

Известия РАН. Теория и системы управления, 2022, № 3, стр. 21-30
ИДЕНТИФИКАЦИЯ ДЕФЕКТОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ НА ОСНОВЕ СКОЛЬЗЯЩИХ НАБЛЮДАТЕЛЕЙ С ОСЛАБЛЕННЫМИ УСЛОВИЯМИ СУЩЕСТВОВАНИЯ
А. Н. Жирабок a, *, А. В. Зуев b, В. Ф. Филаретов c, А. Е. Шумский a
a Дальневосточный федеральный ун-т,
Владивосток, Россия
b Институт проблем морских технологий ДВО РАН
Владивосток, Россия
c Институт автоматики и процессов управления ДВО РАН
Владивосток, Россия
* E-mail: zhirabok@mail.ru
Поступила в редакцию 26.01.2021
После доработки 13.12.2021
Принята к публикации 31.01.2022
- EDN: BBJBQP
- DOI: 10.31857/S0002338822030167
Аннотация
Рассматривается задача идентификации дефектов в системах, описываемых нелинейными динамическими уравнениями, в присутствии возмущений. Для решения используются наблюдатели, работающие в скользящем режиме. Предлагаемый подход базируется на идее построения редуцированной (имеющей меньшую размерность) модели исходной системы, обладающей избирательной чувствительностью по отношению к дефектам и возмущению. Основной целью введения такой модели является ослабление условий существования скользящих наблюдателей по сравнению с известными работами, в частности, условий минимальной фазовости и детектируемости системы, а также условия согласования. Эффект ослабления достигается за счет того, что модель пониженной размерности может не иметь тех свойств, которые присутствуют в исходной системе и препятствуют возможности построения для нее скользящего наблюдателя. Изложенная теория иллюстрируется примером.
Введение. Одной из задач функционального диагностирования является задача идентификация дефектов [1]. В последние годы для ее реализации активно применяется подход, основанный на наблюдателях, которые работают в скользящем режиме и используют особенности этого режима [2]. Далее наблюдатель со скользящим режимом работы будем называть скользящим наблюдателем.
Настоящая публикация является логическим продолжением статей [3, 4], посвященных разработке методов построения скользящих наблюдателей для решения задачи идентификации дефектов. Указанные наблюдатели описываются дифференциальным уравнением с разрывной правой частью и обеспечивают возникновение в системе скользящего режима при соблюдении определенных условий.
Скользящие наблюдатели применяются для решения задачи идентификации дефектов в линейных [3, 5–7] и нелинейных [4, 8, 9] системах, для обеспечения отказоустойчивого управления [10], в ряде практических приложений [11–13]. Во всех таких работах на исходную систему накладывается ряд ограничений, в частности, требуется, чтобы выполнялось так называемое условие согласования и система была минимально фазовой.
Для ослабления условия согласования были предложены методы, использующие скользящие наблюдатели высокого порядка [14, 15] и каскадное соединение наблюдателей [16], но при этом система должна быть минимально фазовой. В [17] последнее условие ослаблено ценой того, что в выражение для оценки дефекта входит производная величины дефекта, в [18] для этого вводится предположение об ограниченности ошибки оценивания. В [19, 20] требование минимальной фазовости системы ослаблено до условия детектируемости.
Отметим, что в известных работах скользящие наблюдатели строятся на основе исходной системы и, следовательно, имеют размерность, совпадающую с размерностью этой системы. В настоящей статье предложен метод, позволяющий осуществить дальнейшее ослабление указанных условий. В его основе лежит идея использования редуцированной (имеющей меньшую размерность) модели исходной системы, что и позволяет ослабить эти условия. Кроме того, это дает возможность уменьшить размерность скользящих наблюдателей.
1. Построение редуцированной модели. Рассмотрим стационарную систему, описанную нелинейным уравнением состояния и линейной функцией выхода:
(1.1)
$\begin{gathered} \dot {x}(t) = Fx(t) + Gu(t) + C\Psi (x(t),u(t)) + Dd(t) + L\rho (t), \\ y(t) = Hx(t). \\ \end{gathered} $Здесь x(t) ∈ Rn, u(t) ∈ Rm, y(t) ∈ Rl – векторы состояния, управления и выхода; F ∈ Rn ×n, G ∈ ∈ Rn × m, D ∈ Rn ×q, L ∈ Rn ×p и H ∈ Rl ×n – известные постоянные матрицы; d(t) ∈ R – функция, описывающая дефекты: при их отсутствии d(t) = 0, при появлении дефекта d(t) становится неизвестной функцией времени; ρ(t) ∈ Rp – неизвестная функция времени, описывающая действующие на систему возмущения, Ψ(x, u) – нелинейная составляющая:
Для решения задачи идентификации функции d(t) в [8] предполагается, что система (1.1) удовлетворяет следующим условиям: 1) rank(H[L, D]) = rank([L, D]) (условие согласования), 2) все инвариантные нули тройки (F, [L, D], H) лежат в левой полуплоскости (минимальная фазовость). В [19, 20] эти условия ослаблены – требуется, чтобы линейная часть системы (1.1) была детектируемой, т.е. ненаблюдаемая часть системы устойчива.
Целью работы является дальнейшее ослабление этих условий за счет построения скользящих наблюдателей на основе модели исходной системы пониженной размерности, что дополнительно приводит к понижению размерности наблюдателя. Эффект ослабления условий достигается за счет того, что модель пониженной размерности может не иметь тех свойств, которые присутствуют в исходной системе и препятствуют возможности построения для нее скользящего наблюдателя.
Предполагается, что линейная часть системы (1.1) недетектируема, т.е. Ker(V(n)) ≠ $\emptyset $, где
Д о п у щ е н и е 1. Линейное подпространство Im(D) $ \not\subset $ Ker(V(n)).
Здесь Im(D) означает линейное подпространство, индуцированное столбцами матрицы D, Ker(V(n)) – линейное подпространство, такое, что из z ∈ Ker(V(n)) следует V(n)z = 0. Обозначим через rd минимальную сравнительную степень вектора y по отношению к функции d(t), ${{y}_{*}}$ – компоненту вектора y, соответствующую rd, и ${{R}_{*}}$ – матрицу-строку, такую, что ${{R}_{*}}$y(t) = ${{y}_{*}}$(t). Из допущения 1 следует, что rd < ∞ и матрица ${{R}_{*}}$ существует. Напомним, что сравнительная степень вектора y по отношению к функции d(t) – это минимальное целое k, такое, что HFk – 1D ≠ 0.
Предположим вначале, что возмущение ρ(t) отсутствует, и построим модель системы (1.1) минимальной размерности с выходом ${{y}_{*}}$(t), которая описывается уравнением
(1.3)
$\begin{gathered} {{{\dot {x}}}_{*}}(t) = {{F}_{*}}{{x}_{*}}(t) + {{G}_{*}}u(t) + {{J}_{*}}y(t) + {{C}_{*}}\Psi ({{x}_{*}}(t),y(t),u(t)) + {{D}_{*}}d(t), \\ {{y}_{*}}(t) = {{H}_{*}}{{x}_{*}}(t), \\ \end{gathered} $(1.4)
$\begin{gathered} \Phi F = {{F}_{*}}\Phi + {{J}_{*}}H,\quad {{R}_{*}}H = {{H}_{*}}\Phi ,\quad {{G}_{*}} = \Phi G,\quad {{D}_{*}} = \Phi D, \\ {{A}_{{*i}}} = ({{A}_{{*1i}}}\,\,{{A}_{{*2i}}})\left( \begin{gathered} \Phi \\ H \\ \end{gathered} \right),\quad i = \overline {{{i}_{1}},{{i}_{p}}} , \\ \end{gathered} $Д о п у щ е н и е 2. Пара (${{F}_{*}}$, ${{H}_{*}}$) наблюдаема.
Из допущения 2 следует, что матрицы ${{F}_{*}}$ и ${{H}_{*}}$ могут быть представлены в каноническом виде:
Такой вид матриц позволяет получить следующие уравнения для строк матриц Φ и ${{J}_{*}}$:
(1.5)
${{\Phi }_{k}} = {{R}_{*}}H,\quad {{\Phi }_{i}}F = {{\Phi }_{{i - 1}}} + {{J}_{{*i}}}H,\quad i = \overline {k,2} ,\quad {{\Phi }_{1}}F = {{J}_{{*1}}}H.$Запишем его в виде
где(1.7)
${\text{rank}}\left( \begin{gathered} \Phi \\ H \\ \end{gathered} \right) = {\text{rank}}\left( \begin{gathered} \Phi \\ H \\ {{A}_{i}} \\ \end{gathered} \right),\quad i = \overline {{{i}_{1}},{{i}_{p}}} .$Если оно выполняется, то принимается ${{G}_{*}}$ = ΦG и ${{D}_{*}}$ = ΦD; матрицы ${{A}_{{*1i}}}$ и ${{A}_{{*2i}}}$, i = $\overline {{{i}_{1}},{{i}_{p}}} $, определяются из (1.4). При невыполнении условия (1.7) ищется другое решение уравнения (1.6) при прежней или увеличенной размерности k. Предполагается, что ${{D}_{*}}$ ≠ 0.
2. Преобразование редуцированной модели. Дальнейшие построения осуществляются по аналогии с [20] с тем отличием, что предложенные там действия применяются в настоящей работе не к исходной системе, а модели (1.3) с учетом канонической формы матриц ${{F}_{*}}$ и ${{H}_{*}}$. Для этого представим описывающие ее матрицы в следующем виде:
(2.1)
$\begin{gathered} {{F}_{*}} = \left( {\begin{array}{*{20}{c}} {{{F}_{1}}}&{{{F}_{2}}} \\ {{{F}_{3}}}&{{{F}_{4}}} \end{array}} \right),\quad {{H}_{*}} = (0\,\,0\,\,...\,\,1),\quad {{G}_{*}} = \left( \begin{gathered} {{G}_{{*1}}} \\ {{G}_{{*2}}} \\ \end{gathered} \right), \\ {{J}_{*}} = \left( \begin{gathered} {{J}_{{*1}}} \\ {{J}_{{*2}}} \\ \end{gathered} \right),\quad {{C}_{*}} = \left( \begin{gathered} {{C}_{{*1}}} \\ {{C}_{{*2}}} \\ \end{gathered} \right),\quad {{D}_{*}} = \left( \begin{gathered} {{D}_{{*1}}} \\ {{D}_{{*2}}} \\ \end{gathered} \right), \\ \end{gathered} $Введем преобразование координат z = T${{x}_{*}}$ с матрицей T = $\left( {\begin{array}{*{20}{c}} {{{I}_{{k - 1}}}}&Q \\ 0&1 \end{array}} \right)$, где Ik – 1 ∈ R(k– 1) × (k– 1) – единичная матрица, матрица-столбец Q = (q1q2 … qk – 1)T ∈ R(k– 1) выбирается так, чтобы сделать матрицу ${{\bar {F}}_{1}}$ = F1 + QF3 устойчивой. Поскольку пара (F1, F3) с очевидность наблюдаема, такая матрица существует. В результате модель (1.3) принимает вид
(2.2)
$\begin{gathered} {{{\dot {z}}}_{1}}(t) = {{{\bar {F}}}_{1}}{{z}_{1}}(t) + {{{\bar {F}}}_{2}}{{y}_{*}}(t) + {{{\bar {G}}}_{{*1}}}u(t) + {{{\bar {J}}}_{{*1}}}y(t) + {{{\bar {C}}}_{{*1}}}\Psi ({{z}_{1}}(t),{{y}_{*}}(t),y(t),u(t)) + {{{\bar {D}}}_{{*1}}}d(t), \\ {{{\dot {z}}}_{2}}(t) = {{{\bar {F}}}_{3}}{{z}_{1}}(t) + {{{\bar {F}}}_{4}}{{y}_{*}}(t) + {{{\bar {G}}}_{{*2}}}u(t) + {{{\bar {J}}}_{{*2}}}y(t) + {{{\bar {C}}}_{{*2}}}\Psi ({{z}_{1}}(t),{{y}_{*}}(t),y(t),u(t)) + {{{\bar {D}}}_{{*2}}}d(t), \\ {{y}_{*}} = {{z}_{2}}, \\ \end{gathered} $Отметим, что ключевую роль в модели (2.2) играет тот факт, что матрица ${{\bar {F}}_{1}}$ устойчива. В [8] это следует из того, что все инвариантные нули тройки (F, [L D], H) лежат в левой полуплоскости, в [19, 20] – из детектируемости системы (1.1), в нашей работе – из канонического вида матриц ${{F}_{*}}$ и ${{H}_{*}}$.
3. Построение скользящего наблюдателя. Поскольку матрица ${{\bar {F}}_{1}}$ устойчива, существуют симметрические положительно-определенные матрицы P и W, такие, что $\bar {F}_{1}^{{\text{T}}}$P + P${{\bar {F}}_{1}}$ = –W. По аналогии с [20] скользящий наблюдатель строится в виде
(3.1)
$\begin{gathered} {{{\dot {\hat {z}}}}_{1}}(t) = {{{\bar {F}}}_{1}}{{{\hat {z}}}_{1}}(t) + {{{\bar {F}}}_{2}}{{y}_{*}}(t) + {{{\bar {G}}}_{{*1}}}u(t) + {{{\bar {J}}}_{{*1}}}y(t) + {{{\bar {C}}}_{{*1}}}\Psi ({{{\hat {z}}}_{1}}(t),{{y}_{*}}(t),y(t),u(t)) + {{{\bar {K}}}_{1}}{v}(t), \\ {{{\dot {\hat {z}}}}_{2}}(t) = {{{\bar {F}}}_{3}}{{{\hat {z}}}_{1}}(t) + {{{\bar {F}}}_{4}}{{y}_{*}}(t) + {{{\bar {G}}}_{{*2}}}u(t) + {{{\bar {J}}}_{{*2}}}y(t) + {{{\bar {C}}}_{{*2}}}\Psi ({{{\hat {z}}}_{1}}(t),{{y}_{*}}(t),y(t),u(t)) + {{k}_{2}}{{e}_{2}}(t) + {{k}_{3}}{v}(t), \\ {{{\hat {y}}}_{*}} = {{{\hat {z}}}_{2}}, \\ \end{gathered} $Из (2.2) и (3.1) получаем
(3.2)
$\begin{gathered} {{{\dot {e}}}_{1}}(t) = {{{\bar {F}}}_{1}}{{e}_{1}}(t) + {{{\bar {C}}}_{{*1}}}\Delta \Psi + {{{\bar {D}}}_{{*1}}}d(t) - {{{\bar {K}}}_{1}}{v}(t), \\ {{{\dot {e}}}_{2}}(t) = {{{\bar {F}}}_{3}}{{e}_{1}}(t) + {{{\bar {C}}}_{{*2}}}\Delta \Psi + {{{\bar {D}}}_{{*2}}}d(t) - {{k}_{2}}{{e}_{2}}(t) - {{k}_{3}}{v}(t), \\ \end{gathered} $Т е о р е м а. Пусть выполняется условие $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\lambda } $(W) ≥ 2||P${{\bar {C}}_{{*1}}}$||${{N}_{*}}$. Тогда если ${{\bar {D}}_{{*1}}}$ = 0, то наблюдатель (3.1) оценивает функцию d(t) в виде
в противном случае как где $D_{{*1}}^{ + }$ = ${{(\bar {D}_{{*1}}^{T}\bar {D}_{{*1}}^{{}})}^{{ - 1}}}\bar {D}_{{*1}}^{{}}$ и $D_{{*2}}^{ + }$ = ${{(\bar {D}_{{*2}}^{T}\bar {D}_{{*2}}^{{}})}^{{ - 1}}}\bar {D}_{{*2}}^{{}}$, ${{{v}}_{{{\text{eq}}}}}(t)$ – сигнал, представляющий разрывную функцию ${v}(t)$. Согласно [8], в качестве ${{{v}}_{{{\text{eq}}}}}(t)$ может быть принята непрерывная функция(3.6)
${{{v}}_{{{\text{eq}}}}}(t) = \frac{{{{e}_{1}}(t)}}{{{\text{||}}{{e}_{1}}(t){\text{||}} + \varepsilon }},$Д о к а з а т е л ь с т в о. По аналогии с [20] докажем, во-первых, что ||e1|| ≤ δ = max{δ1, δ2}, где
(3.7)
$\begin{gathered} {{{\dot {V}}}_{1}} = - e_{1}^{{\text{T}}}W{{e}_{1}} + 2e_{1}^{{\text{T}}}P{{{\bar {D}}}_{{*1}}}d - 2e_{1}^{{\text{T}}}P{{{\bar {K}}}_{{*1}}}{v} + 2e_{1}^{{\text{T}}}P{{{\bar {C}}}_{{*1}}}\Delta \Psi \leqslant \\ \leqslant - {\text{||}}{{e}_{1}}{\text{|}}{{{\text{|}}}^{2}}(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\lambda } (W) - 2{\text{||}}P{{{\bar {C}}}_{{*1}}}{\text{||}}{{N}_{*}}) + 2{\text{||}}{{e}_{1}}{\text{||}}(\beta {\text{||}}P{{{\bar {D}}}_{{*1}}}{\text{||}} + \,{\text{||}}P{{{\bar {K}}}_{1}}{\text{||}}). \\ \end{gathered} $Используя известное неравенство
Остальная часть доказательства с учетом того, что $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\lambda } $(W) ≥ 2||P${{\bar {C}}_{{*1}}}$||${{N}_{*}}$, совпадает с [20].
Покажем, во-вторых, что при соответствующем выборе коэффициентов усиления наблюдателя e2 = 0 за конечное время, т.е. достигается скользящий режим. Рассмотрим функцию Ляпунова V2 = $e_{2}^{2}$ и найдем ее производную по времени с учетом (3.2) и (3.3):
(3.8)
${{k}_{3}} \geqslant \delta (1 + \,{\text{||}}{{\bar {C}}_{{*2}}}{\text{||}}{{N}_{*}}) + \beta {\text{||}}{{\bar {D}}_{{*2}}}{\text{||}}\,,$В-третьих, для доказательства того, что при соответствующем выборе коэффициентов усиления наблюдателя e1 = 0 за конечное время, рассмотрим функцию Ляпунова V1 = $e_{1}^{{\text{T}}}$Pe1 и ее производную (3.7). Из второго уравнения в (3.2) и скользящего режима, когда e2 = ${{\dot {e}}_{2}}$ = 0, следует ${{\bar {F}}_{3}}$e1 = k3${v}$ – ${{\bar {C}}_{{*2}}}$ΔΨ – ${{\bar {D}}_{{*2}}}$d. Так как ${{\bar {K}}_{1}}$ = P–1$\bar {F}_{3}^{{\text{T}}}$k1, из (3.7) вытекает
Так как ||e1|| ≤ δ, получаем
Если k3 и k1 выбрать соответственно как
(3.9)
${{k}_{3}} \geqslant \beta {\text{||}}{{\bar {D}}_{{*2}}}{\text{||}} + \delta {\text{||}}{{\bar {C}}_{{*2}}}{\text{||}}{{N}_{*}},\quad {{k}_{1}} \geqslant \frac{{\delta \beta {\text{||}}P{{{\bar {D}}}_{{*1}}}{\text{||}} + {{\delta }^{2}}{\text{||}}P{{{\bar {C}}}_{{*1}}}{\text{||}}{{N}_{*}}}}{{{{k}_{3}} - \beta {\text{||}}{{{\bar {D}}}_{{*2}}}{\text{||}} - \delta {\text{||}}{{{\bar {C}}}_{{*2}}}{\text{||}}{{N}_{*}}}},$(3.10)
${{k}_{3}} \geqslant \delta (1 + \,{\text{||}}{{\bar {C}}_{{*2}}}{\text{||}}{{N}_{*}}) + \beta {\text{||}}{{\bar {D}}_{{*2}}}{\text{||}}\,.$Поскольку в скользящем режиме e1 = ${{\dot {e}}_{1}}$ = 0 и e2 = ${{\dot {e}}_{2}}$ = 0, то при ${{\bar {D}}_{{*1}}}$ = 0 функция d(t) может быть оценена из второго уравнения в (3.2) в виде (3.4); в противном случае нужно использовать первое уравнение в (3.2), что дает оценку (3.5).
4. Идентификация в присутствии возмущений. Условие ΦL = 0 нечувствительности к возмущению имеет вид (1 – ${{J}_{{*k}}}$ … –${{J}_{{*1}}}$)L(k) = 0 [3, 4], где
Последнее уравнение и (1.6) дают уравнение
решение которого ищется при минимальном k ≥ rd; дальнейшие действия аналогичны описанным выше. Если при всех k < n уравнение (4.1) не имеет решения, модель, не чувствительная к возмущению, не существует. В этом случае необходимо обратиться к робастным методам, описанным в [3], которые позволят найти приближенное решение.5. Пример. Рассмотрим систему управления:
(5.1)
$\begin{gathered} {{{\dot {x}}}_{1}}(t) = - {{x}_{1}}(t) + \sin ({{x}_{2}}(t)) + {{x}_{2}}(t) + u(t), \\ {{{\dot {x}}}_{2}}(t) = - {{x}_{2}}(t) + {{x}_{4}}(t) + d(t), \\ {{{\dot {x}}}_{3}}(t) = {{x}_{3}}(t) + {{x}_{4}}(t) + \rho (t), \\ {{{\dot {x}}}_{4}}(t) = {\text{|}}{{x}_{3}}(t){\text{|}} - {{x}_{4}}(t) + \rho (t), \\ {{y}_{1}}(t) = {{x}_{1}}(t),\quad {{y}_{2}}(t) = {{x}_{4}}(t). \\ \end{gathered} $Приведем матрицы и нелинейности, описывающие систему:
Так как rank(H[L D]) = 1 ≠ rank([L D]) = 2, то условие согласования не выполняется. Нетрудно видеть, что
Нетрудно видеть, что уравнение (4.1) имеет решение с матрицами ${{J}_{{*1}}}$ = (–1, 1), ${{J}_{{*2}}}$ = (–2, 0), тогда Φ1 = (1 1 0 0), Φ2 = (1 0 0 0) и ${{D}_{*}}$ = (0 1)T, ${{G}_{*}}$ = (1 1)T, ${{C}_{*}}$ = $\left( {\begin{array}{*{20}{c}} 1&0 \\ 1&0 \end{array}} \right)$, ${{C}_{*}}$Ψ(${{x}_{*}}$, y, u) = sin(${{x}_{{*1}}}$ – y1). В результате модель (1.3) принимает следующий вид:
Скользящий наблюдатель описывается уравнениями
(5.2)
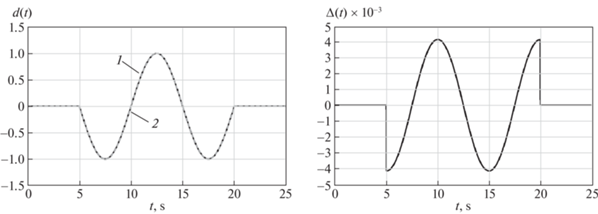
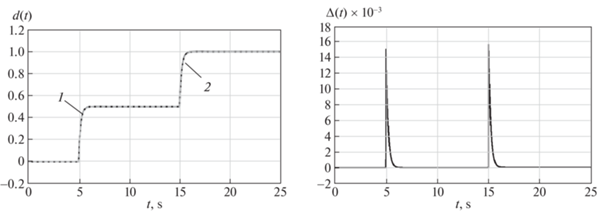
$\begin{gathered} {{{\dot {\hat {z}}}}_{1}}(t) = - {{{\hat {z}}}_{1}}(t) - {{y}_{*}}(t) + {{y}_{1}}(t) + {{y}_{2}}(t) + u(t) + {{{\bar {K}}}_{1}}{v}(t), \\ {{{\dot {\hat {z}}}}_{2}}(t) = {{{\hat {z}}}_{1}}(t) + {{y}_{*}}(t) - 2{{y}_{1}}(t) + \sin ({{{\hat {z}}}_{1}}(t)) + u(t) + {{k}_{2}}{v}(t) + {{k}_{3}}{{e}_{2}}(t), \\ {{{\hat {y}}}_{*}}(t) = {{{\hat {z}}}_{2}}(t), \\ \end{gathered} $Для моделирования рассмотрим систему (5.1) и наблюдатель (5.2) с u(t) = sin(t), β = 1.5, k1 = 1.5, k2 = 0.01, k3 = 6, |e1(0)| = 0. Результаты моделирования приведены на рис. 1 и 2, где показано поведение функции d(t), ее оценки $\hat {d}$(t) и ошибки оценивания Δ(t) = $\hat {d}$(t) – d(t) для двух типов функции d(t) – синусоидальной и ступенчатой соответственно.
Заключение. Рассмотрена задача идентификации дефектов в системах, описываемых нелинейными дифференциальными уравнениями, в присутствии возмущений на основе наблюдателей, работающих в скользящем режиме. Скользящий наблюдатель строится на базе редуцированной (имеющей меньшую размерность) модели исходной системы, обладающей избирательной чувствительностью по отношению к дефектам и возмущению. За счет введения такой модели удалось ослабить условия существования скользящих наблюдателей по сравнению с известными работами. Эффект ослабления указанных условий возник за счет того, что модель пониженной размерности может не иметь тех свойств, которые присутствуют в исходной системе и препятствуют возможности построения для нее скользящего наблюдателя. Результаты моделирования подтвердили работоспособность предложенного метода.
Список литературы
Мироновский Л.А. Функциональное диагностирование динамических систем. М.–СПб.: МГУ-ГРИФ, 1998.
Уткин В.И. Скользящие режимы и их применение в системах с переменной структурой. М.: Наука, 1974.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Методы идентификации и локализации дефектов в линейных системах на основе скользящих наблюдателей // Изв. РАН. ТиСУ. 2019. № 6. С. 73–89.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Метод идентификации дефектов в нелинейных системах на основе скользящих наблюдателей // Изв. РАН. ТиСУ. 2021. № 1. С. 11–23.
Edwards C., Spurgeon S. On the Development of Discontinuous Observers // Intern. J. Control. 1994. V. 59. P. 1211–1229.
Floquet T., Barbot J., Perruquetti W., Djemai M. On the Robust Fault Detection via a Sliding Mode Disturbance Observer // Intern. J. Control. 2004. V. 77. P. 622–629.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Диагностирование линейных динамических систем: подход на основе скользящих наблюдателей // АиТ. 2020. № 2. С. 18–35.
Yan X., Edwards C. Nonlinear Robust Fault Reconstruction and Estimation Using Sliding Mode Observers // Automatica. 2007. V. 43. P. 1605–1614.
He J., Zhang C. Fault Reconstruction Based on Sliding Mode Observer for Nonlinear Systems // Math. Problems in Eng. 2012. V. 2012. ID 451843. P. 1–22.
Alwi H., Edwards C. Fault Tolerant Control Using Sliding Modes with On-line Control Allocation // Automatica. 2008. V. 44. P. 1859–1866.
Chandra K., Alwi H., Edwards C. Fault Reconstruction for a Quadrotor Using an LPV Sliding Mode Observer // Proc. 9th IFAC Sympos. Safeprocess. Paris, France, 2015. P. 374–379.
Zhang K., Jiang B., Yan X., Mao Z. Sliding Mode Observer Based Incipient Sensor Fault Detection with Application to High-Speed Railway Traction Device // ISA Transactions. 2016. V. 63. P. 49–59.
Zhirabok A., Zuev A., Filaretov V. Fault Identification in Underwater Vehicle Thrusters via Sliding Mode Observers // Intern. J. Appl. Math. and Comp. Sci. 2020. V. 30. № 4. P. 679–688.
Floquet T., Edwards C., Spurgeon S. On Sliding Mode Observers for Systems with Unknown Inputs // Intern. J. Adapt. Contr. and Signal Proc. 2007. V. 21. P. 638–656.
Fridman L., Levant A., Davila J. Observation of Linear Systems with Unknown Inputs via High-order Sliding-Modes // Intern. J. Syst. Sci. 2007. V. 38. P. 773–791.
Tan C., Edwards C. Robust Fault Reconstruction Using Multiple Sliding Mode Observers in Cascade: Development and Design // Proc. of American Contr. Conf. St. Louis, USA, 2009. P. 3411–3416.
Alwi H., Edwards C., Tan C. Sliding Mode Estimation Schemes for Incipient Sensor Faults // Automatica. 2009. V. 45. P. 1679–1685.
Rios H., Efimov D., Davila J., Raissi T., Fridman L., Zolghadri A. Nonminimum Phase Switched Systems: HOSM Based Fault Detection and Fault Identification via Volterra Integral Equation // Intern. J. Adapt. Contr. and Signal Proc. 2014. V. 28. P. 1372–1397.
Hmidi R., Brahim A., Hmida F., Sellami A. Robust Fault Tolerant Control Design for Nonlinear Systems not Satisfying Matching and Minimum Phase Conditions // Intern. J. Contr., Autom. and Syst. 2020. V. 18. P. 1–14.
Wang X., Tan C., Zhou D. A Novel Sliding Mode Observer for State and Fault Estimation in Systems not Satisfying Matching and Minimum Phase Conditions // Automatica. 2017. V. 79. P. 290–295.
Жирабок А.Н., Шумский А.Е., Павлов С.В. Диагностирование линейных динамических систем непараметрическим методом // АиТ. 2017. № 7. С. 3–21.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления