

Журнал вычислительной математики и математической физики, 2023, T. 63, № 9, стр. 1513-1523
ЧИСЛЕННЫЙ АЛГОРИТМ ОПРЕДЕЛЕНИЯ ИСТОЧНИКА ДИФФУЗИОННО-ЛОГИСТИЧЕСКОЙ МОДЕЛИ ПО ДАННЫМ ИНТЕГРАЛЬНОГО ТИПА, ОСНОВАННЫЙ НА ТЕНЗОРНОЙ ОПТИМИЗАЦИИ
Т. А. Звонарева 1, 2, С. И. Кабанихин 2, 3, О. И. Криворотько 1, 2, 3, *
1 ИВМиМГ СО РАН
630090 Новосибирск, пр-кт Акад. Лаврентьева, 6, Россия
2 НГУ
630090 Новосибирск, ул. Пирогова, 2, Россия
3 ИМ им. С.Л. Соболева СО РАН
630090 Новосибирск, пр-кт Акад. Коптюга, 4, Россия
* E-mail: krivorotko.olya@mail.ru
Поступила в редакцию 09.12.2022
После доработки 09.12.2022
Принята к публикации 29.05.2023
- EDN: DFESUX
- DOI: 10.31857/S0044466923090193
Аннотация
Разработан алгоритм численного решения задачи определения источника в модели распространения информации в синтетических онлайн социальных сетях, описываемой уравнениями типа “реакции–диффузии”, по дополнительной информации о процессе в фиксированные моменты времени. Исследована степень некорректности задачи определения источника в параболическом уравнении, основанная на анализе сингулярных чисел линеаризованного оператора обратной задачи. Разработанный алгоритм основан на комбинации метода тензорной оптимизации и градиентного спуска с учетом регуляризации А.Н. Тихонова. Численные расчеты демонстрируют наименьшую относительную погрешность восстановленного источника, полученную разработанным алгоритмом в сравнении с классическими подходами. Библ. 26. Фиг. 4. Табл. 2.
ВВЕДЕНИЕ
Оценка последствий принимаемых решений в социальных и экономических сферах опирается на создание и исследование моделей управляемых систем. В этом направлении существенную помощь могут оказать аналогии с процессами из различных предметных областей (математическая физика, механика сплошной среды, геофизика и др.) с хорошо развитым математическим аппаратом (см. [1]).
В настоящей работе рассматривается начально-краевая задача для диффузионно-логистической модели
(1)
$\begin{gathered} {{u}_{t}} = d{{u}_{{xx}}} + \left( {1 - \frac{u}{K}} \right)r(t)u,\quad {{l}_{1}} \leqslant x \leqslant {{l}_{2}},\quad t \geqslant 1, \hfill \\ u(x,1) = Q(x),\quad {{l}_{1}} \leqslant x \leqslant {{l}_{2}}, \hfill \\ {{u}_{x}}({{l}_{1}},t) = {{u}_{x}}({{l}_{2}},t) = 0,\quad t \geqslant 1, \hfill \\ \end{gathered} $Подобное уравнение “реакции–диффузии” было рассмотрено в статье А.Н. Колмогорова, И.Г. Петровского и Н.С. Пискунова [3], в которой $u(x,t)$ означала концентрацию исследуемого вида в популяции при ${{Q}_{{\max }}} = 1$, $K = 1$. В этом случае предельная скорость перемещения популяции равна $v(t) = 2\sqrt {dr(t)} $.
Если ввести функцию потока $\Psi (x,t)$, характеризующую количество вовлеченных пользователей, проходящую через точку с координатой $x$ в единицу времени в момент $t$, то закон сохранения для модели (1) примет вид
В случае, когда функции потока $\Psi (x,t)$ и плотности $u(x,t)$ связаны соотношением Фика
уравнение из модели (1) примет видЗамечание. Начально-краевая задача об определении источника $\varphi (x)$ может быть записана в виде
(2)
$\begin{gathered} \frac{{\partial{ \tilde {u}}}}{{\partial t}} = \left( {1 - \frac{{\tilde {u}}}{K}} \right)r(t)\tilde {u} + d\frac{{{{\partial }^{2}}\tilde {u}}}{{\partial {{x}^{2}}}} + \varphi (x)k(x,t),\quad t \in (1,T),{\kern 1pt} x \in ({{l}_{1}},{{l}_{2}}), \hfill \\ \tilde {u}(x,1) < 0,\quad x \in ({{l}_{1}},{{l}_{2}}), \hfill \\ {{{\tilde {u}}}_{x}}({{l}_{1}},t) = {{{\tilde {u}}}_{x}}({{l}_{2}},t) = 0,\quad t \in (1,T). \hfill \\ \end{gathered} $Определение источника $\varphi (x)$ крайне важно при моделировании динамики популяции, распространения информации в социальных сетях, приложениях математической физики, так как решение $\tilde {u}(x,t)$ сильно зависит от линейной части члена, отвечающего за реакцию. В физических приложениях линейная часть часто неизвестна или известна частично, и $\varphi (x)$ нельзя измерить напрямую, поскольку он является результатом смешанного влияния нескольких факторов. Таким образом, в большинстве случаев $\tilde {u}(x,t)$ не доступны одновременно для всех $x$ и всех моментов времени $t$. В работе разработан эффективный алгоритм определения функции источника $Q(x)$ в начально-краевой задаче (1) по дополнительной информации о процессе в фиксированные моменты времени.
В Институте системного программирования РАН разрабатываются подходы анализа социальных процессов, основанные на онтологии, графовых структурах, методах машинного обучения и искусственного интеллекта (см. [5]). В настоящей работе предложен упрощенный подход описания процесса распространения информации в онлайн социальных сетях, основанный на описании процессов посредством дифференциальных уравнений.
Статья организована следующим образом. В разд. 1 сформулирована обратная задача (задача об источнике) для модели (1) в классической и вариационной постановках и исследован линеаризованный оператор обратной задачи на степень некорректности. В разд. 2 сформулирован комбинированный алгоритм численного решения задачи об источнике, основанный на методах тензорной оптимизации и градиентного типа. В разд. 3 приведены результаты и анализ численных расчетов определения функции источника распространения информации в онлайн социальных сетях по синтетическим данным о количестве вовлеченных пользователей в фиксированные моменты времени. В заключении сформулированы выводы по статье и направления дальнейших исследований.
1. ПОСТАНОВКА ОБРАТНОЙ ЗАДАЧИ
В обратной задаче, в отличие от прямой, помимо функции $u(x,t)$ неизвестной является и начальная функция плотности $Q(x)$. Рассматривается дополнительная информация следующего вида:
(3)
$\sum\limits_{i = 1}^{{{N}_{1}}} \;u({{x}_{i}},{{t}_{k}}) = {{f}_{k}},\quad k = 1, \ldots ,{{N}_{2}}.$Благодаря неравенствам Карлемана, метод, введенный Бухгеймом и Клибановым (см. [7]), позволил установить важные результаты, включающие неравенства устойчивости, связывающие восстанавливаемую функцию источника с наблюдениями на части области $\omega \times (1,T)$, $\omega \subset ({{l}_{1}},{{l}_{2}})$, и наблюдения на всей области $({{l}_{1}},{{l}_{2}})$ в фиксированный момент времени $t{\kern 1pt} *$ (см. [8, 9]). В [10] был предложен подход определения функции источника по дополнительной информации о решении в фиксированный момент времени и точки пространства в одномерном случае, получены результаты единственности и устойчивости решения. В [11] В. Исаков получил теорему условной устойчивости решения задачи об источнике для модели (2) с необходимостью дополнительных граничных наблюдений. В [12] А. Хасанов использовал подход слабого решения для минимизации функционала невязки. Больше теоретических и практических результатов приведены в современных работах и ссылках в них (см. [13, 14]).
Для описания быстротекущих процессов (движения плазмы, модели теплопроводности, распространение информации в социальных сетях) в [15, 16] предложен подход регуляризации параболической системы (2) путем добавления второй производной по времени с малым параметром $\varepsilon $ в качестве коэффициента. В нашем случае
(4)
$\begin{gathered} \varepsilon {{u}_{{tt}}} + {{u}_{t}} = d{{u}_{{xx}}} + \left( {1 - \frac{u}{K}} \right)r(t)u,\quad {{l}_{1}} \leqslant x \leqslant {{l}_{2}},\quad t \geqslant 1, \hfill \\ u(x,1) = Q(x),\quad {{u}_{t}}(x,1) = 0,\quad {{l}_{1}} \leqslant x \leqslant {{l}_{2}}, \hfill \\ {{u}_{x}}({{l}_{1}},t) = {{u}_{x}}({{l}_{2}},t) = 0,\quad t \geqslant 1. \hfill \\ \end{gathered} $Гиперболическая модель имеет заметные преимущества при использовании явных схем численного решения прямых и сопряженных задач. Особенно ярко эти преимущества по сравнению с параболической моделью (2) проявляются при использовании подробных пространственных сеток, применение которых стало возможным с появлением вычислительных систем сверхвысокой производительности. В то же время добавленный член имеет сингулярный характер. Вопрос о близости решений сингулярно возмущенных и невозмущенных уравнений впервые исследован в работах А.Н. Тихонова [17, 18]. В [16] показано, что оптимальным представляется выбор параметра $\varepsilon $ в виде:
где ${{h}_{x}}$ – шаг по пространственной сетке, $V$ – характерная скорость диффузионного процесса. При этом, с одной стороны, обеспечивается близость решений параболической и гиперболической моделей (см. [15]), а с другой – обеспечивается заметный вычислительный эффект при использовании явных схем.1.1. Исследование сингулярных чисел оператора линеаризованной обратной задачи
Используя дискретизацию начально-краевой задачи (1), обратную задачу определения $q = ({{q}_{0}}, \ldots ,{{q}_{5}}) = (Q(1), \ldots ,Q(6))$ по дополнительной информации вида (3) можно представить в виде системы линейных алгебраических уравнений
где $A$ – матрица размера ${{N}_{2}} \times N$, а $q$ и $f = ({{f}_{1}}, \ldots ,{{f}_{{{{N}_{2}}}}})$ – векторы размерности $N$ и ${{N}_{2}}$ соответственно. Обратную задачу (4), (3) аналогично можно представить в виде ${{A}_{\varepsilon }}q = f$.Зависимость решения от возмущения правой части $f$ в случае невырожденной матрицы $A$ для возмущенной задачи
имеет вид $A\delta q = \delta f$, откуда $\delta q = {{A}^{{ - 1}}}\delta f$, $\left\| {\delta q} \right\| \leqslant \left\| {{{A}^{{ - 1}}}} \right\|\left\| {\delta f} \right\|$. Кроме того, $\left\| A \right\|\left\| q \right\| \geqslant \left\| f \right\|$.Из этих соотношений мы имеем неулучшаемую оценку для относительной ошибки решения:
(5)
$\frac{{\left\| {\delta q} \right\|}}{{\left\| q \right\|}} \leqslant \left\| A \right\|\left\| {{{A}^{{ - 1}}}} \right\|\frac{{\left\| {\delta f} \right\|}}{{\left\| f \right\|}}.$В случае возмущения матрицы оценка (5) принимает вид
Известно, что число обусловленности выражается через сингулярные числа матрицы следующим образом:
где ${{\sigma }_{1}}(A)$ и ${{\sigma }_{p}}(A)$ – максимальное и минимальное сингулярные числа матрицы $A$, $p = \min (N,{{N}_{2}})$.После линеаризации и дискретизации обратных задач (1), (3) (см. [19]) и (4), (3) при ${{N}_{1}} = 5$, ${{N}_{2}} = 22$ получим дискретные аналоги операторов обратных задач. В численных расчетах $K = 25$, $d = 0.01$, и функция $r(t)$ имеет вид:
Фиг. 1.
Графики убывания сингулярных чисел операторов $A$ (черная линия с ромбами) и ${{A}_{\varepsilon }}$ при $\varepsilon = 0.1$ (оранжевая линия с кругами) линеаризованных обратных задач (1), (3) и (4), (3) в логарифмической шкале.
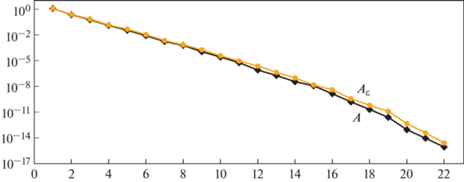
Таким образом, числа обусловленности матриц $A$ и ${{A}_{\varepsilon }}$ имеют порядок ${{10}^{{16}}}$ и ${{10}^{{15}}}$ соответственно. Это означает, что решение линеаризованной обратной задачи неустойчиво. Добавление малого параметра $\varepsilon $ со второй производной по времени не значительно уменьшает число обусловленности матрицы ${{A}_{\varepsilon }}$. В следующем разделе обратная задача сведена к задаче минимизации функционала с учетом регуляризирующего слагаемого.
1.2. Вариационная постановка обратной задачи
Пусть $u(x,t) \in {{L}^{2}}(({{l}_{1}},{{l}_{2}}) \times (1, + \infty ))$. Тогда обратную задачу можно свести к соответствующей задаче минимизации следующего целевого функционала:
(6)
$J(q) = \frac{{T - 1}}{{{{N}_{2}}}}\sum\limits_{k = 1}^{{{N}_{2}}} {{\left| {\sum\limits_{i = 1}^{{{N}_{1}}} \,u({{x}_{i}},{{t}_{k}};q) - {{f}_{k}}} \right|}^{2}},$Для данной обратной задачи также был сформулирован регуляризирующий функционал А.Н. Тихонова (см. [17, 20])
(7)
${{J}_{T}}(q) = \frac{{T - 1}}{{{{N}_{2}}}}\sum\limits_{k = 1}^{{{N}_{2}}} {{\left| {\sum\limits_{i = 1}^{{{N}_{1}}} u({{x}_{i}},{{t}_{k}};q) - {{f}_{k}}} \right|}^{2}} + \alpha \sum\limits_{j = 0}^{N - 1} {{\left| {{{q}_{j}} - q_{j}^{0}} \right|}^{2}}$2. МЕТОДЫ ОПТИМИЗАЦИИ
Задача определения вектора $q \in {{R}^{6}}$ является некорректной, а именно, как показано в п. 1.1, решение неустойчиво (число обусловленности достигает порядка ${{10}^{{16}}}$). Более того, функция $Q(x)$ определяется на всем интервале $x \in [{{l}_{1}},{{l}_{2}}]$ с помощью интерполяции вектора $q$ кубическими сплайнами, что порождает неединственность решения.
Дополнительная информация (3) обратной задачи задана в дискретном виде.
В [19] были проведены расчеты для более полных данных $u({{x}_{i}},{{t}_{k}}) = {{f}_{{ik}}}$, $i = 1, \ldots ,{{N}_{1}}$, $k = 1, \ldots ,{{N}_{2}}$, с применением комбинации методов глобальной оптимизации (метод роя частиц) и градиентных подходов. Для решения поставленной обратной задачи был применен метод оптимизации тензорного поезда, который сводит функцию нескольких переменных к тензору (см. [21]) и является в сравнении с природоподобными алгоритмами эффективнее без потери точности для многомасштабных задач.
2.1. Метод тензорного разложения функционала
Метод глобальной оптимизации тензорного поезда (Tensor Train global optimization, TT) (см. [21]) заменяет исходную задачу оптимизации на эквивалентную задачу поиска максимума по модулю. Для этого исходная функция непрерывно и монотонно отображается на часть интервала $[0; + \infty )$ и после дискретизации преобразуется в тензор.
Однако число элементов в таком тензоре растет экспоненциально с ростом числа искомых параметров. Поэтому идеей метода является аппроксимация тензора методом TT-CROSS (см. [22]), который получает приближение тензора в ТТ-формате. Этот формат представляет собой разложение, в котором исходный тензор размерности $N$ сводится к $N$ тензорам размерности 3.
Для вычислительных экспериментов был адаптирован пакет программ ttpy на языке программирования Python. В данном случае исходный функционал $J(q)$ отображается с помощью функции $g(J(q) - \alpha )$ и вводится сетка с $n$ узлами по каждому из $N$ направлений, а тензор значений функции $g(q)$ обозначается через $G$. Тогда алгоритм метода имеет следующий вид:
0. Для каждого $i = 1, \ldots ,N - 1$:
• Случайным образом генерируется тензор ${{\hat {G}}_{i}}({{j}_{1}};{{j}_{2}};{{j}_{3}})$ и считается $QR$-разложение матрицы развертки ${{\hat {G}}_{i}}({{j}_{1}}{{j}_{2}};{{j}_{3}}) = {{Q}_{i}}{{R}_{i}}$.
• Процедура maxvol(${{Q}_{i}}$) находит набор номеров строк $\{ p\} $, соответствующий квадратной подматрице максимального объема (см. [23]).
• Используя значения сетки и полученный на предыдущем шаге ${{\hat {q}}_{{i - 1}}}$, генерируется массив ${{\hat {q}}_{i}}$, из которого выбираются строки с номерами из $\{ p\} $.
1. Пока число итераций меньше ${{n}_{{{\text{swp}}}}}$ (параметр функции min_func в пакете ttpy), чередуются следующие действия:
(a) Для $i = N - 1, \ldots ,1$:
– На основе ${{\hat {q}}_{i}}$ и ${{\hat {q}}_{{i + 1}}}$ генерируется множество потенциальных решений $M$ и обновляется сдвиг $\alpha $.
– Массив значений функционала $J(\tilde {q})$, $\tilde {q} \in M$, представляется в виде тензора ${{A}_{i}}({{j}_{1}};{{j}_{2}};{{j}_{3}})$ и считается сингулярное разложение матрицы развертки ${{A}_{i}}({{j}_{2}}{{j}_{3}};{{j}_{1}}) = {{U}_{i}}{{S}_{i}}({{V}_{i}}){\kern 1pt} *$.
– Процедура rect_maxvol(${{U}_{i}}$) находит набор номеров строк $\{ p\} $, соответствующий прямоугольной подматрице максимального объема (см. [24]).
– Используя значения сетки и ${{\hat {q}}_{{i + 1}}}$, генерируется массив ${{\hat {q}}_{i}}$, из которого выбираются строки с номерами из $\{ p\} $.
(б) Для $i = 0, \ldots ,N - 2$:
– На основе ${{\hat {q}}_{i}}$ и ${{\hat {q}}_{{i + 1}}}$ генерируется множество потенциальных решений $M$ и обновляется сдвиг α.
– Массив значений функционала $J(\tilde {q})$, $\tilde {q} \in M$, представляется в виде тензора ${{A}_{i}}({{j}_{1}};{{j}_{2}};{{j}_{3}})$ и считается $QR$-разложение матрицы развертки ${{A}_{i}}({{j}_{1}}{{j}_{2}};{{j}_{3}}) = {{Q}_{i}}{{R}_{i}}$.
– Процедура rect_maxvol(${{Q}_{i}}$) находит набор номеров строк $\{ p\} $, соответствующий прямоугольной подматрице максимального объема.
– Используя значения сетки и ${{\hat {q}}_{i}}$, генерируется массив ${{\hat {q}}_{{i + 1}}}$, из которого выбираются строки с номерами из $\{ p\} $.
На нечетных итерациях выполняется вариант (a), на четных итерациях – (б).
Данный метод использует только некоторые строки и столбцы изначального тензора значений функции $g(q)$, из-за чего может не найти точку глобального оптимума, а лишь обнаружить близкое к оптимальному значение. Поэтому для увеличения точности решения обратной задачи мы рассмотрели комбинированный метод.
2.2. Комбинированный метод
Данный метод состоит в последовательном применении метода глобальной оптимизации ТТ и локального многоуровневого градиентного метода (МГМ) (см. [25]). Ранее уже были проведены численные эксперименты для подобной обратной задачи, решаемой с помощью МГМ (см. [26]). Алгоритм МГМ имеет следующий вид:
В качестве начального приближения для МГМ был взят результат метода ТТ. Скорость сходимости по функционалу метода МГМ имеет порядок $O\left( {{{m}^{{ - 2}}}} \right)$.
3. ЧИСЛЕННЫЕ ЭКСПЕРИМЕНТЫ
Решение задач минимизации (6) и (7) проводилось с помощью методов ТТ, ТТ в комбинации с МГМ (ТТ + МГМ). Сравнение результатов проведено с результатом комбинации методов роя частиц и МГМ для синтетических данных обратной задачи. Вычисления проводились на вычислительном узле с двумя процессорами Intel Xeon Gold 6248R, количество ядер в каждом процессоре – 24, частота – 3 Гц, 384 Гб оперативной памяти.
3.1. Входные параметры
Прямая задача решается конечно-разностным методом на равномерной сетке в замкнутой области $\bar {D} = \{ (x,t)|{{l}_{1}} \leqslant x \leqslant {{l}_{2}},\;1 \leqslant t \leqslant T\} $:
Для применения классического непрерывного подхода функция начальной плотности $Q(x)$ определяется из вектора ${{q}_{{{\text{ex}}}}}$ (см. табл. 2) интерполяцией кубическими сплайнами (см. [26]).
Прямая задача (1) решается с помощью явной конечно-разностной схемы с порядком аппроксимации $O(\tau + {{h}^{2}})$.
Положим в численных расчетах ${{l}_{1}} = 1$, ${{l}_{2}} = 6$, $T = 24$, ${{N}_{x}} = 50$ и ${{N}_{t}} = 575$ (см. [26]). И в случае функционала А.Н. Тихонова $q_{j}^{0} \in [0,6]$ расположены равномерно, т.е. ${{q}^{0}} = (6,4.8,3.6,2.4,1.2,0)$.
В качестве синтетических данных ${{f}_{k}}$ были взяты значения решения прямой задачи в каждой десятой точке по $x$ и в каждой двадцать пятой точке по $t \geqslant 50$, т.е. ${{N}_{1}} = 6$ и ${{N}_{2}} = 22$. Значения параметров ${{q}_{{{\text{ex}}}}}$ в табл. 2 эмитируют реальные данные новостного сайта Digg.com, представленные в [2].
Относительная ошибка вычислялась по формуле
3.1.1. Параметры ТТ. Исходный функционал отображался с помощью функции $g(q) = \pi {\text{/}}2 - \operatorname{arctg} (J(q) - \alpha )$. Для всех $N$ направлений выбирался интервал изменения параметров $[0,6]$, а максимально возможный ранг тензоров в разложении ${{r}_{{{\text{max}}}}} = 7$ и количество итераций во всех численных экспериментах ${{n}_{{{\text{swp}}}}} = 10$.
При увеличении количества узлов $n$ по каждому из направлений растет вычислительная сложность (см. п. 3.3), поэтому в расчетах было выбрано оптимальное по времени и значению целевого функционала число узлов $n = 51$.
3.1.2. Параметры МГМ. На каждой итерации параметр спуска определяется на отрезке $[0,{{\zeta }_{{{\text{max}}}}}]$ с шагом ${{\zeta }_{h}}$. А градиент вычислялся через решение сопряженной задачи (см. [26]).
3.2. Результаты численных экспериментов
Было выявлено, что при значениях $n \leqslant 50$ изменение параметров ${{r}_{{{\text{max}}}}}$ и ${{n}_{{{\text{swp}}}}}$ никак не влияет на результат работы программы, лишь увеличивая время ее работы. А минимальные значения функционала $J(q) = 6.16 \times {{10}^{0}}$ и погрешности $\delta = 2.04 \times {{10}^{{ - 2}}}$ достигались при $n = 51$, ${{r}_{{{\text{max}}}}} = 7$ и ${{n}_{{{\text{swp}}}}} = 10$. Однако решение обратной задачи еще далеко от точного, поэтому для уточнения применялся МГМ.
В табл. 1 и 2 и на фиг. 2 представлены результаты решения задачи минимизации целевого функционала методом ТТ, комбинацией ТТ + МГМ, ТТ + МГМ с регуляризацией А.Н. Тихонова и комбинацией стохастического глобального метода роя частиц (МРЧ) + МГМ. Можно заметить, что метод ТТ работает почти в 2 раза дольше комбинации МРЧ + МГМ, но находит решение лучше в смысле значений погрешности. Применение МГМ к методу ТТ приводит к уменьшению функционала, но незначительно влияет на погрешность, а применение регуляризации А.Н. Тихонова уменьшает погрешность, но увеличивает время работы программы более чем в 2 раза. Таким образом, наименьшее значение погрешности $\delta = 1.29 \times {{10}^{{ - 2}}}$ достигается при работе регуляризованного комбинированного метода ТТ + МГМ.
Таблица 1.
Результаты, ${{t}_{{{\text{ЭВМ}}}}}$ – время работы программы
| Метод | Функционал | $\delta $ | ${{t}_{{{\text{ЭВМ}}}}}$, ч |
|---|---|---|---|
| ТТ | $J(q) = 6.16 \times {{10}^{0}}$ | $2.04 \times {{10}^{{ - 2}}}$ | 1.09 |
| ТТ + МГМ | $J(q) = 7.43 \times {{10}^{{ - 3}}}$ | $1.89 \times {{10}^{{ - 2}}}$ | 1.1 |
| ТТ + МГМ + рег. | ${{J}_{T}}(q) = 1.56 \times {{10}^{{ - 1}}}$ | $1.29 \times {{10}^{{ - 2}}}$ | 2.55 |
| МРЧ + МГМ | $J(q) = 6.67 \times {{10}^{{ - 2}}}$ | $1.03 \times {{10}^{0}}$ | 0.64 |
Таблица 2.
Значения точного ${{q}_{{{\text{ex}}}}}$ и найденных решений обратной задачи (1), (3)
| Параметр | ${{q}_{0}}$ | ${{q}_{1}}$ | ${{q}_{2}}$ | ${{q}_{3}}$ | ${{q}_{4}}$ | ${{q}_{5}}$ |
|---|---|---|---|---|---|---|
| ${{q}_{{{\text{ex}}}}}$ | 5.8 | 1.7 | 1.9 | 1 | 0.95 | 0.7 |
| ${{q}_{{{\text{ТТ}}}}}$ | 5.76 | 1.44 | 2.639 | 0.84 | 0.96 | 0.72 |
| ${{q}_{{{\text{ТТ}} + {\text{МГМ}}}}}$ | 5.758 | 1.316 | 2.556 | 0.813 | 0.965 | 0.801 |
| ${{q}_{{{\text{ТТ}} + {\text{МГМ}} + {\text{рег}}{\text{.}}}}}$ | 5.759 | 1.899 | 1.456 | 0.986 | 1.246 | 0.415 |
| ${{q}_{{{\text{МРЧ}} + {\text{МГМ}}}}}$ | 1.629 | 0.197 | 3.611 | 4.307 | 1.255 | 2.076 |
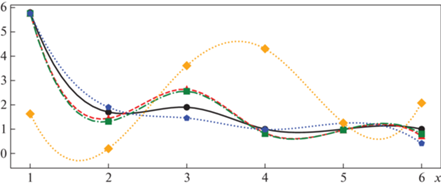
Фиг. 2.
Восстановленная начальная функция плотности активных пользователей $Q(x)$. Непрерывной черной линией с кругами изображено точное решение обратной задачи, красной штриховой линией с треугольниками – решение, полученное методом ТТ, зеленой пунктирной линией с квадратами – решение, полученное комбинацией ТТ + МГМ, синей пунктирной линией с пятиугольниками – решение, полученное с помощью комбинации ТТ + МГМ с регуляризацией А.Н. Тихонова, и оранжевой пунктирной линией с ромбами изображено решение, полученное комбинацией МРЧ + МГМ.
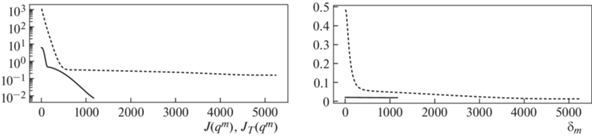
На фиг. 3 непрерывными линиями изображены кривые, полученные комбинацией ТТ + + МГМ, а пунктирной линией – кривые, полученные комбинированным методом с регуляризацией А.Н. Тихонова. Из фиг. 3 следует, что функционал (6) убывает быстрее, а функционал (7) не достигает минимального значения. Это связано с выбором ${{q}^{0}}$, что не позволяет функционалу достигнуть похожих значений. А погрешность регуляризованного комбинированного метода хоть и имеет сравнительно большие значения на первых итерациях, но достигает значения меньшего, чем в случае отсутствия регуляризации.
3.3. Вычислительная сложность
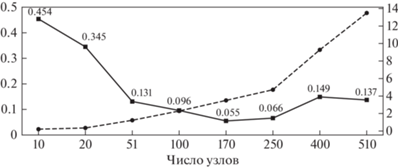
Был проведен ряд численных экспериментов для фиксированных параметров метода ТТ ${{r}_{{{\text{max}}}}} = 7$ и ${{n}_{{{\text{swp}}}}} = 10$ и набора $n = \{ 10$, 20, 51, 100, 170, 250, 400, $510\} $, который показал, что при увеличении числа узлов $n$ метода ТТ уменьшаются значения функционала и погрешности, но критически увеличивается время работы программы, что продемонстрировано на фиг. 4. В результате было выбрано значение $n = 51$ с учетом оптимального времени работы и приемлемого значения функционала.
4. ЗАКЛЮЧЕНИЕ
Математическая модель типа “реакции–диффузии”, возникающая в биологии, экологии и других приложениях, была адаптирована для описания процесса распространения информации в онлайн социальных сетях. Особенность моделирования состояла в описании социальных процессов в дискретном пространстве с неизвестным источником. В работе численно исследована и решена задача восстановления источника распространения информации по синтетическим данным интегрального типа в фиксированные моменты времени. Анализ степени убывания сингулярных чисел линеаризованного оператора показал необходимость применения методов регуляризации. Разработанный алгоритм решения обратной задачи основан на комбинации вариации метода покрытий и градиентного метода с применением регуляризации А.Н. Тихонова. Было проведено сравнение с природоподобным алгоритмом и показано преимущество использования комбинации метода тензорной оптимизации и градиентного метода с регуляризацией А.Н. Тихонова.
Список литературы
Четверушкин Б.Н., Осипов В.П., Балута В.И. Подходы к моделированию последствий принятия решений в условиях противодействия // Препринт ИПМ им. М.В. Келдыша. 2018. № 43. 15 с.
Wang F., Wang H., Xu K., Wu J., Jia X. Characterizing Information Diffusion in Online Social Networks with Linear Diffusive Model // Proceed. of ICDCS. 2013. P. 307–316.
Колмогоров А.Н., Петровский И.Г., Пискунов Н.С. Исследование уравнения диффузии, соединенной с возрастанием вещества, и его применение к одной биологической проблеме // Бюлл. МГУ. Сер. А. Математика и механика. 1937. Т. 1. № 6. С. 1–26.
Владимиров В.С. Уравнения математической физики. М.: Наука, 1981.
Самохвалов Д.И. Определение аккаунтов злоумышленников в социальной сети ВКонтакте при помощи методов машинного обучения // Тр. Института системного программирования РАН. 2020. Т. 32. № 3. С. 109–117.
Kabanikhin S. Definitions and examples of inverse and ill-posed problems // J. Inverse Ill-Posed Probl. 2009. V. 16. № 4. P. 317–357.
Бухгейм А.Л., Клибанов М.В. Единственность в целом одного класса многомерных обратных задач // Докл. АН СССР. 1981. Т. 260. № 2. С. 269–272.
Yamamoto M., Zou J. Simultaneous reconstruction of the initial temperature and heat radiative coefficient // Inverse Problems. 2001. V. 17. P. 1181.
Bellassoued M., Yamamoto M. Inverse source problem for a transmission problem for a parabolic equation // J. Inverse Ill-Posed Probl. 2006. V. 14(1). P. 47–56.
Cristofol M., Garnier J., Hamel F., Roques L. Uniqueness from pointwise observations in a multi-parameter inverse problem // Commun. Pure and Appl. Analys. 2012. V. 11(1). P. 173–188.
Isakov V. Inverse Problems for Partial Differential Equations. New York: Springer, 2017.
Hasanov A. Simultaneous determination of source terms in a linear parabolic problem from the final overdetermination: Weak solution approach // J. Math. Analys. Appl. 2007. V. 330. Iss. 2. P. 766–779.
Penenko A., Mukatova Z. Inverse modeling of diffusion-reaction processes with image-type measurement data // 2018 11th Inter. Multiconference Bioinformatics of Genome Regulation and Structure/Systems Biology (BGRS/SB). 2018. P. 39–43.
Kaltenbacher B., Rundell W. The inverse problem of reconstructing reaction–diffusion systems // Inverse Problems. 2020. V. 36. P. 065011.
Моисеев Т.Е., Мышецкая Е.Е., Тишкин В.Ф. О близости решений невозмущенных гиперболизированных уравнений теплопроводности для разрывных начальных данных // Докл. АН. Математика. 2018. Т. 481. № 6. С. 605–609.
Четверушкин Б.Н., Ольховская О.Г. Моделирование процесса лучистой теплопроводности на высокопроизводительных вычислительных системах // Докл. АН. Математика, информатика, процессы управления. 2020. Т. 491. № 1. С. 111–114.
Тихонов А.Н. Об устойчивости обратных задач // Докл. АН СССР. 1943. Т. 39. № 5. С. 195–198.
Тихонов А.Н. О зависимости решений дифференциальных уравнений от малого параметра // Матем. сб. 1948. Т. 22(64). № 2. С. 193–204.
Krivorotko O., Zvonareva T., Zyatkov N. Numerical solution of the inverse problem for diffusion-logistic model arising in online social networks // Commun. Comput. Info. Sci. 2021. V. 1476. P. 444–459.
Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Регуляризирующие алгоритмы и априорная информация. М.: Наука, 1983.
Zheltkova V.V., Zheltkov D.A., Grossman Z., Bocharov G.A., Tyrtyshnikov E.E. Tensor based approach to the numerical treatment of the parameter estimation problems in mathematical immunology // J. Inverse Ill-Posed Probl. 2018. V. 26. № 1. P. 51–66.
Oseledets I.V., Tyrtyshnikov E.E. TT-cross approximation for multidimensional arrays // Linear Algebra Appl. 2010. V. 432. № 1. P. 70–88.
Goreinov S.A., Oseledets I.V., Savostyanov D.V., Tyrtyshnikov E.E., Zamarashkin N.L. How to Find a Good Submatrix // Matrix Methods: Theory, Algorithms and Appl. 2010. P. 247–256.
Mikhalev A., Oseledets I. Rectangular maximum-volume submatrices and their applications // Linear Algebra Appl. 2018. V. 538. P. 187–211.
Gasnikov A.V., Nesterov Y.E. Universal method for stochastic composite optimization problems // Comput. Math. Math. Phys. 2018. V. 58. № 1. P. 48–64.
Звонарева Т.A., Криворотько О.И. Сравнительный анализ градиентных методов определения источника диффузионно-логистической модели // Ж. вычисл. матем. и матем. физ. 2022. Т. 62. № 4. С. 694–704.
Дополнительные материалы отсутствуют.
Инструменты
Журнал вычислительной математики и математической физики