

Известия РАН. Теория и системы управления, 2022, № 6, стр. 11-19
СИСТЕМА ВЗАИМОСВЯЗАННОГО УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В УСЛОВИЯХ ИНФОРМАЦИОННОГО ПРОТИВОДЕЙСТВИЯ
В. А. Болдинов a, *, В. А. Бухалёв b, А. А. Скрынников a, c
a МАИ (национальный исследовательский ун-т)
Москва, Россия
b Московский научно-исследовательский телевизионный ин-т
Москва, Россия
c ФАУ “ГосНИИАС”
Москва, Россия
* E-mail: viktorboldinov@mail.ru
Поступила в редакцию 19.04.2022
После доработки 12.05.2022
Принята к публикации 01.08.2022
- EDN: AERCXE
- DOI: 10.31857/S000233882206004X
Аннотация
Рассматривается задача взамосвязанного управления группой беспилотных летательных аппаратов, наводящихся на группу объектов, часть которых является ложными, создаваемыми с помощью имитационных помех и усиливаемыми маскирующими помехами, которые вызывают перерывы информации. Разработан информационно-управляющий алгоритм взаимодействующих беспилотных летательных аппаратов, осуществляющий распознавание помеховых ситуаций, оценивание координат объектов и наведение с требуемой точностью к заданной дистанции между соседними беспилотными летательными аппаратами. Приведен пример построения информационно-управляющего взаимосвязанного алгоритма в задаче наведения двух беспилотных летательных аппаратов на один и тот же объект, прикрываемый имитационной и маскирующей помехами.
Введение. Современные наземные, морские и воздушные объекты обладают высокоразвитыми эффективными системами информационного противодействия управлению беспилотных летательных аппаратов (БПЛА) [1–4].
Информационное противодействие создается с помощью маскирующих помех, предназначенных для “подавления” приемных устройств систем наведения БПЛА, и имитационных помех, способных дезориентировать БПЛА. Для защиты от противодействия кроме технических и алгоритмических способов и средств распознавания помех и соответствующего изменения технических характеристик систем наведения применяются различные тактические приемы, одним из которых является наведение группы взаимодействующих БПЛА [5].
Для повышения эффективности противодействия, а также из-за ограничений по электромагнитной совместимости при выполнении других задач объект осуществляет резкую внезапную и, как правило, скрытую перестройку параметров и характеристик противодействия, что приводит к возникновению случайных скачкообразных процессов в системах наведения БПЛА.
В настоящей статье рассматривается задача построения алгоритмов взаимодействия БПЛА в группе при распознавании помеховой ситуации и оценивании координат объектов и расстояния между соседними участниками группы БПЛА. Задача решается на основе теории систем со случайной скачкообразной структурой (ССС) [3, 4, 6–13].
1. Постановка задачи. Группа БПЛА наводится на некоторый объект. С учетом ложных целей число одновременно наблюдаемых объектов i в системе наведения каждого БПЛА равно m; число классов объектов $j$ равно $n$, из них первый класс – цель (Ц), остальные – различные помехи (П). В системе наведения производится разделение сигналов от пространственно разнесенных источников излучения и сигналов по информационным признакам различия по каналам. Предварительный анализ информации осуществляется отдельно в каждом канале, а затем выполняется ее комплексирование, в результате чего происходит распознавание текущей ситуации противодействия и оценивание пространственных координат объекта.
В зависимости от конкретных условий (тип системы наведения, класс объектов и пр.) в качестве используемых признаков могут быть выбраны различные пространственные, геометрические, кинематические, спектральные и энергетические информационные различительные признаки. При выборе признака различия основную роль играют три фактора: сложность определения признака, точность его оценивания и инвариантность к условиям применения. Идеальным вариантом является независимость характеристик признака от условий применения, приемлемым – незначительная зависимость от тех условий, которые в системе не определяются.
Выбранные признаки делятся на две группы: 1) континуальные (принадлежащие к непрерывному множеству значений) и 2) принадлежащие конечному множеству значений. Первая группа наблюдается с помощью измерителей, вторая – с помощью индикаторов. Число возможных ситуаций противодействия (состояний структуры $s(t)$), составляющих полную группу несовместных случайных событий, равно $N$: $s = \overline {1,N} $.
Состояния структуры представляют собой различные сочетания наблюдаемых объектов $i$ и классов $j$. Например, множество возможных ситуаций противодействия (состояний структуры $s$), составляющих полную группу несовместных случайных событий для $m = 2$, $n = 2$, представлено в табл. 1.
Таблица 1.
Ситуации противодействия в СН БПЛА при захвате цели
| s | $i = 1$ | $i = 2$ |
|---|---|---|
| 1 | $j = 1$ (Ц) | $j = 2$ (П) |
| 2 | $j = 2$ (П) | $j = 1$ (Ц) |
| 3 | $j = 2$ (П) | $j = 2$ (П) |
| 4 | 0 | 0 |
Как видно из таблицы, $s$-я ситуация при $s = \overline {1,3} $ состоит в том, что $i$-й объект принадлежит $j$‑му классу ($j = 1$ – цель, $j = 2$ – ложная цель (помеха)), $i = 1,{\kern 1pt} 2$; $j = 1,{\kern 1pt} 2$. Ситуация $s = 4$ означает, что система наведения подавлена мощной шумовой помехой. Ситуации, когда подавлен только один из каналов ($i = 1$ или 2), а другой – нет, принципиально возможны, но их вероятность по сравнению с вероятностями перечисленных в таблице ситуаций ничтожно мала.
Динамика и измерение непрерывнозначных различительных признаков описываются линейными уравнениями (в дискретной форме), позволяющими применить фильтры Калмана для синтеза алгоритмов, что широко используется на практике при конструрировании систем управления летательных аппаратов:
(1.1)
${{x}_{{k + 1}}}(j) = {{A}_{k}}(j){{x}_{k}}(j) + {{B}_{k}}(j){{u}_{k}}(j) + {{H}_{k}}(j){{w}_{k}}(j) + {{F}_{k}}(j){{\xi }_{k}}(j),$(1.2)
$z_{k}^{{(i)}}\left( j \right) = {{x}_{k}}(j) + {{\zeta }_{k}}(j),\quad k = 0,1,2 \ldots ;\quad i = \overline {1,m} ;\quad j = \overline {1,n,} $Различительные признаки, принадлежащие к конечному множеству, распознаются с помощью индикаторов признаков, которые используются для составления формул, описывающих индикаторы структуры ${{s}_{k}}$:
(1.3)
$\begin{gathered} {{\pi }_{{k + 1}}}({{r}_{{k + 1}}}\,{\text{|}}\,{{r}_{k}},{{s}_{{k + 1}}}) = \prod\limits_{\nu = 1}^l \,{{\pi }_{{k + 1}}}(r_{{k + 1}}^{{(\nu )}}\,{\text{|}}\,r_{k}^{{(\nu )}},{{s}_{{k + 1}}}), \\ {{\pi }_{{k + 1}}}(r_{{k + 1}}^{{(\nu )}}\,{\text{|}}\,r_{k}^{{(\nu )}},{{s}_{{k + 1}}}) = \left\{ \begin{gathered} {\text{1}} - \pi _{{k + 1}}^{{*\left( \nu \right)}}\quad {\text{при}}\quad r_{{k + 1}}^{{(\nu )}} \ne r_{k}^{{(\nu )}}, \hfill \\ \pi _{{k + 1}}^{{*\left( \nu \right)}}\quad {\text{при}}\quad r_{{k + 1}}^{{(\nu )}} = r_{k}^{{(\nu )}}, \hfill \\ \end{gathered} \right. \\ \pi _{{k + 1}}^{{*\left( \nu \right)}} = \pi _{k}^{{*\left( \nu \right)}}{{e}^{{ - \frac{{\Delta t}}{T}}}} + \left( {1 - {{e}^{{ - \frac{{\Delta t}}{T}}}}} \right){{{\bar {\pi }}}_{{k + 1}}}(r_{{k + 1}}^{{(\nu )}}\,{\text{|}}\,{{s}_{{k + 1}}}), \\ \end{gathered} $Индикаторы структуры применяются в системах наведения для обнаружения и распознавания ситуаций противодействия и помех. Например, индикаторы скачков мощности и амплитуды предназначены для обнаружения факта отстрела инфракрасных и радиолокационных ловушек, а также включения форсажа двигателей истребителя при маневре, указывающего на увеличение его ускорения. Индикаторы, измеряющие отношение “сигнал–шум”, используются для обнаружения шумовых маскирующих помех, гребенчатые доплеровские фильтры – для разрешения целей в группе. Индикаторы таких геометрических признаков, как, например, площадь или конфигурация изображения объектов применяются в фокальной плоскости приемников телевизионных и тепловизионных систем, индикаторы эффективной площади рассеивания электромагнитного излучения – в радиолокационных системах наведения и др. [1, 4, 14].
Основными алгоритмическими характеристиками индикаторов являются вероятность обнаружения или распознавания и время обработки информации от момента поступления входного сигнала до момента принятия решения, характеризуемое параметром инерционности T.
В научно-технической литературе используются такие хорошо известные специалистам по теории и системам управления общепринятые понятия, как, например, “вероятность пропуска сигнала” и “вероятность ложной тревоги” в задачах различения двух альтернативных гипотез [4, 5, 15, 16].
Требуется построить алгоритм взаимосвязанного распознавания помеховых ситуаций, оценивания координат объекта и определения расстояния между соседними участниками группы БПЛА.
2. Алгоритм распознавания помеховых ситуаций, оценивания координат объекта и управления БПЛА. Информационно-управляющий алгоритм, основанный на теории ССС, состоит из пяти блоков [3, 4, 6–8]:
классификатор структуры,
идентификатор структуры,
фильтр Калмана,
дисперсиометр,
регулятор,
которые описываются следующими формулами.
1. Классификатор структуры:
(2.1)
${{\hat {p}}_{{k + 1}}}({{s}_{{k + 1}}}) = \frac{{{{\vartheta }_{{k + 1}}}({{s}_{{k + 1}}})}}{{\sum\limits_{{{s}_{{k + 1}}}} {{\vartheta }_{{k + 1}}}({{s}_{{k + 1}}})}},\quad {{\hat {p}}_{0}}({{s}_{0}}) = {{p}_{0}}({{s}_{0}}),$(2.2)
${{\vartheta }_{{k + 1}}}({{s}_{{k + 1}}}) \triangleq {{\tilde {p}}_{{k + 1}}}({{s}_{{k + 1}}}){{\pi }_{{k + 1}}}({{r}_{{k + 1}}}\,{\text{|}}\,{{r}_{k}},{{s}_{{k + 1}}})exp\left[ { - {{\Delta }_{{k + 1}}}({{s}_{{k + 1}}})} \right],$(2.3)
${{\Delta }_{{k + 1}}}({{s}_{{k + 1}}}) \triangleq {{\left[ {\sum\limits_{i = 1}^m \sum\limits_{j{\kern 1pt} *(s)} \sum\limits_{\beta = 1}^b \frac{{{{{({{z}^{{i\beta }}} - {{{\tilde {x}}}^{{j{\kern 1pt} *(s)\beta }}})}}^{2}}}}{{2{{\Theta }^{{j{\kern 1pt} *(s)\beta }}}}}} \right]}_{{k + 1}}},$(2.4)
${{\tilde {p}}_{{k + 1}}}({{s}_{{k + 1}}}) = \sum\limits_{{{s}_{k}} = 1}^N {{q}_{k}}({{s}_{{k + 1}}}\,{\text{|}}\,{{s}_{k}}){{\hat {p}}_{k}}({{s}_{k}}),\quad {{s}_{k}} = \overline {1,N} ,$(2.5)
${{\Theta }^{{j{\kern 1pt} *(s)\beta }}} \triangleq {{[{{\tilde {R}}^{{j{\kern 1pt} *(s)\beta }}} + {{Q}^{{j{\kern 1pt} *(s)\beta }}}]}_{{k + 1}}},$Например, для частного случая, приведенного в табл. 1 ($m = 2$, $n = 2$, $N = 4$) и при двух (b = 2) непрерывнозначных различительных признаках $\beta = 1,2$, формула (2.3) принимает следующий вид:
(2.6)
$\begin{gathered} {{\Delta }_{{k + 1}}}(1) = \frac{1}{2}\sum\limits_{\beta = 1}^2 \,{{\left[ {\frac{{({{z}^{{1\beta }}} - {{{\tilde {x}}}^{{1\beta }}})}}{{{{\Theta }^{{1\beta }}}}} + \frac{{({{z}^{{2\beta }}} - {{{\tilde {x}}}^{{2\beta }}})}}{{{{\Theta }^{{2\beta }}}}}} \right]}_{{k + 1}}},\quad {{\Delta }_{{k + 1}}}(2) = \frac{1}{2}\sum\limits_{\beta = 1}^2 \,{{\left[ {\frac{{({{z}^{{1\beta }}} - {{{\tilde {x}}}^{{2\beta }}})}}{{{{\Theta }^{{2\beta }}}}} + \frac{{({{z}^{{2\beta }}} - {{{\tilde {x}}}^{{1\beta }}})}}{{{{\Theta }^{{1\beta }}}}}} \right]}_{{k + 1}}}, \\ {{\Delta }_{{k + 1}}}(3) = \frac{1}{2}\sum\limits_{\beta = 1}^2 \,{{\left[ {\frac{{({{z}^{{1\beta }}} - {{{\tilde {x}}}^{{2\beta }}})}}{{{{\Theta }^{{2\beta }}}}} + \frac{{({{z}^{{2\beta }}} - {{{\tilde {x}}}^{{2\beta }}})}}{{{{\Theta }^{{2\beta }}}}}} \right]}_{{k + 1}}},\quad {{\Delta }_{{k + 1}}}(4) = 0. \\ \end{gathered} $2. Идентификатор структуры:
(2.7)
${{\hat {s}}_{k}} = arg\mathop {\max }\limits_{{{s}_{k}}} {{\hat {p}}_{k}}({{s}_{k}}),\quad {{\tilde {s}}_{k}} = arg\mathop {\max }\limits_{{{s}_{k}}} {{\tilde {p}}_{k}}({{s}_{k}}).$3. Фильтр Калмана:
(2.8)
${{\hat {X}}_{{k + 1}}} = {{[\tilde {X} + \tilde {R}{{\Theta }^{{ - 1}}}(Z - \tilde {X})]}_{{k + 1}}},$4. Дисперсиометр:
(2.10)
${{\hat {R}}_{{k + 1}}} = {{[\tilde {R} + \tilde {R}{{\Theta }^{{ - 1}}}\tilde {R}]}_{{k + 1}}},$5. Регулятор. Представляет собой закон управления БПЛА $u{\kern 1pt} _{k}^{*}$, зависящий от $\hat {x}_{k}^{{\text{Ц}}}$, ${{\hat {L}}_{k}}$ и их производных, где $\hat {x}_{k}^{{\text{Ц}}}$ – оценка вектора пространственных координат цели; ${{\hat {L}}_{k}}$ – оценка расстояния между двумя соседними БПЛА. Вектор $x_{k}^{{\text{Ц}}}$ – это часть общего вектора различительных признаков xk, описываемого уравнением (1.1).
В зависимости от условий конкретной задачи (типы и характеристики объектов и БПЛА) закон управления может иметь различный вид. Оценка расстояния ${{\hat {L}}_{k}}$ также может иметь различную форму зависимости от $\hat {x}_{k}^{{{\text{Ц1}}}}$ и $\hat {x}_{k}^{{{\text{Ц2}}}}$, вычисляемых в системах управления двух соседних БПЛА (см. п. 3).
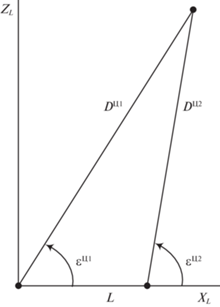
3. Пример. В горизонтальной плоскости декартовой прямоугольной системы координат $({{z}_{L}},{{x}_{L}})$, ось ${{x}_{L}}$ которой совпадает с направлением ${{L}_{k}}$, с различных направлений на одну цель, прикрываемую одной ложной целью (“помехой”), наводится два БПЛА (рис. 1 ).
Непрерывнозначными различительными признаками являются: $D_{k}^{{\text{Ц}}}$ – дальность до цели; $D_{k}^{{\text{П}}}$ – дальность до помехи; $\varepsilon _{k}^{{\text{Ц}}}$ – угол пеленга цели; $\varepsilon _{k}^{{\text{П}}}$ – угол пеленга помехи. Различительные признаки принадлежат конечному множеству: “геометрические” ${{\sigma }^{{\text{Ц}}}}$, ${{\sigma }^{{\text{П}}}}$ и “спектральные” ${{\lambda }^{{\text{Ц}}}}$, ${{\lambda }^{{\text{П}}}}$ (${{\sigma }^{{\text{Ц}}}}$, ${{\sigma }^{{\text{П}}}}$, ${{\lambda }^{{\text{Ц}}}}$, ${{\lambda }^{{\text{П}}}}$ – константы). Таким образом, m = 2, n = 2, $b = 2$, $l = 2$.
Множество возможных помеховых ситуаций (состояний структуры $s$) представлено в табл. 2.
Таблица 2.
Ситуации противодействия в СН БПЛА при автосопровождении цели
| s | i = 1 | i = 2 |
|---|---|---|
| 1 | j = Ц | j = П |
| 2 | j = П | j = Ц |
| 3 | 0 |
Системы наведения обоих БПЛА по двухсторонней линии связи обмениваются информацией об оценках дальностей и углов. На основании этой информации в обеих системах вычисляется расстояние ${{L}_{k}}$ между БПЛА, которое затем регулируется в заданных пределах.
Число состояний структуры $N = 3$ (см. табл. 1). В общем случае структура ${{s}_{k}}$ – марковская цепь с вероятностями переходов ${{q}_{k}}({{s}_{{k + 1}}}\,{\text{|}}\,{{s}_{k}})$, которые учитывают возможность пересечения трасс объектов в фокальной плоскости приемного устройства в промежутке времени между двумя соседними измерениями. При малом $\Delta t$ пересечение трасс фиксируется с высокой вероятностью. Тогда происходит обмен номерами каналов $L$, и это равносильно тому, что пересечения как бы не произошло. Математически это формулируется в следующем виде: при ${{s}_{k}},{\kern 1pt} {{s}_{{k + 1}}} = 1,{\kern 1pt} 2$
(3.1)
${{q}_{k}}({{s}_{{k + 1}}}\,{\text{|}}\,{{s}_{k}}) = \left\{ \begin{gathered} 1\quad {\text{при}}{{\quad }_{{k + 1}}}\; = {{s}_{k}}, \hfill \\ 0\quad {\text{при}}\quad {{s}_{{k + 1}}} \ne {{s}_{k}}, \hfill \\ \end{gathered} \right.$(3.2)
${{q}_{k}}(1\,{\text{|}}\,3) = {{q}_{k}}(2\,{\text{|}}\,3) = d,\quad {{q}_{k}}(3\,{\text{|}}\,1) = {{q}_{k}}(3\,{\text{|}}\,2) = g,$Представим математическую модель изменения дальностей, углов пеленга и угловых скоростей линии визирования до Ц и до П, также спектральных (λ) и геометрических (σ) информационных различительных признаков и всех их измеряемых значений уравнениями [3]
(3.3)
$\begin{gathered} D_{{k + 1}}^{j} = {{[{{D}^{j}} - \Delta tv + {{\xi }^{{Dj}}}]}_{k}},\quad j = {\text{Ц,П}};\quad D_{0}^{{\text{Ц}}} \ne D_{0}^{{\text{П}}}, \\ \varepsilon _{{k + 1}}^{j} = {{[{{\varepsilon }^{j}} + \Delta t{{\omega }^{j}}]}_{k}},\quad \varepsilon _{0}^{{\text{Ц}}} \ne \varepsilon _{0}^{{\text{П}}}, \\ \omega _{{k + 1}}^{j} = {{\left[ {{{\omega }^{j}} + \frac{{\Delta t}}{\tau }(2{{\omega }^{j}} + u + {{w}^{j}} + {{\xi }^{{\varepsilon j}}})} \right]}_{k}},\quad \omega _{0}^{{\text{Ц}}} \ne \omega _{0}^{{\text{П}}}, \\ \end{gathered} $(3.4)
$\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} _{k}^{i} = [{{D}^{j}} + {{\zeta }^{{Dj}}}{{]}_{k}}[1 - \delta ({{s}_{k}},3)],\quad \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } _{k}^{i} = [{{\varepsilon }^{j}} + {{\zeta }^{{\varepsilon j}}}{{]}_{k}}[1 - \delta ({{s}_{k}},3)],$(3.5)
$\pi (\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\lambda } _{k}^{i}\,{\text{|}}\,{{\lambda }^{j}}),\quad \pi (\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma } _{k}^{i}\,{\text{|}}\,{{\sigma }^{j}});\quad i = 1,{\kern 1pt} 2;\quad j = {\text{Ц,П}}{\text{.}}$Здесь символом ˘ обозначены измеряемые значения соответствующих переменных: $D_{k}^{j}$ – дальности БПЛА до Ц и до П; $\varepsilon _{k}^{j}$ – углы пеленга Ц и П; $\omega _{k}^{j}$ – скорости изменения углов пеленга; ${{u}_{k}}$ – сигнал управления БПЛА; $w_{k}^{j}$ – известные детерминированные функции $k$; $\xi _{k}^{{Dj}}$, $\xi _{k}^{{\varepsilon j}}$ – возмущения – последовательности независимых случайных величин с нулевыми математическими ожиданиями и с дисперсиями соответственно ${{G}^{{Dj}}}$ и ${{G}^{{\varepsilon j}}}$; ${{{v}}_{k}}$ – априорная оценка скорости сближения БПЛА с объектами – известная функция времени; $\zeta _{k}^{{Dj}}$, $\zeta _{k}^{{\varepsilon j}}$ – ошибки измерений – последовательности независимых случайных величин с нулевыми математическими ожиданиями и с дисперсиями соответственно ${{Q}^{{Dj}}}$, ${{Q}^{{\varepsilon j}}}{\text{/}}{{(\tau _{k}^{j})}^{2}}$; $\tau _{k}^{j} = D_{k}^{j}{\text{/}}{{{v}}_{k}}$ – время, оставшееся до конца наведения БПЛА соответственно на цель и на помеху.
Символ Кронекера
Как видно из выражений для дисперсий ошибок измерения углов пеленга, они обратно пропорциональны квадратам дальностей до Ц и до П. Это объясняется тем, что в активных и полуактивных радиолокационных системах, а также в корреляционных оптико-электронных системах ошибки измерения угла пеленга – так называемое “блуждание центра отражения” – зависят от линейного размера объекта [12].
Информационно-управляющий алгоритм, согласно (2.1)–(2.12), с учетом (3.1) имеет следующий вид.
Классификатор структуры:
(3.6)
${{\hat {p}}_{k}}({{s}_{k}}) = \frac{{{{\vartheta }_{k}}({{s}_{k}})}}{{\sum\limits_{{{s}_{k}}} {{\vartheta }_{k}}({{s}_{k}})}},\quad x{{\hat {p}}_{0}}({{s}_{0}}) = \left\{ \begin{gathered} 0.5\quad {\text{ при}}\quad {{s}_{0}} = 1,2, \hfill \\ 0\quad {\text{при}}\quad {{s}_{0}} = 3, \hfill \\ \end{gathered} \right.$(3.7)
$\begin{gathered} {{\vartheta }_{k}}(1) = {{\left[ {\tilde {p}(1){\kern 1pt} {{\pi }^{\lambda }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\lambda } }}^{1}}\,{\text{|}}\,{{\lambda }^{{\text{Ц}}}}){\kern 1pt} {{\pi }^{\sigma }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma } }}^{1}}\,{\text{|}}\,{{\sigma }^{{\text{Ц}}}}){\kern 1pt} {{\pi }^{\lambda }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\lambda } }}^{2}}\,{\text{|}}\,{{\lambda }^{{\text{П}}}}){\kern 1pt} {{\pi }^{\sigma }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma } }}^{2}}\,{\text{|}}\,{{\sigma }^{{\text{П}}}}){\kern 1pt} {{e}^{{ - \Delta (1)}}})} \right]}_{k}}, \\ {{\vartheta }_{k}}(2) = {{\left[ {\tilde {p}(2){\kern 1pt} {{\pi }^{\lambda }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\lambda } }}^{1}}\,{\text{|}}\,{{\lambda }^{{\text{П}}}}){\kern 1pt} {{\pi }^{\sigma }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma } }}^{1}}\,{\text{|}}\,{{\sigma }^{{\text{П}}}}){\kern 1pt} {{\pi }^{\lambda }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\lambda } }}^{2}}\,{\text{|}}\,{{\lambda }^{{\text{Ц}}}}){\kern 1pt} {{\pi }^{\sigma }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma } }}^{2}}\,{\text{|}}\,{{\sigma }^{{\text{Ц}}}}){\kern 1pt} {{e}^{{ - \Delta (2)}}})} \right]}_{k}}, \\ {{\vartheta }_{k}}(3) = {{{\tilde {p}}}_{k}}(3); \\ \end{gathered} $(3.8)
$\begin{gathered} {{\Delta }_{k}}(1) = \frac{1}{2}\left[ {{{{[{{K}^{D}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }}^{1}} - {{{\hat {D}}}^{{\text{Ц}}}})]}}^{2}} + {{{[{{K}^{\varepsilon }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{1}} - {{{\hat {\varepsilon }}}^{{\text{Ц}}}})]}}^{2}} + {{{[{{K}^{D}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }}^{2}} - {{{\hat {D}}}^{{\text{П}}}})]}}^{2}} + {{{\left. {{{{[{{K}^{\varepsilon }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{2}} - {{{\hat {\varepsilon }}}^{{\text{П}}}})]}}^{2}}} \right]}}_{k}},} \right. \\ {{\Delta }_{k}}(2) = \frac{1}{2}\left[ {{{{[{{K}^{D}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }}^{1}} - {{{\hat {D}}}^{{\text{П}}}})]}}^{2}} + {{{[{{K}^{\varepsilon }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{1}} - {{{\hat {\varepsilon }}}^{{\text{П}}}})]}}^{2}} + {{{[{{K}^{D}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }}^{2}} - {{{\hat {D}}}^{{\text{Ц}}}})]}}^{2}} + } \right.{{\left. {{{{[{{K}^{\varepsilon }}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{2}} - {{{\hat {\varepsilon }}}^{{\text{Ц}}}})]}}^{2}}} \right]}_{k}}, \\ {{\Delta }_{k}}(3) = 0; \\ \end{gathered} $(3.9)
$\begin{gathered} {{{\tilde {p}}}_{{k + 1}}}(1) = {{{\hat {p}}}_{k}}(1) + d{\kern 1pt} {{{\hat {p}}}_{k}}(3), \\ {{{\tilde {p}}}_{{k + 1}}}(2) = {{{\hat {p}}}_{k}}(2) + d{\kern 1pt} {{{\hat {p}}}_{k}}(3), \\ {{{\tilde {p}}}_{{k + 1}}}(3) = g[{{{\hat {p}}}_{k}}(1) + {{{\hat {p}}}_{k}}(2)] + (1 - 2d){{{\hat {p}}}_{k}}(3). \\ \end{gathered} $Идентификатор структуры:
(3.10)
${{\hat {s}}_{k}} = arg\mathop {\max }\limits_{{{s}_{k}}} {{\hat {p}}_{k}}({{s}_{k}}),\quad {{s}_{k}} = \overline {1,3} .$Фильтр дальности:
(3.11)
$\begin{gathered} \hat {D}_{{k + 1}}^{j} = {{[{{{\tilde {D}}}^{j}} + (1 - \delta (\hat {s},3)){{K}^{{Dj}}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }}^{{i(\hat {s})}}} - {{{\tilde {D}}}^{j}})]}_{{k + 1}}}, \\ \tilde {D}_{{k + 1}}^{j} = {{[{{{\hat {D}}}^{j}} - \Delta t{v}]}_{k}}. \\ \end{gathered} $Фильтр углов пеленга:
(3.12)
$\begin{gathered} \hat {\varepsilon }_{{k + 1}}^{j} = {{[{{{\tilde {\varepsilon }}}^{j}} + (1 - \delta (\hat {s},3)){{K}^{{\varepsilon j}}}({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{{i(\hat {s})}}} - {{{\tilde {\varepsilon }}}^{j}})]}_{{k + 1}}}, \\ \tilde {\varepsilon }_{{k + 1}}^{j} = {{[{{{\hat {\varepsilon }}}^{j}} - \Delta t{{{\hat {\omega }}}^{j}}]}_{k}}. \\ \end{gathered} $Фильтр угловых скоростей пеленга:
(3.13)
$\begin{gathered} \hat {\omega }_{{k + 1}}^{j} = {{[{{{\tilde {\omega }}}^{j}} + (1 - \delta (\hat {s},3))({{K}^{{\omega j}}} + {{K}^{{\varepsilon j}}}{{\tau }^{{ - 1}}})({{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }}^{{i(\hat {s})}}} - {{{\tilde {\varepsilon }}}^{j}})]}_{{k + 1}}}, \\ \tilde {\omega }_{{k + 1}}^{j} = {{[{{{\hat {\omega }}}^{j}} + \Delta t{{\tau }^{{ - 1}}}(2{{{\hat {\omega }}}^{j}} + u{\kern 1pt} * + {{w}^{j}})]}_{k}}, \\ \end{gathered} $При $j = {\text{Ц}}$
(3.14)
$i = \left\{ \begin{gathered} 1\quad {\text{при}}\quad {{{\hat {s}}}_{k}} = 1, \hfill \\ 2\quad {\text{при}}\quad {{{\hat {s}}}_{k}} = 2, \hfill \\ \end{gathered} \right.$при $j = {\text{П}}$
(3.15)
$i = \left\{ \begin{gathered} 1\quad {\text{при}}\quad {{{\hat {s}}}_{k}} = 2, \hfill \\ 2\quad {\text{при}}\quad {{{\hat {s}}}_{k}} = 1. \hfill \\ \end{gathered} \right.$В формулах (3.11)–(3.13): $u_{k}^{{^{*}}}$ – оптимальное управление БПЛА, зависящее от оценок координат цели (см. блок Регулятор), $K_{k}^{{\beta j}}$ – так называемый коэффициент доверия, $\beta = D,\varepsilon ,\omega $; j = Ц, П (см. блок Дисперсиометр).
Как видно из рисунка, расстояние ${{L}_{k}}$ между соседними БПЛА определяется как
(3.16)
${{\hat {L}}_{k}} = {{[{{\hat {D}}^{{{\text{Ц}}1}}}sin{{\hat {\varepsilon }}^{{{\text{Ц}}1}}} - {{\hat {D}}^{{{\text{Ц}}2}}}sin{{\hat {\varepsilon }}^{{{\text{Ц}}2}}}]}_{k}}.$Дисперсиометр. Алгоритм дисперсиометра состоит из формул для коэффициентов $K_{k}^{{\beta j}}$, полученных в результате решений уравнений (2.10)–(2.12) для ${{\hat {R}}_{k}}$ в установившемся режиме (т.е. при ${{\hat {R}}_{{k + 1}}} = {{\hat {R}}_{k}} = \hat {R}$) [3]:
(3.17)
${{K}^{{Dj}}} = \Delta {{\omega }^{j}}\left( {\sqrt {1 + \frac{{{{G}^{{Dj}}}}}{{{{Q}^{{Dj}}}}}} - 1} \right),\quad {{K}^{{\varepsilon j}}} = \sqrt {2{{K}^{{\omega j}}}} ,\quad {{K}^{{\omega j}}} = \sqrt {\frac{{{{G}^{{\omega j}}}}}{{{{Q}^{{\omega j}}}}}} ,\quad j = {\text{Ц,П}},$Как видно из (3.16), чем меньше дисперсия ошибки измерения ${{Q}^{{\beta j}}}$ ($\beta = D,\;{\kern 1pt} \varepsilon ,{\kern 1pt} \;\omega $; j = Ц, П), тем больше коэффициент доверия ${{K}^{{\beta j}}}$ и тем самым, как следует из (3.11)–(3.13), меньше разность между оценкой ${{\hat {X}}_{k}}$ и измерением ${{Z}_{k}}$ (${{\hat {X}}_{k}} = \hat {D}_{k}^{j},\varepsilon _{k}^{j},\hat {\omega }_{k}^{j}$; ${{Z}_{k}} = {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{D} }_{k}},{{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\varepsilon } }_{k}}$).
Регулятор. Регулятор – это закон управления движением БПЛА. В зависимости от конкретной задачи (типы и характеристики объектов и БПЛА и другие условия наведения) закон управления может иметь тот или иной вид из перечня известных стандартных методов наведения. Например, можно применить закон управления, задаваемый формулой [3]
(3.18)
$u_{k}^{{^{*}}} = - {{\left[ {\frac{{{{c}^{\varepsilon }}}}{\tau }({{{\hat {\varepsilon }}}^{{\text{Ц}}}} - \bar {\varepsilon }) + {{c}^{\omega }}({{{\hat {\omega }}}^{{\text{Ц}}}} - \bar {\omega }) + {{c}^{L}}(\hat {L} - \bar {L}) + {{c}^{{v}}}({\hat {v}} - {\bar {v}})} \right]}_{k}},$В целом, информационно-управляющий алгоритм каждого из соседних взаимодействующих БПЛА описывается замкнутой системой рекуррентных уравнений (3.6)–(3.18).
Заключение. Представлены взаимосвязанные информационно-управляющие алгоритмы соседних участников группы БПЛА, наводящихся на группу объектов, часть из которых – ложные цели, создаваемые с помощью имитационных помех. Кроме того, противодействие осуществляется путем постановки маскирующих помех, приводящих к перерывам информации в системах управления.
Алгоритмы, основанные на теории систем со случайной скачкообразной структурой [3, 5–11], осуществляют распознавание помеховых ситуаций, оценивание координат объектов и соседних участников группы БПЛА и управление БПЛА, обеспечивающее требуемые точность наведения и дистанцию между соседними БПЛА.
Приведен пример наведения двух соседних взаимодействующих БПЛА на одну и ту же цель, прикрываемую одной имитационной помехой, которая дезориентирует систему управления БПЛА, и маскирующей помехой, вызывающей перерывы информации в двух каналах наблюдения. В каждом из информационных каналов измеряются координаты объектов – дальности и углы пеленга, а также спектральные и геометрические различительные признаки наблюдаемых объектов.
Представлены взаимосвязанные информационно-управляющие алгоритмы двух соседних участников группы БПЛА.
Список литературы
Баханов Л.Е., Давыдов А.Н., Корниенко В.Н. и др. Системы управления вооружением истребителей. Основы интеллекта многофункционального самолета / Под ред. Федосова Е.А. М.: Машиностроение, 2005.
Себряков Г.Г., Красильщиков М.Н. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий. М.: Физматлит, 2003.
Бухалëв В.А., Скрынников А.А., Болдинов В.А. Алгоритмическая помехозащита беспилотных летательных аппаратов. М.: Физматлит, 2018.
Бухалëв В.А. Обработка информации и управление ракетами в условиях противодействия. М.: Изд-во Военно-воздушной акад. им. проф. Н.Е. Жуковского и Ю.А. Гагарина, 2009.
Евдокименков В.Н., Красильщиков М.Н., Оркин С.Д. Управление смешанными группами пилотируемых и беспилотных летательных аппаратов в условиях единого информационно-управляющего поля. М.: Изд. МАИ, 2015.
Бухалëв В.А. Распознавание, оценивание и управление в системах со случайной скачкообразной структурой. М.: Наука, 1996.
Бухалëв В.А., Скрынников А.А., Болдинов В.А. Игровое управление системами со случайной скачкообразной структурой. М.: Физматлит, 2021.
Бухалёв В.А., Скрынников А.А., Болдинов В.А. Системы со случайной скачкообразной структурой. М.: ИД Академии Жуковского, 2022.
Piers B.D., Sworder D.D. Bayes and Minimax Controllers for a Linear Systems for Stochastic Jump Parameters // IEEE Trans. AC-16. 1971. № 4. P. 677–685.
Kazakov Y.E., Artemiev V.M., Bukhalev V.A. Principles of the Construction on Complex Algoritms for Information Processing and Control in System with Stochastic Exchange Structure // II IFAC Sympos on Stochastic Control. Tallinn, 1986. Pt 1.
Moon J. A Sufficient Condition for Linear-Quadratic Stochastic Zero-Sum Differential Games for Markov Jump Systems // IEEE Trans. Autom. Control. 2019. V. 64. № 4. P. 1619–1626.
Mariton M. Jump Linear Systems in Automatic Control. N.Y.: CRC Press, 1990.
Kats I.Ya., Martynyuk A.A. Stability and Stabilization of Nonlinear Systems with Random Structures. CRC Press, 2003.
Дудник П.И., Чересов Ю.А. Авиационные радиолокационные устройства. М.: ВВИА им. Н.Е. Жуковского, 1986.
Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. М.: Мир, 1974.
Патрик Э. Основы теории распознавания образов. М.: Сов. радио, 1980.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления