. | Проблемы внутренней утечки и трения. |
| Низкий уровень шума. | Большие габариты |
| Не требуется дополнительной энергии для блокирования положения. | |
| Снижение диапазона частот управления. | |
| Возможность обратного хода. | |
| Управляемая податливость благодаря антагонистической активации. | |
| Устойчивость к влажной и грязной среде. | |
| Зависимость величины силы от размеров привода или рабочего давления | |
| Тип мышц – SEA 48 | |
| Простота конструкции | Крутящий момент, создаваемый соединением, должен генерироваться электродвигателем. |
| Небольшой рабочий диапазон частот | |
| Тип мышц – пружины | |
| Небольшая масса. | Не генерируют активных движений, ограничены упражнениями на приложение силы в противоположном направлении и балансированием силы тяжести |
| Простота конструкции | |
Таблица 7.
Критерии для выбора искусственных мышц при разработке экзоскелетов
| Критерий | Дополнение |
|---|---|
| Податливость | Для лучшего соответствия различным выполняемым задачам при реабилитации податливость должна иметь возможность регулирования |
| Удельная мощность | Необходимо выбирать привод с максимальной удельной мощностью. Этот критерий является одним из самых важных для разработки экзоскелета по данным статьи [2] |
| Удельная сила | Необходимо выбирать привод с высокой удельной силой. В исследовании [5] предполагается, что искусственные мышцы должны обеспечивать уровень силы, соответствующий мышцам человека |
| Конструкция | Центр масс в экзоскелете должен как можно меньше отличаться от центра масс человека |
| Форма | Мышцы экзоскелета должны быть минимально заметными, в идеале интегрированными или скрытыми под одеждой. Эргономичный дизайн критичен для частого использования экзоскелета |
| Стоимость | Максимально низкая |
| Уровень шума | Максимально низкий |
| Внешний вид | Необходимо обеспечить возможность очистки (пыле- и влагозащищенность). Экзоскелет не должен содержать открытые части, или они должны быть безопасными |
| Безопасность | Необходимо ограничение диапазона движения, скорости и силы для предотвращения вреда суставам |
| Автономность | В исследовании [5] в качестве рекомендуемого времени работы автономного экзоскелета предлагается 8 ч |
| Биомеханическое соответствие | Параметры и тип искусственных мышц должны обеспечивать плавность, скорость, ускорение и диапазон движений, соответствующие конкретному пользователю |
| Изменяемый обратный ход | В стандартной ситуации обратный ход мышц экзоскелета должен быть неограниченным для уменьшения энергетических затрат. Однако в аварийной ситуации экзоскелет должен фиксировать положение, например, для предотвращения падения |
| Диапазон частот управления | Диапазон частот управления должен быть максимальным |
На данный момент не существует искусственной мышцы, удовлетворяющей всем критериям для произвольной задачи. Прежде всего учитываются требования к мобильности и мощности используемых приводов. В зависимости от важности оптимизации конкретных параметров тип и характеристики привода должны выбираться отдельно (см. табл. 6). Стоит отметить, что в случае, когда механизм содержит более одной мышцы, их характеристики и типы также могут отличаться и должны оптимизироваться для каждого сустава.
Разработка носимого ассистивного механизма требует внимательного исследования физиологии костно-мышечной системы. Необходимость слежения за совпадением виртуальных шарниров вращения элементов носимого устройства с соответствующим суставом оператора накладывает множественные ограничения на кинематическую схему создаваемого аппарата. Использование сферического шарнира в качестве модели сустава правомерно только при небольших перемещениях. Для согласования центров вращения обычно применяется набор из двух или трех цилиндрических шарниров, при этом наборы из трех активных шарниров встречаются крайне редко. Жесткая конструкция, выполняющая заданную функцию, либо имеет большие габариты, либо требует использования крайне прочных и дорогостоящих материалов.
Это неизбежно приводит к необходимости применения мягких и упругих элементов [54–57]. И хотя этот подход сильно осложнен практической невозможностью моделирования кинематики и динамики движения из-за специализации большинства систем моделирования на твердотельных моделях, рост повсеместного использования мягких носимых роботов все больше побуждает исследователей к созданию новых и оптимизации существующих мягких приводов.
Список литературы
De Looze M.P., Bosch T., Krause F., Stadler K.S., O’Sullivan L.W. Exoskeletons for Industrial Application and Their Potential Effects on Physical Work Load // Ergonomics. 2016. V. 59 (5). P. 671–681.
Bortole M., Venkatakrishnan A., Zhu F. et al. The H2 Robotic Exoskeleton for Gait Rehabilitation After Stroke: Early Findings from a Clinical Study // J. NeuroEngineering and Rehabilitation. 2015. V. 12. № 54. https://jneuroengrehab.biomedcentral.com/articles/10.1186/s12984-015-0048-y
Lidka M. Comparison of DC Motors and Dielectric Elastomer Actuators for Wearable Wrist Exoskeletons // Electronic Thesis and Dissertation Repository. 2017. https://ir.lib.uwo.ca/etd/5032.
Gopura R.A.R.C., Kiguchi K. Mechanical Designs of Active Upper-limb Exoskeleton Robots State-of-the-art and Design Difficulties // Proc. IEEE Intern. Conf. on Rehabilitation Robotics. Kyoto, 2009. P. 178–187.
Veale A.J., Xie S.Q. Towards Compliant and Wearable Robotic Orthoses: A Review of Current and Emerging Actuator Technologies // Medical Engineering and Physics. 2016. V. 38 (4). P. 317–325.
Heo P., Gu G.M., Lee Sj., Rhee K., Kim J. Current Hand Exoskeleton Technologies for Rehabilitation and Assistive Engineering // Intern. J. Precision Engineering and Manufacturing. 2012. V. 13. P. 807–824.
Lee C., Kim M., Kim Y.J. et al. Soft Robot Review // Intern. J. Control, Automation and Systems. 2017. V. 15. P. 3–15.
Lo H.S., Xie S.Q. Exoskeleton Robots for Upper-limb Rehabilitation: State of the Art and Future Prospects // Medical Engineering and Physics. 2012. V. 34 (3). P. 261–268.
Gopura R.A.R.C., Kiguchi K., Bandara D.S.V. A Brief Review on Upper Extremity Robotic Exoskeleton Systems // Proc. 6th Intern. Conf. on Industrial and Information Systems. Kandy, 2011. P. 346–351.
Ebrahimi A. Stuttgart Exo-Jacket: An Exoskeleton for Industrial Upper Body Applications // Proc. 10th Intern. Conf. on Human System Interactions (HSI). Ulsan, 2017. P. 258–263.
Rus D., Tolley M.T. Design, Fabrication and Control of Soft Robots // Nature. 2015. V. 521. P. 467–475.
Motmans R., Debaets T., Chrispeels S. Effect of a Passive Exoskeleton on Muscle Activity and Posture During Order Picking // Advances in Intelligent Systems and Computing. 2019. V. 820. P. 338–346.
Hall M.L., Lobo M.A. Design and Development of the First Exoskeletal Garment to Enhance arm Mobility for Children with Movement Impairments // Assist. Technol. 2018. V. 30 (5). P. 251–258.
Центр авиакосмической медицины и технологий. Лечебный костюм “Регент” [электронный ресурс]. http://amc-si.com/tovari-i-uslugi/lechebniy-kostium-regent.
Daerden F., Lefeber D. Pneumatic Artificial Muscles: Actuators for Robotics and Automation // Europ. J. Mechanical and Environmental Engineering. 2002. V. 47. P. 11–21.
thesis Sangian D. New Types of McKibben Artificial Muscles // PhD Dissertation. University of Wollongong, 2016.
Chumichev M.A., Gribkov D.A., Pavlovsky V.E., Orlov I.A. A Model of the Pneumatic Artificial Muscle // Extreme Robotics. 2019. V. 1 (1). P. 453–461.
Официальный сайт компании FESTO. Пневмомускул MAS [электронный ресурс]. https://www.festo.com/cat/ru_ru/data/doc_ru/PDF/RU/MAS_RU.PDF
Belforte G., Eula G., Ivanov A., Raparelli T., Sirolli S. Presentation of Textile Pneumatic Muscle Prototypes Applied in an Upper Limb Active Suit Experimental Model // J. Textile Institute. 2017. V. 109 (6). P. 757–766.
Gobee S., Durairajah V., Mugilan G. Design and Development of Upper Limb Soft Exoskeleton for Rehabilitation // Proc. 2nd Intern. Conf. for Innovation in Biomedical Engineering and Life Sciences. ICIBEL 2017. IFMBE Proceedings. Singapore: Springer, 2018. P. 111–116.
Lee S., Kim J., Baker L. et al. Autonomous Multi-Joint Soft Exosuit with Augmentation-Power-Based Control Parameter Tuning Reduces Energy Cost of Loaded Walking // J. Neuroengineering and Rehabilitation. 2018. Vol. 15(1). № 66. https://jneuroengrehab.biomedcentral.com/articles/10.1186/s12984-018-0410-y
Asbeck A.T., De Rossi S.M.M., Galiana I., Ding Y., Walsh C.J. Stronger, Smarter, Softer: Next-Generation Wearable Robots // IEEE Robot. Autom. Mag. 2014. V. 21. P. 22–23.
Verrelst B., Van Ham R., Vanderborght B., Lefeber D., Daerden F., Van Damme M. Second Generation Pleated Pneumatic Artificial Muscle and Its Robotic Applications // Advanced Robotics. 2006. V. 20 (7). P. 783–805.
Villegas D., Van Damme M., Vanderborght B., Beyl P., Lefeber D. Third-Generation Pleated Pneumatic Artificial Muscles for Robotic Applications: Development and Comparison with Mckibben Muscle // Advanced Robotics. 2012. V. 26 (11–12). P. 1205–1227.
Kim H., Park H., Kim J., Cho K., Park Y. Design of Anisotropic Pneumatic Artificial Muscles and Their Applications to Soft Wearable Devices for Text Neck Symptoms // Proc. 39th Annual Intern. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC). Jeju, 2017. P. 4135–4138.
Polygerinos P., Lyne S., Wang Z. et al. Towards a Soft Pneumatic Glove for Hand Rehabilitation // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Tokyo, 2013. P. 1512–1517.
Park Y., Santos J., Galloway K.G., Goldfield E.C., Wood R.J. A Soft Wearable Robotic Device for Active Knee Motions Using Flat Pneumatic Artificial Muscles // Proc. IEEE Intern. Conf. on Robotics and Automation (ICRA). Hong Kong, 2014. P. 4805–4810.
Polygerinos P., Wang Z., Galloway K.C., Wood R.J., Walsh C.J. Soft Robotic Glove for Combined Assistance and At-Home Rehabilitation // Robotics and Autonomous Systems. 2015. V. 73. P. 135–143.
Махсидов В.В., Шиенок А.М., Иошин Д.В. Измерение деформации материала с помощью волоконных брэгговских решеток (обобщающая статья) // Завод. лаб. Диагностика материалов. 2016. Т. 82. № 11. С. 54–60.
Huang W. Shape Memory Alloys and Their Application to Actuators for Deployable Structures // PhD Dissertation. Engineering Department. Cambridge University, 1998.
Stirling L., Yu C.H., Miller J. et al. Applicability of Shape Memory Alloy Wire for an Active, Soft Orthotic // J. Materials Engineering and Performance. 2011. V. 20. P. 658–662.
Chenal T.P., Case J.C., Paik J., Kramer R.K. Variable Stiffness Fabrics with Embedded Shape Memory Materials for Wearable Applications // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Chicago, 2014. P. 2827–2831.
Yuen M., Cherian A., Case J.C., Seipel J., Kramer R.K. Conformable Actuation and Sensing with Robotic Fabric // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Chicago, 2014. P. 580–586.
Chiaradia D., Xiloyannis M., Antuvan C.W., Frisoli A., Masia L. Design and Embedded Control of a Soft Elbow Exosuit // Proc. IEEE Intern. Conf. on Soft Robotics (RoboSoft). Livorno, 2018. P. 565–571.
Hines L., Petersen K., Lum G.Z., Sitti M. Soft Actuators for Small-Scale Robotics // Advanced Materials (Deerfield Beach, Fla.). 2017. V. 29 (13). № 1603483. https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.201603483.
Marks D. Electric Motors for Machines and Mechanisms [электронный ресурс]. http://fab.cba.mit.edu/classes/S62.12/docs/motors.pdf.
Guizzo E., Goldstein H. The Rise of the Body Bots robotic exoskeletons // IEEE Spectrum. 2005. V. 42 (10). P. 50–56.
Stein J., Narendran K., McBean J., Krebs K., Hughes R. Electromyography-Controlled Exoskeletal Upper-Limb-Powered Orthosis for Exercise Training After Stroke // American J. Physical Medicine and Rehabilitation. 2007. V. 86 (4). P. 255–261.
Kim S.J., Kim Y., Lee H., Ghasemlou P., Kim J. Development of an MR-Compatible Hand Exoskeleton that is Capable of Providing Interactive Robotic Rehabilitation During fMRI Imaging // Medical and Biological Engineering and Computing. 2018. V. 56 (2). P. 261–272.
Yamamoto I., Inagawa N., Hachisuka K., Oda F., Nakanishi Y. Development of Compact Rehabilitation Robot for a Wrist Using Biological Signal // Proc. ICME Intern. Conf. on Complex Medical Engineering (CME). Kobe, 2012. P. 557–560.
Лавриненко В.В., Карташев И.А., Вишневский В.С. Пьезоэлектрические двигатели. М.: Энергия, 1980. 112 с.
Zoss A., Kazerooni H., Chu A. On the Mechanical Design of the Berkeley Lower Extremity Exoskeleton (BLEEX) // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Edmonton, 2005. P. 3465–3472.
Официальный сайт компании INNOPHYS. Muscle suit [электронный ресурс]. https://innophys.jp/product/standard/
Официальный сайт компании INNOPHYS. Muscle suit Edge [электронный ресурс]. https://innophys.jp/product/edge/
Официальный сайт компании INNOPHYS. Muscle suit Power [электронный ресурс]. https://innophys.jp/product/power/
Vanderborght B., Tsagarakis N.G., Van Ham R. et al. MACCEPA 2.0: Compliant Actuator Used for Energy Efficient Hopping Robot Chobino1D // Autonomous Robots. 2011. V. 31 (1). P. 55–65.
Carpino G., Accoto D., Sergi F., Tagliamonte N., Guglielmelli E. A Novel Compact Torsional Spring for Series Elastic Actuators for Assistive Wearable Robots // J. Mechanical Design. 2012. V. 134. P. 1–10.
Mathijssen G., Brackx B., Van Damme M., Lefeber D., Vanderborght B. Series-Parallel Elastic Actuation (SPEA) with Intermittent Mechanism for Reduced Motor Torque and Increased Efficiency // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Tokyo, 2013. P. 5841–5846.
Vanderborght B., Albu-Schaeffer A., Bicchi A. et al. Variable Impedance Actuators: A Review // Robotics and Autonomous Systems. 2013. V. 61 (12). P. 1601–1614.
Collins S., Wiggin M., Sawicki G. Reducing the Energy Cost of Human Walking Using an Unpowered Exoskeleton // Nature. 2015. V. 522. P. 212–215.
Butler N.R., Goodwin S.A., Perry J.C. Design Parameters and Torque Profile Modification of a Spring-Assisted Hand-Opening Exoskeleton Module // Proc. 15th IEEE Intern. Conf. on Rehabilitation Robotics (ICORR). London, 2017. P. 591–596.
Hasegawa Y., Muramatsu M. Wearable Lower-Limb Assistive Device for Physical Load Reduction of Caregiver on Transferring Support // Proc. IEEE/ASME Intern. Conf. on Advanced Intelligent Mechatronics. Wollongong, 2013. P. 1027–1032.
Hiesmair L. Compliant Exoskeleton // Thesis for the Attainment of the Academic Degree Bachelor of Science. Clarkson University. Automation Engineering, 2016.
Dollar A.M., Herr H. Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art // IEEE Transactions on Robotics. 2008. V. 24 (1). P. 144–158.
Kawamura S., Yamamoto T., Ishida D. et al. Development of Passive Elements with Variable Mechanical Impedance for Wearable Robots // Proc. IEEE Intern. Conf. on Robotics and Automation (Cat. No. 02CH37292). Washington, D.C., 2002. V. 1. P. 248–253.
Park Y., Chen B., Majidi C., Wood R.J., Nagpal R., Goldfield E. Active Modular Elastomer Sleeve for Soft Wearable Assistance Robots // Proc. IEEE/RSJ Intern. Conf. on Intelligent Robots and Systems. Algarve, 2012. P. 1595–1602.
Park Y., Ryu S.C., Black R.J., Chau K.K., Moslehi B., Cutkosky M.R. Exoskeletal Force-Sensing End-Effectors with Embedded Optical Fiber-Bragg-Grating Sensors // IEEE Transactions on Robotics. 2009. V. 25 (6). P. 1319–1331.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления