

Известия РАН. Теория и системы управления, 2022, № 6, стр. 133-149
ИНТЕЛЛЕКТУАЛЬНАЯ ПОДДЕРЖКА РЕШЕНИЯ ЗАДАЧИ ОПЕРАТИВНОГО ЦЕЛЕПОЛАГАНИЯ ЭКИПАЖЕМ САМОЛЕТА НА ЭТАПЕ “ПОСАДКА”: КОЛЛИЗИЯ «ПРОБЕГ ПО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЕ – УГРОЗА “СЛАБОЕ ТОРМОЖЕНИЕ”»
А. М. Аспидова a, *, А. И. Еремин b, **, Б. Е. Федунов a, b, ***
a МАИ (национальный исследовательский ун-т)
Москва, Россия
b ФАУ “ГосНИИАС”
Москва, Россия
* E-mail: aspidova1999@mail.ru
** E-mail: aieremin@2100.gosniias.ru
*** E-mail: boris_fed@gosniias.ru
Поступила в редакцию 14.03.2022
После доработки 19.07.2022
Принята к публикации 01.08.2022
- EDN: NIVCAA
- DOI: 10.31857/S0002338822060038
Аннотация
Задача “Оперативное целеполагание” возникает у экипажа, когда на текущем этапе полета самолета появляется коллизия “Выполняемый этап полета – непосредственная угроза выполнению этого этапа”. Рекомендуемое экипажу конструктивное решение этой задачи совместно вырабатывают две бортовые интеллектуальные системы тактического уровня: интеллектуальной информационной системы “Ситуационная осведомленность экипажа” и бортовая оперативно советующая экспертная система “Оперативное целеполагание”. Обнаружить и предъявить экипажу возникшую коллизию – задача интеллектуальной информационной системы “Ситуационная осведомленность экипажа”. База знаний этой системы содержит математическую модель развития появившейся угрозы и процедуру расчета “точки невозврата” этой угрозы для каждого способа разрешения коллизии, который включен в базу знаний бортовой оперативно советующей экспертной системы “Оперативное целеполагание”. При приближении угрозы к “точке невозврата” данная экспертная система рекомендует облик способа решения возникшей коллизии: этап полета (текущая цель полета + ближайший этап ее достижения). Метод решения задачи оперативного целеполагания – решение по прецеденту. Представлен облик базы знаний бортовой оперативно советующей экспертной системы “Оперативное целеполагание”.
Введение. Задача “Оперативное целеполагание” возникает у экипажа, когда на текущем этапе полета самолета появляется коллизия “Выполняемый этап полета – непосредственная угроза выполнению этого этапа”. Рекомендуемое экипажу конструктивное решение этой задачи совместно вырабатывают две бортовые интеллектуальные системы тактического уровня: интеллектуальная информационная система “Ситуационная осведомленность экипажа” (ИИС СОЭ) [1, 2] и бортовая оперативно советующая экспертная система “Оперативное целеполагание” (БОСЭС-целеполагание) [1].
Создание баз знаний ИИС СОЭ и БОСЭС-целеполагание находится на первом этапе их разработки – этапе “Создание научно-технического задела” [3]. Этот этап состоит из нескольких фаз.
Первая фаза “Формализация предметной области”. Она включает в себя:
для ИИС СОЭ:
а) выявление (по материалам реальных посадок самолета выбранного типа) характерных для этапа полета коллизий “Рассматриваемый этап полета – непосредственная угроза его выполнению”,
б) определение (по материалам реальных посадок самолета выбранного типа) для каждой коллизии реализованных на практике способов ее разрешения (прецеденты разрешения коллизии),
в) конструирование облика базы знаний ИИС СОЭ: разработка процедур определения “точек невозврата” для каждой пары “Коллизия – способ ее разрешения”;
для БОСЭС-целеполагание:
а) накопление материала по реальным посадкам самолета для каждой коллизии и способов ее разрешения (прецедентов) и по составу координат ситуационного вектора SV (коллизия – прецеденты);
б) обработка совместно с летным составом накопленного материала и представление его в форме экспериментальной матрицы знаний и ансамблей функций принадлежности прикрепленных к ней нечетких множеств;
в) конструирование облика базы знаний БОСЭС-целеполагание: разработка процедурной матрицы знаний БОСЭС-целеполагание на базе полученной экспериментальной матрицы знаний.
Вторая фаза “Демонстрационные образцы ИИС СОЭ и БОСЭС-целеполагание для выбранной коллизии этапа полета”. Разработка для коллизии: 1) математических моделей развития угрозы (для ИИС СОЭ), 2) процедурной матрицы знаний (для БОСЭС-целеполагание) и 3) алгоритмов определения для БОСЭС-целеполагание численного значения координат ее ситуационного вектора SV (коллизия – прецеденты).
Третья фаза “Математическое моделирование работы фрагментов базы знаний ИИС СОЭ и БОСЭС-целеполагание” и создание их демонстрационных образцов для нескольких коллизий.
После прохождения всех фаз этапа “Создание научно-технического задела” демонстрационные образцы ИИС СОЭ и БОСЭС-целеполагание предъявляются Заказчику описание их баз знаний и результатов математического моделирования работы фрагментов баз знаний.
В статье рассматривается этап полета “Посадка” пассажирских самолетов типа МС-21 и возникающая при этом коллизия «Посадка: фаза “Пробег по взлетно-посадочной полосе (ВПП)” – “Слабое торможение”». Представляются результаты первых двух фаз этапа разработки ИИС СОЭ и БОСЭС-целеполагание “Создание научно-технического задела”.
1. Интеллектуальная информационная система “Ситуационная осведомленность экипажа”. Опишем этапы создания этой системы.
1.1. Накопление и упорядочение материалов по реальным посадкам пассажирских самолетов типа МС-21: коллизии этапа полета “Посадка”. Для выявления коллизий удобно этап полета “Посадка” представить через последовательность его фаз: 1) полет по глиссаде: снижение с 610 м, 2) выравнивание с высоты 20 м с приземлением, 3) пробег по ВПП.
Рассмотрение общедоступных источников информации позволило определить часть коллизии по фазам посадки, которые представлены в табл. 1.
Таблица 1.
Возможные коллизии на этапе полета пассажирского самолета типа МС-21
| Возможные коллизии на этапе полета “Посадка” | Фазы этапа “Посадка” |
|---|---|
| Высокое/низкое выравнивание | 2 |
| “Козление” | 3 |
| Препятствие на ВПП | 2, 3 |
| Оставшаяся часть полосы не обеспечивает безопасную посадку (посадка с перелетом) | 2, 3 |
| Особые случаи полета (пожар, отказ двигателя и др.) | 1, 2, 3 |
| Скопления птиц, представляющие угрозу для выполнения посадки | 1, 2 |
| Опасное метеоявление при заходе на посадку и посадке (сдвиг ветра, гроза, ливневые осадки и др.) | 1, 2 |
| Метеорологическая видимость составляет менее 1000 м | 1 |
| Пространственное положение ЛА не обеспечивает безопасный заход и посадку | 1, 2 |
| До пролета высоты принятия решения (ВПР) не установлен визуальный контакт с полосой или наземными ориентирами | 1 |
| Непотребный режим работы двигателя (РРД) | 1, 2 |
| Слабое торможение | 2 |
| До установления надежного визуального контакта с огнями приближения или другими ориентирами по курсу посадки сработала сигнализация ВПР и (или) опасного сближения с землей | 1 |
| Потерян визуальный контакт с огнями приближения (огнями ВПП) или наземными ориентирами при снижении с ВПР до минимально допустимой высоты ухода, согласно руководству по летной эксплуатации | 1 |
| Ошибочная посадка не на аэродроме назначения | 1, 2, 3 |
| Посадка на закрытую полосу | 1, 2, 3 |
Представим подробнее коллизию «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”».
1.2. ИИС СОЭ . Определение “точки невозврата” для коллизии “Посадка”: фаза “Пробег по ВПП” – угроза “Слабое торможение”. Точка невозврата (ТН) для любой непосредственной угрозы определяется в математической модели ее развития. В модель включена процедура вычисления/выделения момента времени (ТН), когда имеющимися на борту самолета средствами уже невозможно противодействовать возникшей угрозе [2].
Для разработки математической модели угрозы “Слабое торможение” с определением ее ТН проведены эксперименты на стенде КБО МС-21 ФАУ “ГосНИИАС” (рис. 1). Описание стенда “КБО: Конфигурация объекта испытаний в составе стенда КБО на момент испытаний” описана в документе ЮСИЯ.9754-00-046 “Конфигурация стенда КБО самолета МС-21”. Индекс конфигурации – № 038.034.

Для определения моментов наступления фаз посадки и их характеристик, необходимых для разработки базы знаний ИИС СОЭ, проведено моделирование на стенде МС-21 штатных посадок самолета профессиональным летчиком. Некоторые результаты моделирования показаны на рис. 2.
Рис. 2.
Результаты моделирования штатной посадки самолета МС-21, выполненной профессиональным летчиком
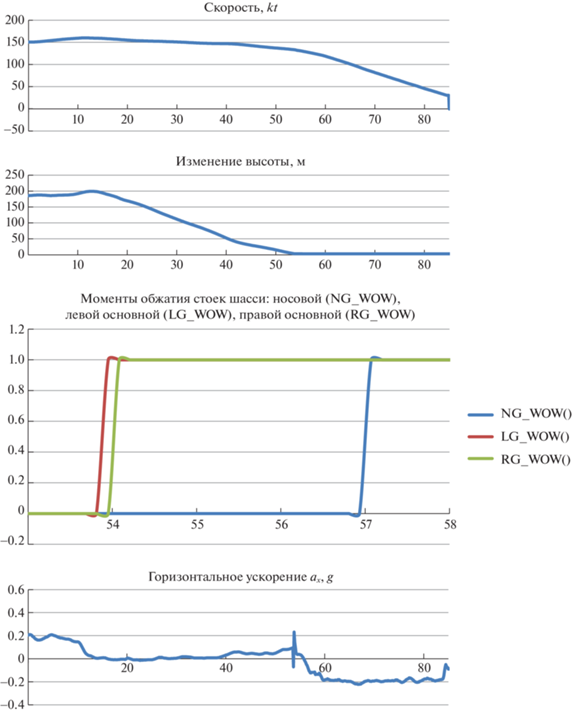
Отметим важные моменты рассматриваемого этапа полета “Посадка” летательного аппарата (ЛА).
1. Сход с глиссады (начало фазы “Выравнивание”, графики “Скорость”, “Изменение высоты”): момент времени tсход1, высота (tсход1), скорость (tсход1), tсход1 = 38.9 c; Hсход1 = 60.3 м; Vсход1 = = 147.1 kt.
2. Приземление: касание ВПП, обжатие стоек шасси (график “Моменты обжатия стоек шасси”). Скорость ЛА в момент касания ВПП составляет примерно V = 133.5 kt. Момент обжатия обеих основных стоек шасси t = 54.1 c, момент обжатия носовой стойки t = 57.1 c. Скорость ЛА в момент обжатия основных стоек шасси V(57.1) = 132.5 kt. Cкорость ЛА в момент обжатия всех стоек шасси V(57.1) = 126.2 kt.
3. Момент начала торможения с постоянным ускорением (графики “Моменты обжатия стоек шасси”, “Горизонтальное ускорение”). Торможение началось с начала выпуска интерцепторов в момент 54.1 с. С t = 59.4 с ускорение торможения колеблется с небольшой амплитудой вблизи значения ах = – 0.2 g.
4. Момент t достижения скорости V(tк) = Vсход2 схода с ВПП (скорость руления ЛА): tк = 85.0 с, V(tк) = 30 kt, где tк – конечный момент времени.
Для разработки математической модели определения ТН для разрешения коллизии «Этап полет “Посадка”: фаза “Пробег по ВПП” – угроза “Слабое торможение”» по прецеденту “Пробег с торможением по ВПП, решение “Взлетать: разбег с ускорением до скорости отрыва ЛА” проведено моделирование на стенде МС-21 для различных скоростей принятия решений на взлет.
В рамках этого эксперимента моделировалась посадка самолета МС-21 на ВПП: полет по глиссаде, выравнивание с парашютированием, пробег ЛА по полосе с торможением ЛА до заданной скорости принятия решения V(t), затем разгон самолета от этой скорости до скорости отрыва Vотрыва и взлет самолета. Фиксировалась длина отрезка ВПП, которая необходима самолету для такого разгона. Пример выполнения посадки с пробегом по ВВП до скорости V(t) = 50 kt, на которой летчик принял решение “Прекратить посадку. Взлет”, показан на рис. 3.
Рис. 3.
Результаты моделирования посадки самолета МС-21 “Пробег по ВПП с торможением до скорости V = 50 kt – взлет со скорости пробега V = 50 kt до достижения скорости отрыва Vотрыв”, выполненной профессиональным летчиком
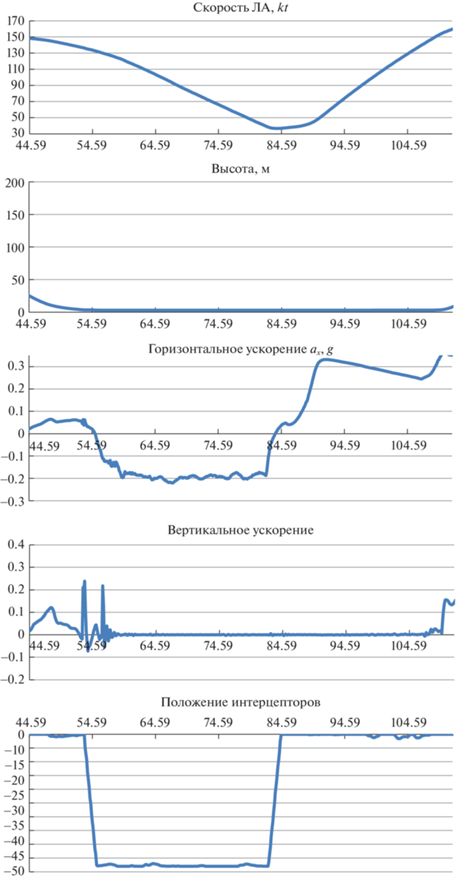
Рис. 3.
Окончание
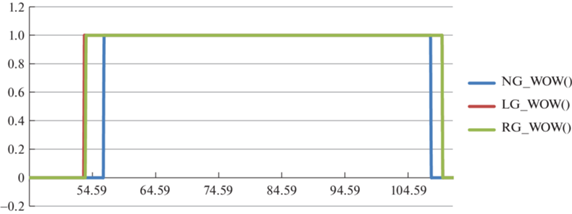
Информация по фазам посадки (пробег по ВПП с торможением до скорости V = 50 kt – взлет со скорости пробега V = 50 kt до достижения скорости отрыва Vотрыва).
1. Сход с глиссады: начало фазы “Выравнивание”:
момент времени схода c глиссады tсход1= 47 с,
высота схода H(tсход1) = 13.8 м,
скорость схода V(tсход1) = 164.2 kt.
2. Приземление:
время полного обжатия основных стоек tосн = 53.1 с, V(53.1) = 136.8 kt,
время полного обжатия носовой стойки tнос= 56.4 с, V(56.4) = 129.52 kt.
Длина горизонтальной проекции траектории самолета (отрезок ВПП) между этими точками tосн = 53.1 с и tнос = 56.4 с равна 226.3 м. Длина отрезка ВПП между точками tглс = 47 c и tнос = 56.4 с равна 670.6 м.
3. Момент начала торможения с постоянным ускорением а = const:
tаx = const = 59.3 с,
ускорение аx (t = 59.3) = – 0.2 (1.96 м/с2) в момент t = 59.3 с.
Длина отрезка ВПП между точками tосн = 53.1 с и tа = const = 59.3 с равна 414.5 м.
4. Момент принятия решения на взлет:
tрешен= 82.4 с,
скорость, на которой принято решение, V = 50 kt,
поднятие носовой стойки при t = 108.2 c,
отрыв главных стоек при t = 110.0 c.
Длина отрезка ВПП между точками t = 108.2 c и t = 110.0 c равна 139.2 м. Длина отрезка ВПП между точками обжатия основных стоек шасси при приземлении tосн = 53.1 с и моментом принятия решения на взлет tрешен = 82.4 с составляет Lпробега = 1367.8 м.
5. Момент достижения скорости отрыва. Отрыв носовой стойки шасси:
t = 108.2 c,
скорость отрыва V = 146.2 kt.
Отрыв основных стоек шасси:
t = 110.0 c,
скорость отрыва V =154.2 kt.
Длина отрезка ВПП между точками принятия решения на взлет tрешен = 82.4 с и моментом отрыва главных стоек шасси при взлете t = 110.0 c V = 50 kt равна L (V = 50 kt) = 1222.7 м.
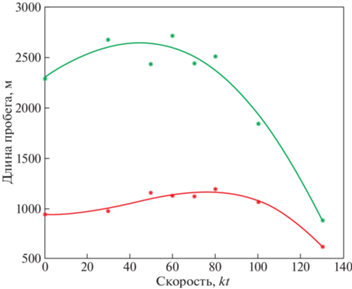
Моделирование на стенде МС-21 посадок “Пробег по ВПП с торможением до заданной скорости принятия решения на взлет Vрешен, разбег по ВПП со скорости пробега Vрешен до достижения скорости отрыва Vотрыва” выполнялось профессиональным летчиком. Итоговые результаты моделирования для различных Vрешен показаны на рис. 4.
Рис. 4.
Отрезок ВВП, необходимый для разгона самолета от текущей скорости Vрешен(t) до скорости отрыва Vотрыв (нижняя кривая) для aВПП = –0.2 g и Vотрыв = 154.2 kt. Верхняя кривая – отрезок ВПП, пройденный ЛА до момента принятия решения на взлет
1.3. База знаний ИИС СОЭ для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”». На основании данных экспериментов определяются моменты наступления точек невозврата. Для этого необходимо знать текущие координаты ЛА на ВПП и координаты конца ВПП. Их будем определять относительно точки пересечения линии глиссады с горизонтальной плоскостью (точка глиссады).
Привязку ЛА к концу ВПП проведем, используя априорные знания по расположению положения точки глиссады и точки конца ВПП (рис. 5).
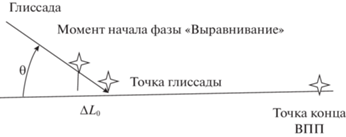
При снижении ЛА по глиссаде в момент схода с глиссады tсход1 летчик переходит на фазу посадки “Выравнивание – парашютирование”. Момент tсход1 фиксируется в базе знаний ИИС СОЭ процедурой “Начало выравнивания” и одновременно запускается процедура “Расчет ∆L0” (рис. 5). Введем обозначения: ∆L0 – длина отрезка от проекции на ВПП точки схода с глиссады (момент времени tсход1) до точки глиссады, LВПП – длина отрезка на ВПП от точки глиссады до конца ВПП, L(t) исп – длина использованного ЛА на текущий момент t пробега отрезка LВПП, отсчитываемая от точки глиссады.
База знаний ИИС СОЭ имеет два иерархических уровня. На верхнем (первом) иерархическом уровне определяется/опознается выполняемая в текущий момент фаза посадки. На втором иерархическом уровне выполняются процедуры, подключаемые к работе сигналами из первого иерархического уровня.
Процедуры базы знаний ИИС СОЭ. На фазе от момента схода с глиссады tсход1 до начала пробега по ВВП с постоянным ускорением торможения в базе знаний ИИС СОЭ работают две следующие процедуры.
Процедура 1. Определение длины использованного отрезка ВПП в каждый текущий момент времени L(t)исп:
Здесь tсход1 – момент схода с глиссады, Vx(t) – проекция текущей скорости ЛА ось ВПП, θ – угол наклона глиссады к оси ВПП.
На многофункциональный индикатор (МФИ) в кабине экипажа постоянно подается $L{{\left( t \right)}_{{{\text{исп}}~}}}$ с того момента, когда она становится неотрицательной.
Процедура 2 (включается после поступления сигнала “Обжатие всех стоек шасси”). В процедуре производится сглаживание на скользящем временном отрезке измеренных величин ускорений торможения ax с получением в каждый текущий момент времени ее осредненной величины $~a_{x}^{{^{*}}}$ = $a{\kern 1pt} *\left( t \right)$ с фиксацией момента, когда $a\left( t \right){\kern 1pt} *$ становится постоянной $~a{\kern 1pt} *\left( t \right)~$ = const.
Постоянно измеряемая величина a*(t) передается в процедуру оценки прогнозной текущей длины L(t, V(t)x,Vсход2), необходимой для достижения на пробеге скорости схода Vсход2 с ВПП. С момента, когда a*(t) становится постоянной a*(t) = const, в базе знаний ИИС СОЭ включаются в работу две следующие прогнозные процедуры.
Процедура 3 (прогноз потребного участка ВПП, необходимого для успешного завершения пробега). Пробег завершается успешно, если самолет достигает скорости Vсход2 схода с ВПП, не достигая конца ВПП.
Прогнозная текущая длина L(t, Vx(t), Vсход2) отрезка ВПП, необходимая для достижения на пробеге (с текущего момента пробега t) скорости схода Vсход2 с ВПП, равна:
Замечание 1. Использование в вычислении прогнозируемой потребной длины отрезка ВПП $L\left( {t,~{{V}_{x}}\left( t \right),{{V}_{{{\text{сход2}}}}}} \right)$ текущей оценки $a\left( t \right){\kern 1pt} *$ горизонтального ускорения, поступающей из процедуры, позволяет учитывать возможное фактическое изменение этой переменной по длине ВПП.
Текущий прогноз полной величины отрезка ВПП, который будет использован ЛА в момент достижения им в конце пробега скорости схода ${{V}_{{{\text{сход}}2}}}$ с ВПП равен сумме длины отрезка ВПП, уже использованного к текущему моменту $L{{\left( t \right)}_{{{\text{исп\;}}}}}$, и длины прогнозного отрезка $L\left( {t,~{{V}_{x}}\left( t \right),{{V}_{{{\text{сход2}}}}}} \right)$:
Текущая оценка ∆L(t, Vсход2) запаса ВПП для успешного завершения пробега (достижения скорости Vсход2 до конца ВПП) равна ∆L(t, Vсход2) = LВПП – L(t, Vсход2).
Текущие значения L(t, Vсход2) и ∆L(t, Vсход2) передаются на МФИ. Текущее значение ∆L(t, Vсход2) также передается в базу знаний БОСЭС-целеполагание.
Процедура 4. Информация для прогноза необходимого участка ВПП L(Vрешен, Vотрыв, аВПП для взлета ЛА (достижения ЛА скорости отрыва Vотрыв от ВПП), если на скорости разбега Vрешен экипаж принял решение “Прекратить посадку. Взлет”.
Разработка математических зависимостей этой процедуры требует представления в зависимостях модели отключения реверса тяги, модели перевода РРД на взлетный режим, учета на разбеге сцепления аВПП шасси самолета с ВПП. Математические зависимости этой процедуры определяются в процессе ее разработки после накопления необходимой экспериментальной информации. Кратко остановимся на этом.
Математические зависимости процедуры определения L(Vрешен, Vотрыв, аВПП) по экспериментальным данным, полученным в летном и/или стендовом эксперименте посадок на ВПП с различными установившимися ускорениями аВПП (из заданного диапазона), с последующим вычислением L(Vрешен, Vотрыв, $a_{{{\text{ВПП}}}}^{{^{*}}}$), для оперативно поступившей конкретной $a{\kern 1pt} _{{{\text{ВПП}}}}^{{^{*}}}$, происходит следующим образом.
Замечание 2. Для каждого аэродрома величина $a_{{{\text{ВПП}}}}^{{^{*}}}$ обычно периодически определяется аэродромными службами и передается на борт самолета, готовящегося к посадке на этот аэродром.
Для данного типа самолета проведены эксперименты посадок на аэродромы с различной $a{\kern 1pt} _{{{\text{ВПП}}}}^{{^{*}}}$. Пример серии экспериментов на стенде МС-21, когда при пробеге самолета экипаж принял решение “Прекратить посадку. Взлет” по взлету при различных скоростях принятия решений на взлет (экспериментальные точки на графике) и их аппроксимация полиномом третьего порядка (сплошная кривая), показаны в нижней части рис. 4.
Нижняя зависимость на рис. 4, полученная для конкретной величины $a_{{{\text{ВПП}}}}^{{{\text{экс}}}}$, которая использовалась в эксперименте, хорошо аппроксимируется полиномом третьего порядка:
(1.1)
$b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{1{\text{\;}}}}}V_{{{\text{прин}}}}^{3} + b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{2{\text{\;}}}}}V_{{{\text{прин}}}}^{2} + b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{3{\text{\;}}}}}{{V}_{{{\text{прин}}}}} + b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{4~}}} = L\left( {t,{{V}_{{{\text{отрыв}}}}}} \right).$Чтобы получить такую же зависимость типа (1.1) для произвольного ${{a}_{{{\text{ВПП}}}}}$, проведем эксперименты для нескольких ${{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{j}}$, j = 1…n.
Построим зависимость каждого коэффициента $~b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{1~}}},...,~b{{(a_{{{\text{ВПП}}}}^{{{\text{экс}}}})}_{{4~}}}$ от $~a_{{{\text{ВПП}}}}^{{{\text{экс}}}}~~ = {{a}_{{{\text{ВПП}}}}}$ и аппроксимируем каждую из них своим полиномом второго порядка. Получим расчетные зависимости коэффициентов полинома третьей степени:
(1.2)
$c{{({{b}_{2}})}_{1}}a_{{{\text{ВПП}}}}^{2} + c{{({{b}_{2}})}_{2}}{{a}_{{{\text{ВПП}}}}} + c{{({{b}_{2}})}_{3}} = b{{({{a}_{{{\text{ВПП}}}}})}_{2}},~$По этим зависимостям в процедуре 4 рассчитываем значения коэффициентов выражения (1.1) как функции от ${{a}_{{{\text{ВПП}}}}}$. С этими коэффициентами получаем зависимость для вычисления $L\left( {t,~{{V}_{{{\text{отрыва}}}}}} \right)$ для произвольного коэффициента торможения ${{a}_{{{\text{ВПП}}}}}$:
(1.3)
$\begin{gathered} b{{({{a}_{{{\text{ВПП}}}}})}_{{1{\text{\;}}}}}V_{{{\text{решен\;}}}}^{3} + b{{({{a}_{{{\text{ВПП}}}}})}_{{2{\text{\;}}}}}V_{{{\text{решен}}}}^{2} + b{{({{a}_{{{\text{ВПП}}}}})}_{{3{\text{\;}}}}}{{V}_{{{\text{решен}}}}} + b{{\left( {{{a}_{{{\text{ВПП}}}}}} \right)}_{{4~}}} = \\ {\text{\;}} = {\text{\;\;}}L\left( {t,{{V}_{{{\text{решен}}}}},{{V}_{{{\text{отрыв}}}}}} \right){\text{\;}}. \\ \end{gathered} $В процедуру 4 входят зависимости (1.2), (1.3), по которым для ${{a}_{{{\text{ВПП}}}}} = a_{{{\text{впп}}}}^{{^{*}}}$, оперативно полученного для выбранного аэродрома посадки, и конкретных $~{{V}_{{{\text{решен}}}}}$ и ${{V}_{{{\text{отрыв}}}}}$ рассчитывается текущее значение L(t, $~{{V}_{{{\text{решен}}}}}$, Vотрыв), которое передается в процедуру.
Процедура 5. Прогноз потребного участка ВПП, который необходим для взлета самолета с текущей скорости пробега $~V{{\left( t \right)}_{x}} = {{V}_{{{\text{решен}}}}}{\text{\;\;}}$ до скорости отрыва Vотрыва от ВПП.
Текущая оценка потребной длины отрезка ВПП L(t, Vотрыв) провести безопасный взлет с текущей скорости пробега ${{V}_{{{\text{решен}}}}} = V{{\left( t \right)}_{x}}$ определяется зависимостью
Текущая оценка ∆L (t, Vотрыв) возможности осуществить с текущей скорости ${{V}_{{{\text{решен}}}}} = {{V}_{x}}\left( t \right)$ пробега безопасный взлет (достичь после разбега скорости отрыва Vотрыв ЛА от ВПП) определяется как
Текущие значения L(t, Vотрыва) и ∆L(t, Vотрыв) передаются на МФИ. Значение ∆L(t, Vотрыв) также передается в базу знаний БОСЭС-целеполагание. На МФИ эта информация может представляться в виде табл. 2.
Таблица 2.
Возможная форма представления информации экипажу, по которой он может обосновано выбрать прецедент разрешения возникшей коллизии «Посадка: фаза “Пробег ВПП” – угроза “Слабое торможение”»
| L(t)исп | L(t, Vx(t),Vотрыв) | ∆L(t,Vотрыв) |
| L(t)исп | L(t, Vx(t),Vсход2) | ∆L(t,Vсход2) |
| Длина ВПП | ||
Непосредственно на МФИ верхнюю и среднюю полоски табл. 2 целесообразно представлять в виде, который для верхней полоски приведен на рис. 6.
Рис. 6.
ИИС СОЭ: предъявление экипажу точки невозврата коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» (показан процесс приближение самолета к точке невозврата)
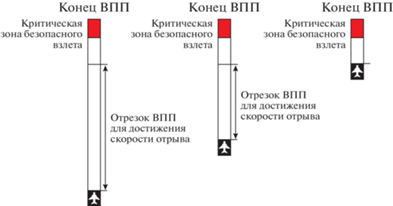
На рис. 6 видно изменение этой информации по трем последовательным моментам времени разбега самолета. Правая крайняя полоска соответствует положению самолета относительно конца ВПП, когда самолет достиг скорости отрыва.
2. База знаний БОСЭС-целеполагание для коллизии “Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”. БОСЭС-целеполагание для этапа полета “Посадка” находится на первой фазе первого этапа ее разработки – “Создание научно-технического задела” [3]. Для коллизии «Посадка: фаза “Пробег по ВПП” – “Слабое торможение”» ниже представлен облик ее базы знаний.
2.1. Накопление и упорядочение материалов по реальным посадкам пассажирских самолетов типа МС-21: прецеденты разрешения коллизии. Рассмотрение посадок в Твери [4], в Самаре [5], в Москве (аэропорт Шереметьево) [6], в Анталии [7], в Усинске [8] позволило выделить следующие прецеденты (Прц) решения экипажами рассматриваемой коллизии:
Прц-1: продолжить текущую фазу посадки,
Прц-2: прекратить этап полета “Посадка”, уйти на запасной аэродром.
Прц-3: прекратить этап полета “Посадка”, уйти на второй круг.
В каждом прецеденте Прц-2 и Прц-3 обязательно присутствует фаза пробега по ВПП с торможением, в конце которой экипажи могут принимать решение “Прекратить посадку. Взлет”. В этом случае только после отрыва от ВПП экипажи интересуются рекомендацией БОСЭС-целеполагание “Второй круг” или “Запасной аэродром”.
Для использования этих прецедентов в процедурах базы знаний БОСЭС-целеполагание нужно предварительно накопить достаточно большое число реально проведенных посадок, в которых возникала эта коллизия, и были реализованы найденные прецеденты.
Знания по условиям, в которых были успешно реализованы в прошлом эти прецеденты, представляются в форме ситуационного вектора SV (Коллизия «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» – прецеденты). Координатами этого ситуационного вектора являются лингвистические переменные (ЛП), термами которых описываются конкретные условия, в которых был реализован каждый прецедент [1]. ЛП ставится в соответствие набор нечетких множеств, число которых соответствует числу термов этой ЛП. Все эти нечеткие множества для этой ЛП определены на одном и том же универсальном множестве, а соответствующий им ансамбль функций принадлежности создается совместно с экипажами, которые использовали этот прецедент.
Вся необходимая для разработки базы знаний БОСЭС-целеполагания информация по выявленным прецедентам “упаковывается” в экспериментальную матрицу знаний (табл. 3). В ней каждому включенному в матрицу прецеденту ставится в соответствие блок строк матрицы. Строка блока описывает термами соответствующих ЛП условия, в которых был использован в прошлом этот прецедент.
Таблица 3.
Экспериментальная матрица знаний для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”»
| Номер по порядку реализации прецедента | Координаты ситуационного вектора SV (“Пробег по ВПП” – угроза “Слабое торможение” – Прецеденты) | Прецеденты | ||
|---|---|---|---|---|
| Х1: ЛП “Текущее количество топлива” | Х2: ЛП “Амбиция экипажа” | Х3: ЛП “Отношение погодных условий к минимуму погоды экипажа” | ||
| Критическое (крт) | Большая (бл) | Больше (бл) | ||
| Малое (мл) | Средняя (ср) | Меньше (мн) | ||
| Средняя (ср) | Малая (мл) | Существенно меньше (см) | ||
| 1.1 | крт | бл | мн | Пробег по ВПП |
| 1.2 | мл | бл | см | |
| 2.1 | крт | бл | бл | Уход на второй круг |
| 2.2 | ср | мл | мн | |
| 2.3 | мл | ср | см | |
| 3.1 | мл | мл | мн | Уход на запасной аэродром |
| 3.2 | ср | ср | бл | |
По доступной информации [4–8] удалось определить только часть координат упомянутого ситуационного вектора:
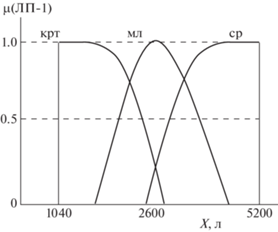
Х1 = ЛП “Текущее количество топлива”; ее термы {критическое (крт), малое (мл), среднее (ср)}. На вертикальной оси рис. 7 эта ЛП обозначена как ЛП-1.
Рис. 7.
Представление термов ЛП “Текущее количество топлива” через нечеткие множества, определенные на универсальном множестве [1040, 5200 л]
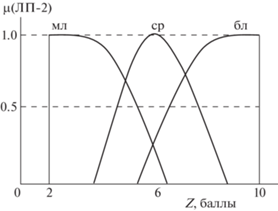
Х2 = ЛП “Амбиции экипажа”; ее термы {большие (бл), средние (ср), малые (мл)}. На вертикальной оси рис. 8 эта ЛП обозначена как ЛП-2.
Рис. 8.
Представление термов ЛП “Амбиции экипажа” через нечеткие множества, определенные на универсальном множестве [2, 10 ]
Х3 = ЛП “Отношение погодных условий к минимуму экипажа”; ее термы {больше (бл), меньше (мн), существенно меньше (см)}. На вертикальной оси рис. 9 эта ЛП обозначена как ЛП-3.
Рис. 9.
Представление термов “Отношение погодных условий к минимуму экипажа” через нечеткие множества, определенные на универсальном множестве [0.3, 2]
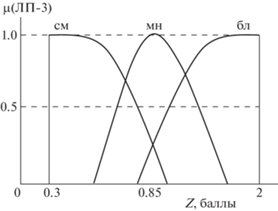
Экспериментальная матрица знаний для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» представлена в табл. 3 и на рис. 7–9.
Представление термов ЛП, которые являются координатами ситуационного вектора и используются в матрице знаний, осуществляется через ансамбли функций принадлежности нечетких множеств, показанных на рис. 7–9.
2.2. База знаний БОСЭС – целеполагание: процедурная матрица. В базу знаний БОСЭС-целеполагания включается процедурная матрица знаний, которая от экспериментальной матрицы знаний отличается двумя моментами [1]:
над нечеткими множествами экспериментальной матрицы знаний определены операции нечеткого отношения и нечеткого объединения,
в ней прикреплена процедура численного определения координат ситуационного вектора SV (Коллизия «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”»).
Заметим, что часто такую процедурную матрицу знаний называют процедурной матрицей нечетких множеств. Процедурная матрица знаний для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» представлена в табл. 4.
Таблица 4.
Процедурная матрица в базе знаний БОСЭС-целеполагание для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» (общий вид)
| Номер по порядку реализации прецедента | Координаты ситуационного вектора SV (“Пробег по ВПП” – угроза “Слабое торможение” – прецеденты) | Операция нечеткого отношения строчных нечетких множеств (min) | Операция нечеткого объединения (max) | Прецеденты | ||
|---|---|---|---|---|---|---|
| Х1: ЛП “Текущее количество топлива” | Х2: ЛП “Амбиции экипажа” | Х3: ЛП “Отношение погодных условий к минимуму экипажа” | ||||
| Критическое (крт) | Большая (бл) | Больше (бл) | ||||
| Малое (мл) | Средняя (ср) | Меньше (мн) | ||||
| Среднее (ср) | Малая (мл) | Существенно меньше (см) | ||||
| 1.1 | крт | бл | мн | min | max (по min) | Пробег по ВПП |
| 1.2 | мл | бл | см | min | ||
| 2.1 | крт | бл | бл | min | max (по min) | Уход на второй круг |
| 2.2 | ср | мл | мн | min | ||
| 2.3 | мл | ср | см | min | ||
| 3.1 | мл | мл | мн | min | max (по min | Уход на запасной аэродром |
| 3.2 | ср | ср | бл | min | ||
Так как в ИИС СОЭ есть конструктивные математические модели развития рассматриваемой угрозы при противодействии ей каждый прецедентом, то процедурная матрица должна выглядеть по-другому. На фазе посадки “Пробег по ВПП” в базу знаний БОСЭС-целеполагание из ИИС СОЭ поступает количественная оценка оставшегося отрезка ВПП при реализации прецедента Прц-1 ∆L(t, Vсхода) и количественная оценка ∆L(t, Vотрыва) первого этапа реализации двух других прецедентов Прц-2 и Прц-3. Отметим, что у прецедентов Прц-2 и Прц-3 первый этап реализации “Пробег по ВПП” одинаков. Это позволяет в базе знаний БОСЭС-целеполагание на этапе пробега ЛА по ВПП с торможением для разрешения названной выше коллизии использовать Прц-1 и обобщенный прецедент “Прекратить посадку. Взлетать”. При этом Прц-1 будет представлять на пробеге по ВПП два других прецедента Прц-2 и Прц-3. Рекомендуемый экипажу на этапе пробега ЛА прецедент выбирается между Прц-1 и обобщенным прецедентом базе знаний БОСЭС-целеполагание методом продукционных правил (табл. 5).
Таблица 5.
Выбор рекомендуемого экипажу прецедента на фазе посадки “Пробег по ВПП”
| SV (Посадка: фаза “Пробег по ВПП” – прецеденты) | Наличие потребного отрезка от прогнозной точки касания до конца ВВП |
|---|---|
| Продолжить посадку | Да |
| Прекратить посадку. Взлет | Нет |
С первым прецедентом все понятно, просто продолжаем посадку. Рассмотрим подробнее второй прецедент. Когда экипаж принимает рекомендацию прекратить посадку, в базе знаний БОСЭС должна активизироваться процедурная матрица, в которую входят только для прецедента Прц-2 и Прц-3, раннее включенные в обобщенный прецедент (табл. 6). В эту матрицу подаются данные из процедуры расчета значений координат ситуационного вектора SV (Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение” – прецеденты), чтобы найти приоритеты прецедентов Прц-2 и Прц-3. Прецедент с наибольшим приоритетом будет предъявлен экипажу на МФИ сразу после завершения взлета (отрыва ЛА от ВПП).
Таблица 6.
Процедурная матрица нечетких множеств в базе знаний БОСЭС-целеполагание для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» (используемый вид)
| Номер по порядку реализации прецедента | Координаты ситуационного вектора SV (Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение” – прецеденты) | Операция нечеткого отношения строчных нечетких множеств (min) | Операция нечеткого объединения max (по min) | Прецеденты | ||
|---|---|---|---|---|---|---|
| Х1: ЛП “Текущее количество топлива” | Х2: ЛП “Амбиции экипажа” | Х3: ЛП “Отношение погодных условий к минимуму экипажа” | ||||
| Критическое (крт) | Большая (бл) | Больше (бл) | ||||
| Малое (мл) | Средняя (ср) | Меньше (мн) | ||||
| Среднее (ср) | Малая (мл) | Существенно меньше (см) | ||||
| 1.1 | крт | бл | бл | min | max (по min) | Уход на второй круг |
| 1.2 | ср | мл | мн | min | ||
| 1.3 | мл | ср | см | min | ||
| 2.1 | мл | мл | мн | min | max (по min) | Уход на запасной аэродром |
| 2.2 | ср | ср | бл | min | ||
Представим облик процедуры расчета значений определившихся координат ситуационного вектора SV (Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение” – прецеденты).
Координата Х1 ситуационного вектора, которая представлена ЛП “Текущее количество топлива”. Информация о текущем количестве топлива на борту ЛА оперативно поступает в базу знаний БОСЭС-целеполагание.
Координата Х2 ситуационного вектора, которая представлена ЛП “Амбиции экипажа”. Под амбицией экипажа будем понимать поведение экипажа при решении о принятии или отклонении рекомендации, которую передает ему БОСЭС-целеполагание. Измерять будем ее в баллах, где 2 балла – безусловное принятие рекомендации, 10 – категоричное непринятие рекомендации. Чем ближе конец отрезка пробега к нижней границе критической зоны безопасного взлета, тем выше амбиции экипажа.
Процедуру расчета значения этой координаты следует разработать совместно со специалистами космической медицины.
Координата Х3 ситуационного вектора представлена ЛП “Отношение погодных условий к минимуму экипажа”.
Минимум погоды – состояние атмосферы на конкретной территории в данный временной промежуток. Установленные минимумы определяются фактической подготовкой командира воздушного судна (КВС), особенностью данного аэропорта и подходов к нему, оборудованием самолета, его аэродинамикой и наличием на аэродроме посадочных систем. В зависимости от этих определений различают несколько понятий об установленном посадочном минимуме погоды.
Погодный минимум командира – это градации высоты облаков и видимости, при которых КВС имеет право выполнять взлет и посадку.
Минимум аэропорта – это условия, которые установлены для данного конкретного аэропорта в соответствии с категорией ICAO (international civil aviation organization), т.е. к какой категории подходят радиотехнические системы посадки аэродрома, в таких погодных условиях осуществляется прием и выпуск бортов.
Минимум самолета – это такие значения облаков и видимости по горизонту, при которых конкретный самолет может садиться и взлетать (все зависит от оснащения самолета, прошедшего соответствующую сертификацию). Полеты производятся по наибольшему из этих значений минимумов.
Таким образом, до начала полета этот минимум известен. Информацию о текущих погодных условиях получаем с датчиков или от метеослужбы аэропорта.
Минимумы погоды и текущие погодные условия измеряются двумя компонентами: значениями облаков и видимости по горизонту. Расчет рассматриваемой компоненты ситуационного вектора будет происходить следующим образом. Вычисляем отношения минимума погоды и текущих погодных условий покомпоненто. Наименьшее получившееся значение является искомой координатой ситуационного вектора.
Пример. Пусть по текущей информации в процедуре расчета координат ситуационного значения определились Х1*, Х2*, Х3*. Соответствующие им значения термов ЛП, входящих в матрицу знаний, определяются по ансамблям функций принадлежности нечетких множеств, поставленных в соответствие этим координатам. Результаты представлены в табл. 7.
Таблица 7.
Результаты количественных оценок координат ситуационного вектора SV (коллизия – прецеденты) = (Х1* = 3140 л, Х2* = 7 баллов, Х3* = 0.85)
| Координата SV (коллизия – прецеденты) | Численное значение координаты SV (коллизия – прецеденты) | Нахождение ансамбля функций принадлежности координаты | Значения термов координаты, соответствующих ее численному значению |
|---|---|---|---|
| X1* | 3140 л | Рис. 10 | крт = 0, мл = 0.6, ср = 06 |
| X2* | 7 баллов | Рис. 11 | бл = 0.75, см = 0.75, мн = 0 |
| X3* | 0.85 | Рис. 12 | бл = 0.25, мн = 1.0, см = 0.25 |
Используя эти значения, преобразуем процедурную матрицу нечетких множеств (табл. 6) в процедурную матрицу расчета приоритетов прецедентов для количественного SV (коллизия – прецеденты), приведенную в табл. 8.
Таблица 8.
Процедурная матрица знаний для SV(коллизия – прецеденты) = (Х1*= 3140 л, Х2* = 7 баллов, Х3* = 0.85)
| Номер по порядку реализации прецедента | Координаты ситуационного вектора SV(“Пробег по ВПП” – угроза “Слабое торможение” – прецеденты) | Операция нечеткого отношения строчных нечетких множеств (min) | Операция нечеткого объединения строчных нечетких множеств (max (по min)) | Прецеденты (приоритет) | ||
|---|---|---|---|---|---|---|
| Х1: ЛП “Текущее количество топлива” | Х2: ЛП “Амбиции экипажа” | Х3: ЛП “Отношение погодных условий к минимуму погоды экипажа” | ||||
| Критическое (крт) | Большая (бл) | Больше (бл) | ||||
| Малое (мл) | Средняя (ср) | Меньше (мн) | ||||
| Среднее (ср) | Малая (мл) | Существенно меньше (см) | ||||
| 1.1 | 0 | 0.75 | 0.3 | 0 | 0.25 | Уход на второй круг (0.25) |
| 1.2 | 0.6 | 0 | 1.0 | 0 | ||
| 1.3 | 0.6 | 0.75 | 0.25 | 0.25 | ||
| 2.1 | 0.6 | 0 | 1.0 | 0 | 0.25 | Уход на запасной аэродром (0.25) |
| 2.2 | 0.6 | 0.7 | 0.25 | 0.25 | ||
В результате вычислений получены значения приоритетов прецедентов. Покажем возможный вариант сообщения экипажу рекомендаций БОСЭС-целеполагание. На рис. 10 рассмотрен кадр МФИ МС-21 с предполагаемым местом размещения рекомендации экипажу для решения коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”». Разработанный нами сигнал должен появляться на PFD (pilot flight display) самолета МС-21, когда экипаж подтверждает наличие коллизии, которую ему предъявила ИИС СОЭ. Подтверждается коллизия летчиком либо с помощью ручного ввода, либо его речевым сообщением.
Рис. 10.
Предполагаемое расположение разработанного сигнала (слева две светлые полоски) на PFD самолета МС-21
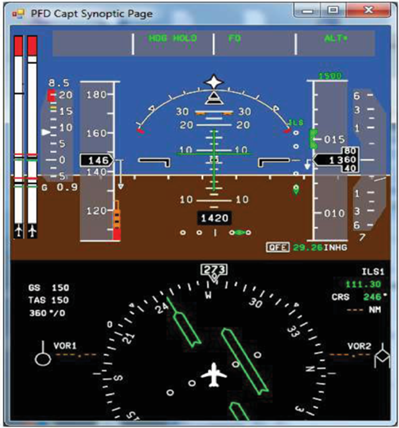
На фазе посадки “Пробег по ВПП” ИИС СОЭ подает сигнал (рис. 10), наглядно показывающий экипажу в каждый момент времени прогнозные потребные отрезки ВПП и расстояния до ТН при реализации экипажем одного из двух возможных решений:
“Продолжить посадку” (правая полоска на МФИ),
“Прекратить посадку. Взлет” (левая полоска на МФИ).
БОСЭС-целеполагание подсвечивает ту полоску, которая соответствует в данный момент рекомендуемому экипажу решению.
Заключение. Для коллизии «Посадка: фаза “Пробег по ВПП” – угроза “Слабое торможение”» разработана база знаний ИИС СОЭ и определен облик базы знаний БОСЭС-целеполагание. Базы знаний разрабатывались с использованием результатов полунатурного моделирования процесса посадки самолета МС-21 на стенде “Комплекс бортового оборудования самолета МС-21”, созданного в ГосНИИАС, и материалов открытых источниковпо коллизиям, возникающих на этапе посадки самолетов типа МС-21.
Для базы знаний ИИС СОЭ определены встречающиеся на посадке коллизии и для одной из них созданы математические модели определения ТН для прецедентов “Завершить пробег до скорости схода самолета с ВПП” и “Прекратить пробег. Взлет”, входящих в базу знаний БОСЭС-целеполагание”.
Для базы знаний БОСЭС-целеполагание найдены:
облик экспериментальной матрицы знаний, как формы сохранения информации о реальных посадках самолетов типа МС-21, в которых возникала упомянутая коллизия,
облик процедурной матрицы знаний, входящей в базу знаний БОСЭС-целеполагание.
Опыт этой конкретной разработки показал, что для процедур решения задачи оперативного целеполагания в ряде случаев можно использовать следующее:
если в базе знаний ИИС СОЭ есть конструктивные математические модели расчета ТН для каждого прецедента, входящего в базу знаний БОСЭС-целеполагание, то процедуру выбора предпочтительного прецедента можно строить не по прецеденту, а реализовать на продукционных правилах;
если для нескольких прецедентов, входящего в базу знаний БОСЭС-целеполагание, первый этап в реализации этих прецедентов одинаков, то можно эти прецеденты объединить в один обобщенный прецедент, сконструировав при этом новую процедурную матрицу знаний и “урезанную” процедурную матрицу знаний для прецедентов, входящих в обобщенный прецедент. Последняя матрица знаний будет включаться в работу, если в первой матрице знаний будет выбран обобщенный прецедент.
Список литературы
Федунов Б.Е. Бортовые интеллектуальные системы тактического уровня для антропоцентрических объектов (примеры для пилотируемых летательных аппаратов. М.: Де Либри, 2018. 245 с.
Федунов Б.Е. Электронный летчик: “Точка невозврата” пройдена не будет. Бортовые оперативно советующие экспертные системы тактического уровня для пилотируемых летательных аппаратов // Авиапанорама. 2016. № 1. С. 9–20.
ГОСТ Р 58048 2017. “Трансфер технологий. Методические указания по оценке уровня зрелости технологий”.
Окончательный отчет ЕЭВС, самолет “Sky cruiser” RA-1451G. Тверь, 2014.
Окончательный отчет, самолет В300RA-02778. Самара, 2014.
Окончательный отчет ЕЭВС, самолет Gulfstream G200 4K-AZ88. М. (аэропорт Шереметьево), 2019.
Промежуточный отчет ЕЭВС, самолет A-321-231 VQ-BRS. Анталия, 2020.
Окончательный отчет ЕЭВС самолет Boeing 737-500 VQ-BPS. Усинск, 2020.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления