

Известия РАН. Теория и системы управления, 2022, № 6, стр. 161-176
ПРИМЕНЕНИЕ КАРКАСНЫХ ГЕОМЕТРИЧЕСКИХ МОДЕЛЕЙ ДЛЯ УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ КОСМИЧЕСКИХ ОБЪЕКТОВ
Ю. Ф. Голубев a, *, В. М. Мирхайдаров b, А. В. Яскевич b, **
a ИПМ им. М.В. Келдыша РАН
Москва, Россия
b РКК “Энергия”
Королев, Россия
* E-mail: golubev@keldysh.ru
** E-mail: Andrey.Yaskevich@rsce.ru
Поступила в редакцию 30.06.2022
После доработки 14.07.2022
Принята к публикации 01.08.2022
- EDN: FYWOUU
- DOI: 10.31857/S0002338822060099
Аннотация
Описываются результаты оценки с помощью компьютерного моделирования в реальном времени динамики соединения космическим манипулятором объектов с использованием стыковочных устройств малого размера. Из-за ограниченной видимости этих устройств с помощью телекамер дополнительно применяются геометрические каркасные модели, отображающие их относительное положение и контактное взаимодействие. Они облегчают оператору манипулятора процедуру управления.
Введение. Первые стыковки космических аппаратов (КА) к международной космической станции с помощью манипулятора были выполнены в сентябре 2009 г. (японский грузовой корабль HTV [1]) и в мае 2010 г. (российский модуль МИМ-1 [2]). В последующем таким способом неоднократно были присоединены грузовые корабли Dragon [3]. В англоязычной специальной литературе операции такого типа получили название “причаливание” (berthing). Далее для краткости используется этот термин. Для причаливания характерно включение в контур управления манипулятором человека-оператора, который выполняет наведение, т.е. выдает команды на выравнивание стыковочных агрегатов (СтА) и их сближение вплоть до первичного соединения (сцепки). Для этого он использует изображения мишени с прицельной телекамеры и стыкуемых объектов с обзорных телекамер. Окончательное жесткое соединение КА после сцепки осуществляется стыковочными агрегатами [4, 5]. Они создают переходный тоннель, имеют достаточно большие диаметры и соответствующие размеры направляющих элементов для компенсации промахов. Прицельная телекамера и мишень могут быть установлены на поверхности стыкуемых КА недалеко от оси их сближения. Все это облегчает оператору манипулятора задачу наведения. Обзорные телекамеры размещаются на орбитальной станции (ОС), к которой выполняется причаливание, на некотором расстоянии от места соединения.
В процессе обслуживания ОС может потребоваться установка на ее поверхности оборудования, доставленного на ранее состыкованном КА. Стыковочные устройства для соединения такого доставляемого оборудования могут иметь малые размеры, простую кинематическую схему и могут практически не обладать податливостью. Присоединяемые к ОС объекты не всегда образуют с ней переходный тоннель. В этом случае места их установки могут не позволить применять прицельную телекамеру и мишень и даже затруднить доступ к устройствам соединения для операторов, работающих на поверхности станции.
Для возможности безошибочного выполнения операций причаливания с помощью манипулятора необходимо обеспечить отработку способов управления и тренировку операторов. Если устройства соединения обладают податливостью, то для оценки возможности достижения их надежной сцепки может быть использован метод гибридного моделирования, описанный, например, в [6, 7]. Однако для регулярной тренировки операторов его применение слишком расточительно из-за ограниченного ресурса и сравнительно больших затрат на эксплуатацию технически сложного гибридного стенда. В том случае, когда устройства соединения КА имеют простую кинематику, выполняется математическое моделирование причаливания в реальном времени на компьютерных стендах [8–10], которое обеспечивает и отработку процедуры управления, и надлежащую тренировку операторов.
В статье описывается метод компьютерного моделирования в реальном времени причаливания, которое выполняется с помощью стыковочных устройств малого размера. Его отличительной чертой является применение каркасных геометрических моделей для отображения относительного положения, контактного взаимодействия таких устройств с целью облегчения оператору манипулятора управления наведением при их соединении. Отработка процедуры управления и тренировка операторов в наземных условиях осуществляется на компьютерном стенде. Для поддержания навыков управления в ходе полета разработаны программы, которые на двух бортовых лэптопах обеспечивают моделирование причаливания и отображение каркасных моделей.
Применение каркасных геометрических моделей элементов сцены помимо существенной экономии вычислений при определении событий контактного взаимодействия оставляет объекты прозрачными. Это дает оператору возможность учета подробностей процесса причаливания без помех, создаваемых затенением реальных объектов. В статье предполагается, что причаливаемый объект уже находится в схвате манипулятора. Вопрос о взятии манипулятором требуемого объекта представляет собой отдельную задачу и в данной работе не рассматривается.
1. Применение каркасных геометрических моделей стыковочных устройств при моделировании причаливания. Контактное взаимодействие стыковочных устройств почти всегда недоступно для непосредственного наблюдения из-за их относительно малых размеров, ограниченной видимости, невозможности установить телевизионную камеру непосредственно в зоне контактов. Взаимное положение контактирующих элементов оценивается косвенно, например, с помощью мишени и прицельной телекамеры.
При математическом моделировании контактирующие поверхности описываются наборами геометрических примитивов, для каждой взаимодействующей пары которых имеется вычислительно эффективное аналитическое решение. Сложные поверхности аппроксимируются множествами примитивов, которые позволяют быстро определить потенциальную точку контакта методом дихотомии [11].
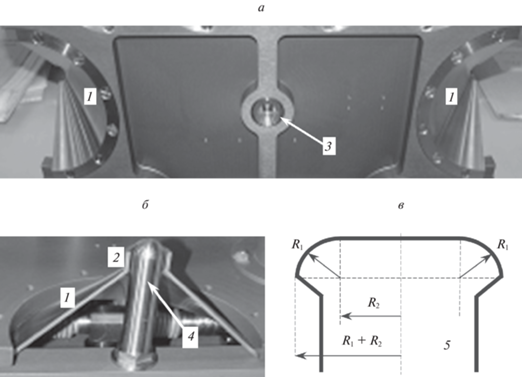
Например, для установки на поверхность ОС доставляемого оборудования могут быть использованы активные и пассивные стыковочные устройства без заметной податливости, например, показанные на рис. 1. Устройство соединения пассивное (УСП). Оно установлено на поверхности ОС, содержит две направляющих поверхности в виде фрагментов конуса 1 с приемными гнездами 2 и приемное гнездо фиксации 3 в форме цилиндра с входной частью в виде усеченного конуса (рис. 1,а и 1,б). Внутри цилиндра находится подпружиненный шариковый замок. Устройство соединения активное (УСА), на стыкуемом объекте имеет два направляющих штыря 4 с торцами сферической формы, которые должны контактировать с коническими выравнивающими поверхностями 1 и гнездами 2 УСП, и замок фиксации 5 с торцевой поверхностью в виде фрагмента тора (рис. 1,в), который должен входить в гнездо фиксации 3 УСП.
Рис. 1.
Направляющие элементы стыковочных устройств без податливости: а – гнездо фиксации; б – направляющие штырь и конус; в – геометрия замка фиксации
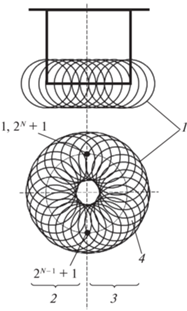
Тороидальная поверхность 1 замка фиксации (рис. 2) в модели контактного взаимодействия разбивается на секторы 2 и 3, аппроксимированные наборами сфер 4. Оба сектора имеют выпуклую форму, и это делает возможным применение метода дихотомии, с помощью которого за $N$ итераций определяется образующая сфера с максимальным расстоянием от ее центра до оси гнезда фиксации, если индексы сфер 4 в секторах 2 и 3 изменяются соответственно в пределах $\overline {1,\,{{2}^{{N - 1}}} + 1} $ и $\overline {{{2}^{{N - 1}}} + 1,{{2}^{N}} + 1} $. Далее проверяется возможность контакта выделенной таким образом сферы и гнезда фиксации с использованием пар геометрических примитивов “сфера–усеченный конус”, “сфера–окружность”, “сфера–цилиндр”. Для этих пар вычисляется величина взаимного внедрения. Если она положительна, то определяются параметры точки контакта.
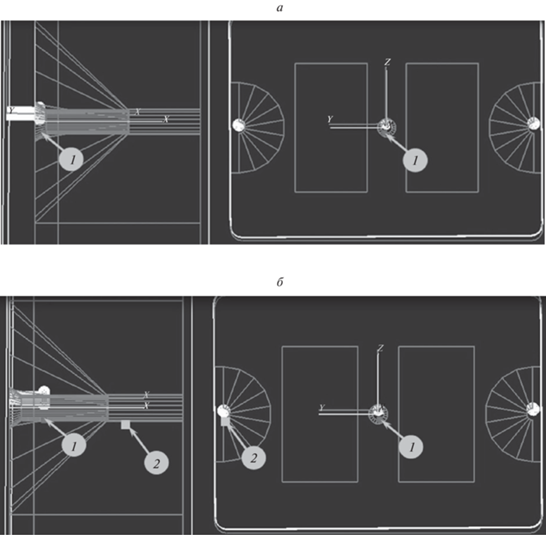
Сферическая торцевая поверхность каждого направляющего штыря 4 может контактировать с соответствующей направляющим конусом 1, с граничной окружностью приемного гнезда и цилиндром гнезда 2 (рис. 3,а). Контакт цилиндрической поверхности штыря 4 с цилиндром гнезда 2 не рассматривается, так как он имеет место только после того, как замок фиксации 5 войдет в цилиндрическую часть гнезда фиксации 3 (рис. 3,б).
Рис. 3.
Контакты направляющего штыря с приемным конусом (а); замка фиксации и цилиндра гнезда фиксации (б)
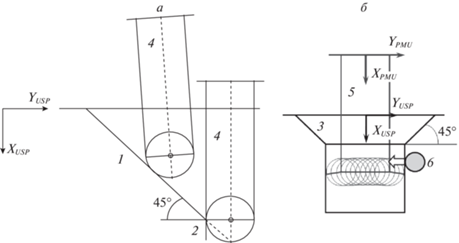
Начало системы координат (СК) ${{X}_{{USP}}}{{Y}_{{USP}}}{{Z}_{{USP}}}$ расположено в центре приемного гнезда на стыковочной плоскости УСП, а СК ${{X}_{{PMU\,}}}{{Y}_{{PMU\,}}}{{Z}_{{PMU}}}$ – в основании замка захвата на стыковочной плоскости УСА. Направления перемещений в отдельных командах управления манипулятором задаются в СК ${{X}_{{PMU\,}}}{{Y}_{{PMU\,}}}{{Z}_{{PMU}}}$.
Сцепка достигается, когда этот замок войдет в гнездо на глубину, достаточную для выхода подпружиненного ролика 6 за его торцевую поверхность. Так как замок в гнезде может двигаться только вдоль оси цилиндра, то сопротивление ролика моделируется наличием односторонней контактной силы, действующей вдоль оси XUSP. Жесткое соединение УСА и УСП после их сцепки обеспечивается дополнительными замками, которые приводятся в действие вручную внешними операторами. Управляемое движение манипулятора при этом отсутствует, поэтому такой этап причаливания не моделируется.
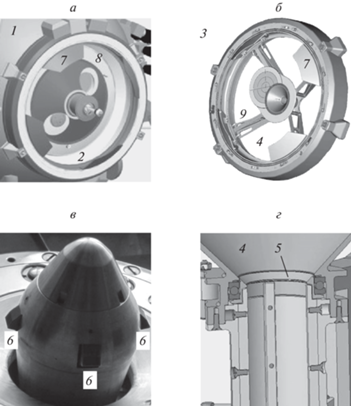
В ряде случаев присоединяемое к ОС оборудование должно образовывать с ней переходный тоннель, необходимый для выполнения различных технологических операций. Он формируется при жестком соединении активного и пассивного специализированных стыковочных СтА, пример конструкции которых приведен на рис. 4. Для сцепки в активном агрегате 1 используется очень простой, без устройств демпфирования стыковочный механизм (СтМ) типа “штырь” с головкой захвата, а в пассивном агрегате 3 – приемный конус 4 с гнездом и упором 5. Штырь 2 связан с основанием механизма универсальным шарниром, его малые угловые перемещения ограничены жесткими тарельчатыми пружинами. Головка захвата на его конце имеет четыре защелки 6, которые при попадании в гнездо приемного конуса проходят за упор 5, образуя первичное соединение – сцепку. После сцепки привод СтМ втягивает штырь, в результате этого совмещаются плоскости агрегатов. При этом устранение углового рассогласования относительно продольной оси осуществляется за счет контактов направляющих лепестков 7. После совмещения плоскостей жесткое соединение СтА обеспечивается их механизмами герметизации. Агрегаты имеют диаметр значительно больше, чем размеры стыковочных устройств, которые используются для причаливания, и внутри них имеется место для установки прицельной телекамеры и мишени. При наведении через иллюминатор 8 активного агрегата с помощью прицельной телекамеры можно наблюдать мишень 9 на пассивном агрегате.
Рис. 4.
Активный и пассивный агрегаты для выполнения причаливания: а – активный СтА; б – пассивный СтА; в – головка захвата СтМ; г – гнездо приемного конуса
Моделирование причаливания завершается после образования сцепки. Тогда исполнительный механизм манипулятора приводится в расслабленное состояние. Следовательно, головка захвата СтМ и приемный конус с гнездом пассивного агрегата являются основными направляющими элементами при расчете контактного взаимодействия.
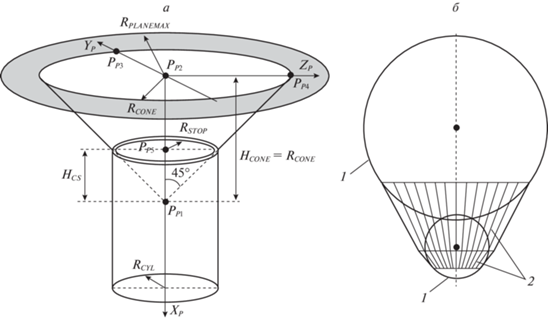
При моделировании приемный конус с гнездом (рис. 5) описывается набором характерных точек и геометрическими примитивами: усеченным конусом, цилиндром, окружностями и плоскостью. Точка ${{P}_{{P,1}}}$ – вершина приемного конуса, точки ${{P}_{{P,2}}} - {{P}_{{P,4}}}$ задают плоскость, которая ограничивает движение головки захвата при боковых промахах за пределами конуса; ${{P}_{{P,5}}}$ – центр входной плоскости премного гнезда. Постоянными параметрами являются: ${{R}_{{CONE}}}$ – радиус входной грани приемного конуса, ${{R}_{{STOP}}}$ – радиус механического упора на входе гнезда, ${{H}_{{CS}}}$ – расстояние от вершины конуса до плоскости упора, ${{H}_{{CONE}}}$ – высота приемного конуса, ${{R}_{{PlaneMax}}}$ – радиус окружности плоскости за пределами входной грани приемного конуса.
Рис. 5.
Геометрические примитивы для представления: а – приемного конуса пассивного СтА; б – головки захвата СтМ
Форма головки захвата штыря описывается двумя сферами 1 и двумя наборами отрезков 2 прямых линий, аппроксимирующих поверхности двух усеченных конусов. Для итерационного поиска точек контакта методом дихотомии поверхность каждого конуса разбивается на два сектора, у которых крайние образующие совпадают. Общее число аппроксимирующих образующих – отрезков прямых равно ${{2}^{N}} + 1$. За N итераций определяется отрезок, точка пересечения которого с плоскостью окружности (геометрического примитива пассивного агрегата) наиболее удалена от центра этой окружности. Разбиение конусов на секторы обеспечивает выпуклость их поверхностей и соответственно однозначность такого определения. Форма каждой защелки описывается плоской фигурой – набором из трех отрезков, соединяющих ее характерные точки (ХТ).
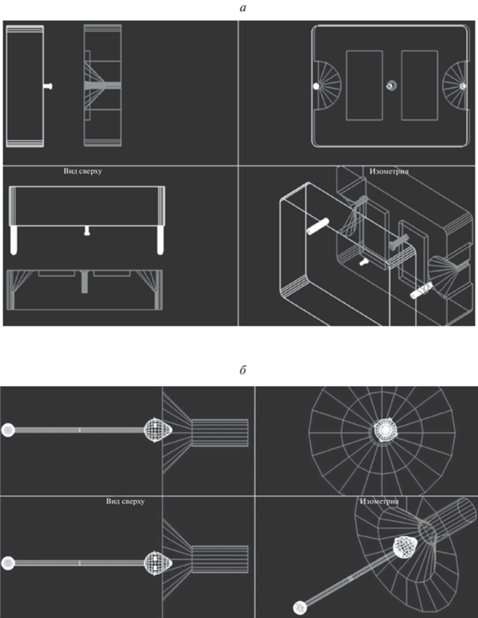
Описание контактирующих поверхностей с помощью геометрических примитивов является основой для разработки компьютерных каркасных моделей устройств соединения. Их прозрачность, в отличие от обычных объемных моделей компьютерной графики, позволяет отображать и наблюдать все детали взаимодействия и точки контакта. Элементы таких моделей – геометрические примитивы контактирующих поверхностей, а также дополнительные точки и линии, обозначающие характерные детали формы устройств соединения. Компьютерные каркасные геометрические модели для визуализации контактного взаимодействия описанных выше стыковочных устройств показаны на рис. 6. Изображение в трех проекциях и аксонометрии облегчают анализ контактного взаимодействия. Их размеры в пределах окна могут быть оперативно изменены с помощью “мыши” или управляющих клавиш компьютера.
Рис. 6.
Каркасные геометрические модели для визуализации контактного взаимодействия стыковочных устройств: а – без податливости; б – с податливым штырем
2. Моделирование причаливания и управление манипулятором с использованием каркасных геометрических моделей. Компьютерный стенд для наземной отработки процедуры управления манипулятором при причаливании был создан в Ракетно-космической корпорации “Энергия” совместно с МГТУ им. Н.Э. Баумана [12]. Его упрощенная схема приведена на рис. 7.
Рис. 7.
Упрощенная схема компьютерного стенда моделирования в реальном времени причаливания космических объектов

Манипулятор, применяемый для причаливания, работает в супервизорном режиме управления, при котором оператор с помощью пульта задает команды на линейные или угловые перемещения активного стыковочного устройства относительно одной из осей системы координат, связанной с пассивным устройством. Команды на перемещения преобразуются в управляющие сигналы на приводы. Модель 1 пульта управления в составе стенда, как и ее оригинал, представляет собой лэптоп, позволяющий оператору задавать команды в диалоговом режиме. Уравнения движения манипулятора и перемещаемого им объекта с учетом динамики приводов и контактного взаимодействия стыковочных устройств интегрируется на компьютере 2, который также выполняет расчет относительного положения элементов каркасной геометрической модели 3 и координат активного стыкуемого космического объекта относительно пассивного. Компьютер 4 на основе этих координат и трехмерных геометрических моделей объектов средствами компьютерной графики генерирует изображения 5 обзорных и прицельной телекамер. Все компьютеры объединены сетью Ethernet с помощью коммутатора 6 портов и обмениваются данными по технологии “клиент-сервер”. Роль сервера выполняет компьютер 2.
При причаливании в супервизорном режиме управления сначала выполняется выравнивание, т.е. с помощью команд Step задаются боковые и угловые перемещения для уменьшения соответствующих рассогласований. После этого командой Insert инициируется осевое перемещение (сближение) стыковочных устройств, которое должно завершиться их сцепкой. Жесткое соединение объектов после сцепки не моделируется, оно выполняется либо внешними операторами, либо приводами специализированных стыковочных агрегатов. Величины и скорости перемещений являются фиксированными параметрами команд управления. Скорости определяются разработчиком манипулятора в зависимости от инерционных характеристик перемещаемого объекта. Величины перемещений выбираются на этапе отработки процедуры управления на моделирующем стенде, в том числе с учетом пожеланий оператора манипулятора. Размер шага перемещения является результатом компромисса, так как его уменьшение улучшает качество прицеливания, но увеличивает время достижения сцепки, которое ограничено из-за того, что процесс причаливания могут сопровождать операторы на внешней поверхности станции. Из-за фиксированной величины перемещений при выравнивании боковые и угловые рассогласования стыковочных устройств в общем случае не могут быть полностью скомпенсированы. К моменту первого контакта они могут незначительно возрасти из-за погрешностей манипулятора.
При управлении манипулятором с помощью рукояток, задающих линейные и угловые скорости перемещений стыкуемого объекта, сцепка может быть достигнута быстрее, но при более высоком уровне тренированности оператора. В данном исследовании моделировался предварительно выбранный манипулятор, управляемый в супервизорном режиме.
Первоначально каркасные модели стыковочных устройств были разработаны и использовались только при наземной отработке причаливания на стенде моделирования в реальном времени. В дальнейшем при проведении тренировок операторов выявилась необходимость их применения для дополнительной (к внешним телекамерам) визуализации при выполнении реальных операций. С этой целью было разработано программное обеспечение (ПО) для расчета относительного положения стыковочных устройств и отображения каркасных моделей на основе решения прямой кинематической задачи для манипулятора. Значения углов в шарнирах берутся из шины обмена данными между компьютером, управляющим манипулятором и компьютером оператора (пультом управления). В ПО дополнительной визуализации моделирование динамики движения манипулятора и стыкуемого объекта не выполняется.
Полученные из конструкторской документации (КД) и используемые в модели движения координаты положения стыковочных устройств на ОС и стыкуемых объектах, а также размеры звеньев манипулятора могут отличаться от реальных. В ПО дополнительной визуализации для конкретных операций причаливания введены координаты стыковочных устройств на поверхности ОС, определенные в результате измерений. Но отклонения от реальных значений других используемых в расчетах размеров, например координат ответных устройств на стыкуемых объектах и длин звеньев манипулятора, могут оставаться неизвестными. Оценка их влияния на возможность достижения сцепки стыковочных устройств малого размера была выполнена на описанном выше стенде моделирования. Для этого все неизвестные на основе измерений отклонения размеров от реальных значений были определены максимальные смещения стыковочных устройств, установленных на поверхности ОС, и введены в модель движения манипулятора и стыкуемого объекта. Однако эти смещения не учитывались в программах стенда для расчета относительного положения используемых для наведения каркасных моделей стыковочных устройств. Таким образом, выравнивание при моделировании причаливания осуществлялось с систематической ошибкой. Полученные результаты представлены ниже.
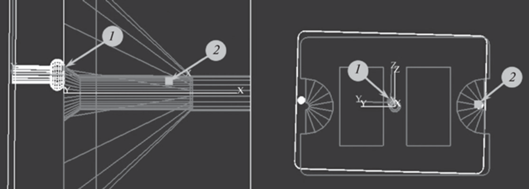
3. Моделирование причаливания оборудования со стыковочными устройствами без податливости. Если при причаливании сцепка обеспечивается стыковочными устройствами малого размера без податливости, то, как правило, в зоне соединения оборудования с ОС невозможно установить мишень и прицельную телекамеру. На компьютерном стенде в реальном времени было промоделировано причаливание, когда выравнивание выполняется оператором манипулятора по голосовым командам внешнего наблюдателя, у которого ограничена видимость соединяемых устройств. Выполняемая после такого выравнивания команда Insert на осевое сближение УСА и УСП закончилась контактом 1 торцевой поверхности замка фиксации УСА со стыковочной плоскостью УСП и контактом 2 одного из направляющих штырей в ответный приемный конус (рис. 8). Команда Insert не предусматривает выполнение боковых перемещений, необходимых для попадания головки захвата в приемный конус гнезда захвата. Поэтому в этом случае сцепка невозможна, необходимо отводить УСА от УСП и повторять причаливание заново.
Рис. 8.
Фрагмент каркасной компьютерной модели, отображающий промах при сближении УСА и УСП вследствие выравнивания в условиях ограниченной видимости
В условиях ограниченной видимости наведение с использованием каркасной модели обеспечивает более высокое качество прицеливания. Это демонстрируют графики изменения кинематических параметров и контактных сил с момента окончательного выравнивания УСА и УСП (на 8-й мин от начала причаливания) до их сцепки (рис. 9, 10). Сначала командами Step задавались фиксированные по величине боковые 1, а затем угловые 2 перемещения. После завершения выравнивания была выдана команда Insert на осевое сближение 3. Фиксированные скорости линейных и угловых перемещений были заданы заранее с учетом инерции стыкуемого объекта и конструктивных особенностей стыковочных устройств. С момента контакта 4 головки захвата с приемным конусом гнезда захвата началась деформация исполнительного механизма манипулятора, в основном за счет податливости приводов в шарнирах. Ее рост сопровождался падением скорости осевого сближения и высокочастотными колебаниями контактной силы 5 из-за “подстройки” модели контактной жесткости. Сила деформации, достигнув величины, достаточной для преодоления сопротивления, обеспечила вхождение головки захвата УСА в цилиндр гнезда захвата УСП.
Рис. 9.
Осевые и боковые скорости и перемещения УСА относительно УСП при выравнивании с помощью каркасной геометрической модели
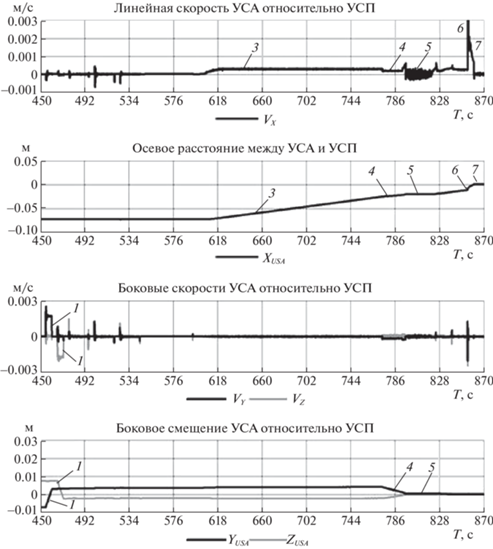
Рис. 10.
Угловые скорости и перемещения УСА относительно УСП при выравнивании с помощью каркасной геометрической модели
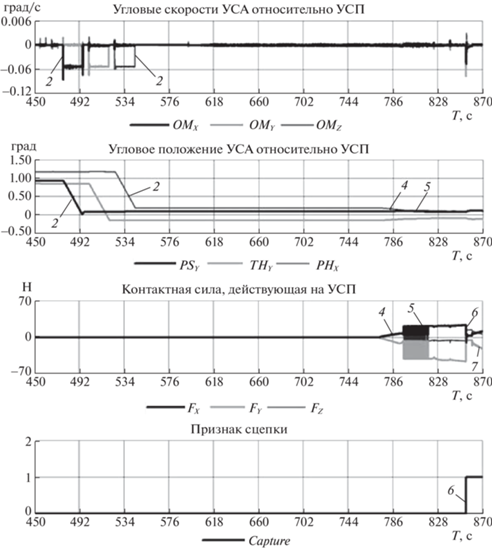
После входа замка в гнездо фиксации контактные реакции определялись деформацией исполнительного механизма манипулятора и силой сопротивления пружины шарика, фиксирующего сцепку. После сцепки 6 это сопротивление уменьшилось и скорость сближения увеличилась из-за освобождения энергии деформации манипулятора. Через малое время произошел контакт 7 стыковочных плоскостей УСА и УСП, скорость сближения упала до нуля, начали расти контактные силы и моменты, обусловленные возрастанием деформации манипулятора. При завершении выполнения команды Insert они не превысили максимально допустимых значений. Сила деформации исполнительного механизма манипулятора, необходимая для проталкивания головки захвата в гнездо, нарастала в течение примерно 1 мин. Все это время стыковочные устройства оставались практически неподвижными относительно друг друга.
Положение точки контакта 1 головки захвата и приемного конуса гнезда захвата на фрагменте каркасной геометрической модели (рис. 11) вычислено по модели движения с размерами, соответствующими КД. Изображение контактного взаимодействия при отличии этих размеров от реальных может иметь вид, показанный на рис. 12. Координаты точки контакта 1 головки захвата с приемным конусом и точки контакта 2 одного из направляющих штырей с ответным приемным цилиндром вычисляются в СК УСП и поэтому находятся на его контактирующих поверхностях. Контактирующие поверхности УСА отображаются не согласованно с ними из-за того, что размеры, используемые для расчета каркасной модели, не соответствуют КД.
Рис. 11.
Отображение контакта головки захвата и приемного конуса гнезда захвата на каркасной геометрической модели (фрагмент)
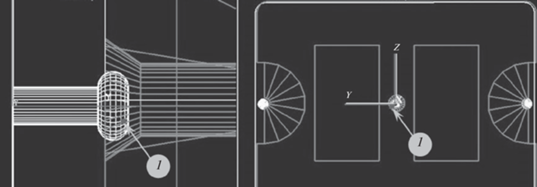
Рис. 12.
Положение точек контакта головки УСА и гнезда УСА при учете отклонений размеров в модели от реальных значений: а – начало взаимодействия; б – после сцепки
В ПО для дополнительной визуализации причаливания точки контакта не вычисляются и на каркасной модели не отображаются, так как не моделируется динамика движения. Оператор манипулятора может наблюдать только рассогласование контактирующих поверхностей. При этом сцепка может считаться достигнутой, если на каркасной модели тороидальная поверхность головки захвата УСА пересекла плоскость входной грани цилиндра гнезда захвата УСП.
Если размеры в модели движения отличаются от реальных, но величины отклонений не превышают внешнего радиуса приемного конуса гнезда захвата, то в результате контактного взаимодействия УСА и УСП сцепка возможна. При этом время, в течение которого сила деформации исполнительного механизма манипулятора достигает величины, необходимой для проталкивания головки в цилиндр приемного гнезда, увеличивается примерно до 2 мин.
Достаточно высокий уровень тренированности оператора манипулятора при причаливании с использованием стыковочных устройств без податливости необходим для того, чтобы время достижения сцепки было приемлемым с учетом ограничения длительности работы внешних операторов, осуществляющих окончательное жесткое соединение УСА и УСП. Высокий уровень тренированности оператор может поддерживать в ходе полета с помощью разработанного ПО.
4. Особенности динамики причаливания устройств с податливостью. Ограниченные пружинами угловые движения штыря СтМ обеспечивают его податливость при контактном взаимодействии с приемным конусом. Это позволило подтвердить принципиальную возможность выполнения причаливания с использованием специализированных СтА методом гибридного моделирования аналогично [7]. Вместе с тем для детального исследования динамики выполнения операции, выбора параметров команд управления манипулятором, а также для тренировки операторов моделирование выполнялось на описанном выше компьютерном стенде с применением компьютерной модели изображения мишени, получаемой с прицельной телекамеры. Изображение плоской мишени малочувствительно к угловым отклонениям агрегатов от оси их сближения (кроме крена). Это приводит к увеличению ошибки наведения с учетом удаленности осей телекамеры и мишени от точки, в которой должна произойти сцепка. Данную особенность иллюстрируют приведенные на рис. 13 и 14 графики изменения кинематических и силовых параметров, полученные при моделировании одного из вариантов причаливания с использованием прицельной телекамеры и мишени.
Рис. 13.
Удаление, боковые промахи пассивного агрегата и контактные реакции при причаливании с выравниванием по изображению мишени
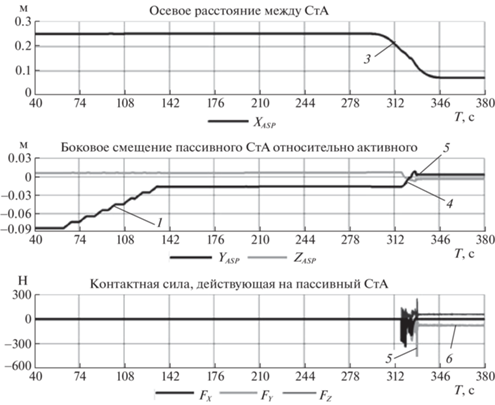
Рис. 14.
Углы и скорости перемещаемого пассивного агрегата при причаливании с выравниванием по изображению мишени
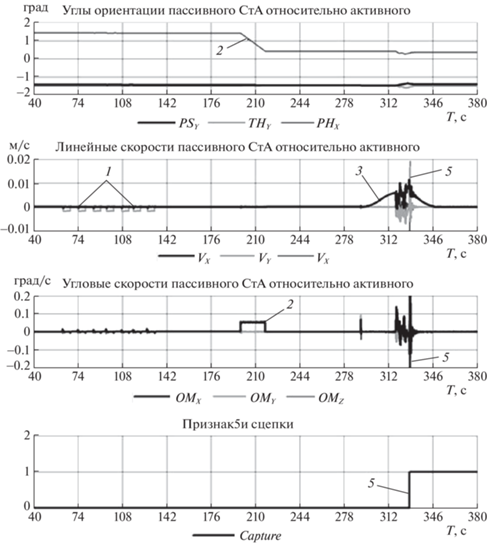
Сначала оператор задает серию 1 из семи команд Step на устранение бокового промаха по оси Z, затем одну команду 2 Step на коррекцию углового разворота относительно продольной оси Х. Другие углы не корректируются из-за слабой чувствительности к ним изображения мишени. При осевом сближении 3 соединяемых устройств компенсация 4 бокового рассогласования головки относительно приемного конуса происходит частично за счет ее разворота, а также вследствие деформации исполнительного механизма манипулятора. Из-за этой деформации после сцепки 5 головка, находящаяся в цилиндре гнезда приемного конуса, продолжает действовать на его боковую стенку с силой 6.
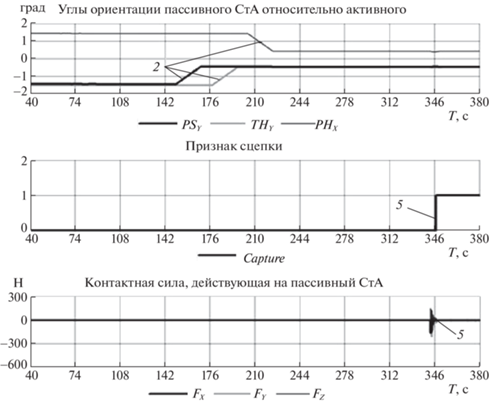
Наведение с использованием компьютерной каркасной модели дает возможность более точной оценки взаимного положения головки штыря и приемного конуса. Благодаря этому при тех же начальных условиях наведения, что и в рассмотренном выше варианте, при выравнивании было выдано большее число команд 1 на боковое перемещение (восемь вместо семи). В результате боковой промах уменьшился практически до нуля (рис. 15). Вследствие большей чувствительности компьютерной каркасной модели к относительному угловому положению соединяемых устройств было выдано три команды 2 на угловое выравнивание (вместо одной), что привело к уменьшению углового рассогласования примерно в 2 раза (рис. 16). Время достижения сцепки 5 увеличилось незначительно, на 17 с. Но вследствие более качественного выравнивания при входе головки в гнездо приемного конуса уменьшилась амплитуда контактных сил, после сцепки манипулятор находился в недеформированном состоянии.
Рис. 15.
Скорости и боковые промахи УСА относительно УСП (выравнивание с использованием каркасной геометрической модели)
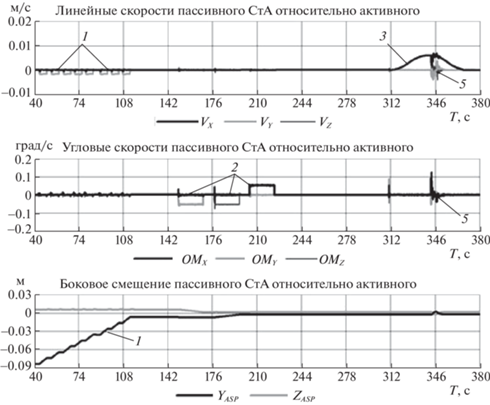
Рис. 16.
Угловые рассогласования агрегатов и контактные силы при сцепке (выравнивание с использованием каркасной геометрической модели)
Влияние на достижение сцепки отклонений размеров в модели движения стенда от реальных значений оценивалось для причаливания с использованием специализированных СтА таким же образом, как и при стыковке УСА и УСП. Дополнительно учитывались погрешности при ручной установке прицельной камеры с помощью кронштейна. Радиус приемного конуса и цилиндра гнезда пассивного агрегата соответственно в 7 и 4 раза больше аналогичных радиусов гнезда захвата УСП. Поэтому относительная величина отклонений вычисляемых и отображаемых на каркасной модели контактирующих поверхностей головки СтМ и гнезда пассивного агрегата значительно меньше, чем на каркасной модели, показанной на рис. 12. В программе дополнительной визуализации углы поворота головки в шарнире СтМ не учитываются, поэтому расхождения между изображениями головки СтМ и гнезда пассивного агрегата могут быть больше. При использовании для наведения каркасной модели, рассчитанной с учетом контактного взаимодействия стыковочных устройств, и каркасной модели, рассчитанной только по углам в шарнирах манипулятора, сцепка с учетом описанных выше погрешностей уверенно достигалась при меньшем уровне тренированности оператора.
Заключение. Разработаны каркасные геометрические модели стыковочных устройств малого размера, отображающие их взаимное положение и контактное взаимодействие при причаливании космических объектов с помощью манипулятора. Созданы компьютерные стенды моделирования динамики таких операций в реальном времени как для выбора параметров команд управления, предварительной наземной тренировки операторов, так и для поддержания навыков управления в реальном полете. Представлены результаты оценки на таких стендах динамики причаливании космических объектов с помощью стыковочных устройств малого размера. Показано, что каркасные геометрические модели этих устройств облегчают оператору манипулятора наведение и достижение сцепки. Они могут быть использованы для управления, заменяя прицельную телекамеру и мишень, если направляющие элементы стыковочных устройств имеют размеры больше, чем погрешности наведения.
Список литературы
Черный И. Сентябрьская космическая демонстрация HTV // Новости космонавтики. 2009. № 11. С. 17–19.
MRM1 “Rassvet” Module is Berthed to the ISS. 18 May. 2010. URL: http://astrophilatelist.com/news/mrm1_rassvet_module_is_berthed_to_the_iss/2010-05-18-161.
Bergin C. SpaceX’s Dragon Berthed on the ISS to Complete Historic Arrival. May 25. 2012. URL: http://www.nasaspaceflight.com/2012/05/spacexs-dragon-historic-attempt-berth-with-iss.
Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
McLaughlin R.J., Warr W.H. The Common Berthing Mechanism (CBM) for International Space Station. URL: https://spacecraft.ssl.umd.edu/design_lib/ICES01-2435.ISS_CBM.pdf.
Яскевич А.В. Математическая модель космического манипулятора для полунатурной отработки операций причаливания полезного груза // Изв. РАН. ТиСУ. 2004. № 4. С. 157–176.
Голубев Ю.Ф., Яскевич А.В. Гибридное моделирование причаливания космических аппаратов // Изв. РАН. ТиСУ. 2020. № 4. С. 136–150.
Jaar G., Bélanger F., Harvie D., Lord.K. Advanced Robotics Simulation in the MOTS // Proc. 31st Intern. Sympos. on Robotics (ISR 2000). Montreal, Canada, 2000. P. 504–509.
a O., Buhariwala K., Roger N., MacLean J., Carr R. MDSF – A Generic Development and Simulation Facility for Flexible, Complex Robotic Systems // Robotica. 1997. V. 15. P. 49–62
Systems Engineering Simulator. URL: http://www.nasa.gov/centers/johnson/engineering/robotics_simulation/systems_engineering_simulator/index.html.
Yaskevich A. Real Time Simulation of Contact Interaction During Spacecraft Docking and Berthing // J. Mechanics Engineering and Automation. 2014. V. 4. № 1. P. 1–15.
Лесков А.Г., Яскевич А.В., Илларионов В.В., Морошкин С.Д., Чернышев И.Е. Математический стенд для отработки управления манипулятором ERA на контактной фазе причаливания // Электронный инженерный журнал: наука и инновации. 2013. № 9 (21). С. 57 (13 с.).
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления