

Известия РАН. Теория и системы управления, 2022, № 3, стр. 165-176
О ПОДХОДАХ К РЕШЕНИЮ ЗАДАЧИ ОПРЕДЕЛЕНИЯ МОМЕНТОВ НАЧАЛА И ОКОНЧАНИЯ ДВИЖЕНИЯ ОБЪЕКТА ПРИ ПОМОЩИ ДАННЫХ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
А. А. Авиев a, А. В. Брагин b, *, И. А. Папуша b
a ООО “НПК “Электрооптика”
Москва, Россия
b МГУ им. М.В. Ломоносова
Москва, Россия
* E-mail: avb9676@yandex.ru
Поступила в редакцию 24.09.2021
После доработки 27.10.2021
Принята к публикации 29.11.2021
- EDN: QOVCMF
- DOI: 10.31857/S0002338822020032
Аннотация
Рассматривается задача автономного определения при помощи первичных и/или вторичных данных бесплатформенной инерциальной навигационной системы двух событий: начала движения объекта и его остановки, и, как следствие, определения интервалов неподвижности объекта. Задача имеет смысл для объектов аэродромного базирования, когда иные датчики движения отсутствуют, а также когда при рулежке объекта по полосам аэродрома он может останавливаться на неопределенное время. Детектирование интервалов неподвижности позволяет применить коррекцию бесплатформенной инерциальной навигационной системы по нулевой скорости или ZUPT-коррекцию (Zero velocity UPdaTe), что важно для последующего функционирования бесплатформенной инерциальной навигационной системы.
Описаны два подхода к построению алгоритмов детектирования старта и остановки объекта. Первый основан на использовании первичной информации бесплатформенной инерциальной навигационной системы – показаний инерциальных датчиков (акселерометров, датчиков угловой скорости), второй – на применении вторичной информации (позиционных, скоростных, угловых данных автономного инерциального счисления). Оба подхода базируются на эвристических критериях, полученных опытным путем при обработке данных бесплатформенных инерциальных навигационных систем и с учетом специфики задачи.
Приводятся результаты тестирования разработанных алгоритмов на экспериментальных данных для бесплатформенных инерциальных навигационных систем навигационного класса точности.
Введение. Рассматривается задача автономного определения при помощи первичных и/или вторичных данных бесплатформенной инерциальной навигационной системы (БИНС), установленной на объекте, двух событий: начала движения объекта и его остановки. Задача имеет смысл для объектов аэродромного базирования, когда иные датчики движения отсутствуют, а также когда при рулежке объекта по полосам аэродрома он может останавливаться на неопределенноe время. Детектирование интервалов неподвижности позволяет применить коррекцию БИНС по нулевой скорости или ZUPT-коррекцию (zero velocity UPdaTe), что важно для последующего функционирования БИНС [1, 2].
Предполагается, что для решения задачи доступны только измерения инерциальных датчиков – акселерометров, датчиков угловой скорости, и/или выходная позиционная, скоростная, угловая информация БИНС. Требуется в текущем времени, по возможности с минимальным запаздыванием, сформировать в вычислителе БИНС бинарный признак (флаг) движения/остановки объекта. Далее соответствующие алгоритмические решения задачи для краткости будем называть датчиком движения (и остановки).
В литературе встречается много подходов к построению датчика движения для целей пешеходной навигации [3]. Исследуются как традиционные варианты, основанные на выборе пороговых значений, с которыми сравниваются различные тестовые статистики [4–6], так и подходы, в которых используются методы машинного обучения [7–9]. Последние не рассматривались нами, поскольку требуют значительного объема вычислений и наличия обучающей выборки. Способ, описанный в [6], был опробован в условиях рассматриваемой задачи. Однако предложенные в [6] алгоритмические решения оказались неработоспособными для БИНС навигационного класса точности.
Предполагается, что носителем БИНС является летательный аппарат (ЛА). Корпус ЛА в процессе предполетной подготовки подвержен воздействию различных возмущающих факторов, не связанных с началом движения: ветровые возмущения, регламентная работа обслуживающего персонала, запуск и работа двигателей. Эти возмущения могут составить заметную часть полезного сигнала инерциальных датчиков БИНС. Естественно потребовать, чтобы датчик движения не срабатывал при воздействии этих возмущений. Выделим еще одну особенность построения датчика движения при определении именно момента остановки объекта. Особенность заключается в том, что к моменту остановки накопленные позиционные и скоростные ошибки инерциального счисления могут быть значимыми по уровню. Непосредственная проверка, например, условия близости к нулю значений компонент вектора скорости здесь не проходит в качестве индикаторной характеристики остановки.
Ниже предложены два варианта применения информации БИНС в алгоритмах датчика движения. Первый предполагает использование первичной информации БИНС (показаний акселерометров и датчиков угловой скорости (ДУС)), а второй – вторичной информации (навигационного решения БИНС). Оба алгоритма хорошо показали себя при тестировании на реальных данных, в том числе при объединении определяемых ими логических признаков движения или остановки.
1. Постановка задачи. Для БИНС авиационного применения и навигационного класса точности при помощи ее первичной и/или вторичной информации требуется в реальном времени с приемлемой задержкой сформировать бинарный признак движения (1 – наблюдается движение объекта, 0 – остановка).
Под БИНС навигационного класса точности далее будем понимать систему, позволяющую осуществлять ее автономную начальную выставку на неподвижном основании без привлечения информации о курсе.
В работе при отработке алгоритмов использовались экспериментальные данные БИНС навигационного класса точности, построенной на лазерных гироскопах и кварцевых акселерометрах.
Априорные технические условия решения задачи.
Объект по условиям активации навигационного режима БИНС неподвижен в течение первых нескольких минут. Это делается для реализации режима начальной выставки БИНС на неподвижном основании, когда определяются начальные значения параметров ориентации приборного трехгранника БИНС – углы истинного курса, крена, тангажа.
Предполагается, что доминантным направлением движения объекта при рулежке по аэродрому является направление вдоль его продольной оси.
Приемлемой задержкой формирования признака движения служит задержка в пределах первых единиц секунд.
Датчик движения не должен быть чувствителен к возмущениям, не связанным с началом движения: воздействие ветра; толчки, вызванные работой обслуживающего персонала объекта; включение двигателей и т.п.
2. Существующие подходы. Задача детектирования интервалов неподвижности объекта востребована в ряде специфических приложений. Однако в российских доступных публикациях, известных авторам, данная тема не обсуждалась (за исключением уже упомянутых работ по пешеходной навигации).
Опишем в общих чертах один из известных нам подходов к решению подобной задачи. Он заключается в анализе средней путевой скорости и ее приращения на секундном интервале, а также приращений углов ориентации на десятисекундном интервале. При непревышении указанными параметрами подобранных пороговых значений считается, что объект остановился.
В пешеходной навигации [4–9] датчик движения используется для обнаружения фаз опоры стопы при ходьбе. В остальных фазах шага движение неравномерно и сопровождается большими возмущениями (особенно при ударе о землю) в показаниях акселерометров и ДУС. Поэтому для обнаружения фазы опоры оказалось достаточным фиксировать значительное уменьшение уровня показаний датчиков на небольшом интервале. Еще одной особенностью датчиков движения в пешеходной навигации является их приспособленность к работе с данными низкоточных инерциальных датчиков. Это также ограничивает возможности адаптации разработанных в [4–9] методов к рассматриваемой задаче.
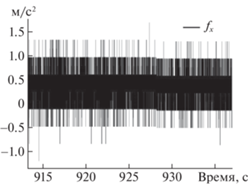
3. Использование первичной информации БИНС. В условиях достаточно высокого уровня шумовых составляющих измерений инерциальных датчиков естественно применять их предварительную фильтрацию, что позволяет существенно уменьшить амплитуду этой составляющей. Последнее дает возможность получить качественные числовые характеристики, соответствующие интервалам стоянки, движения объекта и возмущающих воздействий. Для примера приведем графики на рис. 1, 2.
Рис. 1.
Фрагмент записи “сырых” показаний продольного акселерометра неподвижного объекта при некотором возмущающем воздействии
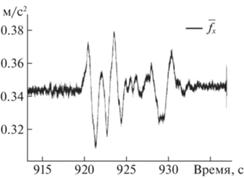
Здесь следует отметить, что выбор алгоритма фильтрации не является однозначным. Последовательно поступающие входные данные (“сырые” измерения инерциальных датчиков и/или навигационных параметров счисления) для задач реального времени следует обрабатывать в скользящем окне [10]. В общем случае алгоритм фильтрации определяется двумя характеристиками: весовой функцией окна или ядром и шириной окна. Первоначальной идеей было применение окна Ханна [10], поскольку оно по сравнению c прямоугольным окном при одинаковой их ширине дает на выходе более гладкую кривую (рис. 3, 4). Однако рекуррентная реализация окна Ханна в реальном времени в бортовом вычислителе БИНС является затруднительной ввиду большого числа операций на частоте решения навигационной задачи (400 Гц в рассматриваемом случае). Поэтому в предлагаемом алгоритме было решено обрабатывать данные прямоугольным окном, которое легко реализуется с помощью рекуррентного алгоритма.
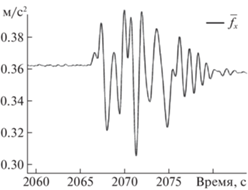
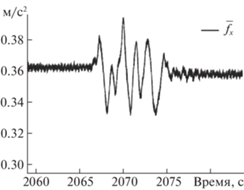
Рис. 4.
Показания акселерометра при возмущающем воздействии, обработанные прямоугольным окном шириной 1 с
Достаточно очевидно, что выбор ширины окна является компромиссом между возможностью ошибочно принять внешнее возмущение за действительное начало движения и минимизацией времени реакции на начало движения. Чем больше ширина окна, тем лучше “сглажены” внешние воздействия, не связанные с движением, но в то же время увеличивается время запаздывания принятия решения о событии: объект движется или неподвижен. В разработанных алгоритмах на основе обработки экспериментальных записей БИНС исследуемого объекта ширина окна осреднения была выбрана равной 1 с.
Введем обозначения: $\left\{ {{{f}_{x}}({{t}_{n}}),{{f}_{y}}({{t}_{n}}),{{f}_{z}}({{t}_{n}}),{{\omega }_{x}}({{t}_{n}}),{{\omega }_{y}}({{t}_{n}}),{{\omega }_{z}}({{t}_{n}})} \right\}$ – показания блока инерциальных датчиков в текущий момент tn, измеренные в приборной системе координат $Mxyz$, связанной с БИНС. Точка M – приведенный центр блока акселерометров. Оси приборной системы координат с точностью до погрешности установки совпадают с продольной, вертикальной и направленной вдоль “правого крыла” осями объекта. Будем следовать терминологии, принятой в [2], которая в свою очередь преемственна терминологии классиков инерциальной навигации – А.Ю. Ишлинского [11], В.Д. Андреева [12]: ${{f}_{x}},{{f}_{y}},{{f}_{z}}$ – проекции внешней удельной силы, действующей на приведенную чувствительную массу блока акселерометров, измеряемой акселерометрами БИНС; $\{ {{\omega }_{x}},{{\omega }_{y}},{{\omega }_{z}}\} $ – соответствующие проекции абсолютной угловой скорости объекта (приборного трехгранника), измеряемые ДУС.
Средние значения измеряемых величин на секундном интервале $[{{t}_{{n - N}}},{{t}_{n}}],n \geqslant N$, вычисляются стандартным способом:
(3.1)
$\begin{gathered} {{{\bar {\omega }}}_{m}}({{t}_{n}}) = \frac{1}{{N + 1}}\sum\limits_{k = n - N}^n {{{\omega }_{m}}({{t}_{k}}),\quad m = x,y,z,} \\ {{{\bar {f}}}_{l}}({{t}_{n}}) = \frac{1}{{N + 1}}\sum\limits_{k = n - N}^n {{{f}_{l}}({{t}_{k}}),} \quad l = x,z, \\ \end{gathered} $Далее введем дополнительные индикаторные параметры: ${{\bar {f}}^{2}}({{t}_{n}}) = \bar {f}_{x}^{2}({{t}_{n}}) + \bar {f}_{z}^{2}({{t}_{n}})$ – квадрат модуля горизонтальной составляющей удельной силы, вычисленный по осредненным значениям из (3.1); ${{\bar {\omega }}^{2}}({{t}_{n}}) = \bar {\omega }_{x}^{2}({{t}_{n}}) + \bar {\omega }_{y}^{2}({{t}_{n}}) + \bar {\omega }_{z}^{2}({{t}_{n}})$ – квадрат абсолютной угловой скорости, найденный по осредненным показаниям ДУС из (3.1).
