

Известия РАН. Теория и системы управления, 2023, № 1, стр. 56-71
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ СИСТЕМАМИ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ В УСЛОВИЯХ ИНТЕРВАЛЬНОЙ НЕОПРЕДЕЛЕННОСТИ ХАРАКТЕРИСТИК ОБЪЕКТА
Ю. Э. Плешивцева a, Э. Я. Рапопорт a, *
a Самарский государственный технический ун-т
Самара, Россия
* E-mail: edgar.rapoport@mail.ru
Поступила в редакцию 04.07.2022
После доработки 31.07.2022
Принята к публикации 26.09.2022
- EDN: JAHTJS
- DOI: 10.31857/S0002338823010079
Аннотация
Предлагается конструктивный метод решения линейно-квадратичной задачи робастной оптимизации пространственно-временных управляющих воздействий в системах с распределенными параметрами параболического типа в условиях интервальной неопределенности неизменных во времени параметрических характеристик объекта. В соответствии со стратегией управления по принципу наилучшего гарантированного результата оценка достижимых целевых множеств управляемой системы производится по точности равномерного приближения к требуемому конечному состоянию на расширенном множестве аргументов, включающем кроме пространственных переменных все допустимое множество неопределенных факторов. Развиваемый подход базируется на разработанном ранее альтернансном методе построения параметризуемых алгоритмов программного управления, распространяющем на широкий круг задач оптимизации результаты теории нелинейных чебышевских приближений и существенно использующем фундаментальные закономерности предметной области. Показывается, что предлагаемые уравнения оптимальных регуляторов, сводимые к линейным законам обратной связи по измеряемому состоянию объекта с нестационарными коэффициентами передачи, приводят к достижимым значениям критериев оптимальности, не превышающим их верхних оценок в рассматриваемых условиях неопределенности.
Введение. Задачи управления не полностью определенными динамическими объектами относятся в настоящее время к числу приоритетных и представляют значительный теоретический и прикладной интерес [1–8]. Большинство работ в этом направлении относится к системам с сосредоточенными параметрами (ССП), для которых известные результаты получены в основном с использованием аппарата функций Ляпунова и линейных матричных неравенств при ограниченной неопределенности модельных представлений [2–4] либо с помощью модифицированных аналогов принципа максимума Понтрягина [5, 6], главным образом, в линейно-квадратичных задачах оптимизации со свободным правым концом фазовой траектории процесса управления.
Применительно к системам с распределенными параметрами (СРП), в рамках моделей которых описывается широкий круг управляемых процессов самой различной физической природы [9], задачи управления в условиях неопределенности принципиально усложняются бесконечной размерностью пространственно распределенной управляемой величины [7, 8]. Их решение разработанными для ССП методами становится затруднительным, особенно при типичных для приложений равномерных оценках целевых множеств конечных состояний СРП, на негладкой границе которых неприменимы классические условия трансверсальности [7, 8, 10–13].
В настоящей работе предлагается конструктивный метод решения линейно-квадратичной задачи оптимального управления СРП с заданной точностью равномерного приближения конечного состояния системы к требуемому пространственному распределению управляемой величины в условиях интервальной неопределенности неизменных во времени параметрических характеристик объекта. Разработанный метод опирается на установленные ранее в этих условиях альтернансные свойства параметризуемых оптимальных программных управляющих воздействий, распространяющие на рассматриваемые задачи оптимального управления известные результаты теории нелинейных чебышевских приближений [7, 8, 10–13].
1. Постановка задачи. Пусть управляемая величина $Q\left( {x,t} \right)$ объекта с распределенными параметрами описывается в зависимости от пространственной координаты $x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]$ и времени $t \in \left[ {0,{{t}_{1}}} \right]$ линейным уравнением второго порядка в частных производных параболического типа:
(1.1)
$\frac{{\partial Q\left( {x,t} \right)}}{{\partial t}} = a\left( x \right)\frac{{{{\partial }^{2}}Q\left( {x,t} \right)}}{{\partial {{x}^{2}}}} + b\left( x \right)\frac{{\partial Q\left( {x,t} \right)}}{{\partial x}} + c\left( x \right)Q\left( {x,t} \right) + u\left( {x,t} \right)$(1.2)
$Q\left( {x,0} \right) = {{Q}_{0}}\left( x \right) = {{Q}_{0}} = \operatorname{const} \geqslant 0$(1.3)
${{\alpha }_{0}}Q\left( {{{x}_{0}},t} \right) + {{\beta }_{0}}\frac{{\partial Q\left( {{{x}_{0}},t} \right)}}{{\partial x}} = 0;\quad {{\alpha }_{1}}Q\left( {{{x}_{1}},t} \right) + {{\beta }_{1}}\frac{{\partial Q\left( {{{x}_{1}},t} \right)}}{{\partial x}} = 0;\quad 0 \leqslant t \leqslant {{t}_{1}},$Здесь для простоты без потери общности получаемых далее основных результатов предполагается равномерное распределение $Q\left( {x,0} \right)$ по пространственной координате в (1.2) и управляющие воздействия не стесняются никакими дополнительными ограничениями.
Эквивалентное (1.1)–(1.3) представление модели объекта управления может быть получено в форме бесконечной системы обыкновенных дифференциальных уравнений первого порядка относительно коэффициентов (временных мод) ${{\bar {Q}}_{n}}\left( t \right)$ разложения $Q\left( {x,t} \right)$ в сходящийся в среднем ряд по ортонормированной с весом r(x) системе собственных функций ${{\varphi }_{n}}\left( {{{\mu }_{n}},x} \right)$, $n = 1,2,...$, определяемых вместе с собственными числами $\mu _{n}^{2}$ известными методами конечных интегральных преобразований [9, 13, 14]:
(1.4)
$\begin{gathered} \frac{{d{{{\bar {Q}}}_{n}}}}{{dt}} = - \mu _{n}^{2}{{{\bar {Q}}}_{n}}\left( t \right) + {{{\bar {u}}}_{n}}\left( t \right),\quad n = 1,2,...; \\ {{{\bar {Q}}}_{n}}\left( 0 \right) = {{{\bar {Q}}}^{{\left( 0 \right)}}}\left( {{{\mu }_{n}}} \right); \\ \end{gathered} $(1.5)
$Q\left( {x,t} \right) = \sum\limits_{n = 1}^\infty {{{{\bar {Q}}}_{n}}\left( t \right){{\varphi }_{n}}\left( {{{\mu }_{n}},x} \right)} .$Здесь ${{\bar {u}}_{n}}\left( t \right)$ – временные моды разложения $u\left( {x,t} \right)$ в ряд вида (1.5):
(1.6)
$u\left( {x,t} \right) = \sum\limits_{n = 1}^\infty {{{{\bar {u}}}_{n}}\left( t \right)} {{\varphi }_{n}}\left( {{{\mu }_{n}},x} \right),$При этом поведение каждой из модальных составляющих ${{\bar {Q}}_{n}}$ управляемой величины определяется только “своим” управляющим воздействием ${{\bar {u}}_{n}}$, согласно решению каждого из уравнений (1.4) в отдельности независимо от других, обеспечивая в итоге требуемое состояние $Q\left( {x,t} \right)$, описываемое рядом (1.5).
Можно показать [15, 16], что в малостеснительных условиях выполнения усиленных условий Коши–Липшица система уравнений (1.4) имеет единственное решение при заданных воздействиях ${{\bar {u}}_{n}}\left( t \right)$, которое с любой требуемой точностью при необходимости аппроксимируется решением “укороченной” системы, образуемой достаточно большим конечным числом $N$ первых уравнений (1.4) при ${{\bar {Q}}_{n}}\left( t \right) = 0$ для всех $n > N$. В итоге оказывается допустимой конечномерная аппроксимация модели (1.4) при $n = \overline {1,N} $, $N < \infty $. Всюду далее на этом основании учитывается ${{N}_{1}}$ мод ${{\bar {Q}}_{n}}$, $n = \overline {1,{{N}_{1}}} $, в (1.4), где ${{N}_{1}} = \infty $ или ${{N}_{1}} = N < \infty $ в зависимости от используемой схемы анализа и возможностей практической реализации исследуемых алгоритмов управления. Конкретный выбор числа N1 должен производиться при проектировании системы управления, исходя из практически требуемой точности описания модели объекта N1уравнениями (1.4).
В характерных условиях интервальной неопределенности начального состояния объекта ${{Q}_{0}}$ и вектора w его неизменных во времени параметрических характеристик, с точностью до которых определены ограниченные в этих условиях своими заданными максимально и минимально возможными величинами значения ${{\alpha }_{0}}$, ${{\alpha }_{1}}$, ${{\beta }_{0}}$, ${{\beta }_{1}}$ в (1.3), вся информация о величинах ${{Q}_{0}}$ и w исчерпывается сведениями об их принадлежности заданным компактным множествам $\Omega $ и $W$:
(1.7)
$\begin{gathered} {{Q}_{0}} \in \Omega ;\quad w \in W,\quad w = \left\{ {{{\alpha }_{0}},{{\alpha }_{1}},{{\beta }_{0}},{{\beta }_{1}}} \right\};\quad {{Q}_{{0\min }}} \leqslant {{Q}_{0}} \leqslant {{Q}_{{0\max }}}; \\ {{\alpha }_{{0\min }}} \leqslant {{\alpha }_{0}} \leqslant {{\alpha }_{{0\max }}};\quad {{\alpha }_{{1\min }}} \leqslant {{\alpha }_{1}} \leqslant {{\alpha }_{{1\max }}}; \\ {{\beta }_{{0\min }}} \leqslant {{\beta }_{0}} \leqslant {{\beta }_{{0\max }}};\quad {{\beta }_{{1\min }}} \leqslant {{\beta }_{1}} \leqslant {{\beta }_{{1\max }}}. \\ \end{gathered} $Поскольку собственные числа находятся в зависимости от коэффициентов $\alpha $ и $\beta $ в граничных условиях (1.3) [14], то ${{\mu }_{n}}$ в (1.4), (1.5) также оказываются заданными с точностью до известного интервала их возможных изменений.
Каждой реализуемой, согласно (1.7), паре $y = \left( {{{Q}_{0}},w} \right) \in Y = \Omega \times W$ значений неопределенных факторов при любом допустимом управлении $u\left( {x,t} \right)$ соответствует определяемая решением системы уравнений (1.4) траектория процесса $\bar {Q}\left( {\bar {u},t,y} \right) = \left( {{{{\bar {Q}}}_{n}}\left( {{{{\bar {u}}}_{n}},t,y} \right)} \right)$, $\bar {u} = \left( {{{{\bar {u}}}_{n}}} \right)$, $n = \overline {1,{{N}_{1}}} $, $t \in \left[ {0,{{t}_{1}}} \right]$. Их объединение по всем $y \in Y$ при одном и том же управляющем воздействии образует ансамбль траекторий [1]:
(1.8)
$Z\left( {t,\bar {u}} \right) = \cup \left\{ {\left. {\bar {Q}\left( {\bar {u},t,y} \right)} \right|y \in Y} \right\}$,(1.9)
$Q\left( {x,\bar {u},t,y} \right) = \sum\limits_{n = 1}^{{{N}_{1}}} {{{{\bar {Q}}}_{n}}\left( {{{{\bar {u}}}_{n}},t,y} \right){{\varphi }_{n}}} \left( {{{\mu }_{n}}\left( y \right),x} \right).$Пусть необходимо обеспечить за фиксируемое априори время t1 при управлении ансамблем (1.8) заданную точность $\varepsilon $ равномерного приближения конечного пространственного распределения управляемой величины $Q\left( {x,\bar {u},{{t}_{1}},y} \right)$ к требуемому состоянию, описываемому кусочно-непрерывной функцией $Q{\kern 1pt} {\text{*}}{\kern 1pt} {\text{*}}(x) > {{Q}_{0}}$, $x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]$, для всех $y \in Y$, согласно соотношению
(1.10)
${{\xi }_{\Sigma }}\left( {\bar {u}} \right) = \mathop {\max }\limits_{y \in Y} \left[ {\mathop {\max }\limits_{x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]} \left| {Q\left( {x,\bar {u},{{t}_{1}},y} \right) - Q{\kern 1pt} {\text{**}}(x)} \right|} \right] \leqslant \varepsilon ,$Пусть далее эффективность процесса управления объектом (1.1)–(1.3) оценивается квадратичным функционалом качества
(1.11)
$J\left( {u,y} \right) = \int\limits_0^{{{t}_{1}}} {\int\limits_{{{x}_{0}}}^{{{x}_{1}}} {[r\left( x \right){{Q}^{2}}\left( {x,u,t,y} \right) + r\left( x \right){{u}^{2}}\left( {x,t} \right)]dxdt \to \mathop {\min }\limits_u } } .$Переход к описанию объекта в терминах модальных переменных приводит в силу ортонормированности семейства собственных функций к представлению критерия (1.11) в следующем виде [13]:
(1.12)
${{J}_{1}}\left( {\bar {u},y} \right) = \int\limits_0^{{{t}_{1}}} {\left[ {\sum\limits_{n = 1}^{{{N}_{1}}} {(\bar {Q}_{n}^{2}\left( {{{{\bar {u}}}_{n}},t,y} \right) + \bar {u}_{n}^{2}\left( t \right))} } \right]dt \to \mathop {\min }\limits_{\bar {u}} } ,$(1.13)
${{\xi }_{\Sigma }}\left( {\bar {u}} \right) = \mathop {\max }\limits_{y \in Y} \left[ {\mathop {\max }\limits_{x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]} \left| {\sum\limits_{n = 1}^{{{N}_{1}}} {\bar {Q}_{n}^{{}}\left( {{{{\bar {u}}}_{n}},{{t}_{1}},y} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( y \right),x} \right) - Q{\kern 1pt} *{\kern 1pt} *\left( x \right){\kern 1pt} } } \right|{\kern 1pt} } \right] \leqslant \varepsilon .$В соответствии со стратегией управления по принципу наилучшего гарантированного результата рассмотрим следующую минимаксную задачу робастной оптимизации поведения ансамбля траекторий (1.8) [7]. Обозначим через $u\left( {Q,x,t} \right)$ управляющее воздействие с обратной связью по управляемой величине Q.
Требуется найти оптимальное управление $u{\kern 1pt} {\text{*}}(Q,x,t)$ обеспечивающее перевод не полностью определенного в условиях (1.7) объекта (1.4) в требуемое конечное состояний (1.13) при минимально возможном значении критерия оптимальности:
(1.14)
${{J}_{2}}\left( {\bar {u}} \right) = \mathop {\max }\limits_{y \in Y} {{J}_{1}}\left( {\bar {u},y} \right) \to \mathop {\min }\limits_{\bar {u}} .$Решение сформулированной задачи существует при достижимых значениях ε в (1.13) [1].
2. Программное оптимальное управление ансамблем траекторий. 2.1. Структура оптимального управления для детерминированной модели объекта. При некотором фиксированном значении $y = \tilde {y} = {\text{const}} \in Y$ задача (1.13), (1.14) приводится к рассмотренному в [13] виду
(2.1)
${{\xi }_{{1\Sigma }}}\left( {\bar {u}} \right) = \mathop {\max }\limits_{x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]} \left[ {\left| {\sum\limits_{n = 1}^{{{N}_{1}}} {\bar {Q}_{n}^{{}}\left( {{{{\bar {u}}}_{n}},{{t}_{1}},\tilde {y}} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),x} \right) - Q{\kern 1pt} *{\kern 1pt} *\left( x \right)} {\kern 1pt} } \right|{\kern 1pt} } \right] \leqslant \varepsilon ;$Как показано в [13], стандартные процедуры принципа максимума Понтрягина приводят к представлению оптимальных модальных управлений $\bar {u}_{n}^{*}\left( t \right)$ в форме явной функции от сопряженной переменной $\psi _{n}^{*}\left( t \right)$, соответствующей оптимальному процессу, независимо от других составляющих вектора $\bar {u}{\kern 1pt} * = (\bar {u}_{n}^{*})$, $n = \overline {1,{{N}_{1}}} $:
(2.3)
$\bar {u}_{n}^{*}\left( t \right) = \frac{1}{2}\psi _{n}^{*}\left( t \right),\quad n = \overline {1,{{N}_{1}}} .$2.2. Краевая задача принципа максимума для детерминированной модели объекта. Уравнения (1.4) с подстановкой управляющего воздействия в форме (2.3) образуют в рассматриваемом случае совместно с уравнениями для сопряженных переменных ${{\psi }_{n}}\left( t \right)$ линейную программно-управляемую систему второго порядка относительно двух переменных ${{\bar {Q}}_{n}}$, ${{\psi }_{n}}$ для каждого $n = \overline {1,{{N}_{1}}} $ [13]:
(2.4)
$\begin{gathered} \frac{{d{{\psi }_{n}}}}{{dt}} = 2{{{\bar {Q}}}_{n}} + \mu _{n}^{2}{{\psi }_{n}}; \\ \frac{{d{{{\bar {Q}}}_{n}}}}{{dt}} = - \mu _{n}^{2}{{{\bar {Q}}}_{n}} + \frac{1}{2}{{\psi }_{n}}. \\ \end{gathered} $Система (2.4) замыкается требованиями к ее конечному состоянию, которые считаются определенными, исходя из общего для всех $n = \overline {1,{{N}_{1}}} $ условия (2.1).
Решение уравнений (2.4) может быть получено в векторно-матричной форме [13]:
(2.5)
$\left[ {\begin{array}{*{20}{c}} {{{\psi }_{n}}\left( t \right)} \\ {{{{\bar {Q}}}_{n}}\left( t \right)} \end{array}} \right] = {{e}^{{{{A}_{n}}t}}}\left[ {\begin{array}{*{20}{c}} {{{\psi }_{n}}\left( 0 \right)} \\ {{{{\bar {Q}}}_{n}}\left( 0 \right)} \end{array}} \right].$Здесь ${{A}_{n}}$ – $2 \times 2$-матрица коэффициентов системы (2.4), ${{e}^{{{{A}_{n}}t}}}$ – $2 \times 2$-матрица (матричная экспонента)
(2.6)
${{e}^{{{{A}_{n}}t}}} = \left[ {\begin{array}{*{20}{c}} {{{A}_{{n11}}}\left( t \right)}&{{{A}_{{n12}}}\left( t \right)} \\ {{{A}_{{n21}}}\left( t \right)}&{{{A}_{{n22}}}\left( t \right)} \end{array}} \right],$2.3. Параметризация управляющих воздействий при полном объеме информации о характеристиках объекта. Согласно (2.5), $\psi _{n}^{*}\left( t \right)$, а следовательно, и программное управление (2.3) определяются для каждой известной величины ${{\bar {Q}}_{n}}\left( 0 \right)$ с точностью до начальных значений $\psi _{n}^{*}\left( 0 \right)$, совокупность которых для всех $n = \overline {1,{{N}_{1}}} $ выступает таким образом, в роли параметрического представления $u{\kern 1pt} {\text{*}}\left( {x,t} \right)$ в соответствии с (1.6), (2.3), (2.4) [17, 18]. Однако для систем с распределенными параметрами такой подход оказывается неконструктивным, прежде всего, в силу бесконечной размерности вектора $\psi \left( 0 \right) = (\psi _{n}^{{}}\left( 0 \right))$, $n = \overline {1,{{N}_{1}}} $ при ${{N}_{1}} = \infty $. В работе [12] применительно к требованиям (2.1), предъявляемым к конечному состоянию объекта $\bar {Q}\left( {{{t}_{1}}} \right) = \left( {{{{\bar {Q}}}_{n}}\left( {{{t}_{1}}} \right)} \right)$, $n = \overline {1,{{N}_{1}}} $, предложен конструктивный способ последовательной конечномерной параметризации управляющих воздействий (“ψ – параметризация”) на множестве M‑мерных векторов ${{\psi }^{{\left( M \right)}}} = \left( {{{{\tilde {\psi }}}_{i}}} \right)$, $i = \overline {1,M} $; ${{\tilde {\psi }}_{i}} = {{\psi }_{i}}\left( {{{t}_{1}}} \right)$, $M < {{N}_{1}}$, финишных значений ${{\tilde {\psi }}_{i}}$ первых M сопряженных функций в (2.4) при равных нулю всех остальных значениях ${{\psi }_{i}}\left( {{{t}_{1}}} \right)$:
(2.7)
${{\psi }^{{\left( M \right)}}} = \left( {{{\psi }_{i}}\left( {{{t}_{1}}} \right)} \right) = \left( {{{{\tilde {\psi }}}_{i}}} \right),\quad i = \overline {1,M} ;\quad {{\psi }_{i}}\left( {{{t}_{1}}} \right) = 0,\quad i > M.$С возрастанием $M$ обеспечивается попадание под действием параметризуемых на множестве параметров (2.7) управляющих воздействий вида (2.3) в сужающееся к началу координат в пространстве $\bar {Q}\left( t \right)$ целевое множество, гарантируя выполнение условий (2.1) для достижимых значений $\varepsilon $ при некотором конечном значении $M \geqslant 1$ [12].
Явная форма $\psi $-параметризованного управления (2.3) может быть получена в результате прогонки начальных условий в (2.5) к моменту $t = {{t}_{1}}$ в виде следующей линейной зависимости от определяемого, согласно (2.7), конечного значения $\psi _{n}^{*}\left( {{{t}_{1}}} \right)$ в оптимальном процессе и начального состояния ${{\bar {Q}}_{n}}\left( 0 \right)$ объекта управления [13]:
(2.8)
$\bar {u}_{n}^{*}\left( t \right) = \left\{ \begin{gathered} \frac{1}{2}[{{K}_{n}}\left( {t,{{t}_{1}}} \right)\tilde {\psi }_{n}^{*} + {{K}_{{1n}}}\left( {t,{{t}_{1}}} \right){{{\bar {Q}}}_{n}}\left( 0 \right)],\quad n \leqslant M; \hfill \\ \frac{1}{2}{{K}_{{1n}}}{{{\bar {Q}}}_{n}}\left( 0 \right),\quad n > M, \hfill \\ \end{gathered} \right.$(2.9)
$\begin{gathered} {{K}_{n}}\left( {t,{{t}_{1}}} \right) = {{{\hat {A}}}_{{n11}}}\left( {{{t}_{1}} - t} \right) + {{{\hat {A}}}_{{n12}}}\left( {{{t}_{1}} - t} \right){{B}_{n}}\left( {{{t}_{1}}} \right); \\ {{K}_{{1n}}}\left( {t,{{t}_{1}}} \right) = {{{\hat {A}}}_{{n12}}}\left( {{{t}_{1}} - t} \right){{B}_{{1n}}}\left( {{{t}_{1}}} \right); \\ \end{gathered} $(2.10)
${{B}_{n}}\left( {{{t}_{1}}} \right) = {{A}_{{n21}}}\left( {{{t}_{1}}} \right)A_{{n11}}^{{ - 1}}\left( {{{t}_{1}}} \right);\quad {{B}_{{1n}}}\left( {{{t}_{1}}} \right) = {{A}_{{n22}}}\left( {{{t}_{1}}} \right) - {{A}_{{n21}}}\left( {{{t}_{1}}} \right)A_{{n11}}^{{ - 1}}\left( {{{t}_{1}}} \right){{A}_{{n12}}}\left( {{{t}_{1}}} \right).$Последующая подстановка (2.8) в (1.6), где следует учесть ${{N}_{1}} \leqslant \infty $ слагаемых бесконечной суммы, приводит к ψ-параметризованной форме оптимального программного управления $u{\kern 1pt} {\text{*}}(x,t)$:
(2.11)
$u{\kern 1pt} {\text{*}}(x,t) = \frac{1}{2}\sum\limits_{n = 1}^M {{{K}_{n}}\left( {t,{{t}_{1}}} \right)\tilde {\psi }_{n}^{*}{{\varphi }_{n}}\left( {{{\mu }_{n}},x} \right)} + \frac{1}{2}\sum\limits_{n = 1}^{{{N}_{1}}} {{{K}_{{1n}}}\left( {t,{{t}_{1}}} \right){{{\bar {Q}}}_{n}}\left( 0 \right){{\varphi }_{n}}\left( {{{\mu }_{n}},x} \right)} $.Таким образом, $u{\kern 1pt} {\text{*}}(x,t)$ находится, согласно (2.11), с точностью до выбора оптимального вектора параметров $\psi _{*}^{{\left( M \right)}} = (\tilde {\psi }_{i}^{*})$, $i = \overline {1,M} $, в (2.7). К его определению применительно к задаче (1.13), (1.14) управления ансамблем траекторий (1.8) и сводится дальнейшая задача.
2.4. Редукция к не полностью определенной минимаксной задаче полубесконечной оптимизации. В зависимости от реализуемой величины $\tilde {y} \in Y$ оптимальное управление $\bar {u}_{n}^{*}\left( {t,\tilde {y}} \right)$ определяется в форме (2.8)–(2.10):
(2.12)
$\bar {u}_{n}^{*}\left( {t,\tilde {y}} \right) = \left\{ \begin{gathered} \frac{1}{2}\left[ {{{K}_{n}}\left( {t,{{t}_{1}},\tilde {y}} \right)\tilde {\psi }_{n}^{*} + {{K}_{{1n}}}\left( {t,{{t}_{1}},\tilde {y}} \right){{{\bar {Q}}}_{n}}\left( 0 \right)} \right],\quad n \leqslant M; \hfill \\ \frac{1}{2}{{K}_{{1n}}}\left( {t,{{t}_{1}},\tilde {y}} \right),\quad n > M; \hfill \\ \end{gathered} \right.$(2.13)
$\begin{gathered} {{K}_{n}}\left( {t,{{t}_{1}},\tilde {y}} \right) = {{{\hat {A}}}_{{n11}}}\left( {{{t}_{1}} - t,\tilde {y}} \right) + {{{\hat {A}}}_{{n12}}}\left( {{{t}_{1}} - t,\tilde {y}} \right){{B}_{n}}\left( {{{t}_{1}},\tilde {y}} \right); \\ {{K}_{{1n}}}\left( {t,{{t}_{1}},\tilde {y}} \right) = {{{\hat {A}}}_{{n12}}}\left( {{{t}_{1}} - t,\tilde {y}} \right){{B}_{{1n}}}\left( {{{t}_{1}},\tilde {y}} \right); \\ \end{gathered} $(2.14)
$\begin{gathered} {{B}_{n}}\left( {{{t}_{1}},\tilde {y}} \right) = {{A}_{{n21}}}\left( {{{t}_{1}},\tilde {y}} \right)A_{{n11}}^{{ - 1}}\left( {{{t}_{1}},\tilde {y}} \right); \\ {{B}_{{1n}}}\left( {{{t}_{1}},\tilde {y}} \right) = {{A}_{{n22}}}\left( {{{t}_{1}},\tilde {y}} \right) - {{A}_{{n21}}}\left( {{{t}_{1}},\tilde {y}} \right)A_{{n11}}^{{ - 1}}\left( {{{t}_{1}},\tilde {y}} \right){{A}_{{n12}}}\left( {{{t}_{1}},\tilde {y}} \right), \\ \end{gathered} $(2.15)
$u{\kern 1pt} *\left( {x,t,\tilde {y}} \right) = \frac{1}{2}\sum\limits_{n = 1}^M {{{K}_{n}}\left( {t,{{t}_{1}},\tilde {y}} \right)\tilde {\psi }_{n}^{*}{{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),x} \right)} + \frac{1}{2}\sum\limits_{n = 1}^{{{N}_{1}}} {{{K}_{{1n}}}\left( {t,{{t}_{1}},\tilde {y}} \right){{{\bar {Q}}}_{n}}\left( 0 \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),x} \right)} .$Интегрирование уравнений системы (1.4) с $\psi $-параметризованным управляющим воздействием вида (2.12)–(2.14) позволяет получить в форме (1.9) зависимости $Q(x,{{\psi }^{{\left( M \right)}}},\tilde {y})$ управляемой величины в конце оптимального процесса и критерия оптимальности ${{J}_{1}}({{\psi }^{{\left( M \right)}}},\tilde {y})$ в (1.12) для каждого значения $\bar {Q}\left( 0 \right)$ в (2.12) в виде явных функций x, ${{\psi }^{{\left( M \right)}}}$ и $\tilde {y}$. В результате осуществляется точная редукция исходной задачи оптимального управления (1.12)–(1.14) к минимаксной задаче полубесконечной оптимизации (ЗПО) [10, 11]:
(2.16)
${{J}_{2}}({{\psi }^{{\left( M \right)}}}) = \mathop {\max }\limits_{\tilde {y} \in Y} {{J}_{1}}({{\psi }^{{\left( M \right)}}},\tilde {y}) \to \mathop {\min }\limits_{{{\psi }^{{\left( M \right)}}}} ;$(2.17)
${{\xi }_{\Sigma }}({{\psi }^{{\left( M \right)}}}) = \mathop {\max }\limits_{\tilde {y} \in Y} \left[ {\mathop {\max }\limits_{x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]} \left| {Q(x,{{\psi }^{{\left( M \right)}}},\tilde {y}) - Q{\kern 1pt} {\text{*}}{\kern 1pt} {\text{*}}\left( x \right)} \right|} \right] \leqslant \varepsilon $ЗПО (2.16), (2.17) существенно усложняется по сравнению с ее частным случаем для детерминированной модели объекта управления [13], во-первых, ограничением на функцию максимума в (2.17), определяемую на расширенном множестве аргументов, которое включает кроме пространственной переменной $x \in \left[ {{{x}_{0}},{{x}_{1}}} \right]$ все допустимые реализации неопределенных факторов $y \in Y$, и, во-вторых, вычислением ${{J}_{2}}({{\psi }^{{\left( M \right)}}})$ в (2.16) по максимальной величине ${{J}_{1}}$ на множестве Y.
Аналогично детерминированному варианту вида (2.1), (2.2), к которому сводится задача (2.16), (2.17) с фиксируемыми значениями $\tilde {y}$, размерность M вектора $\psi _{*}^{{\left( M \right)}} = (\tilde {\psi }_{n}^{*})$, $n = \overline {1,M} $, однозначно определяется в зависимости от заданной величины $\varepsilon $ в (2.17) соотношением [10–13]
(2.18)
$M = \omega \;\;{\text{для всех}}\;\;\varepsilon :\varepsilon _{{\min }}^{{\left( \omega \right)}} \leqslant \varepsilon < \varepsilon _{{\min }}^{{\left( {\omega - 1} \right)}},$
Значения $\varepsilon _{{\min }}^{{\left( \omega \right)}}$, $\omega = \overline {1,\rho } $, образуют, как правило, убывающую с возрастанием ω цепочку неравенств [10–13]. Задача (2.16), (2.17) оказывается разрешимой, если $\varepsilon \geqslant {{\varepsilon }_{{\inf }}}$. Здесь точная нижняя грань ${{\varepsilon }_{{\inf }}}$ достижимых значений $\varepsilon $ становится равной минимаксу $\varepsilon _{{\min }}^{{\left( \rho \right)}}$, где $\rho = \infty $ при ${{\varepsilon }_{{\inf }}} = 0$ и $\rho < \infty $ при ${{\varepsilon }_{{\inf }}} > 0$ соответственно для управляемых и неуправляемых относительно $Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x)$ объектов [10].
2.5. Решение минимаксной задачи полубесконечной оптимизации. Решение ЗПО (2.16), (2.17) относительно вектора параметров ${{\psi }^{{\left( M \right)}}}$, а также априори неизвестной величины $\varepsilon _{{\min }}^{{\left( M \right)}}$ в (2.18) в случае, когда по исходным условиям задачи должно быть выполнено равенство $\varepsilon = \varepsilon _{{\min }}^{{\left( M \right)}}$ в (2.17), может быть получено альтернансным методом [10, 11, 13]. Метод базируется на специальных альтернансных свойствах искомого решения $\psi _{*}^{{\left( M \right)}} = (\tilde {\psi }_{i}^{*})$, $i = \overline {1,M} $, задачи (2.16), (2.17) и диктуемой закономерностями предметной области дополнительной информации о характере и формах распределения результирующего состояния $Q(x,{{\psi }^{{\left( M \right)}}},y) - Q{\kern 1pt} *{\kern 1pt} *\left( x \right)$ управляемой величины в области $G\, = \,[{{x}_{0}},{{x}_{1}}]\, \times \,Y$, $\left( {x,y} \right) \in G$, и значения критерия оптимальности ${{I}_{1}}(\psi _{*}^{{\left( M \right)}},y)$ в области $Y \mathrel\backepsilon y$. Можно показать [10], что в рассматриваемой ЗПО, согласно альтернансным свойствам $\psi _{*}^{{\left( M \right)}}$, в условиях малостеснительных допущений равные допустимой величине ε значения $\mathop {\max }\limits_{x,\tilde {y}} {\text{|}}Q(x,\psi _{*}^{{(M)}},\tilde {y})\, - \,Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x){\text{|}}$ и совпадающие с ${{J}_{2}}(\psi _{*}^{{\left( M \right)}})$ в (2.16) значения $\mathop {\max }\limits_{\tilde {y}} {{J}_{1}}(\psi _{*}^{{\left( M \right)}},\tilde {y})$ достигаются соответственно в некоторых точках $(x_{j}^{0}$, $\tilde {y} = y_{j}^{0}) \in G$, $j = \overline {1,{{R}_{x}}} $, и $y_{{ei}}^{0} \in Y$, $i = \overline {1,{{R}_{y}}} $:
(2.20)
$\left| {Q(x_{j}^{0},\psi _{*}^{{\left( M \right)}},y_{j}^{0}) - Q{\kern 1pt} *{\kern 1pt} *(x_{j}^{0})} \right| = \varepsilon ,\quad j = \overline {1,{{R}_{x}}} ,$(2.21)
${{J}_{2}}(\psi _{*}^{{\left( M \right)}}) = {{J}_{1}}(\psi _{*}^{{\left( M \right)}},y_{{ei}}^{0}),\quad i = \overline {1,{{R}_{y}}} .$В общем случае значения $y_{j}^{0}$ неопределенных факторов в (2.21) заранее не определены и процедура их поиска существенно затрудняет дальнейшее решение задачи [5, 6]. Ограничимся далее типичной для прикладных задач возможностью предварительной фиксации этих величин, как правило, на границе $\partial Y$ области Y, которые считаются известными, исходя из физических закономерностей конкретных оптимизируемых процессов [7, 10, 19–22].
Числа ${{R}_{x}}$ и ${{R}_{y}}$ в (2.20), (2.21) определяются следующими соотношениями в зависимости от значения $\varepsilon $ в (2.20), замыкающими систему равенств (2.20), (2.21) относительно искомых параметров оптимального процесса:
(2.22)
${{R}_{x}} + {{R}_{y}} = M + 1,\quad {\text{если}}\quad \varepsilon _{{\min }}^{{\left( M \right)}} < \varepsilon < \bar {\varepsilon };\quad {\text{если}}$(2.23)
${{R}_{x}} = M + 1,\quad {\text{если}}\quad \varepsilon = \varepsilon _{{\min }}^{{\left( M \right)}};$(2.24)
${{R}_{y}} = M + 1,\quad {\text{если}}\quad \varepsilon \geqslant \bar {\varepsilon } = \mathop {\max }\limits_{x,\tilde {y}} {\text{|}}Q(x,{{\bar {\psi }}^{{\left( M \right)}}},\tilde {y}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x){\text{|}};\quad {{\bar {\psi }}^{{\left( M \right)}}} = \arg \mathop {\min }\limits_{{{\psi }^{{\left( M \right)}}}} {{J}_{2}}({{\psi }^{{\left( M \right)}}}),$При наличии информации из предметной области о форме распределений $Q(x,\psi _{*}^{{\left( M \right)}},y)$ на $G \mathrel\backepsilon \left( {x,y} \right)$ и ${{J}_{1}}(\psi _{*}^{{\left( M \right)}},y)$ на $Y \mathrel\backepsilon y$, которая позволяет идентифицировать точки $x_{j}^{0}$, $y_{j}^{0}$, $y_{{ei}}^{0}$ и знаки разности $Q(x_{j}^{0},\psi _{*}^{{\left( M \right)}},y_{j}^{0}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x_{j}^{0})$, равенства (2.20), (2.21), дополненные условиями существования экстремума функций $Q(x,\psi _{*}^{{\left( M \right)}},y) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x)$ и ${{J}_{1}}(\psi _{*}^{{\left( M \right)}},y)$ соответственно в принадлежащих $\operatorname{int} \left[ {{{x}_{0}},{{x}_{1}}} \right]$ точках $x_{{jg}}^{0} \in \left\{ {x_{j}^{0}} \right\}$ при $y = y_{{jg}}^{0} \in \left\{ {y_{j}^{0}} \right\}$, $g = \overline {1,{{R}_{{1x}}}} $, ${{R}_{{1x}}} \leqslant {{R}_{x}}$, и внутренних точках $y_{{eip}}^{0} \in \left\{ {y_{{ei}}^{0}} \right\}$ множества $Y$, $p = \overline {1,{{R}_{{1y}}}} $, ${{R}_{{1y}}} \leqslant {{R}_{y}}$, переводятся в случае (2.22) в замкнутую систему уравнений:
(2.25)
$Q(x_{j}^{0},\psi _{*}^{{\left( M \right)}},y_{j}^{0}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x_{j}^{0}) = \pm \varepsilon ,\quad j = \overline {1,{{R}_{x}}} ;$(2.26)
${{J}_{2}}(\psi _{*}^{{\left( M \right)}}) = {{J}_{1}}(\psi _{*}^{{\left( M \right)}},y_{{ei}}^{0}),\quad i = \overline {1,{{R}_{y}}} ;$(2.27)
$\frac{\partial }{{\partial x}}[Q(x_{{jg}}^{0},\psi _{*}^{{\left( M \right)}},y_{{jg}}^{0}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x_{{jg}}^{0})] = 0,\quad g = \overline {1,{{R}_{{1x}}}} ;$(2.28)
$\frac{\partial }{{\partial y}}{{J}_{1}}(\psi _{*}^{{\left( M \right)}},y_{{eip}}^{0}) = 0,\quad p = \overline {1,{{R}_{{1y}}}} $Совместное решение в условиях (2.22) ${{R}_{x}} + {{R}_{y}} + {{R}_{{1x}}} + {{R}_{{1y}}} = M + 1 + {{R}_{{1x}}} + {{R}_{{1y}}}$ уравнений (2.25)–(2.28) относительно $M + 1 + {{R}_{{1x}}} + {{R}_{{1y}}}$ неизвестных $\psi _{*}^{{\left( M \right)}} = (\psi _{i}^{*})$, $i = \overline {1,M} $; ${{J}_{2}}(\psi _{*}^{{\left( M \right)}})$: $x_{{jg}}^{0}$, $g = \overline {1,{{R}_{{1x}}}} $; $y_{{eip}}^{0}$, $p = \overline {1,{{R}_{{1y}}}} $, при заданных величинах $y_{j}^{0}$ позволяет определить все искомые параметры в ЗПО (2.16), (2.17) применительно к варианту (2.22).
В случае (2.23) получаем систему $M + 1 + {{R}_{{1x}}}$ уравнений (2.25), (2.27), разрешаемую относительно $M + 1 + {{R}_{{1x}}}$ неизвестных $\psi _{*}^{{\left( M \right)}} = (\psi _{i}^{*})$, $i = \overline {1,M} $; $\varepsilon _{{\min }}^{{\left( M \right)}}$; $x_{{jg}}^{0}$, $g = \overline {1,{{R}_{{1x}}}} $.
Для выпуклого минимизируемого функционала качества (1.12) значения $\mathop {\max }\limits_{\tilde {y}} {{J}_{1}}(\psi _{*}^{{\left( M \right)}},\tilde {y})$ в (2.16) достигаются в точках $y_{{ei}}^{0} \in \partial Y$, $i = \overline {1,{{R}_{y}}} $ [6]. Ограничимся далее типичным случаем наличия при ${{R}_{y}} = 1$ в (2.26) только одной такой заранее фиксируемой (подобно $y_{j}^{0}$) точки $y_{{e1}}^{0} \in \partial Y$, соответствующей единственной “наихудшей” реализации значений неопределенных величин $y \in Y$, на которой достигается $\mathop {\max }\limits_{\tilde {y}} {{J}_{1}}(\psi _{*}^{{\left( M \right)}},\tilde {y})$. При этом точки $y_{{eip}}^{0} \in \operatorname{int} Y$ отсутствуют и уравнения (2.28) исключаются из системы (2.25)–(2.28), которая принимает в итоге следующий вид:
(2.29)
$Q(x_{j}^{0},\psi _{*}^{{\left( M \right)}},y_{j}^{0}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x_{j}^{0}) = \pm \varepsilon ,\quad j = \overline {1,{{R}_{x}}} ;$(2.30)
${{J}_{2}}(\psi _{*}^{{\left( M \right)}}) = {{J}_{1}}(\psi _{*}^{{\left( M \right)}},y_{{e1}}^{0});$(2.31)
$\frac{\partial }{{\partial x}}[Q(x_{{jg}}^{0},\psi _{*}^{{\left( M \right)}},y_{{jg}}^{0}) - Q{\kern 1pt} *{\kern 1pt} {\text{*}}(x_{{jg}}^{0})] = 0,\quad g = \overline {1,{{R}_{{1x}}}} ,\quad {{R}_{{1x}}} \leqslant {{R}_{x}},$Состояние управляемой величины $Q(x,\psi _{*}^{{\left( M \right)}},\tilde {y})$ в конце оптимального процесса при любом реализуемом значении $\tilde {y} \in Y$ описывается рядом вида (1.9):
(2.32)
$Q(x,\psi _{*}^{{\left( M \right)}},\tilde {y}) = \sum\limits_{n = 1}^{{{N}_{1}}} {{{{\bar {Q}}}_{n}}} (\psi _{*}^{{\left( M \right)}},\tilde {y}){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),x} \right)$(2.33)
${{\bar {Q}}_{n}}(\psi _{*}^{{\left( M \right)}},\tilde {y}) = {{B}_{n}}\left( {{{t}_{1}},\tilde {y}} \right)\psi _{n}^{*}\left( {{{t}_{1}}} \right) + {{B}_{{1n}}}\left( {{{t}_{1}},\tilde {y}} \right){{\bar {Q}}_{n}}\left( 0 \right),$Таким образом, значения $\psi _{*}^{{\left( M \right)}}$ в задаче (2.16), (2.17) находятся в результате решения системы уравнений (2.29), (2.31), учитывающей конечное состояние всего ансамбля траекторий управляемой системы. Зависимость ${{J}_{1}}(\psi _{*}^{{\left( M \right)}},\tilde {y})$ от $\tilde {y}$ создается за счет включения в подынтегральную функцию критерия (1.12) значений ${{\bar {Q}}_{n}}$ и ${{\bar {u}}_{n}}$, зависящих от y.
При заранее фиксируемом известными закономерностями предметной области значении y* величины $y_{{e1}}^{0}$ в (2.30) в силу соотношений (2.16), (2.17), (2.30) выполняются равенства для найденного вектора $\psi _{*}^{{\left( M \right)}}$:
(2.34)
$\begin{gathered} \mathop {\min }\limits_{{{\psi }^{{\left( M \right)}}}} {{J}_{2}}\left( {{{\psi }^{{\left( M \right)}}}} \right) = {{J}_{2}}\left( {\psi _{*}^{{\left( M \right)}}} \right) = \mathop {\max }\limits_{y \in Y} {{J}_{1}}\left( {\psi _{*}^{{\left( M \right)}},y} \right) = {{J}_{1}}\left( {\psi _{*}^{{\left( M \right)}},y_{{e1}}^{0}} \right) = {{J}_{1}}\left( {\psi _{*}^{{\left( M \right)}},y{\kern 1pt} *} \right); \\ \left( {\psi _{*}^{{\left( M \right)}},y{\kern 1pt} *} \right) = \arg \mathop {\min }\limits_{{{\psi }^{{\left( M \right)}}} \in {{G}_{\Sigma }}} \mathop {\max }\limits_{\tilde {y} \in Y} {{J}_{1}}\left( {{{\psi }^{{\left( M \right)}}},\tilde {y}} \right),\quad {{G}_{\Sigma }} = \left\{ {{{\psi }^{{\left( M \right)}}}:{{\xi }_{\Sigma }}\left( {{{\psi }^{{\left( M \right)}}}} \right) \leqslant \varepsilon } \right\}. \\ \end{gathered} $Отсюда в соответствии с представлением критерия оптимальности ${{J}_{1}}\left( {\bar {u},y} \right)$ в форме (1.12) следует, что искомое $\psi $-параметризованное оптимальное программное управление $\bar {u}{\kern 1pt} {\text{*}}(t)$ ансамблем траекторий (1.8) совпадает с $\bar {u}{\kern 1pt} *\left( {t,y{\kern 1pt} *} \right) = (\bar {u}_{n}^{*}\left( {t,y{\kern 1pt} *} \right))$, $n = \overline {1,{{N}_{1}}} $, где $\bar {u}_{n}^{*}\left( {t,y{\kern 1pt} *} \right)$ определяется, согласно (2.12), при $\tilde {y} = y{\kern 1pt} *$.
В итоге программное оптимальное управление ансамблем (1.8) определяется в форме (2.15) с подстановкой (2.12)–(2.14), где $\tilde {\psi }_{*}^{{\left( M \right)}}$, $n = \overline {1,M} $, находятся в результате решения системы уравнений (2.29)–(2.31), а $\tilde {y}$ выбирается равным y*.
2.6. Учет ограничений на характер пространственного распределения программного управления ансамблем траекторий. При характерных для приложений затруднениях в технической реализации пространственного распределения управлений $u{\kern 1pt} *\left( {x,t} \right)$ вида (2.15) они ищутся в форме взвешенной суммы заранее фиксируемых проектными решениями объекта и заведомо исполнимых стандартными инженерными средствами зависимостей (чаще всего, кусочно-постоянных) ${{F}_{m}}\left( x \right)$, $m = \overline {1,s} $; $s \geqslant 1$, от пространственной координаты с весовыми коэффициентами, в роли которых выступает искомые сосредоточенные управляющие воздействия ${{\upsilon }_{m}}\left( t \right)$ [13]:
(2.35)
$u\left( {x,t} \right) = \sum\limits_{m = 1}^s {{{F}_{m}}\left( x \right){{\upsilon }_{m}}\left( t \right)} ,\quad m = \overline {1,s} .$Конечное интегральное преобразование равенства (2.35) приводит к следующему выражению для модальных управляющих воздействий ${{\bar {u}}_{n}}\left( t \right)$ в (1.4) [13]:
(2.36)
${{\bar {u}}_{n}}\left( t \right) = \sum\limits_{m = 1}^s {{{{\bar {F}}}_{{mn}}}{{\upsilon }_{m}}} \left( t \right),\quad n = \overline {1,{{N}_{1}}} ,$В типичной для приложений ситуации, когда можно ограничиться учетом только ${{N}_{1}} = N$ мод ${{\bar {Q}}_{n}}$ в (1.5) и возможен выбор $s = N$ в (2.35), равенства (2.36) при $n = \overline {1,N} $, $N = s$ образуют линейную систему уравнений относительно $\upsilon _{m}^{*}\left( t \right)$, $m = \overline {1,s} $, для заданных значений $\bar {u}_{n}^{*}\left( t \right)$ в (2.8), решение которой определяется формулами Крамера непосредственно по решению задачи с автономными модальными управлениями:
(2.37)
$\upsilon _{m}^{*}\left( t \right) = \sum\limits_{n = 1}^s {\frac{{{{D}_{{mn}}}}}{D}\bar {u}_{n}^{*}\left( t \right)} ,\quad m = \overline {1,s} .$Здесь $D = \det \left[ {{{{\bar {F}}}_{{mn}}}} \right]$, m, $n = \overline {1,s} $; ${{D}_{{mn}}}$ – алгебраическое дополнение n-го элемента m-го столбца D и $D \ne 0$ при линейно-независимых функциях $F\left( x \right)$.
В результате искомое программное управление ансамблем траектории $u{\text{*}}(x,t)$ восстанавливается в виде (2.35) с подстановкой (2.37):
(2.38)
$u{\kern 1pt} *\left( {x,t} \right) = \sum\limits_{m = 1}^s {{{F}_{m}}\left( x \right)} \sum\limits_{n = 1}^s {\frac{{{{D}_{{mn}}}}}{D}\bar {u}_{n}^{*}\left( t \right)} ,$3. Синтез оптимального управления с модальными управляющими воздействиями. Применение известных процедур аналитического конструирования оптимальных регуляторов в рассматриваемой не полностью определенной линейно-квадратичной задаче оптимизации существенно усложняется трудностями реализации алгоритмов позиционного управления ансамблем траекторий движения объекта [1, 6] и отсутствием классических условий трансверсальности на негладкой границе целевого множества (1.10) [8, 13]. В настоящем разделе предлагается метод синтеза управляющих воздействий $u{\kern 1pt} {\text{*}}(Q,x,t)$ с обратной связью, осуществляемый по принципу наилучшего гарантированного результата с использованием, подобно [8, 13], в качестве условий трансверсальности на правом конце оптимальной траектории известных конечных значений управляемых и сопряженных переменных, которые определяются предварительным расчетом программного управления. Рассмотрим сначала задачу синтеза для детерминированной модели объекта при $\tilde {y} = y{\kern 1pt} *$ в (2.12)–(2.14), для которой управляющее воздействие $u{\kern 1pt} {\text{*}}(x,t)$ совпадает, как показано в разд. 2, с оптимальным программным управлением ансамблем траекторий (1.8) в форме (2.15) с заменой $\tilde {y}$ на y*.
Перенос (прогонка) начальных значений ${{\psi }_{n}}\left( 0 \right)$, ${{Q}_{n}}\left( 0 \right)$ в (2.5) в конечный момент времени t1 приводит при $\tilde {y} = y{\kern 1pt} *$ к решению системы уравнений (2.4) в следующем виде [13]:
(3.1)
$\psi _{n}^{*}\left( {{{t}_{1}}} \right) = {{A}_{{n11}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right)\psi _{n}^{*}\left( t \right) + {{A}_{{n12}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right)\bar {Q}_{n}^{*}\left( {t,y{\kern 1pt} *} \right);$(3.2)
$\bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right) = {{A}_{{n21}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right)\psi _{n}^{*}\left( t \right) + {{A}_{{n22}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right)\bar {Q}_{n}^{*}\left( {t,y{\kern 1pt} *} \right),$(3.3)
$\begin{gathered} \psi _{n}^{*}(t,\psi _{n}^{*}\left( {{{t}_{1}}} \right),{{{\bar {Q}}}_{n}}\left( 0 \right),\bar {Q}_{n}^{*}\left( {t,y{\kern 1pt} *} \right)) = {{T}_{{n1}}}(t,{{t}_{1}},\psi _{n}^{*}\left( {{{t}_{1}}} \right),\bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right)) \times \\ \, \times {{T}_{{n2}}}(t,{{t}_{1}},\psi _{n}^{*}\left( {{{t}_{1}}} \right),\bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right))\bar {Q}_{n}^{*}\left( {t,y{\kern 1pt} *} \right),\quad n = \overline {1,{{N}_{1}}} ; \\ \end{gathered} $(3.4)
${{T}_{{n1}}} = {{[\bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right){{A}_{{n11}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right) - \psi _{n}^{*}\left( {{{t}_{1}}} \right){{A}_{{n21}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right)]}^{{ - 1}}};$(3.5)
${{T}_{{n2}}} = \psi _{n}^{*}\left( {{{t}_{1}}} \right){{A}_{{n22}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right) - \bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right){{A}_{{n12}}}\left( {{{t}_{1}} - t,y{\kern 1pt} *} \right).$Выражения (3.3)–(3.5) однозначным образом определяют зависимость $\psi _{n}^{*}$ от своих аргументов. При этом зависимость $\psi _{n}^{*}$ от ${{\bar {Q}}_{n}}\left( 0 \right)$ в (3.3) характеризуется представлением $\bar {Q}_{n}^{*}\left( {{{t}_{1}},y{\kern 1pt} *} \right)$ в (3.4), (3.5) в виде (2.33).
Подстановка (3.3) в выражение (2.3) для модального управления приводит к линейному закону синтеза оптимального регулятора с нестационарными коэффициентами обратных связей по измеряемому состоянию $\bar {Q}\left( t \right) = \left( {{{{\bar {Q}}}_{n}}\left( t \right)} \right)$, $n = \overline {1,{{N}_{1}}} $, в форме (1.6) в условиях реализации значения y = y*:
(3.6)
$u{\kern 1pt} *(\bar {Q}\left( {t,y{\kern 1pt} *} \right),y{\kern 1pt} *,x,t) = \frac{1}{2}\sum\limits_{n = 1}^{{{N}_{1}}} {{{T}_{{n1}}}} \left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right){{\bar {Q}}_{n}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {y{\kern 1pt} *} \right),x} \right).$Здесь значения ${{T}_{{n1}}}$, ${{T}_{{n2}}}$ представляются, согласно (3.4), (3.5), известными функциями времени с фиксируемыми на протяжении процесса управления величинами ${{\bar {Q}}_{n}}\left( 0 \right)$ в (2.33), которые находятся по результатам наблюдения $\bar {Q}\left( t \right)$ в момент t = 0.
При наблюдении вектора $\bar {Q}\left( {t,y} \right)$ в условиях неопределенности величин $y \in Y$ при некотором заранее неизвестном значении $y = \tilde {y} = {\text{const}} \ne y{\kern 1pt} *$ реализуемый алгоритм обратной связи сохраняется в виде (3.6) с заменой $\bar {Q}\left( {t,y{\kern 1pt} *} \right)$ на $\bar {Q}\left( {t,\tilde {y}} \right)$:
(3.7)
$u\left( {\bar {Q}\left( {t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\sum\limits_{n = 1}^{{{N}_{1}}} {{{T}_{{n1}}}} \left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right){{\bar {Q}}_{n}}\left( {t,\tilde {y}} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {y{\kern 1pt} *} \right),x} \right)$(3.8)
$u{\kern 1pt} *\left( {\bar {Q}\left( {t,\tilde {y}} \right),\tilde {y},x,t} \right) = \frac{1}{2}\sum\limits_{n = 1}^{{{N}_{1}}} {{{T}_{{n1}}}} \left( {t,\tilde {y}} \right){{T}_{{n2}}}\left( {t,\tilde {y}} \right){{\bar {Q}}_{n}}\left( {t,\tilde {y}} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),x} \right),$Поскольку алгоритму (3.6) соответствует оптимальное программное управление (2.15) ансамблем траекторий при $\tilde {y} = y{\kern 1pt} *$, то на основании (3.7), (3.8) и соотношений (2.34) выполняются неравенства:
(3.9)
$\begin{gathered} {{J}_{1}}\left( {u{\kern 1pt} *\left( {\bar {Q}\left( {t,\tilde {y}} \right),\tilde {y},x,t} \right),\tilde {y}} \right) \leqslant {{J}_{1}}\left( {u\left( {\bar {Q}\left( {t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right),y{\kern 1pt} *} \right) \leqslant \mathop {\max }\limits_{\tilde {y} \in Y} {{J}_{1}}\left( {u\left( {\bar {Q}\left( {t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right),y{\kern 1pt} *} \right) = \\ \, = {{J}_{1}}\left( {u{\kern 1pt} *\left( {\bar {Q}\left( {t,y{\kern 1pt} *} \right),y{\kern 1pt} *,x,t} \right),y{\kern 1pt} *} \right) = {{J}_{2}}\left( {u{\kern 1pt} *\left( {\bar {Q}\left( {t,y{\kern 1pt} *} \right),y{\kern 1pt} *,x,t} \right)} \right), \\ \end{gathered} $Переход в (3.7) от $\bar {Q}\left( {t,\tilde {y}} \right)$ к измеряемому выходу объекта ${{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right) = \left( {Q\left( {{{x}_{{uj}}},t,\tilde {y}} \right)} \right)$ в r точках ${{x}_{{uj}}} \in \left[ {{{x}_{0}},{{x}_{1}}} \right]$, $j = \overline {1,r} $, определяется в соответствии с (1.5) векторно-матричным уравнением наблюдения
(3.10)
${{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right) = {{\Phi }_{u}}\left( {\tilde {y}} \right)\bar {Q}\left( {t,\tilde {y}} \right);\quad {{\Phi }_{u}}\left( {\tilde {y}} \right) = \left[ {{{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {\tilde {y}} \right),{{x}_{{uj}}}} \right)} \right],\quad n = \overline {1,{{N}_{1}}} ;\quad j = \overline {1,r} .$В условиях $r < {{N}_{1}}$ неполного измерения состояния для восстановления вектора $\bar {Q}\left( {t,\tilde {y}} \right)$ по значениям ${{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right)$ требуется построение наблюдателя точного или пониженного порядка [23]. Если по условиям требуемой точности моделирования объекта (1.4) можно ограничиться учетом только M первых слагаемых $\bar {Q}\left( {t,\tilde {y}} \right) = \left( {{{{\bar {Q}}}_{n}}\left( {t,\tilde {y}} \right)} \right)$, $n = \overline {1,M} $, с минимальным их числом $M < {{N}_{1}}$, необходимым для решения системы уравнений (2.29), (2.31) относительно вектора $\psi _{*}^{{\left( M \right)}}$, то $\bar {Q}\left( {t,\tilde {y}} \right)$ непосредственно определяется решением уравнения (3.10) относительно $\bar {Q}\left( {t,\tilde {y}} \right)$ при r = M, N1 = = N = M:
(3.11)
$\bar {Q}\left( {t,\tilde {y}} \right) = {{\Phi }^{{ - 1}}}\left( {\tilde {y}} \right){{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right).$Подстановка (3.11) в (3.7) приводит к линейному алгоритму синтеза с обратными связями по измеряемому выходу объекта:
(3.12)
$\begin{gathered} u\left( {{{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\Phi _{u}^{{ - 1}}\left( {\tilde {y}} \right){{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right)\varphi \left( {y{\kern 1pt} *,x,t} \right); \\ \varphi \left( {y{\kern 1pt} *,x,t} \right) = \left( {{{T}_{{n1}}}\left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {y{\kern 1pt} *} \right),x} \right)} \right),\quad n = \overline {1,M} , \\ \end{gathered} $Аналогично (3.8) регулятор (3.12) нереализуем ввиду невозможности предварительного вычисления $\Phi _{u}^{{ - 1}}\left( {\tilde {y}} \right)$ для непредсказуемых заранее конкретных значений $\tilde {y} \in Y$. Замена $\Phi _{u}^{{ - 1}}\left( {\tilde {y}} \right)$ на $\Phi _{u}^{{ - 1}}\left( {y{\kern 1pt} *} \right)$ в (3.12) приводит в силу неравенств вида (3.9) к реализуемому гарантированному алгоритму управления
(3.13)
$u\left( {{{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\Phi _{u}^{{ - 1}}\left( {y{\kern 1pt} *} \right){{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right)\varphi \left( {y{\kern 1pt} *,x,t} \right),$В условиях (2.35)–(2.37) при ${{N}_{1}} = N = s$ управление $u{\kern 1pt} *\left( {x,t} \right)$ представляется в форме (2.38). Подстановка $\bar {u}_{n}^{*}\left( t \right)$ в (2.38) в виде (2.3), (3.3)–(3.5) приводит в таком случае вместо (3.7) и (3.13) к следующим алгоритмам синтеза оптимального регулятора с обратными связями по $\bar {Q}\left( {t,\tilde {y}} \right)$:
(3.14)
$u{\kern 1pt} *\left( {\bar {Q}\left( {t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\sum\limits_{m = 1}^s {{{F}_{m}}\left( x \right)\sum\limits_{n = 1}^s {\frac{{{{D}_{{mn}}}}}{D}{{T}_{{n1}}}\left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right)} } \,{{\bar {Q}}_{n}}\left( {t,\tilde {y}} \right)$(3.15)
$\begin{gathered} u{\kern 1pt} *\left( {{{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\sum\limits_{m = 1}^s {{{F}_{m}}\left( x \right)[\Phi _{u}^{{ - 1}}\left( {y{\kern 1pt} *} \right){{Q}_{u}}\left( {{{x}_{u}},t,\tilde {y}} \right){{\varphi }_{{om}}}\left( {y{\kern 1pt} *,t} \right)]} {\kern 1pt} {\kern 1pt} ; \\ {{\varphi }_{{om}}}\left( {y{\kern 1pt} *,t} \right) = \left( {{{T}_{{n1}}}\left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right)\frac{{{{D}_{{mn}}}}}{D}} \right),\quad n = \overline {1,M} , \\ \end{gathered} $4. Синтез оптимального регулятора для не полностью определенного объекта технологической теплофизики. В качестве примера, представляющего самостоятельный интерес, рассмотрим задачу синтеза оптимального управления температурным режимом нагрева неограниченной пластины в условиях интервальной неопределенности характеристик объекта [7, 10, 19–22].
Пусть температурное поле Q(x, t) неограниченной пластины описывается в процессе ее нагрева в зависимости от пространственной координаты x и времени t линейным неоднородным уравнением теплопроводности вида (1.1)–(1.3) в относительных единицах [19–21]:
(4.1)
$\frac{{\partial Q\left( {x,t} \right)}}{{\partial t}} = \frac{{{{\partial }^{2}}Q\left( {x,t} \right)}}{{\partial {{x}^{2}}}} + u\left( {x,t} \right),\quad 0 \leqslant x \leqslant 1,\quad t \in \left[ {0,{{t}_{1}}} \right];$(4.2)
$Q\left( {x,0} \right) = {{Q}_{0}} = {\text{const}} \geqslant 0;\quad \frac{{\partial Q\left( {0,t} \right)}}{{\partial x}} = 0;\quad \frac{{\partial Q\left( {1,t} \right)}}{{\partial x}} + \alpha Q\left( {1,t} \right) = 0,$В характерной ситуации, когда вся информация о неизменных во времени величинах Q0 и α в (4.2) исчерпывается сведениями об их предельно допустимых значениях ${{Q}_{{0\min }}}$, ${{Q}_{{0\max }}}$, ${{\alpha }_{{\min }}}$, ${{\alpha }_{{\max }}}$, получаем следующий вектор $y$ неопределенных факторов в (1.8), (1.9):
(4.3)
$y = \left( {{{Q}_{0}},\alpha } \right) \in Y = \left\{ {{{Q}_{0}},\alpha :{{Q}_{{0\min }}} \leqslant {{Q}_{0}} \leqslant {{Q}_{{0\max }}};{{\alpha }_{{\min }}} \leqslant \alpha \leqslant {{\alpha }_{{\max }}}} \right\}.$При этом управляемая величина $Q\left( {x,\bar {u},t,y} \right)$ представляется в форме ее разложения в ряд (1.9) по собственным функциям ${{\varphi }_{n}}\left( {x,y} \right) = \cos \left( {{{\mu }_{n}}\left( y \right),x} \right)$ [19–21]:
(4.4)
$Q\left( {x,\bar {u},t,y} \right) = \sum\limits_{n = 1}^{{{N}_{1}}} {\frac{{2{{\alpha }^{2}}\cos \left( {{{\mu }_{n}}x} \right)}}{{(\mu _{n}^{2} + {{\alpha }^{2}} + \alpha ){{{\sin }}^{2}}\left( {{{\mu }_{n}}} \right)}}} \,{{\bar {Q}}_{n}}\left( {{{{\bar {u}}}_{n}},t,y} \right),$(4.6)
$\frac{{d{{{\bar {Q}}}_{n}}}}{{dt}} = - \mu _{n}^{2}{{\bar {Q}}_{n}} + {{\bar {u}}_{n}}\left( t \right);\quad {{\bar {Q}}_{n}}\left( 0 \right) = {{\bar {Q}}^{0}}\left( {{{\mu }_{n}}} \right),\quad n = \overline {1,{{N}_{1}}} ,$Зависимости ${{\mu }_{n}}\left( \alpha \right)$ в (4.5) и ${{\bar {Q}}^{{\left( 0 \right)}}}\left( {{{\mu }_{n}},{{Q}_{0}}} \right)$ в (4.6) определяют $Q\left( {x,\bar {u},t,y} \right)$ как сложную функцию y.
Требуется найти управление $u{\kern 1pt} *\left( {Q,x,t} \right)$ с обратной связью, являющееся решением минимаксной задачи оптимизации (1.12)–(1.14) при $Q{\kern 1pt} *{\kern 1pt} *\left( x \right) = Q{\kern 1pt} *{\kern 1pt} * = {\text{const}} > {{Q}_{0}}$.
4.1. Решение задачи программного управления. Процедура $\psi $-параметризации приводит к представлению $\psi {\kern 1pt} *\left( {{{t}_{1}}} \right)$ в форме (2.7). Для типичного в приложениях случая $\varepsilon = \varepsilon _{{\min }}^{{\left( 2 \right)}}$ в (2.17), (2.19) здесь следует принять M = 2, согласно (2.18), и тогда в соответствии с (2.7)
Примем здесь и всюду далее для большей простоты и наглядности получаемых результатов ${{N}_{1}} = N = 2$ в (4.4), ограничиваясь учетом только двух модальных переменных в сумме (4.4). При $\varepsilon = \varepsilon _{{\min }}^{{\left( 2 \right)}}$ получаем ${{R}_{x}} = M + 1 = 3$ в (2.29) в соответствии с правилом (2.23), образуя замкнутую систему равенств (2.29), (2.31) относительно неизвестных $\psi _{*}^{{\left( M \right)}}$; $x_{{jg}}^{0}$, $j = 1,2,3$, $g = \overline {1,{{R}_{{1x}}}} $, при заданных величинах $y_{{jg}}^{0}$ в (2.31).
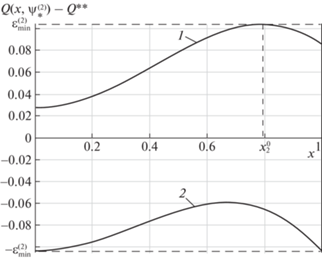
Физические закономерности поведения нестационарных температурных полей в оптимальном процессе нагрева пластины и альтернансные свойства $\psi _{*}^{{\left( 2 \right)}}$ однозначным образом определяют в рассматриваемом примере, подобно [19–21], при M = 2, $\varepsilon = \varepsilon _{{\min }}^{{\left( 2 \right)}}$, ${{Q}_{0}} = {\text{const}}$, $Q{\kern 1pt} *{\kern 1pt} * = {\text{const}}$ форму кривых результирующего распределения температуры $Q(x,\psi _{*}^{{(M)}},y)\, - \,Q{\kern 1pt} *{\kern 1pt} *$ по пространственной координате (рис. 1) для всех значений $y = \left( {{{Q}_{0}},\alpha } \right) \in Y$. Это позволяет заведомо идентифицировать в (2.29), (2.31) при ${{R}_{{1x}}} = 1$ координаты точек $x_{1}^{0} = 0$, $x_{2}^{0} = x_{{2g}}^{0} = x_{{21}}^{0} \in \left( {0,1} \right)$, $x_{3}^{0} = 1$; значения $y_{1}^{0} = \left( {{{Q}_{{0\min }}},{{\alpha }_{{\max }}}} \right)$, $y_{2}^{0}\,\, = \,\,y_{{2g}}^{0}\,\, = \,\,y_{{21}}^{0}\,\, = \,\,({{Q}_{{0\max }}},{{\alpha }_{{\min }}})$; $y_{3}^{0} = y_{1}^{0}$ и знаки $Q(x_{j}^{0},\psi _{*}^{{(2)}},y_{j}^{0})$ – Q**, $j = \overline {1,3} $. В результате равенства (2.29), (2.31) редуцируются к замкнутой системе линейных по $\tilde {\psi }_{1}^{*}$, $\tilde {\psi }_{2}^{*}$ уравнений:
В силу базовых свойств температурного распределения $Q(x,\psi _{*}^{{\left( 2 \right)}},y)$ значение $y_{{e1}}^{0}$ в (2.30), на котором достигается оптимальная величина ${{J}_{2}}(\psi _{*}^{{\left( 2 \right)}})$ квадратичного критерия качества, оказывается равной, подобно [19–21], величине $y{\kern 1pt} * = y_{2}^{0} = \left( {{{Q}_{{0\max }}},{{\alpha }_{{\min }}}} \right)$. В таком случае ${{J}_{2}}(\psi _{*}^{{\left( 2 \right)}})$ непосредственно находится из уравнения (2.30) при найденном значении $\psi _{*}^{{\left( 2 \right)}}$.
В итоге оптимальное программное управление определяется в виде (2.15) с подстановкой (2.13), (2.14) при $\tilde {y} = y{\kern 1pt} * = y_{2}^{0} = \left( {{{\alpha }_{{\min }}},{{Q}_{{0\max }}}} \right)$ и известных значениях ${{A}_{{nij}}}$, ${{\hat {A}}_{{nij}}}$; $i,j = 1,2$.
4.2. Аналитическое конструирование оптимального регулятора. Согласно (3.7), (4.3), получаем линейный с нестационарными коэффициентами алгоритм оптимального управления с обратными связями по реализуемому состоянию $\bar {Q}\left( {t,\tilde {y}} \right) = \left( {{{{\bar {Q}}}_{n}}\left( {t,\tilde {y}} \right)} \right)$, $n = 1,2$:
(4.7)
$u\left( {\bar {Q}\left( {t,\tilde {y}} \right),y{\kern 1pt} *,x,t} \right) = \frac{1}{2}\sum\limits_{n = 1}^2 {{{T}_{{n1}}}} \left( {t,y{\kern 1pt} *} \right){{T}_{{n2}}}\left( {t,y{\kern 1pt} *} \right){{\bar {Q}}_{n}}\left( {t,\tilde {y}} \right){{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {y{\kern 1pt} *} \right),x} \right),\quad y{\kern 1pt} * = \left( {{{Q}_{{0\max }}},{{\alpha }_{{\min }}}} \right)$(4.8)
$\begin{gathered} {{\varphi }_{n}}\left( {{{\mu }_{n}}\left( {{{\alpha }_{{\min }}}} \right),x} \right) = {{q}_{n}}\left( {{{\alpha }_{{\min }}}} \right)\cos \left( {{{\mu }_{n}}\left( {{{\alpha }_{{\min }}}} \right),x} \right),\quad n = 1,2; \\ {{q}_{n}}\left( {{{\alpha }_{{\min }}}} \right) = \frac{{2{{\alpha }_{{\min }}}}}{{(\mu _{n}^{2}\left( {{{\alpha }_{{\min }}}} \right) + \alpha _{{\min }}^{2} + {{\alpha }_{{\min }}}){{{\sin }}^{2}}\left( {{{\mu }_{n}}\left( {{{\alpha }_{{\min }}}} \right)} \right)}}, \\ \end{gathered} $При наличии двух измерителей выхода объекта в точках ${{x}_{{u1}}}$, ${{x}_{{u2}}} \in \left[ {0,1} \right]$ получаем систему двух линейных уравнений (3.10) при $\tilde {y} = y{\kern 1pt} *$:
(4.9)
$\begin{gathered} {{Q}_{u}}\left( {{{x}_{{u1}}},t,y{\kern 1pt} *} \right) = {{{\bar {Q}}}_{1}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{1}}\left( {{{\mu }_{1}}\left( {y{\kern 1pt} *} \right),{{x}_{{u1}}}} \right) + {{{\bar {Q}}}_{2}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{2}}\left( {{{\mu }_{2}}\left( {y{\kern 1pt} *} \right),{{x}_{{u1}}}} \right); \\ {{Q}_{u}}\left( {{{x}_{{u2}}},t,y{\kern 1pt} *} \right) = {{{\bar {Q}}}_{1}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{1}}\left( {{{\mu }_{1}}\left( {y{\kern 1pt} *} \right),{{x}_{{u2}}}} \right) + {{{\bar {Q}}}_{2}}\left( {t,y{\kern 1pt} *} \right){{\varphi }_{2}}\left( {{{\mu }_{2}}\left( {y{\kern 1pt} *} \right),{{x}_{{u2}}}} \right), \\ \end{gathered} $Подстановка решения системы уравнений (4.9) в (4.7) определяет искомый алгоритм синтеза оптимального регулятора с обратными связями по наблюдаемому выходу объекта в форме (3.13), где в данном примере ${{x}_{u}} = \left( {{{x}_{{u1}}},{{x}_{{u2}}}} \right)$, $\Phi _{u}^{{ - 1}}\left( {y{\kern 1pt} *} \right)$ – 2 × 2-матрица и матрица-столбец $\varphi \left( {y{\kern 1pt} *,x,t} \right)$, состоит из двух элементов при n = 1, 2 в (3.12).
На рис. 1, 2 представлены некоторые расчетные результаты, полученные при $Q{\kern 1pt} *{\kern 1pt} * = 0.5$; ${{\alpha }_{{\min }}} = 0.3$; ${{\alpha }_{{\max }}} = 0.7$; ${{Q}_{{0\min }}} = 0$; ${{Q}_{{0\max }}} = 0.15$; ${{t}_{1}} = 0.5$ при ${{x}_{{u1}}} = 1$, ${{x}_{{u2}}} = 0$.
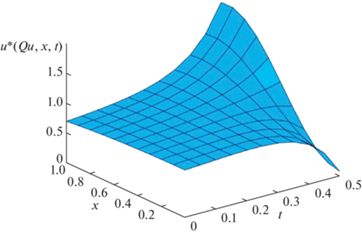
Рис. 2.
Управляющее воздействие с обратными связями на пространственно-временной плоскости в условиях реализации значений $y = \left( {{{\alpha }_{{\min }}},{{Q}_{{0\max }}}} \right)$
На рис. 1 показано результирующее состояние ансамбля траекторий оптимального процесса (1 – $\alpha = {{\alpha }_{{\min }}}$; ${{Q}_{0}} = {{Q}_{{0\max }}}$; 2 – $\alpha = {{\alpha }_{{\max }}}$; ${{Q}_{0}} = {{Q}_{{0\min }}}$; $\tilde {\psi }_{1}^{*} = 2.12$; $\tilde {\psi }_{2}^{*} = - 1.40$; $\varepsilon _{{\min }}^{{\left( 2 \right)}} = 0.104$).
Рисунок 2 иллюстрирует в условиях реализации неизменных во времени значений $\tilde {y} = y{\kern 1pt} * = \left( {{{\alpha }_{{\min }}},{{Q}_{{0\max }}}} \right)$ поведение управляющих воздействий $u\left( {{{Q}_{u}}\left( {{{x}_{u}},t,y{\kern 1pt} *} \right),y{\kern 1pt} *,x,t} \right)$ на пространственно-временной плоскости, изменяющихся во времени по алгоритму (3.13) в зависимости от текущих значений измеряемых сигналов обратной связи в точках ${{x}_{{u1}}} = 1$, ${{x}_{{u2}}} = 0$ с нестационарными коэффициентами передачи.
Заключение. Предлагаемые методы решения линейно-квадратичных задач робастной оптимизации пространственно-временного управления системами с распределенными параметрами параболического типа в условиях интервальной неопределенности параметрических характеристик объекта разработаны применительно к характерным для приложений оценкам целевых множеств конечных состояний ансамбля траекторий управляемой системы в равномерной метрике. Полученные уравнения субоптимальных регуляторов, сводимые к линейным алгоритмам обратной связи по измеряемому состоянию объекта с нестационарными коэффициентами передачи, характеризуются достигаемыми значениями критерия оптимальности, не превышающими их максимально возможные величины в исследуемых условиях неопределенности, и тем самым реализуют стратегию управления по принципу наилучшего гарантированного результата.
Список литературы
Куржанский А.Б. Управление и наблюдение в условиях неопределенности. М.: Наука, 1977.
Поляк Б.Т., Хлебников М.В., Щербаков П.С. Управление линейными системами при внешних возмущениях: Техника линейных матричных неравенств. М.: ЛЕНАНД, 2014.
Поляк Б.Т., Хлебников М.В., Рапопорт Л.Б. Математическая теория автоматического управления. М.: ЛЕНАНД, 2019.
Афанасьев В.Н. Управление неопределенными динамическими объектами. М.: Физматлит, 2008.
Габасов Р., Кириллова Ф.М. Принцип максимума в теории оптимального управления. Минск: Наука и техника, 1974.
Пантелеев А.В., Бортаковский А.С. Теория управления в примерах и задачах. М.: Высш. шк., 2003.
Рапопорт Э.Я. Робастная параметрическая оптимизация динамических систем в условиях ограниченной неопределенности // АиТ. 1995. № 3. С. 86–96.
Рапопорт Э.Я. Аналитическое конструирование оптимальных регуляторов в линейно-квадратичных задачах управления системами с распределенными параметрами при равномерных оценках целевых множеств // Изв. РАН. ТиСУ. 2021. № 3. С. 23–38.
Бутковский А.Г. Методы управления системами с распределенными параметрами. М.: Наука, 1975.
Рапопорт Э.Я. Альтернансный метод в прикладных задачах оптимизации. М.: Наука, 2000.
Рапопорт Э.Я. Оптимальное управление системами с распределенными параметрами. М.: Высш. шк., 2009.
Плешивцева Ю.Э., Рапопорт Э.Я. Метод последовательной параметризации управляющих воздействий в краевых задачах оптимального управления системами с распределенными параметрами // Изв. РАН. ТиСУ. 2009. № 3. С. 22–33.
Плешивцева Ю.Э., Рапопорт Э.Я. Пространственно-временное управление системами с распределенными параметрами в линейно-квадратичных задачах оптимизации с равномерными оценками целевых множеств // Изв. РАН ТиСУ. 2022. № 4. С. 49–65.
Рапопорт Э.Я. Структурное моделирование объектов и систем управления с распределенными параметрами. М.: Высш. шк. 2003.
Валеев Г.К., Жаутыков О.А. Бесконечные системы дифференциальных уравнений. Алма-Ата: Наука Казахской ССР, 1974.
Коваль В.А. Спектральный метод анализа и синтеза распределенных управляемых систем. Саратов: Саратовский гос. техн. ун-т, 1997.
Федоренко Р.П. Приближенное решение задач оптимального управления. М.: Наука, 1978.
Васильев Ф.П. Методы оптимизации. М.: Факториал-Пресс, 2002.
Рапопорт Э.Я. Оптимизация процессов индукционного нагрева металла. М.: Металлургия, 1993.
Rapoport E., Pleshivtseva Yu. Optimal Control of Induction Heating Processes. L., N.Y.: CRC Press, Taylor & Francis Group, Boca Raton, 2007.
Рапопорт Э.Я., Плешивцева Ю.Э. Оптимальное управление температурными режимами индукционного нагрева. М.: Наука, 2012.
Рапопорт Э.Я., Плешивцева Ю.Э. Метод полубесконечной оптимизации в прикладных задачах управления системами с распределенными параметрами. М.: Наука, 2021.
Рапопорт Э.Я. Анализ и синтез систем автоматического управления с распределенными параметрами. М.: Высш. шк., 2005.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления