

Теоретические основы химической технологии, 2023, T. 57, № 2, стр. 228-237
Исследование эффективности теплообмена в перемешивающем устройстве с неравномерным движением мешалки
А. А. Приходько a, *, Е. О. Герасименко a
a Кубанский государственный технологический университет
Краснодар, Россия
* E-mail: sannic92@gmail.com
Поступила в редакцию 20.01.2023
После доработки 27.01.2023
Принята к публикации 30.01.2023
- EDN: EJLQYF
- DOI: 10.31857/S0040357123020094
Аннотация
Перемешивание является одним из наиболее распространенных процессов в различных отраслях химической промышленности: пищевой, строительной, нефтеперерабатывающей, фармакологической и других. Повышение интенсивности перемешивания может быть достигнуто путем изменения скорости или направления движения рабочего органа, что подтверждается исследованиями отечественных и зарубежных авторов. В настоящей работе рассматривается планетарный привод перемешивающего устройства, позволяющий реализовать различные виды неравномерного движения рабочего органа. Преимуществами предлагаемого механизма перед существующими аналогами являются компактность, надежность, а также простота настройки коэффициента неравномерности вращения мешалки. На базе лабораторного реактора IKA сконструирована экспериментальная установка, с помощью которой проведены сравнительные испытания интенсивности теплообмена в традиционном перемешивающем устройства с постоянной частотой вращения и с использованием предложенного планетарного механизма. В результате эксперимента установлено, что сообщение рабочему органу неравномерного движения позволяет сократить время перемешивания, а также повысить энергоэффективность аппарата.
ВВЕДЕНИЕ
Перемешивание является одним из наиболее эффективных способов интенсификации тепломассообменных процессов [1] и неотъемлемым этапом при производстве широкого спектра продукции различных отраслей промышленности: химической, пищевой, нефтеперерабатывающей, строительной, фармакологической и многих других [2]. Реакторы с мешалками применяются, в основном, для перемешивания жидких сред при приготовлении растворов, эмульсий и суспензий [3]. Традиционно такие аппараты представляют собой емкость с вертикальным расположением рабочего органа, движение которого осуществляется с помощью электродвигателя или мотор-редуктора.
Широкое распространение традиционных аппаратов объясняется их надежностью и простотой конструкции, невысокой стоимостью изготовления и эксплуатации. В течение XX в. и по настоящее время разработаны и уточнены методы проектирования и расчета перемешивающих устройств [4, 5], накоплена значительная экспериментальная база [6, 7], проведена оптимизация с учетом технологических особенностей конкретных производств [8]. Значительное внимание уделяется разработке и исследованиям нетиповых конструкций рабочих органов [9–11], так как геометрия мешалки влияет на скорость и направление потоков в реакторе.
В установившемся режиме рабочий орган вертикального аппарата с мешалкой совершает вращательное движение с постоянной угловой скоростью. Недостатком такого способа перемешивания является то, что скорости движения перемешиваемой среды и рабочего органа выравниваются, это приводит к снижению интенсивности перемешивания. Появление центральной воронки при увеличении частоты вращения двигателя также является негативным фактором, поэтому ее глубину стараются снизить путем добавления отражательных перегородок [12], смещением или наклоном оси вращения рабочего органа [13, 14] и другими способами [15].
Проведенные различными авторами исследования [16, 17] показали, что изменение скорости и/или направления вращения рабочего органа позволяет повысить эффективность процессов тепло и массообмена в реакторе. Планетарные [18] и пространственные [19] перемешивающие устройства хорошо зарекомендовали себя при приготовлении вязких продуктов, однако такие исполнительные механизмы находятся в непосредственном контакте с перемешиваемой средой, что может приводить к попаданию продукта на элементы привода, их повышенному износу и выходу из строя.
Высокий перепад скоростей можно получить с помощью вибрационных перемешивающих устройств, в большинстве которых применяется кривошипно-ползунный механизм [20, 21]. Однако более предпочтительной представляется схема механизма, в которой вал мешалки соединен с крышкой через вращательную кинематическую пару. Такая конструкция предполагает использование стандартных уплотнений и подшипников качения, и может быть использована в реакторах под давлением и вакуумом, а также при работе с агрессивными средами. Например, известны перемешивающие устройства с периодическим внутрицикловым изменением угловой скорости мешалки [22, 23], которые позволяют ликвидировать застойные и малоэффективные зоны [24]. Значительными недостатками существующих зубчато-рычажных приводов таких устройств являются высокая стоимость проектирования и изготовления, сложность в настройке коэффициента неравномерности вращения рабочего органа, а также большие габариты.
В работе представлена конструкция планетарного привода перемешивающего устройства, позволяющего получить несколько видов неравномерного движения (одностороннее вращательное, движение с остановками, возвратно-вращательное движение) и предназначенного для повышения эффективности перемешивания жидких сред в реакторе. Цель настоящего исследования состоит в сравнительном анализе интенсивности теплообмена в традиционном аппарате с постоянной скоростью вращения мешалки и в реакторе с применением предлагаемого привода при различных режимах перемешивания.
ТЕОРЕТИЧЕСКИЙ АНАЛИЗ
Предлагаемый в составе привода перемешивающего устройства исполнительный механизм представляет собой двухрядную планетарную передачу с двумя внешними зацеплениями, имеющую одну пару цилиндрических и одну пару эллиптических зубчатых колес (рис. 1).
Рис. 1.
Схема планетарного механизма перемешивающего устройства: 1 – входной вал; 2 – выходной вал; 3 – центральное неподвижное зубчатое колесо; 4 – цилиндрическое зубчатое колесо сателлита; 5 – эллиптическое зубчатое колесо сателлита; 6 – вал сателлита; 7 – водило; 8 – эллиптическое зубчатое колесо на выходном валу.
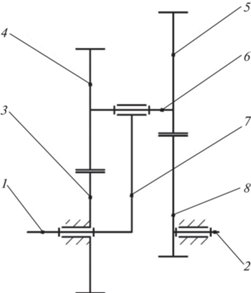
Исполнительный механизм перемешивающего устройства состоит из соосно установленных входного 1 и выходного 2 валов, центрального неподвижного зубчатого колеса 3, жестко закрепленного на корпусе соосно входному валу 1, сателлита, состоящего из цилиндрического зубчатого колеса 4 и эллиптического зубчатого колеса 5, расположенных на валу сателлита 6, водила 7, установленного на входном валу 1 и соединенного через вращательную кинематическую пару с валом сателлита 6, эллиптического зубчатого колеса 8, закрепленного на выходном валу 2. Эллиптические зубчатые колеса 8 и 5 имеют одинаковые размеры и установлены на валах таким образом, что ось вращения каждого вала проходит через фокус делительного эллипса эллиптического зубчатого колеса. Входной вал 1 соединен с электродвигателем, а на выходном валу 2 расположен рабочий орган.
Представленный механизм включается в состав привода соединением входного вала с электродвигателем и расположением на выходном валу рабочего органа. Принцип работы перемешивающего устройства следующий. Электродвигатель сообщает входному валу 1 вращательное движение, которое передается водилу 7, благодаря чему цилиндрическое зубчатое колесо 4 обкатывается по неподвижному зубчатому колесу 3. Вращательное движение цилиндрического колеса 4 передается валу сателлита 6 и эллиптическому зубчатому колесу 5, которое приводит в движение эллиптическое зубчатое колесо 8 и соответственно выходной вал 2, который благодаря переменному передаточному отношению пары эллиптических зубчатых колес совершает неравномерное вращательное движение. Так как выходной вал 2 совершает неравномерное вращательное движение, то рабочий орган также будет вращаться неравномерно, перемешивая продукт в реакторе.
Кинематический анализ механизма проведен с помощью построения плана скоростей его звеньев [25]. Аналог угловой скорости выходного вала механизма определяется величиной радиусов цилиндрических и эллиптических зубчатых колес механизма, при этом радиус зацепления эллиптического зубчатого колеса является функцией угла поворота входного вала и описывается уравнением эллипса в полярных координатах [26]:
(1)
$\rho = \frac{{a(1 - {{e}^{2}})}}{{1 - e\cos \left( {\frac{{{{R}_{1}}}}{{{{R}_{2}}}}{{\varphi }_{{{\text{in}}}}}} \right)}},$В итоге, получено следующее выражение для определения аналога угловой скорости выходного вала или передаточной функции механизма:
(2)
$\varphi _{{{\text{out}}}}^{'} = u = 1 - \frac{{{{R}_{1}}\rho }}{{{{R}_{2}}({{R}_{1}} + {{R}_{2}} - \rho )}}.$В зависимости от выбора радиусов цилиндрических зубчатых колес можно получить различные виды движения выходного вала: неравномерное движение при R1 = 0.038 м, R2 = 0.012 м, e = 0.475 (рис. 2а); движение с остановками при R1 = 0.037 м, R2 = 0.013 м, e = 0.475 (рис. 2б); возвратно-вращательное движение R1 = 0.025 м, R2 = 0.025 м, e = = 0.475 (рис. 2в).
Рис. 2.
Варианты планетарного механизма с эллиптическими зубчатыми колесами для различных видов движения: (а) – неравномерное движение; (б) – движение с остановками; (в) – возвратно-вращательное движение; a, b, c – большая полуось, малая полуось и фокальное расстояние эллипса; R1 и R2 – радиусы цилиндрических зубчатых колес.

Условия, при которых механизм реализует различные виды движения, можно представить следующим образом:
(3)
$\left\{ {\begin{array}{*{20}{c}} {\frac{{{{R}_{2}}}}{{{{R}_{1}}}} < \frac{{1 - e}}{{1 + e}},} \\ {\frac{{{{R}_{2}}}}{{{{R}_{1}}}} > \frac{{1 + e}}{{1 - e}};} \end{array}} \right.$(4)
$\left\{ {\begin{array}{*{20}{c}} {\frac{{{{R}_{2}}}}{{{{R}_{1}}}} = \frac{{1 - e}}{{1 + e}},} \\ {\frac{{{{R}_{2}}}}{{{{R}_{1}}}} = \frac{{1 + e}}{{1 - e}};} \end{array}} \right.$Таким образом, первый механизм (рис. 2а) удовлетворяет условию (3), второй механизм (рис. 2б) – условию (4) и третий механизм (рис. 2в) – условию (5). Подставляя геометрические параметры механизмов в уравнение аналога угловой скорости (2) с учетом (1), получим график функции аналога угловой скорости $\varphi _{{{\text{out}}}}^{'}({{\varphi }_{{{\text{in}}}}})$. Интегрирование (2) по обобщенной координате позволяет построить график угла поворота выходного вала механизма ${{\varphi }_{{{\text{out}}}}}({{\varphi }_{{{\text{in}}}}})$. Графики функций ${{\varphi }_{{{\text{out}}}}}({{\varphi }_{{{\text{in}}}}})$ и $\varphi _{{{\text{out}}}}^{'}({{\varphi }_{{{\text{in}}}}})$ для трех вариантов механизмов показаны на рис. 3.
Рис. 3.
Графики функций угла поворота (а) и аналога скорости (б) выходного вала для представленных вариантов механизмов: 1 – первый механизм; 2 – второй механизм; 3 – третий механизм.
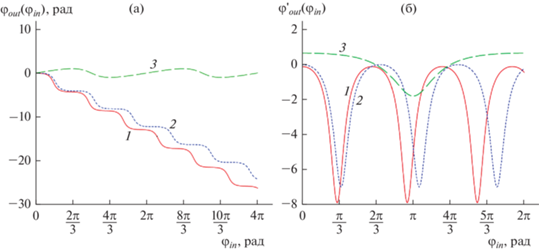
Представленные на рис. 2 механизмы обеспечивают требуемые виды движения выходного вала (рабочего органа), о чем свидетельствует анализ графиков ${{\varphi }_{{{\text{out}}}}}({{\varphi }_{{{\text{in}}}}})$ (рис. 3а). Как видно из зависимостей $\varphi _{{{\text{out}}}}^{'}({{\varphi }_{{{\text{in}}}}})$ (рис. 3б), аналог угловой скорости не является постоянной величиной и колеблется вокруг среднего значения. Критерием, характеризующим данную неравномерность движения, является коэффициент неравномерности вращения:
(6)
$\begin{gathered} \delta = \frac{{{{\omega }_{{{\text{out}}{\text{.max}}}}} - {{\omega }_{{{\text{out}}{\text{.min}}}}}}}{{{{\omega }_{{{\text{out}}{\text{.av}}}}}}} = \frac{{{{u}_{{\max }}}{{\omega }_{{{\text{in}}}}} - {{u}_{{\min }}}{{\omega }_{{{\text{in}}}}}}}{{{{u}_{{{\text{av}}}}}{{\omega }_{{{\text{in}}}}}}} = \\ = \frac{{{{u}_{{\max }}} - {{u}_{{\min }}}}}{{{{u}_{{{\text{av}}}}}}}, \\ \end{gathered} $Анализ уравнения (6) показывает, что при уменьшении среднециклового передаточного отношения коэффициент неравномерности увеличивается. В случае возвратно-вращательного движения (механизм 3) uav= 0, поэтому в таком случае величину неравномерности целесообразно характеризовать углом качания (амплитудой угловых колебаний) α:
(7)
$\alpha = {{\varphi }_{{{\text{out}}{\text{.max}}}}} - {{\varphi }_{{{\text{out}}{\text{.min}}}}},$Как следует из полученных результатов кинематического анализа, механизм обладает значительными возможностями для проведения лабораторных исследований. Получение различных видов движения и регулировка неравномерности вращения мешалки реализуется в одном корпусе с помощью сменных комплектов цилиндрических и эллиптических зубчатых колес.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
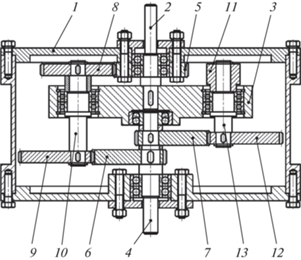
На базе лабораторного реактора Ika Magic Plant разработан экспериментальный стенд перемешивающего устройства с неравномерным вращением рабочего органа (рис. 4).
Рис. 4.
Общий вид экспериментального стенда: 1 – электродвигатель; 2 – блок управления двигателем; 3 – штатив, на котором закреплен двигатель, 4 – исполнительный механизм перемешивающего устройства; 5 – входной вал исполнительного механизма; 6 – выходной вал исполнительного механизма; 7 – соединительная муфта; 8 – реактор; 9 – рама; 10 – крышка реактора; 11 – уплотнительный зажим; 12 – уплотнение рабочего органа; 13 – рабочий орган; 14 – штуцер для загрузки продукта; 15 – выпускной клапан; 16 – штуцеры для подвода теплоносителя.

Движение входного вала 5 осуществляется с помощью электродвигателя 1 верхнеприводной мешалки мощностью 72 Вт, с возможностью механической регулировки частоты вращения n = = 50–500 об/мин. Вращательное движение входного вала 5 с помощью исполнительного механизма 4 преобразуется в возвратно-вращательное движение выходного вала 6, которое посредством соединительной муфты 7 передается на рабочий орган 13, что приводит к перемешиванию жидкой среды в реакторе 8.
Общий вид планетарного исполнительного механизма неравномерного движения, построенного на базе предложенной схемы, показан на рис. 5.
Рис. 5.
Планетарный механизм неравномерного движения: 1 – корпус; 2 – входной вал; 3 – водило; 4 – выходной вал; 5 – солнечное колесо; 6, 7 –эллиптические зубчатые колеса на выходном валу; 8 – цилиндрическое зубчатое колесо; 9 – эллиптическое колесо; 10 – вал первого сателлита; 11 – противовес; 12 – эллиптическое колесо; 13 – вал второго сателлита.
Разъемная конструкция установки и исполнительного механизма позволяет провести переналадку экспериментального стенда: изменить неравномерность вращения или вид движения рабочего органа, проводить эксперименты в классическом вращательном перемешивающем устройстве.
Оценка эффективности перемешивания на примере процессов теплообмена является наиболее простым способом, так как не требует специальной вспомогательной и измерительной аппаратуры или постоянного отбора проб для отслеживания концентрации [27]. Измерение температуры производилось с помощью электронного термометра, с точностью 0.1°С.
Эксперимент проведен следующим образом. В рубашку реактора подавался теплоноситель (дистиллированная вода) температурой 70 ± 0.1°С, которая с помощью циркуляционного термостата поддерживалась постоянной в течение эксперимента. Затем через входной штуцер загружали 500 мл дистиллированной воды с температурой 20 ± 0.1°С, и производили перемешивание, что увеличивало интенсивность теплообмена между жидкостью и стенками реактора. Измерение температуры производилось с помощью электронного термометра в течение 20 мин с целью получения графиков зависимости температуры от времени в диапазоне от 40 до 60°С. В течение эксперимента также измерялась мощность, потребляемая приводом мешалки. С целью проведения сравнительных испытаний проведено перемешивание в классическом реакторе с постоянной частотой вращения рабочего органа, при 50, 100 и 200 об/мин (рис. 6).
Рис. 6.
Графики изменения температуры воды от времени при постоянной частоте вращения рабочего органа: 1 – 50; 2 – 100; 3 – 200 об/мин.
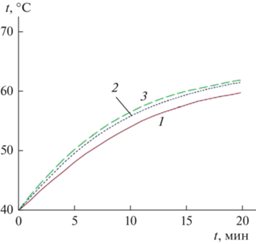
Анализ графиков показывает, что коэффициент теплопередачи между стенками реактора и перемешиваемой жидкостью высокий и позволяет проводить сравнительные эксперименты, так как увеличение подводимой мощности приводит к интенсификации процесса и сокращению времени перемешивания.
При частоте вращения вала двигателя (входного вала исполнительного механизма) 50 об/мин сравнительные испытания проводились на примере возвратно-вращательного движения рабочего органа. Угол качания α рассчитывался по формуле (7). Геометрические параметры зубчатых колес исполнительного механизма и характеристики режимов перемешивания указаны в табл. 1.
Таблица 1.
Характеристики механизмов для сравнительных испытаний при n = 50 об/мин
| R1, м | R2, м | e | α, ° | nin, об/мин | f, Гц | |
|---|---|---|---|---|---|---|
| Режим 1 | Двигатель соединен напрямую, n = 50 об/мин | |||||
| Режим 2 | 0.025 | 0.025 | 0.475 | 113 | 50 | 0.83 |
| Режим 3 | 0.025 | 0.025 | 0.543 | 131 | 50 | 0.83 |
| Режим 4 | 0.025 | 0.025 | 0.6 | 147 | 50 | 0.83 |
В результате эксперимента построены графики изменения температуры воды от времени (рис. 7а), а также представлены следующие характеристики для различных режимов: потребляемая мощность N, затраченное время t и работа A, затраченная экспериментальной установкой на перемешивание от 40 до 60°С (рис. 7б).
Рис. 7.
Исследование эффективности перемешивания при 50 об/мин: (а) – зависимости изменения температуры воды от времени; (б) – энергетические характеристики; 1 – вращательное движение (режим 1); 2 – возвратно-вращательное движение, α = 113° (режим 2); 3 – возвратно-вращательное движение, α = 131° (режим 3); 4 – возвратно-вращательное движение, α = 147° (режим 4).
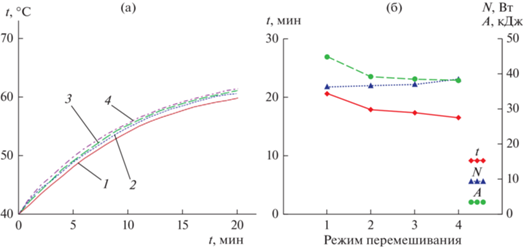
Анализ графиков на рис. 7 показывает, что применение перемешивающего устройства с возвратно-вращательным движением рабочего органа позволяет сократить время перемешивания. Сокращение времени составляет 2.75 мин для режима 2, 3.25 мин для режима 3 и 4 мин для режима 4, что составляет 13, 15 и 19% от времени перемешивания, затраченного при вращательном движении рабочего органа.
При средней частоте вращения рабочего органа 100 об/мин сравнительные испытания проводились на примере неравномерного вращательного движения и движения с остановками рабочего органа. Коэффициент неравномерности δ рассчитывался по формуле (6) Геометрические параметры зубчатых колес исполнительного механизма и характеристики режимов перемешивания указаны в табл. 2.
Таблица 2.
Характеристики механизмов для сравнительных испытаний при n = 100 об/мин
| R1, м | R2, м | e | δ | nin, об/мин | nimp, об/мин | |
|---|---|---|---|---|---|---|
| Режим 1 | Двигатель соединен напрямую, n = 100 об/мин | |||||
| Режим 2 | 0.035 | 0.015 | 0.28 | 2.127 | 75 | 100 |
| Режим 3 | 0.032 | 0.018 | 0.28 | 2.776 | 128.53 | 100 |
| Режим 4 | 0.035 | 0.015 | 0.32 | 3.243 | 75 | 100 |
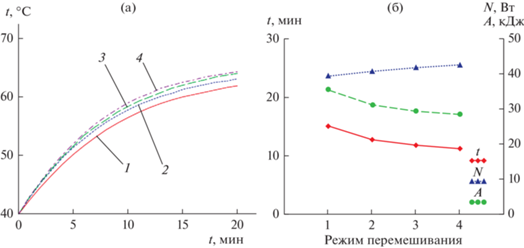
В результате эксперимента также построены графики зависимостей изменения температуры воды от времени (рис. 8а) и получены энергетические характеристики (рис. 8б).
Рис. 8.
Исследование эффективности перемешивания при 100 об/мин: (а) – зависимости изменения температуры воды от времени; (б) – энергетические характеристики; 1 – вращательное движение (режим 1); 2 – неравномерное движение, δ = 2.127 (режим 2); 3 – движение с остановками, δ = 2.776 (режим 3); 4 – движение с остановками, δ = 3.123 (режим 4).

Анализ полученных экспериментальных данных (рис. 8) показывает, что неравномерное движение и движение с остановками рабочего органа также позволяет повысить интенсивность перемешивания. Сокращение времени составляет 2.72 мин для режима 2, 2.94 мин для режима 3 и 3.72 мин для режима 4, что составляет 16, 18 и 23% от времени перемешивания, затраченного при вращательном движении рабочего органа.
При средней частоте вращения рабочего органа 200 об/мин сравнительные испытания проводились также на примере неравномерного вращательного движения и движения с остановками рабочего органа. Геометрические параметры зубчатых колес исполнительного механизма и характеристики режимов перемешивания указаны в табл. 3.
Таблица 3.
Характеристики механизмов для сравнительных испытаний при n = 200 об/мин
| R1, м | R2, м | e | δ | nin, об/мин | nimp, об/мин | |
|---|---|---|---|---|---|---|
| Режим 1 | Двигатель соединен напрямую, n = 200 об/мин | |||||
| Режим 2 | 0.037 | 0.013 | 0.28 | 1.874 | 108.3 | 200 |
| Режим 3 | 0.036 | 0.014 | 0.392 | 3.032 | 127.3 | 200 |
| Режим 4 | 0.037 | 0.013 | 0.475 | 5.605 | 108.3 | 200 |
В результате эксперимента, как и в первых двух случаях, построены графики зависимостей изменения температуры воды от времени (рис. 9а) и получены энергетические характеристики (рис. 9б).
Рис. 9.
Исследование эффективности перемешивания при 200 об/мин: (а) – зависимости изменения температуры воды от времени; (б) – энергетические характеристики; 1 – вращательное движение (режим 1); 2 – неравномерное движение, δ = 1.874 (режим 2); 3 – неравномерное движение, δ = 3.032 (режим 3); 4 – движение с остановками, δ = 5.605 (режим 4).
Анализ графиков на рис. 9 показывает, что применение перемешивающего устройства с неравномерным движением и движением с остановками рабочего органа позволяет сократить время перемешивания. Сокращение времени составляет 2.25 мин для режима 2, 3.25 мин для режима 3 и 3.83 мин для режима 4, что составляет 15, 21 и 25% от времени перемешивания, затраченного при вращательном движении рабочего органа.
Несмотря на повышение потребляемой планетарным приводом неравномерного движения мощности, затрачиваемая энергия уменьшается вследствие снижения времени перемешивания (рис. 7–9б).
ЗАКЛЮЧЕНИЕ
На базе оригинальной схемы планетарной передачи с эллиптическими зубчатыми колесами разработан надежный и компактный привод перемешивающего устройства. Переменная передаточная функция пары эллиптических колес при определенном соотношении радиусов цилиндрических зубчатых колес позволяет реализовать различные виды неравномерного движения рабочего органа, при этом обеспечивается простота настройки неравномерности вращения рабочего органа.
Сравнительные экспериментальные исследования в реакторе с традиционным равномерным вращением рабочего органа и с применением разработанного планетарного привода показали, что неравномерное движение мешалки повышает интенсивность теплообмена. Интенсификация процессов наблюдалась на всех исследуемых частотах вращения рабочего органа (50, 100, 200 об/мин), что привело к сокращению времени перемешивания на 13–25% в зависимости от режима перемешивания.
Включение в состав вертикального аппарата с мешалкой планетарного механизма неравномерного движения привело к повышению потребляемой мощности, однако суммарное количество энергии снизилось вследствие сокращения времени перемешивания. Прирост энергоэффективности также наблюдается при увеличении частоты вращения рабочего органа, однако на многих производствах такой способ не используется вследствие появления центральной воронки и усиленного пенообразования. В данном случае перспективным представляется применение разработанного планетарного привода неравномерного движения, которое позволяет уменьшить величину воронки [15] и повысить интенсивность перемешивания без увеличения скорости мешалки.
Работа выполнена с использованием оборудования ЦКП “Исследовательский центр пищевых и химических технологий” КубГТУ (CKP_3111), развитие которого было поддержано Министерством науки и высшего образования Российской Федерации (Соглашение № 075-15-2021-679).
ОБОЗНАЧЕНИЯ
| A | работа, кДж |
| а | большая полуось эллиптического зубчатого колеса, м |
| e | эксцентриситет пары эллиптических зубчатых колес |
| f | частота возвратно-вращательных движений рабочего органа, Гц |
| N | мощность, Вт |
| n | частота вращения, об/мин |
| R1, R2 | радиусы неподвижного и подвижного цилиндрических зубчатых колес, м |
| t | время, мин |
| u | передаточная функция механизма |
| α | угол качания рабочего органа, ° |
| δ | коэффициент неравномерности вращения рабочего органа |
| ρ | радиус зацепления эллиптических зубчатых колес, м |
| φ | угол поворота звена, рад |
| φ' | аналог угловой скорости звена |
| ω | угловая скорость звена, рад/с |
ИНДЕКСЫ
Список литературы
Barabash V.M., Abiev R.S., Kulov N.N. Theory and practice of mixing: A review // Theor. Found. Chem. Eng. 2018. V. 52. № 4. P. 473. [Барабаш В.М., Абиев Р.Ш., Кулов Н.Н. Обзор работ по теории и практике перемешивания // Теорет. основы хим. технологии. 2018. Т. 52. № 4. С. 367.]
Брагинский Л.Н., Бегачев В.И., Барабаш В.М. Перемешивание в жидких средах: Физические основы и инженерные методы расчета. Л.: Химия, 1984.
Поникаров И.И., Перелыгин О.А., Доронин В.Н., Гайнуллин М.Г. Машины и аппараты химических производств. М.: Машиностроение, 1989.
Сташевская О.В., Марцулевич Н.А., Федотов В.В. Расчет пусковых гидродинамических нагрузок на трехлопастные мешалки и их прочностной расчет // Известия Санкт-Петербургского государственного технологического института (технического университета). 2018. № 46. С. 93.
Синявский Ю.В. Усовершенствованный метод расчета мощности перемешивающего устройства // Научный журнал НИУ ИТМО. Серия: Процессы и аппараты пищевых производств. 2018. № 4. С. 3.
Григорьева А.Н., Абиев Р.Ш. Сравнительный анализ влияния геометрической формы рабочих колес перемешивающих устройств на эффективность суспендирования в системе жидкость–твердое // Известия Санкт-Петербургского государственного технологического института (технического университета). 2018. № 45. С. 94.
Григорьева А.Н., Абиев Р.Ш. К выбору типа и частоты вращения мешалки для эффективного перемешивания флокулянтов в воде // Вода и экология: проблемы и решения. 2020. № 2(82). С. 27.
Коган В.В. Определение влияния динамических характеристик смесителей на структурно-механические свойства рыбных кулинарных фаршей // Вестник Астраханского государственного технического университета. Серия: Рыбное хозяйство. 2020. № 1. С. 138.
Kumaresan T., Joshi J.B. Effect of impeller design on the flow pattern and mixing in stirred tanks // Chem. Eng. J. 2006. V. 115. № 3. P. 173.
Wójtowicz R., Lipin A.A., Talaga J. On the possibility of using of different turbulence models for modeling flow hydrodynamics and power consumption in mixing vessels with turbine impellers // Theor. Found. Chem. Eng. 2014. V. 48. № 4. P. 360. [Войтович Р., Липин A.A., Талага Я. О возможности использования различных моделей турбулентности для расчета гидродинамических и энергетических характеристик аппаратов с турбинными мешалками // Теорет. основы хим. технологии. 2014. Т. 48. № 4. С. 386.]
Войтович Р., Липин А.Г. Математическое моделирование гидродинамики смесителя с эксцентрически расположенной мешалкой // Изв. вузов. Химия и хим. технология. 2015. Т. 58. № 11. С. 83.
Vakili M.H., Esfahany M.N. CFD analysis of turbulence in a baffled stirred tank, a three-compartment model // Chem. Eng. Sci. 2009. V. 64. № 2. P. 351.
Бакланов Н.А. Перемешивание жидкостей. Л.: Химия, 1979.
Galletti C., Brunazzi E. On the main flow features and instabilities in an unbaffled vessel agitated with an eccentrically located impeller. Chem. Eng. Sci. 2008. V. 63. № 18. P. 4494.
Torubarov N.N., Malyshev R.M., Serov M.V. Apparatus with intracyclic variation of the velocity of the anchor agitator // Chem. Petrol. Eng. 2016. V. 52. № 5–6. P. 379. [Торубаров Н.Н., Малышев Р.М., Серов М.В. Аппараты с внутрицикловым изменением скорости движения якорной мешалки // Химическое и нефтегазовое машиностроение. 2016. № 6. С. 8.]
Wójtowicz R. Flow pattern and power consumption in a vibromixer // Chem. Eng. Sci. 2017. V. 172. P. 622.
Date T., Komoda Y., Suzuki H., Hidema R., Suzuki K. Application of a rotationally reciprocating plate impeller on crystallization process // J. Chem. Eng. Jpn. 2018. V. 51. № 2. P. 159.
Hiseman M.J.P., Laurent B.F.C., Bridgwater J., Wilson D.I., Parker D.J., North N., Merrifield D.R. Granular flow in a planetary mixer // Chem. Eng. Res. Des. 2002. V. 80. № 5. P. 432.
Мудров А.Г. Разработка пространственных перемешивающих устройств нового поколения, применяемых в сельском хозяйстве и промышленности (Том 1). Дис. … докт. техн. наук. Казань: КГСХА, 1999.
Kawano Y., Kiyoyama S., Shiomori K., Baba Y., Hano T. Hydrolysis of olive oil with lipase in a “VibroMixer” // J. Ferment. Bioeng. 1994. V. 78. № 4. P. 293.
Kamieński J., Wójtowicz R. Dispersion of liquid–liquid systems in a mixer with a reciprocating agitator // Chem. Eng. Process. 2003. V. 42. № 12. P. 1007.
Torubarov N.N., Malyshev R.M. Mixer with complex law governing agitator motion // Chem. Petrol. Eng. 2013. V. 49. № 3. P. 167. [Торубаров Н.Н., Малышев Р.М. Перемешивающие устройства со сложным законом движения мешалок // Химическое и нефтегазовое машиностроение. 2013. № 3. С. 19.]
Мудров А.Г. Конструкции и модель смешения в аппаратах с мешалкой // Известия КГАСУ. 2018. № 1. P. 226.
Torubarov N.N., Serov M.V., Malyshev R.M., Torubarov S.N. Design of actuator of the drives of nonstationary mixers // Chem. Petrol. Eng. 2018. V. 54. № 7–8. P. 552. [Торубаров Н.Н., Серов М.В., Малышев Р.М., Торубаров С.Н. Синтез исполнительных механизмов приводов нестационарных смесителей // Химическое и нефтегазовое машиностроение. 2018. № 8. С. 6.]
Prikhodko A.A. Experimental kinematic analysis of an intermittent motion planetary mechanism with elliptical gears // J. Meas. Eng. 2020. V. 8. № 3. P. 122.
Корн Г. Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1974.
Борисов А.В. Интенсификация перемешивания в аппаратах с использованием решетки крыловых профилей. Дис. … канд. техн. наук. М.: МГУИЭ, 2003.
Дополнительные материалы отсутствуют.
Инструменты
Теоретические основы химической технологии