

Космические исследования, 2022, T. 60, № 3, стр. 227-234
Методика оценивания робастности автономной системы навигации космического аппарата на основе теории планирования эксперимента
А. Д. Голяков 1, И. В. Фоминов 1, *
1 Военно-космическая академия им. А.Ф. Можайского
Санкт-Петербург, Россия
* E-mail: i.v.fominov@gmail.com
Поступила в редакцию 04.08.2021
После доработки 21.09.2021
Принята к публикации 24.11.2021
- EDN: CTAUSX
- DOI: 10.31857/S0023420622030049
Аннотация
Предложена методика оценивания робастности автономной системы навигации космического аппарата к воздействию возмущающих факторов различной физической природы. В основу методики положена методология Г. Тагути и теория планирования эксперимента, в соответствии с которой получены расчетные соотношения для оценивания робастности автономной системы навигации космического аппарата к различным возмущениям орбитального полета. Адекватность методики подтверждена на примере автономной системы навигации космического аппарата, включающей бортовые оптико-электронные, радиотехнические и вычислительные средства. Предложенная методика обладает универсальностью и может быть применена к системам навигации других подвижных объектов.
ВВЕДЕНИЕ
Эксплуатация систем навигации (СН) космических аппаратов, как правило, происходит в условиях воздействия определенного ряда возмущающих факторов, которые способны снизить не только качество решения навигационной задачи, но и безопасность полета [1–5]. В связи с этим возмущающие факторы (ВФ) и уровень последствий при их возникновении подвергаются подробным исследованиям на стадии проектирования.
В зависимости от места происхождения возмущающие факторы СН КА подразделяются на внутренние и внешние. К внутренним возмущающим факторам относятся метрологические отказы средств измерений параметров движения КА, сбои навигационных вычислителей, ошибки, возникающие в программном обеспечении при реализации навигационных алгоритмов. Внешними возмущающими факторами являются как естественные помехи окружающей среды, вызывающие случайные и систематические погрешности при определении навигационных параметров (НП), так и искусственно создаваемые воздействия, способные блокировать навигационные сигналы или производить их фальсификацию, например, путем спуфинга [6].
Для борьбы с внутренними и внешними источниками возмущений используются технические и алгоритмические способы, которые позволяют своевременно парировать процессы, обусловленные последствиями возникновения ВФ и приводящие к снижению точности навигации КА [7–11]. Однако эти способы приводят к усложнению аппаратных и программных средств навигационных систем и, как следствие, к росту стоимости СН КА.
Снижение чувствительности характеристик точности оцениваемых НП к воздействиям ВФ может быть достигнута на основе разработки робастных СН КА в рамках методологии робастного проектирования по Тагути. Под робастностью СН КА понимается свойство, которое характеризует минимальную чувствительность к факторам, вызывающим снижение показателей ее качества функционирования, в том числе показателей точности. При создании робастных СН КА могут использоваться методы, основанные на построении физических или математических моделей ВФ, на экспертной оценке воздействия ВФ на характеристики исследуемых систем, на теории параметрического планирования эксперимента и других подходах.
С помощью параметрического планирования эксперимента [12] можно найти такие характеристики СН КА, а также режимы ее эксплуатации, при которых чувствительность показателей точности СН КА к ВФ минимальна. При выполнении этого условия разрабатываемая СН КА приобретает свойство робастности.
Во многих практических случаях оценивание чувствительности показателей точности СН КА к ВФ сопровождается натурными испытаниями, что, во-первых, не всегда возможно реализовать, а во-вторых, требует значительных временных и финансовых затрат. В этой связи целесообразно применить методы, в основу которых положено имитационное моделирование процесса функционирования СН КА в условиях влияния ВФ. К числу таких методов относятся методы робастного проектирования по Тагути [13–15], которые в настоящее время применяются, главным образом, в области менеджмента качества предприятий. При этом показателем робастности является отношение сигнал-шум, которое выражается в децибелах.
Целью настоящей статьи является разработка методики оценивания робастности СН КА на основе параметрического планирования эксперимента.
СУЩНОСТЬ ОЦЕНИВАНИЯ РОБАСТНОСТИ СИСТЕМЫ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОСНОВЕ ПАРАМЕТРИЧЕСКОГО ПЛАНИРОВАНИЯ ЭКСПЕРИМЕНТА
Методология параметрического планирования эксперимента заключается в использовании эффективных методов достижения поставленных целей эксперимента путем планирования опытов для определения таких значений параметров исследуемой СН КА, при которых она приобретает необходимые свойства, например, свойство робастности. Центральными понятиями при параметрическом планировании эксперимента являются показатели функциональных свойств СН КА, ее технические и эксплуатационные характеристики, а также совокупность ВФ, воздействующих на СН КА в процессе ее эксплуатации.
Основным функциональным свойством СН КА является точность решения навигационной задачи, которая оценивается вектором погрешностей определения НП $\Delta \hat {Q}\left( t \right)$ в соответствующий момент времени t:
где $\hat {Q}\left( t \right)$ – оценка вектора НП, которая представляет собой результат решения навигационной задачи, полученный с помощью СН КА; $Q\left( t \right)$ – истинный вектор НП.Компонентами вектора НП, наряду с координатами и составляющими скорости КА, могут быть параметры ориентации КА, а также изменяющиеся в процессе полета конструктивные характеристики и параметры моделей погрешностей таких средств навигационных измерений, как гироскопов, акселерометров, радиотехнических и оптико-электронных приборов.
При разработке методики приняты следующие допущения.
Во-первых, ограничимся основными НП, определяемыми в результате решения навигационной задачи и характеризующими положение и скорость движения центра масс КА в пространстве. Вектор НП при этом допущении принимает вид
(2)
${\mathbf{Q}}\left( t \right) = {{\left[ {X\left( t \right)~Y\left( t \right)~Z\left( t \right)~\dot {X}\left( t \right)\dot {Y}\left( t \right)~\dot {Z}\left( t \right)} \right]}^{T}},$Во-вторых, полагая, что компоненты вектора (2) имеют одинаковую значимость, нормируем основные НП, т.е. вектор (2) представим в безразмерной форме:
(3)
$\begin{gathered} q\left( t \right) = {{\left[ {\frac{{X\left( t \right)}}{{R\left( {{{t}_{0}}} \right)}}~\frac{{Y\left( t \right)}}{{R\left( {{{t}_{0}}} \right)}}\frac{{Z\left( t \right)}}{{R\left( {{{t}_{0}}} \right)}}~\frac{{\dot {X}\left( t \right)}}{{V\left( {{{t}_{0}}} \right)}}~\frac{{\dot {Y}\left( t \right)}}{{V\left( {{{t}_{0}}} \right)}}\frac{{\dot {Z}\left( t \right)}}{{V\left( {{{t}_{0}}} \right)}}} \right]}^{T}} = \\ = {{\left[ {x\left( t \right)~y\left( t \right)~z\left( t \right)~\dot {x}\left( t \right)\dot {y}\left( t \right)~\dot {z}\left( t \right)} \right]}^{T}}, \\ \end{gathered} $С учетом соотношения (3) вектор погрешностей НП (1) можно представить следующим образом
где $\Delta \hat {q}\left( t \right)$ – безразмерный вектор погрешностей НП, определяемых СН КА; $\hat {q}\left( t \right)$ – нормированная оценка вектора НП, полученная с помощью СН КА.Ведем интегральный коэффициент погрешностей НП, который равен среднеквадратическому значению составляющих вектора (4), т.е.
(5)
${{\Delta }_{{{\Sigma }}}}\left( t \right) = \frac{1}{6}\sqrt {\sum\limits_{\nu = 1}^6 {{{\Delta }}\hat {q}_{\nu }^{2}\left( t \right)} } ,$Интегральный коэффициент погрешностей НП является положительной величиной, которая зависит от случайных и детерминированных факторов. В течение навигационного сеанса характеристики случайных факторов и уровни детерминированных факторов могут сохранять свои значения или изменяться по известным или неизвестным законам.
Из всей совокупности воздействующих на погрешности НП факторов выделим варьируемые в процессе эксперимента факторы, которые могут быть количественными и качественными, скалярными и векторными величинами. Варьируемые факторы в зависимости от источника их возникновения разделим на две группы. В результате получим группу исследуемых факторов и группу возмущающих факторов.
К группе исследуемых факторов (ИФ) отнесем те факторы, уровни которых могут варьироваться разработчиком СН КА с целью обеспечения ее робастности. В группу ИФ, например, могут входить: показатели качества навигационных измерителей и вычислителей, организация и режимы навигационных измерений, способы обработки результатов измерений, условия эксплуатации СН КА и другие факторы.
В группу возмущающих факторов (ВФ) на основании анализа возможности их реализации введем факторы, при возникновении которых возрастает интегральный коэффициент погрешностей НП. Для каждого ВФ установим количество и значения уровней возмущений.
Группа ВФ состоит из варьируемых факторов, обусловленных процессами старения и износа измерительной аппаратуры КА, ошибками программного обеспечения и сбоями бортового вычислителя, отказами и повреждениями составных частей СН КА, погрешностями выведения КА и другими факторами.
Наряду с варьируемыми факторами, на интегральный коэффициент погрешностей НП оказывают влияние неварьируемые факторы, которые неизбежно присутствуют в процессе эксперимента. К таким факторам относятся погрешности математических моделей навигационных измерений и поля сил, действующих на КА при его орбитальном движении, погрешности, обусловленные необходимостью линеаризации функций навигационного алгоритма, допущения, принятые при статистической обработке результатов измерений, и другие факторы.
План эксперимента представляет собой последовательность опытов. В каждом опыте реализуется определенная комбинация уровней ИФ из выбранного диапазона и определяется робастность СН КА. Значение показателя робастности оценивается в опыте под воздействием всех возможных сочетаний ВФ. Этот показатель соответствует анализируемой комбинации уровней ИФ и является количественной характеристикой нечувствительности СН КА к ВФ, которые принадлежат выбранной области варьирования.
Для каждого опыта составляется план, который называется планом формирования возмущений. Параметрами этого плана являются реализации, содержащие комбинации уровней ВФ.
Показатель робастности $\eta (t)$ при параметрическом планировании эксперимента определяется в каждом i-ом опыте. Формула для его расчета имеет вид
(6)
${{{{\eta }}}_{i}}\left( t \right) = 10\,{\text{lg}}\frac{{{{{{{\bar {\Delta }}}}}_{{{{\Sigma }}i}}}\left( t \right)}}{{S\left[ {{{\Delta }_{{{{\Sigma }}i}}}\left( t \right)} \right]}},\,\,\,\,i = \overline {1,~n} ~,$Основная задача параметрического планирования эксперимента заключается в выявлении такого опыта (или такой совокупности уровней ИФ), при котором показатель робастности ${{{{\eta }}}_{i}}$ принимает наибольшее значение. В этом случае СН КА, разработанная с учетом этой совокупности уровней ИФ, менее чувствительна к ВФ и обладает свойством робастности.
ЭТАПЫ ОЦЕНИВАНИЯ РОБАСТНОСТИ СИСТЕМЫ НАВИГАЦИИ КА
Оценивание робастности СН КА на основе параметрического планирования эксперимента содержит четыре этапа.
На первом этапе выполняется подготовка исходных данных для проведения экспериментальных исследований. В число исходных данных входят вектор НП, а также исследуемые и возмущающие факторы. Компонентами вектора НП КА относятся шесть кеплеровых элементов его орбиты или составляющие его радиуса-вектора и вектора скорости в абсолютной геоцентрической экваториальной системе координат.
На основании анализа естественных и специально организованных источников возмущений определяются ВФ, возникновение которых снижает точность навигации КА. В перечень ВФ, участвующих в исследованиях робастности СН КА, включаются факторы, которые могут быть реализованы в эксперименте.
При обосновании перечня ИФ выявляются и учитываются такие факторы, которые, с одной стороны, способны при варьировании изменить характеристики точности навигации КА, а, с другой стороны, чувствительны к одному или нескольким ВФ.
Второй этап представляет собой планирование экспериментальных исследований. План эксперимента содержит последовательность опытов. Исходными данными опытов являются диапазоны значений ИФ, которые подразделяются на уровни.
Опыты эксперимента отличается комбинацией уровней ИФ. Опыт планируется таким образом, чтобы реализовать процесс функционирования СН КА при всех сочетаниях уровней ВФ из установленных исследователем диапазонов. Диапазоны ВФ охватывают реальные и предполагаемые условия эксплуатации СН КА, а также начальные погрешности навигации ЛА, обусловленные, например, погрешностями выведения КА ракетой-носителем.
Реализация опытов в соответствии с планом эксперимента осуществляется на третьем этапе оценивания робастности СН КА. В процессе каждого i-ого опыта экспериментального исследования решаются k навигационных задач, которые отличаются начальными погрешностями навигации и уровнями ВФ. Выходным результатом экспериментальных исследований является массив погрешностей оценок НП, содержащий шестимерные векторы $\Delta {{\hat {Q}}_{{ij}}}\left( {{{t}_{0}}} \right),$ где i – номер опыта и j – номер реализации сочетания уровней ВФ и начальных погрешностей НП.
На четвертом этапе проводится обработка и анализ результатов эксперимента. На основании массива экспериментальных данных, полученных на третьем этапе, в соответствии с выражениями (3)–(6) выполняются расчеты показателей робастности ${{{{\eta }}}_{i}}\left( t \right).$ Анализ показателей робастности направлен на выявлении такого сочетания уровней ИФ, при котором достигается наибольшее значение ${{{{\eta }}}_{i}}\left( t \right).$
ПРИМЕР ОЦЕНИВАНИЯ РОБАСТНОСТИ СИСТЕМЫ НАВИГАЦИИ КА
В качестве примера оценим робастность автономной СН, которая в течение ряда лет успешно применялась на КА дистанционного зондирования Земли. В основу функционирования этой системы положен “зенитный” метод навигации, заключающийся в измерении трех независимых между собой параметров (зенитных расстояний (β1 и β2) двух звезд с известными координатами и высоты полета (Н) КА), которые функционально связаны с искомыми параметрами навигации [2, 7]. В состав аппаратуры СН входят бортовой вычислительный комплекс, два оптико-электронных звездных датчика (ОЭЗД) и радиовертикаль-высотомер (РВВ). Расположение ОЭЗД и РВВ на корпусе КА показано на рис. 1.
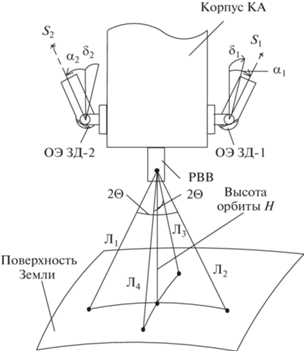
Оптико-электронные датчики обеспечивают визирование навигационных звезд ${{S}_{1}}$ и ${{S}_{2}}$ соответственно. Каждый датчик установлен в кардановом подвесе и способен производить развороты по углам орбитального восхождения ${{\alpha }}$ и склонения ${{\delta }}{\text{.}}$
Радиовертикаль-высотомер формирует две пары лучей (Л1 – Л2) и (Л3 – Л4), которые разнесены относительно друг друга по осям тангажа и крена на угол $\theta ,$ и луч Л5, направленный в центр масс Земли. При равенстве расстояний до поверхности Земли по направлениям четырех наклонных лучей биссектрисы углов, образованных лучами (Л1 – Л2) и (Л3 – Л4), совпадут с местной вертикалью.
Математические модели измеряемых параметров движения имеют вид
Измеряемые параметры ${{\tilde {\beta }}_{\mu }}$ и $\tilde {H}\,$ функционально связаны с координатами КА (X, Y, Z) и содержат случайные погрешности:
Средние квадратические отклонения результатов измерений зенитных углов и высоты полета приняты равными ${{{{\sigma }}}_{{{\beta }}}}~$ = 2 угл. мин и ${{{{\sigma }}}_{{\text{Н}}}} = 100~$ м, не зависят от действующих возмущений и остаются постоянными в течение исследований.
Под действием возмущений математические ожидания погрешностей измерений изменяются в диапазонах Δβ = (2–4) угл. мин и ΔН = (200–300) м соответственно.
Требуется оценить робастность СН при различных значениях возмущающих факторов с целью определения наименьшего их влияния на точность оцениваемых компонентов вектора $Q\left( t \right).$
Для решения этой задачи воспользуемся методикой в соответствии с ранее изложенными этапами.
На первом этапе оценивания робастности определим значения исходных данных для проведения экспериментальных исследований.
В качестве допущений предположим, что движение КА происходит в центральном гравитационном поле. Опорная орбита КА является круговой. Введем геоцентрическую прямоугольную систему координат XYZ, плоскость XY которой совпадает с плоскостью опорной орбиты КА.
Истинная орбита КА в начальный момент времени ${{t}_{0}}$ характеризуется вектором
Компоненты вектора $\Delta Q\left( {{{t}_{0}}} \right)$ определяются, главным образом, погрешностями выведения КА. Будем полагать, что компоненты вектора $\Delta Q\left( {{{t}_{0}}} \right)$ не превышают 2 км по координатам и 2 м/с по составляющим скорости.
Для решения навигационной задачи используется метод наименьших квадратов, который позволяет найти оценку НП КА ${\mathbf{\hat {Q}}}({{t}_{0}})$ в начальный момент времени ${{t}_{0}}$ по результатам навигационных измерений, проводимых в течение одного витка орбитального полета КА. При необходимости количество измерений может меняться в диапазоне от 200 до 400.
Визирная ось первого ОЭЗД находится вблизи плоскости опорной орбиты КА, а угол склонения визирной оси второго ОЭЗД способен изменяться в диапазоне от 40° до 80°.
Результатом решения навигационной задачи является оценка ${\mathbf{\hat {Q}}}({{t}_{0}})$ вектора $Q\left( {{{t}_{0}}} \right),$ т.е.
Одним из важнейших исследуемых факторов, влияющих на качество функционирования СН КА, является количество сеансов измерения, поскольку, с одной стороны, увеличение их количества приводит к повышению точности оценивания параметров навигации КА, а с другой стороны, снижает оперативность решения навигационной задачи. В этой связи важно, например, выбрать минимальное количество сеансов навигационных измерений, обеспечивающих требуемую точность. Поэтому в качестве исследуемых факторов выбраны количество сеансов навигационных измерений N, высота полета H и орбитальное склонение второй звезды δ. Уровни значений ИФ приведены в табл. 1.
Таблица 1.
Уровни значений ИФ
| Исследуемый фактор | Уровень значения фактора | |||
|---|---|---|---|---|
| 1 | 2 | 3 | ||
| 1 | N | 200 | 300 | 400 |
| 2 | H, км | 200 | 300 | – |
| 3 | δ, град | 80 | 60 | 40 |
Возмущающими факторами в рассматриваемом примере являются возмущения, при возникновении которых увеличиваются систематические погрешностей средств измерений зенитного угла и высоты полета КА, а также происходит смещение истинных компонент начального вектора НП КА по составляющим радиуса-вектора КА $\Delta r\left( {{{t}_{0}}} \right)$ и вектора скорости $\Delta {\mathbf{V}}\left( {{{t}_{0}}} \right)$ относительно опорных значений. Варьирование ВФ производится на двух уровнях. Значения уровней ВФ представлены в табл. 2.
Таблица 2.
Уровни значений ВФ
| Возмущающий фактор | Значение уровня ВФ | ||
|---|---|---|---|
| 1 | 2 | ||
| 1 | Δβ, угл. мин | 2 | 4 |
| 2 | ΔН, м | 200 | 300 |
| 3 | $\Delta r({{t}_{0}})$, км | 1 | 2 |
| $\Delta V({{t}_{0}})$, м/с | 1 | 2 | |
В соответствии со вторым этапом методики выполним планирование эксперимента. Можно показать, что для перебора всех возможный комбинаций уровней ИФ и расчета показателей робастности необходимо провести 18 опытов. План эксперимента показан в табл. 3.
Таблица 3.
План эксперимента
| Номер опыта |
Номер исследуемого фактора | Номер опыта |
Номер исследуемого фактора | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 3 | ||
| 1 | 1 | 1 | 1 | 10 | 2 | 2 | 1 |
| 2 | 1 | 1 | 2 | 11 | 2 | 2 | 2 |
| 3 | 1 | 1 | 3 | 12 | 2 | 2 | 3 |
| 4 | 1 | 2 | 1 | 13 | 3 | 1 | 1 |
| 5 | 1 | 2 | 2 | 14 | 3 | 1 | 2 |
| 6 | 1 | 2 | 3 | 15 | 3 | 1 | 3 |
| 7 | 2 | 1 | 1 | 16 | 3 | 2 | 1 |
| 8 | 2 | 1 | 2 | 17 | 3 | 2 | 2 |
| 9 | 2 | 1 | 3 | 18 | 3 | 2 | 3 |
При планировании опыта учитывается необходимость получения оценки НП при всех сочетаниях уровней ВФ, т.е. каждый опыт имеет 8 реализаций различных сочетаний уровней ВФ. План опыта изображен в табл. 4.
Таблица 4.
Плана опыта
| Номер реализации |
Номер ВФ | Номер реализации |
Номер ВФ | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 3 | ||
| 1 | 1 | 1 | 1 | 5 | 2 | 1 | 1 |
| 2 | 1 | 1 | 2 | 6 | 2 | 1 | 2 |
| 3 | 1 | 2 | 1 | 7 | 2 | 2 | 1 |
| 4 | 1 | 2 | 2 | 8 | 2 | 2 | 2 |
На третьем этапе проводится имитационное моделирование процесса функционирования СН КА. Исходные данные, варьируемые при исследовании, и порядок проведения опытов и реализаций комбинаций уровней ВФ приведены в табл. 1–4. Результаты моделирования представляют собой массив погрешностей оценок навигации КА, содержащий шестимерный вектор $\Delta \hat {Q}\left( {{{t}_{0}}} \right).$
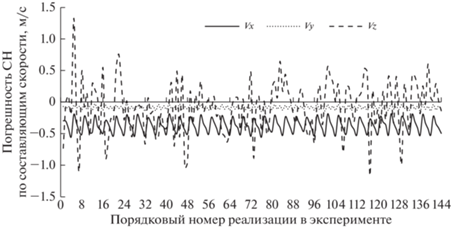
Поскольку в эксперименте проводится 18 опытов, а число реализаций в каждом опыте равно 8, общее количество реализаций в эксперименте достигает 144. На рис. 2 и 3 приведены результаты имитационного моделирования процесса функционирования СН КА, полученные при заданных исходных данных.

На четвертом этапе в соответствии с выражениями (3)–(6) оценим показатели робастности ${{{{\eta }}}_{i}}\left( {{{t}_{0}}} \right),$ где $i = \overline {1,~\,\,18} .$ Результаты выполненных расчетов изображены в виде диаграммы на рис. 4.
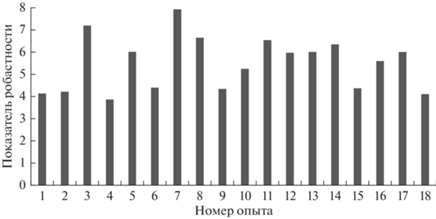
Анализ представленных на рис. 4 результатов экспериментальных исследований показывает, что наибольшее значение показателя робастности СН КА наблюдается в опыте № 7, т.е. $\mathop {\max }\limits_i {{{{\eta }}}_{i}}\left( {{{t}_{0}}} \right) = {{{{\eta }}}_{7}}\left( {{{t}_{0}}} \right) = 7.92.$ Откуда следует, что СН КА является робастной к вариациям выбранных ВФ в том случае, когда количество измерений в течении сеанса навигационных измерений составляет 300, высота полета равна 200 км, а угол склонения второй навигационной звезды выбран равным 80°.
ЗАКЛЮЧЕНИЕ
Для оценивания и изучения свойства робастности СН КА к воздействию различного рода возмущений, предложена методика, основанная на применении аппарата параметрического планирования эксперимента в рамках методологии Г. Тагути.
Предложенная методика оценивания робастности СН КА позволяет:
уточнить взаимозависимость между исследуемыми и возмущающими факторами с целью определения их влияния на функциональные характеристики СН КА;
получить количественные оценки робастности при решении задачи обоснованного выбора конкурирующих СН КА на стадии проектирования.
Приведен пример оценивания робастности автономной СН КА дистанционного зондирования Земли в соответствии с разработанной методикой.
Представленные результаты исследований могут найти применение, например, при анализе влияния ВФ на точность СН КА и обосновании выбора режима и характеристик ее функционирования на различных стадиях проектирования.
Список литературы
Молоканов Г.Ф. Точность и надежность навигации летательных аппаратов. М.: Машиностроение, 1967.
Аншаков Г.П., Голяков А.Д., Петрищев В.Ф., Фурсов В.А. Автономная навигация космических аппаратов. Самара: ЦСКБ-Прогресс, 2011.
Михайлов Н.В. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. СПб.: Политехника, 2014.
Jia Z., Balasuriya A., Challa S. Autonomous Vehicles Navigation with Visual Target Tracking: Technical Approaches // Algorithms. Sensor Algorithms. 2008. V. 1. № 2. P. 153–182.
Шмидт Дж.Т. Эксплуатация навигационных систем на основе GPS в сложных условиях окружающей среды // Гироскопия и навигация. 2019. Т. 27. № 1(104). С. 3–21.
Oshman Y. Robust Navigation Using the Global Positioning System in the Presence of Spoofing // J. Guidance Control and Dynamics. 2006. V. 29. № 1. P. 95–104.
Голяков А.Д., Ананенко В.М., Фоминов В.И. Системы навигации летательных аппаратов. СПб.: Военно-космическая академия им. А.Ф. Можайского, 2018.
Голяков А.Д., Романов В.В. Метод обеспечения длительных сроков автономного функционирования системы астронавигации космического аппарата // Навигация и гидрография. 1996. № 3. С. 56–59.
Голяков А.Д., Фоминов В.И. Аналитическая оценка точности автономной навигации космического аппарата по результатам адаптивных измерений высоты его полета // Вестник Самарского государственного аэрокосмического университета. 2015. Т. 14. № 1. С. 18–24.
Xiong H., Mai Z., Tang J. A Robust Single GPS Navigation and Positioning Algorithm Based on Strong Tracking Filtering // IEEE Sensors J. 2018. V. 18. Is. 1. P. 290–298.
Chan Y., Aung L., Thar W. et al. Robust Navigation System for a Land Vehicle // Computer Science. 2013. V. 2008. P. 238–243.
Математическая теория планирования эксперимента / Под ред. С.М. Ермакова. М.: Наука, 1983.
Logothetis N., Wynn H.P. Quality Through Design: Experimental Design, Off-line Quality Control, and Taguchi’s Contributions. UK: Oxford University Press, Oxford Science Publications, 1995.
Леон Р., Шумейкер А., Какар Р. Управление качеством. Робастное проектирование. Метод Тагути. М.: Сейфи, 2002.
Брагин Ю.В. Методология робастного проектирования по Тагути // Методы менеджмента качества. 2011. № 11. С. 31–36.
Дополнительные материалы отсутствуют.
Инструменты
Космические исследования