Рассмотрим временной интервал $[{{t}_{0}},{{t}_{n}}]$, где t0 – начальное время решения задачи. Определим величины
(3.2)
${{\bar {F}}_{x}}({{t}_{n}}) = \frac{1}{{n + 1}}\sum\limits_{k = 0}^n {{{{\bar {f}}}_{x}}({{t}_{k}}),\quad } {{\bar {F}}_{z}}({{t}_{n}}) = \frac{1}{{n + 1}}\sum\limits_{k = 0}^n {{{{\bar {f}}}_{z}}({{t}_{k}}).} $Здесь ${{\bar {F}}_{x}}({{t}_{n}}),{{\bar {F}}_{z}}({{t}_{n}})$ – средние на интервале $[{{t}_{0}},{{t}_{n}}]$ значения “горизонтальных” компонент ${{\bar {f}}_{x}},{{\bar {f}}_{z}}$ удельной силы, вычисленные при помощи осредненных измерений акселерометров в моменты времени ${{t}_{0}},{{t}_{1}}, \ldots ,{{t}_{n}}$; ${{\bar {F}}^{2}}({{t}_{n}}) = {{\bar {F}}_{x}}^{2}({{t}_{n}}) + {{\bar {F}}_{z}}^{2}({{t}_{n}})$ – среднее на интервале $[{{t}_{0}},{{t}_{n}}]$ значение квадрата модуля горизонтальной составляющей удельной силы.
В предложенном алгоритме критерий (логическое правило) для формирования признака начала движения основан на данных акселерометров, поскольку было замечено, что их реакция на движение объекта менее инерционна и опережает реакцию ДУС. Соответствующая иллюстрация сказанного отражена на рис. 5, 6.
Рис. 5.
Поведение ${{\bar {f}}_{x}},$ м/с2 (черный) и ${{\bar {\omega }}_{y}},$ град/с (красный) на участке начала движения
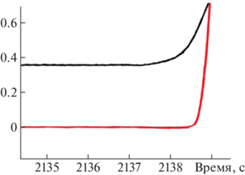
Рис. 6.
Поведение ${{\bar {f}}^{2}}$ (черный) и ${{\bar {\omega }}^{2}}$ (красный) на участке начала движения
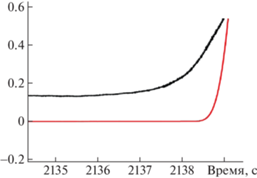
Обработка экспериментальных данных показала, что начало движения характеризуется резким вертикальным скачком профиля кривой, построенной по сглаженным показаниям акселерометров, и возросшей на порядки амплитудой этих сигналов. Формализация наблюдаемых визуально из графиков индикаторных параметров позволила предложить эвристические критерии, при помощи которых предлагается определять момент начала движения объекта, а именно контролировать следующие параметры:
заметные превышения (скачки) сглаженных показаний продольного акселерометра ${{\bar {f}}_{x}}$ относительно среднего значения ${{\bar {F}}_{x}}$ (рис. 7):
(3.3)
$\left| {{{{\bar {f}}}_{x}}({{t}_{n}}) - {{{\bar {F}}}_{x}}({{t}_{n}})} \right| > \delta f_{x}^{{start}},$(3.4)
$\left| {\frac{1}{L}\sum\limits_{k = n - L}^n {{{{({{{\bar {f}}}^{2}}({{t}_{k}}) - {{{\bar {F}}}^{2}})}}^{2}}} } \right| > \delta {{f}^{2}}^{{start}}.$Рис. 7.
Скачки показаний продольного акселерометра ${{\bar {f}}_{x}}$, м/с2 (черный) относительно среднего значения ${{\bar {F}}_{x}}$, м/с2 (красный)
Параметр L, задающий ширину интервала, выбран равным L = N/2, что соответствует ширине окна 0.5 с. Начало движения определяется по одновременному превышению контролируемыми величинами пороговых значений $\delta {{f}_{x}}^{{start}},\delta {{f}^{{2\,start}}}$ в неравенствах (3.3), (3.4). На рис. 7, 8 приведены соответствующие иллюстративные графики.
Для определения момента остановки объекта предложено рассматривать следующие параметры:
меру отклонения квадрата модуля сглаженной абсолютной угловой скорости ${{\bar {\omega }}^{2}}({{t}_{k}})$ от квадрата модуля угловой скорости u вращения Земли на интервале $[{{t}_{{n - L}}},{{t}_{n}}]$:
(3.5)
$\left| {\frac{1}{L}\sum\limits_{k = n - L}^n {{{{({{{\bar {\omega }}}^{2}}({{t}_{k}}) - {{u}^{2}})}}^{2}}} } \right| < \delta {{\omega }^{{2\,stop}}},$(3.6)
$\left| {\frac{1}{L}\sum\limits_{k = n - L}^n {{{{({{{\bar {f}}}^{2}}({{t}_{k}}) - {{{\bar {F}}}^{2}})}}^{2}}} } \right| < \delta {{f}^{{2\,stop}}}.$Поскольку предполагается, что объект находится в движении, в формуле (3.6) среднее значение ${{\bar {F}}^{2}}$ определяется не на интервале $[{{t}_{0}},{{t}_{n}}]$, как показано в формуле (3.2), а в скользящем секундном окне $\left[ {{{t}_{{n - N}}},{{t}_{n}}} \right]$.
Признак окончания движения формируется при одновременном непревышении контролируемыми величинами пороговых значений $\delta {{f}^{{2\,stop}}},\delta {{\omega }^{{2\,stop}}}$ в соотношениях (3.5), (3.6). Пороговые значения $\delta {{f}_{x}}^{{start}},\delta {{f}^{{2\,start}}},\delta {{f}^{{2\,stop}}},\delta {{\omega }^{{2\,stop}}}$ подобраны экспериментально и протестированы на всех представленных реализациях.
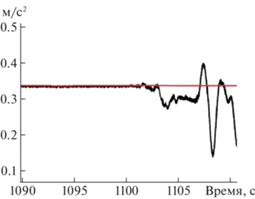
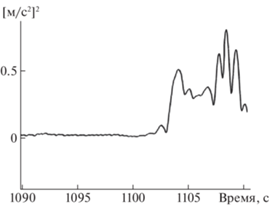
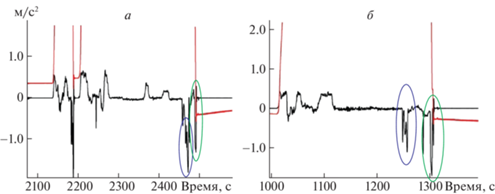
Отметим, что на наш взгляд критерий, основанный на анализе отклонения квадрата угловой скорости, обладает несколькими преимуществами. Для объекта, неподвижного относительно Земли, с высокой точностью известно эталонное значение этого параметра – квадрат модуля угловой скорости вращения Земли. Отклонение имеет различный характер поведения на остановках, при внешнем воздействии на систему и на интервалах движения (рис. 9). На участках равномерного поступательного движения объекта с небольшой по величине продольной относительной скоростью (рис. 10) данный сигнал является наиболее контрастным показателем для формирования признака движения.
Рис. 9.
Пример отклонения квадрата угловой скорости объекта от квадрата угловой скорости вращения Земли $\sigma ({{\bar {\omega }}^{2}})$ на участках остановки при возмущающем воздействии и при движении
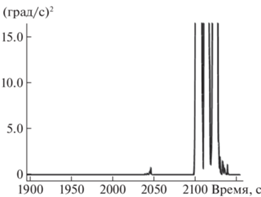
Рис. 10.
Пример отклонения квадрата угловой скорости объекта от квадрата угловой скорости вращения Земли $\sigma ({{\bar {\omega }}^{2}})$ при движении объекта (фрагмент рис. 9 в увеличенном масштабе)
4. Применение вторичной информации. Датчик движения, использующий параметры навигационного решения БИНС, строится в зависимости от инерционно-массовых свойств объекта, которые сказываются на величинах его характерных линейных и угловых движений. Представленный ниже алгоритм обусловлен предположением о том, что доминантным направлением движения объекта является направление вдоль его продольной оси.
Использовались следующие параметры навигационного решения: ${{V}_{N}},{{V}_{E}}$ – северная и восточная составляющие относительной скорости в географической системе координат; $\psi $ – истинный курс. По этим параметрам вычислялась продольная горизонтальная скорость ${{V}_{x}} = {{V}_{E}}\sin \psi $ + VNcosψ, которая и была исходным сигналом для формирования признака движения.
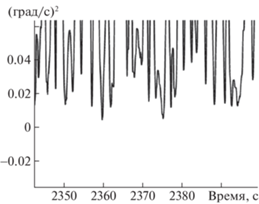
Для определения моментов начала движения и остановки анализ текущего значения продольной скорости как отклонения от нулевой скорости не дает нужного результата, поскольку накопленные скоростные ошибки инерциального счисления потенциально могут быть значительными по уровню (рис. 11). Поэтому воспользуемся дополнительными характеристиками, которые, как показал опыт обработки экспериментальных данных, дают более точное представление о том, движется объект или нет.
На рис. 11, а видно, что после участка с движением (1500–1700 с) объект стоит, но скорость значительно отличается от нуля. Первая характеристика – оценка производной продольной скорости ${{a}_{x}}$, которую мы для краткости будем называть продольным ускорением. Оценка продольного ускорения получена путем предложенного нами специфического дифференцирования продольной скорости в скользящем окне.
Определим скользящее окно на интервале $[{{t}_{{n - N}}},{{t}_{n}}]$. Здесь ${{t}_{n}}$ – текущий момент времени, $N$ – количество точек в окне. Для простоты будем считать $N$ четным. Каждому моменту времени соответствует значение продольной скорости ${{V}_{x}}({{t}_{j}})$. Обозначим оконную производную ${{V}_{x}}$ через ax. Будем относить ${{a}_{x}}$ к середине скользящего окна:
(4.1)
${{\left. {{{a}_{x}}} \right|}_{{t* = {{t}_{n}} - \frac{T}{2}}}} = \sum\limits_{j = n - N}^n {{{V}_{x}}({{t}_{j}})} K({{t}_{j}}),\quad K({{t}_{j}}) = \left\{ \begin{gathered} - \frac{4}{{TN}},\quad {{t}_{j}} < {{t}_{n}} - \frac{T}{2}, \hfill \\ \frac{4}{{TN}},\quad {{t}_{j}} > {{t}_{n}} - \frac{T}{2}. \hfill \\ \end{gathered} \right.$Здесь T – ширина окна. Приведенная формула означает, что используется разделенная разность средних значений обрабатываемого параметра в левой и правой частях окна. Оконное дифференцирование было выбрано потому, что непосредственное дифференцирование на частоте поступления данных (400 Гц) давало очень “шумный” сигнал (рис. 12).
Рис. 12.
Черная линия $\left( {{{V}_{x}},{\text{м/с}}} \right)$ – продольная скорость объекта, красная линия $({{a}_{x}}$, м/с2): а – производная продольной скорости, взятая с частотой 400 Гц, б – результат оконного дифференцирования продольной скорости в секундном скользящем окне по формуле (4.1)
Структура ядра дифференцирования $K({{t}_{j}})$ была выбрана простой для уменьшения вычислительной сложности алгоритма.
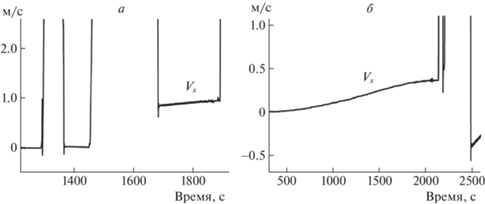
При визуальном анализе графиков ${{a}_{x}}$ (см., например, рис. 13) замечено, что заметный пик амплитуды может означать либо внешнее воздействие, либо начало движения. На рис. 13, а видно, что пик, выделенный голубым овалом, не означает остановки, но по амплитуде сравним с пиком, соответствующим моменту остановки (выделен зеленым овалом). На 13, б изображен тот же эффект для другой записи. Эти случаи отделялись друг от друга посредством экспериментального выбора пороговых значений. Оказалось, что значения ускорений при старте больше, чем при возмущениях, не связанных с началом движения.
Рис. 13.
Черная линия $({{a}_{x}}$, м/с2) – продольное ускорение. Красная линия $\left( {{{V}_{x}},{\text{м/с}}} \right)$ – продольная скорость; а и б – разные записи
Однако для определения момента остановки величина продольного ускорения ${{a}_{x}}$ оказалась неинформативной. Как можно видеть из рис. 13, пики сигнала ${{a}_{x}}$ при маневрах и при остановке сравнимы по амплитуде. Поэтому критерий определения остановки основан на сравнительном анализе других характеристик.
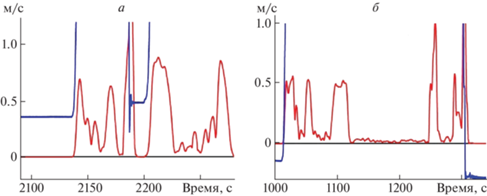
Вторая характеристика – среднеквадратическое отклонение (СКО) $\sigma ({{V}_{x}})$ продольной скорости. На рис. 14 видно, что моментам движения соответствует контрастное увеличение значений этого сигнала. На рис. 14, а и б изображены разные записи. Указанная характеристика также вычислялась в скользящем окне по следующей формуле:
(4.2)
$\sigma ({{V}_{x}}) = \sqrt {\frac{{\sum\limits_{j = n - N + 1}^n {{{V}_{x}}{{{\left( {{{t}_{j}}} \right)}}^{2}} - N} {{{\bar {V}}}_{x}}}}{{N - 1}}} ,\quad {{\bar {V}}_{x}} = \frac{1}{N}\sum\limits_{j = n - N + 1}^n {{{V}_{x}}\left( {{{t}_{j}}} \right)} .$Рис. 14.
Синяя линия $({{V}_{x}})$ – продольная скорость, красная линия $\left( {\sigma \left( {{{V}_{x}}} \right)} \right)$ — СКО продольной скорости, черная линия $(\delta {{\sigma }^{{start}}})$ – порог, который СКО переходит только во время движения
Для формирования признака движения используются обе характеристики из выражений (4.1), (4.2). При определении момента старта текущее значение продольного ускорения сравнивается с пороговым значением $\delta a_{x}^{{start}}$, а СКО продольной скорости – с пороговым значением $\delta {{\sigma }^{{start}}}$. В случае одновременного превышения величинами из (4.1), (4.2) пороговых значений считается, что объект начал движение. Если при движении объекта значения величин ax, $\sigma ({{V}_{x}})$ одновременно становятся меньше порогов $\delta a_{x}^{{stop}}$, $\delta {{\sigma }^{{stop}}}$, считается, что объект остановился.
Принцип работы датчика такой же, как у датчика, работающего по первичным данным. Изначально флаг движения имеет значение 0. По критерию начала движения определяется момент старта, флаг движения принимает значение 1. По критерию окончания движения определяется момент остановки, флаг полагается равным 0.
Особенностью алгоритмической реализации описанного подхода является обработка исходного сигнала, т.е. продольной скорости ${{V}_{x}}$, в скользящих окнах. Следствием использования оконного сглаживания стало запаздывание в получении текущего значения сигнала ax. Максимальное значение допустимого запаздывания определяется желаемым быстродействием датчика движения. В приведенном алгоритме ширина окна осреднения ax равна 1 с, а ширина окна, в котором вычисляется СКО, равна 5 с.
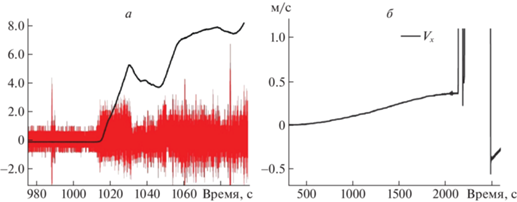
5. Проверка алгоритма при помощи экспериментальных данных. Алгоритмы тестировались на телеметрических записях БИНС, установленных на ЛА. Настройка параметров проводилась на серии из девяти экспериментов, так чтобы оба алгоритма не выдавали ложных срабатываний. Под ложными срабатываниями понимается либо определение старта при фактической неподвижности объекта, либо определение остановки при фактическом движении объекта. Среднее время реакции детектора при установке флага движения составило приблизительно 0.7 с, флага остановки – 5 с. На рис. 15 представлены графики, иллюстрирующие работу детекторов, основанных на обработке первичных и вторичных данных. На рис. 15, а изображен фрагмент записи, а на рис. 15, б – крупным планом участок с двумя остановками, на котором видны различия во времени срабатывания.
Рис. 15.
Результаты работы детектора, использующего первичную информацию БИНС (черная линия) и вторичную информацию БИНС (красная линия); продольная скорость $({{V}_{x}})$ – синяя линия
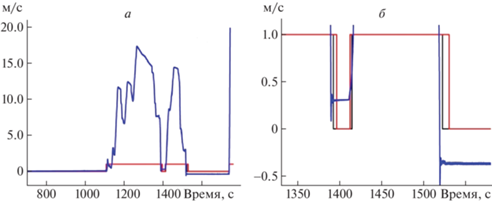
Время реакции двух вариантов датчика отличается незначительно. В частности, различия в определении старта составляют десятые доли секунды. Различия в определении остановки больше – детектор, работающий с первичными данными БИНС, может срабатывать на 5 с быстрее. Это связано с тем, что окно для определения СКО продольной скорости шире, чем окна, используемые в детекторе по первичной информации.
Подбор пороговых значений критериев, а также размеров окон осреднения остается самой неформализованной частью алгоритма. Пороги выбирались исходя из необходимости разделить возмущения, связанные и не связанные с началом движения. Размеры окон определялись уровнем шумов выходных данных БИНС и допустимым временем реакции датчика движения. Очевидно, что выбранные значения параметров являются универсальными только для конкретного объекта. Так, для ЛА нужно исключать срабатывание детектора движения при запуске двигателей. Для объектов другого типа возможно наличие возмущений иной природы, что потребует отдельной настройки алгоритма. Таким образом, задача автоматизации выбора параметров алгоритма при разработке датчика движения не рассматривалась.
Заключение. Предложены подходы к построению алгоритмов датчика движения объекта. Во многом построенные алгоритмы носят эвристический характер. Опыт обработки экспериментальных данных показал, что моменты движения и неподвижности объекта при помощи первичной и/или вторичной информации БИНС определяются достаточно надежно. Предложено два варианта алгоритма, предполагающих использование первичных или вторичных данных БИНС. Показано, что оба варианта могут применяться как совместно, так и по отдельности. Формирование признаков старта и остановки объекта основано на технике обработки информации в скользящих окнах.
При использовании первичных данных обрабатывались показания акселерометров, направленных вдоль продольной оси и правого крыла, а также модуль показаний ДУС. Данные акселерометров оказались более информативны для определения старта, а модуль показаний ДУС – для определения остановки. При анализе вторичных данных БИНС обрабатывалась продольная скорость объекта. В скользящих окнах вычислялись продольное ускорение, а также СКО продольной скорости. Первый сигнал оказался более информативен для детектирования старта, второй – остановки.
Для повышения надежности старт и остановка определялись из совместного анализа описанных сигналов. Работа датчика проверена на экспериментальных данных.
Вопросы строгого математического обоснования предлагаемых решений в датчике движения не рассматривались, полагая, что это составит предмет отдельного исследования.
Список литературы
Зорина О.А., Измайлов Е.А., Кухтевич С.Е. и др. О расширении возможностей интеграции инерциальных и спутниковых навигационных систем в авиационных приложениях // Гироскопия и навигация. 2017. Т. 25. № 2 (97). С. 18–34.
Вавилова Н.Б., Голован А.А., Парусников Н.А. Математические основы навигационных систем. Математические модели инерциальной навигации. М.: Изд-во МГУ, 2020. 162 с.
Ван Ю., Цзяо Ч.-Ш., Шкель А.М. Пешеходная инерциальная навигация с коррекцией по нулевой скорости и комплексированием датчиков // Гироскопия и навигация. 2021. Т. 29. № 1 (112). С. 3–31. https://doi.org/10.17285/0869-7035.0054
Wahlstrom J., Skog I., Gustafsson F., Markham A., Trigoni N. Zero-Velocity Detection – A Bayesian Approach to Adaptive Thresholding // IEEE Sensors Letters. 2019. V. 3. № 6. P. 1–4.
Krach B., Robertson P. Integration of Foot-mounted Inertial Sensors Into a Bayesian Location Estimation Framework // IEEE Workshop on Positioning, Navigation and Communication. Hannover, Germany, 2008.
Skog I., Handel P., Nilsson J.-O. et al. Zero-velocity Detection – an Algorithm Evaluation // IEEE Trans. Bio-Med. Eng. 2010. V. 57. № 11. P. 2657–2666.
Wagstaff B., Peretroukhin V., Kelly J. Improving Foot-mounted Inertial Navigation Through Real-time Motion Classification // IEEE Intern. Conf. on Indoor Positioning and Indoor Navigation (IPIN). Sapporo, Japan, 2017.
Кроненветт Н., Руппельт Я., Троммер Г.Ф. Прецизионное позиционирование пешехода в помещении на основе контроля за стадиями его походки // Гироскопия и навигация. 2017. № 1 (96). С. 33–48.
Zhang R., Yang H., Hoflinger F., Reindl L.M. Adaptive Zero-velocity Update Based on Velocity Classification for Pedestrian Tracking // IEEE Sensors J. 2017. V. 17. № 7. P. 2137–2145.
Hamming R.W. Digital Filters. Prentice-Hall, inc., Englewood Cliffs, New Jersey, 1977. 224 p.
Ишлинский А.Ю. Механика относительного движения и силы инерции. М.: Наука, 1981. 191 с.
Андреев В.Д. Теория инерциальной навигации. Автономные системы. М.: Наука, 1966. 580 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления