

Проблемы машиностроения и надежности машин, 2022, № 4, стр. 97-107
Перспективный самоперемещающийся параллельный робот “октаэдральный ледоскалыватель” для очистки вантовых мостов от наледи и снега
С. Н. Саяпин *
Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
* E-mail: S.Sayapin@rambler.ru
Поступила в редакцию 22.10.2021
После доработки 03.02.2022
Принята к публикации 11.02.2022
- EDN: JKZGZB
- DOI: 10.31857/S0235711922030105
Аннотация
Рассмотрена проблема обледенения вантовых мостов и современные пути ее решения. Показана актуальность роботизации процесса очистки вант от наледи и снега. Представлена новая концепция адаптивного самоперемещающегося параллельного робота “Октаэдральный ледоскалыватель” для очистки вант от снега и льда. Показана возможность эффективного удаления наледи с ванты на примере силовой физической кинематической модели “Октаэдрального ледоскалывателя”, независимо от пространственной ориентации ванты. Рассмотрены потенциальные возможности “Октаэдрального ледоскалывателя” применительно к очистке от наледи и снега протяженных элементов других типов инженерных объектов.
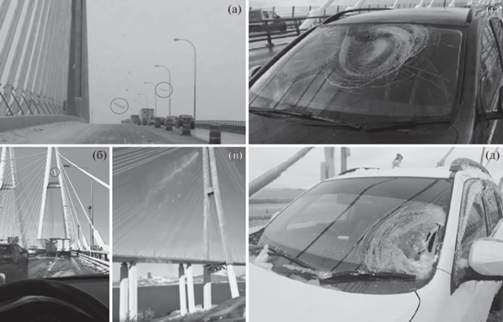
Вантовые мосты представляют собой разновидность висячих мостов и включают в себя пилоны, монтируемые к опоре и ванты в виде железных тросов. Благодаря своему ажурному силуэту, легкости несущих конструкций и ряду других достоинств, вантовые мосты хорошо соответствуют архитектурным и эксплуатационным требованиям современного мостостроения [1, 2]. При этом у вантовых мостов-гигантов высота пилона и длина ванты может достигать более 300 и 500 метров соответственно. Например, общая длина вант Русского моста во Владивостоке составляет около 55 км, при их наружном диаметре 130 мм [3]. Обледенение вантовых мостов наблюдается во многих регионах мира, особенно в северных широтах и прибрежных районах, подверженных воздействиям ледяных штормов и ледяных дождей [4]. В результате переменного характера нагрузки на ванты, а также потепления, происходит самопроизвольное обрушение и падение с большой высоты на проезжую часть моста скопившегося снега и ледяного покрытия (рис. 1а–в). Известны несчастные случаи и повреждения машин (рис. г, д), вызванные падением скопившегося снега и льда с вант.
Рис. 1.
Примеры негативных последствий обледенения вантовых мостов: (а) – падение кусков льда на проезжую часть моста Ветеранов (США) [4]; (б) – падение куска льда на проезжую часть Большого Обуховского моста в г. Санкт-Петербург (https://www.youtube.com/watch?v=LXghZBDU4yk); (в) – самообрушение льда с вант Русского моста в г. Владивосток (https://yandex.ru/efir?stream_id=4e493f51f4f1bd5c89880fd79e994351); (г) – повреждение машины упавшим куском льда на мосту Квинсферри-кроссинг (Шотландия, https://www.bbc.com/news/uk-scotland-51473419); (д) – повреждение машины упавшим куском льда на Русском мосту в г. Владивосток (https://www.dv.kp.ru/daily/21712093.5/4329464/).
При этом подобное обрушение способно вызвать галопирующие колебания ванты подобно “пляске провода” линии электропередачи [5], которые, в свою очередь, провоцируют дальнейшее обрушение снежного или ледяного покрытия. Также галопирующие колебания вант могут происходить в результате изменения их аэродинамического сопротивления, вызванного обледенением или налипанием снега [6].
К настоящему времени в мире опробовано множество методов борьбы с обледенением вант, которые можно объединить в следующие основные группы [2, 5, 7, 8].
Механические методы основаны на механическом разрушении льда. При механической очистке вант ото льда или снега лед или снег удаляются вручную или автоматически. На период очистки вантовый мост закрывают для движения. Ручное удаление проводится путем физического разрушения льда или налипшего снега. Во время ручного удаления с вант невысоких вантовых мостов рабочие поднимаются к месту очистки вант в люльках минивысотных (до 18 м) и средневысотных (до 30 м) автовышек. Для очистки от снега и наледи высотных вантовых мостов и мостов-гигантов [2, 3] привлекаются команды промышленных альпинистов как, например, в случае обледенения Русского моста во Владивостоке в конце 2020 года (рис. 2а–в). При этом технология очистки вант подобных мостов не предусматривает подъема альпиниста обратно на пилон и его движение направлено только вниз по ванте (рис. 2а, б), независимо от усталости и других причин. Работы по очистке Русского моста велись промышленными альпинистами вручную в течение девяти часов ежедневно на высоте около 300 метров над уровнем моря при морозе с ветром. Страховка альпинистов от соскальзывания по ванте вниз велась с пилона при помощи веревок (рис. 2а). Толщина наледи ванты достигала 15–20 см (рис. 2в), что затрудняло процесс ее удаления ударными воздействиями. В результате механической очистки Русского моста вручную было сбито более 1000 т льда.
Рис. 2.
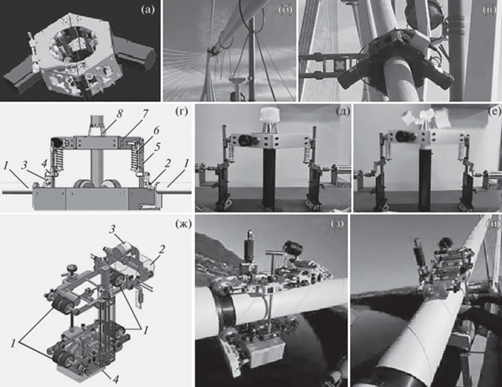
Ручная (а)–(в) и механизированная (г)–(и) очистка вант промышленными альпинистами: (а), (б) – общий вид на очистку вант Русского моста со страховкой с пилона; (в) – общий вид на обледенелую ванту Русского моста (https://www.fontanka.ru/2020/11/26/69579253/); (г) – общий вид вантовой снегоуборочной каретки; (д) – цепная воротниковая система в действии; (е) – цепной воротник в конце падения; (ж) – общий вид цепного воротника; (з) – подъем отработанных цепных воротников на верхнюю площадку пилона для повторного использования; (и) – установка цепных воротников на подвеске в верхней части ванты.

Основными ограничениями ручной очистки вант на высоте являются темное время суток и неблагоприятные погодные условия.
Тепловые методы, основаны на таянии льда за счет наружного или внутреннего подвода тепла к оболочкам вант с применением электронагрева или горячего воздушного потока, а также пара. В работах [5, 8] отмечено, что для применения механических методов ударного и компрессионного разрушения гололеда требуется затратить энергии соответственно в 100 тыс. и в 50 тыс. раз меньше, чем при использовании тепловых методов удаления сформировавшихся гололедных отложений. При этом в некоторых случаях нагрев обледенелых оболочек вант недопустим из-за находящегося внутри них легкоплавкого горючего материала, например, парафина (http://www.freyssinet.ru/freyssinet/freyssinet-russia_ru.nsf/sb/products-and-techniques.stay-cables). В настоящее время в мире нет ни одного успешного примера использования систем нагрева для удаления с поверхности вант снега и льда. Это, прежде всего, связано с огромными площадями обледенелых поверхностей вант, которые для их нагрева с учетом низкой температуры, ветра, осадков и потерь тепла потребуют огромных энергозатрат. При локальном нагреве поверхности ванты талая вода будет стекать на более холодный участок, и замерзать повторно.
Пассивные методы включают нанесение на оболочку вант антиадгезионных покрытий. Однако в работе [7] отмечено, что в настоящее время отсутствуют какие-либо пассивные противообледенительные методы, которые бы полностью препятствовали обледенению вант. Поэтому пассивные методы оказываются неэффективными в случаях воздействия на вантовые мосты ледяных штормов и ледяных дождей.
По мнению ряда инженеров и исследователей традиционно наиболее эффективным методом борьбы с обледенением вант, особенно высотных вантовых мостов, остаются механические методы с ручным удалением льда командами промышленных альпинистов [4, 7, 8]. При этом процесс очистки вант с учетом размеров моста и количества вант, может длиться от нескольких недель до месяца и более. Поэтому, с учетом экстремальных условий работы промышленных альпинистов и длительности процесса очистки, проблема механизации и роботизации ручной механической очистки вант от снега и льда является современной и актуальной, но опубликованных работ, посвященных решению этой проблемы, крайне мало. Ниже представлен сравнительный анализ известных примеров механизации и роботизации процесса ручной механической очистки вант от снега и льда.
Механизированные методы. Для механизации процесса ручной очистки вант от наледи по заданию Министерства транспорта и инфраструктуры Британской Колумбии (Ministry of Transportation and Infrastructure British Columbia), были разработаны вантовая снегоуборочная каретка (ВСК) (рис. 2г) и система цепных воротников (https://www.tranbc.ca/2019/03/05/winter-safety-on-alex-fraser-and-port-mann-bridges-explained/) (рис. 2д–и). Тестовые испытания ВСК с жесткими щетками и скребками были проведены на заснеженных вантах моста Алекса Фрейзера (Alex Fraser Bridge, Канада). ВСК перемещали вверх-вниз по ванте с помощью тросовой лебедки. Результаты испытаний показали недостаточную ее эффективность и надежность, особенно во время снегопада. Поэтому была принята система с цепными воротниками, прошедшая успешное тестирование при толщине снега 5 см и внедренная для механизированной очистки вант моста Алекса Фрейзера и моста Порт Манн (Port Mann Bridge, Канада). На рис. 2д–и представлена эксплуатация названной системы на мосту Порт Манн. Система включает в себя 30 цепных воротников, стопор и якорь, установленных на каждой из 288 вант. Цепной воротник весом 12–22 кг (в зависимости от угла наклона ванты) под действием силы тяжести скользит по ванте от ее верхней точки до нижней, соскребая с поверхности ванты снежное или ледяное покрытия (рис. 2д). В нижней части ванты цепной воротник останавливается демпферным устройством (рис. 2е). После спуска вниз всех цепных воротников, их разъединяют, перемещают к пилону и с помощью шлюпбалки поднимают на верхнюю площадку пилона (рис. 2з) и подготавливают для установки на подвеску (рис. 2ж). Далее промышленные альпинисты устанавливают цепные воротники на дистанционно управляемую подвеску (рис. 2и). После установки всех цепных воротников, подвеска готова к их повторному (при необходимости) спуску вниз. Обслуживает систему очистки 12–20 человек. Система очистки вант для моста Алекса Фрейзера идентична описанной системе и отличается количеством вант (192) и обслуживающего персонала (12–16), а также весом цепных воротников (7–9 кг). К недостаткам описанной системы следует отнести следующие: 1) неэффективность при больших толщинах (более 5 см) и протяженности ледяного покрытия (рис. 2в); 2) ограничение по ветру (до 20 км/час или 5.6 м/с) в процессе установки цепных воротников на подвеске в верхней части ванты (рис. 2, 3); 3) проведение опасных высотных работ в неудобном положении и на весу при установке цепных воротников; 4) невозможность преодоления каких-либо препятствий на ванте в виде элементов конструкции ванты или повреждения ее оболочки; 5) повреждение покрытия оболочки кабеля.
Рис. 3.
Варианты вантовых роботов: компоновка (а), перемещение (б) и общий вид снегоуборочного робота SRR (в); общая схема ударного ледоскалывающего механизма (г), вантового робота и его физическая модель перед разрушением льда (д) и после (е); общий вид вантового инспекционного снегоуборочного робота (ж) и его перемещение вдоль ванты (з), (и).
Эти недостатки могут быть частично или полностью преодолены за счет применения мобильных роботов, способных к перемещениям вверх-вниз по ванте и удалению с их поверхности снега и льда.
Роботизированные методы. В настоящее время известны образцы мобильных роботов, созданных в ряде стран для очистки проводов ЛЭП от снега и льда [5]. Однако практически ни один из них не способен перемещаться по направляющим, расположенным под крутым углом к горизонту. Также из рассмотрения были исключены мобильные роботы для мониторинга и диагностики состояния вант, т.к. они не приспособлены для удаления с вант снега и льда. Ниже представлен сравнительный анализ известных решений мобильных роботов, предназначенных для очистки вант от снега и льда.
Вантовый снегоуборочный робот. Для очистки вант Инчхонского моста (Incheon Bridge, Южная Корея) в Incheon Bridge Corporation (Южная Корея) был разработан и протестирован на заснеженных вантах Инчхонского моста снегоуборочный робот SRR (Snow-Removing Robot) скребкового типа [9, 10]. На рис. 3 показана компоновка SRR (рис. 3а), перемещение SRR с питающим и управляющим кабелями вдоль ванты (рис. 3б) и общий вид SRR (рис. 3в). В случае отключения питания SRR происходит его автоматическое скольжение вниз вдоль ванты до соударения с демпфером, расположенным в нижней части ванты.
Основные характеристики SRR: вес 25 кг, габаритные размеры 300 × 300 × 300 см, напряжении питания 220 В, кабельное питание и управление, максимальный угол подъема 50°, диаметр обслуживаемых вант 108–153 мм при длине 170–420 м. Движитель SRR включает полиуретановые ролики и гусеничные ленты (рис. 3а). Блоки внутри SRR съемные и меняются в зависимости от диаметра ванты.
К недостаткам SRR следует отнести следующие: 1) неуправляемый спуск при отключенном питании с угрозой соударения SRR с датчиками и другими выступающими элементами ванты; 2) из-за ограничения по углу подъема (50°), SRR можно использовать лишь для очистки периферийных вант моста; 3) из-за индивидуальной привязки сменных блоков SRR к диаметру очищаемой ванты, ее диаметр должен быть постоянным по всей длине; 4) SRR не способен преодолевать выступающие препятствия, а также участки ванты с поврежденной оболочкой; 5) ограничения по толщине снега и льда из-за опасности пробуксовки движителей и перегрева электродвигателей.
Ударный ледоскалывающий механизм (УЛМ) вантового робота. В работе [11] представлен УЛМ вантового робота (рис. 3г–е). Каждый из двух двигателей 1 УЛМ приводит в движение кривошипно-шатунный механизм. При этом вращательное движение каждого из кривошипов 2 преобразуется через шатун 3 в возвратно-поступательное движение ползуна 4 вдоль направляющей стойки 5. Ползуны 4 через пружины сжатия 6 передают возвратно-поступательное движение каретке 7, перемещаемой вдоль направляющих стоек 5. При этом посредине каретки 7 установлено лезвие 8 в виде двух половинок усеченного конуса с острыми зубьями на основании меньшего диаметра, которые и оказывают ударные воздействия на торцевую поверхность ледяного покрытия ванты. Внутренний диаметр острых зубьев лезвия 8 соответствует наружному диаметру ванты с соответствующим зазором. Устройство можно установить на вантовом мобильном роботе с роликовым или другим типом движителя. Недостатки УЛМ вантового робота аналогичны недостаткам предыдущей конструкции робота. Также во избежание перекоса и заклинивания каретки 7 требуется прецизионная синхронизация двигателей 1. Кроме того, геометрические параметры лезвия 8 “привязаны” к ванте определенного диаметра, что сужает область применения робота, а острые зубья лезвия 8 способны повредить защитное покрытие ванты.
Вантовый инспекционный снегоуборочный робот. В работе [12] представлен вантовый инспекционный робот с прижимными роликами 1 колесного движителя и вращающейся жесткой щеткой 2 для удаления снега с поверхности ванты (рис. 3ж–и). Робот также снабжен видеокамерой высокого разрешения 3 и трехосным блоком акселерометров. Управление роботом беспроводное через контроллер 4, электропитание от 2-х литиевых аккумуляторных батарей. Устройство управления диаметром обхвата ванты прижимными роликами 1 обеспечивает обслуживание вант с различными диаметрами. Недостатки представленного вантового инспекционного снегоуборочного робота с колесным движителем аналогичны недостаткам предыдущего вантового снегоуборочного робота, за исключением наличия у него автономного электропитания и беспроводного управления.
Для устранения недостатков в ИМАШ РАН разработан новый подход к роботизированной очистке вант от снега и льда с использованием самоперемещающегося параллельного робота “Октаэдральный ледоскалыватель” (СПРОЛ). Следует отметить, что к настоящему времени в ИМАШ РАН накоплен богатый и многолетний научный и инженерный опыт в области анализа и синтеза механизмов параллельной структуры различного функционального назначения, многие из которых внедрены и использованы в экономике Российской Федерации [13, 14].
Самоперемещающийся параллельный робот “Октаэдральный ледоскалыватель” для очистки вант мостов от наледи и снега. СПРОЛ представляет собой пространственный параллельный робот с 12 DOF, способный самоперемещаться вдоль ванты и осуществлять ее очистку от наледи и снега. На рис. 4 представлены кинематическая (а) и структурная (б) схемы СПРОЛ и циклограмма очистки ванты от наледи и снега (рис. 4в–д) с его помощью.
Рис. 4.
Кинематическая (а) и структурная (б) схемы СПРОЛ; (в)–(д) – этапы рабочего цикла СПРОЛ при очистке ванты от наледи и снега. 6' – количество элементов.
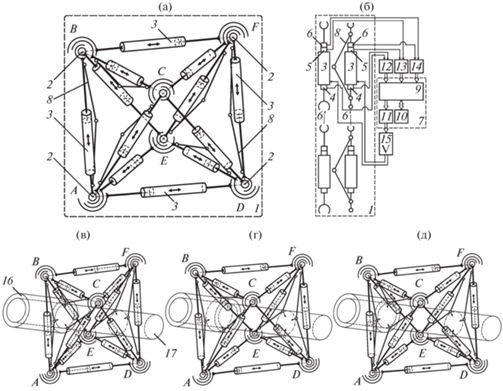
СПРОЛ выполнен на основе разработанного ранее в ИМАШ РАН адаптивного мобильного пространственного параллельного робота-манипулятора для обслуживания ЛЭП [5]. При этом для упрощения конструкции из прототипа СПРОЛ были удалены отдельные элементы не оказывающих влияние на выполнение функциональных требований по удалению с вант наледи и снега. Исполнительная (активная) часть СПРОЛ выполнена в виде пространственного самоперемещающегося параллельного механизма (ПСПМ) 1, который в исходном положении представляет собой октаэдр ABCDEF. В вершинах 2 ПСПМ 1 шарнирно соединены концы смежных стержней-ребер октаэдра ABCDEF, каждый из которых снабжен линейным приводом 3, а также осевым датчиком силы 4, осевым датчиком относительного перемещения 5 и осевым датчиком относительной скорости 6. Управление линейным приводом 3 осуществляется от системы управления 7. Две из восьми противоположных граней октаэдра ABCDEF делятся на фронтальную грань ABC (переднюю по ходу перемещения ПСПМ) и тыльную DEF – заднюю по ходу перемещения. Между фронтальной и тыльной гранями расположены боковые грани ACD, ADE, ABE, FBC, FBE, FCD. При этом концы линейного привода 3 фронтальной и тыльной граней шарнирно связаны с двухзвенными ударно-обжимными устройствами (ДУОУ) 8. Система управления 7 состоит из нейрокомпьютера 9, программно-алгоритмического обеспечения 10 и цифроаналогового преобразователя (ЦАП) 11. Аналого-цифровые преобразователи (АЦП) осевых датчиков силы 4 (АЦП 12), осевых датчиков относительного перемещения 5 (АЦП 13) и осевых датчиков относительной скорости 6 (АЦП 14) через соответствующие выходы подключены к входам нейрокомпьютера 9. Выходы нейрокомпьютера 9, система управления 7 через ЦАП 11 и усилители мощности 15 подключены к соответствующим линейным приводам 3. С помощью линейных приводов 3, образующих фронтальную и тыльную грани, ДУОУ 8 оказывают механическое воздействие на ледяное или снежное покрытие 16 при роботизированной очистке ванты 17 моста. При этом питание системы управления 7 и линейных приводов 3 можно выполнить как автономным, например, в виде подвесного оборудования (аккумуляторы, малогабаритные бензиновые генераторы, а также малогабаритные бензиновые поршневые компрессоры) [5], или дистанционным. Дополнительно на несущей конструкции СПРОЛ можно установить систему видеомониторинга, анемометр, датчики температуры, а также манипулятор. При этом для обеспечения надежности функционирования СПРОЛ в процессе его синтеза необходимо корректно определять и учитывать зоны возможных сингулярностей (зоны особых положений) рассматриваемого пространственного l‑координатного механизма параллельной структуры [15].
Рассмотрим этапы рабочего цикла очистки ванты с помощью СПРОЛ.
Этап 1. Установка СПРОЛ на ванте в начальном положении (рис. 4в). Предварительно в месте установки с ванты 17 удаляют ледяное или снежное покрытие 16. Далее осуществляют отсоединение от вершин 2 ПСПМ 1 трех смежных стержней (по одному от фронтальной, боковой и тыльной граней), например AB, BE и EF (рис. 4в), установку ПСПМ 1 на ванту 17. При этом фронтальная грань располагается по направлению движения ПСПМ 1 непосредственно перед неочищенным от ледяного или снежного покрытия 16 участком ванты 17, а длины ребер, соединяющих вершины 2 фронтальной ABC и тыльной DEF граней, имеют минимальные значения. После этого удаленные смежные стержни устанавливают на прежние места и вводят в систему управления 7 данные о ванте 17 (диаметр ванты или ее защитной оболочки, материал и толщина стенки защитной оболочки, а также максимальный диаметр описанной окружности ледяного или снежного покрытия 16 ванты 17). Затем от системы управления 7 подается команда на включение линейных приводов 3 тыльной грани DEF. При этом длины стержней AB, BC и CA уменьшаются, а центральные шарнирные узлы ДУОУ 8 радиально перемещаются к поверхности ванты 17 до момента контакта с ней и фиксации с требуемым усилием, которое определяется по показаниям осевых датчиков силы 4 и передается в систему управления 7. Далее аналогичным образом уменьшаются длины стержней фронтальной грани ABC и, после обеспечения гарантированного зазора между центральными шарнирными узлами ДУОУ 8 и поверхностью ванты 17, линейные привода 3 останавливаются по командам от системы управления 7, которые формируются по показаниям осевых датчиков относительного перемещения 5 стержней с учетом диаметра ванты, введенного в систему управления 7 ранее. После фиксации тыльной грани DEF к ванте 17, от системы управления 7 поступает команда на остановку линейных приводов 3 и в систему управления 7 вводятся координаты вершин 2 зафиксированной тыльной грани DEF относительно базовой (инерциальной) системы координат и СПРОЛ готов к работе.
Этап 2. Перевод СПРОЛ в промежуточное положение и подготовка к удалению вантовой наледи с заданным шагом (рис. 4г). На данном этапе по командам от системы управления 7 включают линейные привода 3 фронтальной грани ABC и, с учетом введенного в систему управления 7 ранее максимального диаметра описанной окружности вантовой наледи, увеличивают длины ребер грани ABC до момента установления требуемого гарантированного зазора между диаметром окружности, описанной центральными шарнирными узлами ДУОУ 8, и максимальным диаметром вантовой наледи. После этого линейные приводы 3 фронтальной грани ABC останавливаются по командам от системы управления 7, которые формируются по показаниям осевых датчиков относительного перемещения 5 стержней фронтальной грани ABC. Затем включают линейные приводы 3 ребер, соединяющих вершины 2 фронтальной ABC и тыльной DEF граней и увеличивают их длины. После перемещения фронтальной грани ABC относительно тыльной DEF на заданный шаг, от системы управления 7 поступают команды на остановку соответствующих линейных приводов 3, формируемые по показаниям осевых датчиков относительного перемещения 5 соответствующих ребер-стержней. СПРОЛ готов к началу процесса механического обрушения наледи 16 с ванты 17.
Этап 3. Конечное положение СПРОЛ после механического обрушения наледи с ванты (рис. 4д). Для организации данного процесса линейные приводы 3 фронтальной грани ABC включаются на реверс. В результате центральные шарнирные узлы ДУОУ 8 осуществляют радиальные перемещения и оказывают механическое давление на вантовую наледь 16, разрушая последнюю. При этом в зависимости от физических свойств наледи процесс воздействия может носить плавный, ударный или виброударный характер. При необходимости согласованным изменением длин боковых стержней фронтальную грань ABC можно повернуть в обоих направлениях относительно тыльной грани DEF. В случае очистки ванты 17 от снежного покрытия 16 на центральные шарнирные узлы ДУОУ 8 можно установить серповидные скребки (на рис. 4 не показаны), дуговые вырезы которых соответствуют поперечному профилю наружной поверхности ванты 17. При этом снежное покрытие удаляется осевым поступательным или возвратно-поступательным перемещением (в пределах выбранного шага) серповидных скребков фронтальной грани ABC, рабочая поверхность которых сопряжена с поверхностью ванты.
После окончания очистки ванты от наледи и снега на заданном участке, СПРОЛ вновь переводят в начальное положение подобно этапу 1 с одновременным его перемещение вдоль ванты на величину заданного шага (рис. 4в). Это достигается уменьшением длин ребер фронтальной грани ABC и ее фиксацией на ванте. Далее увеличивают длины ребер тыльной грани DEF до обеспечения гарантированного зазора между центральными шарнирными узлами ДУОУ 8 грани DEF и поверхностью ванты 17. Затем уменьшают длины боковых стержней до минимальных значений. В результате СПРОЛ вновь оказывается в исходном положении (рис. 4в), но уже на новом месте и процесс очистки ванты от ледяного или снежного покрытия повторяется.
После окончания очистки ванты по всей ее длине, осуществляется возвращение СПРОЛ в исходную нижнюю точку. При этом процесс спуска по ванте может быть аналогичным процессу подъема или организован путем скольжения СПРОЛ по ванте под действием силы тяжести с подтормаживанием, обеспеченным силами трения скольжения между центральными шарнирными узлами ДУОУ 8 и поверхностью ванты 17.
Для подтверждения правильности выбранных решений была изготовлена силовая физическая модель ПСПМ, включая имитатор ванты с обледенелым участком (рис. 5), на которой было успешно продемонстрировано выполнение этапов 1, 2 и 3 рабочего цикла очистки ванты от наледи (рис. 4в–д).
Рис. 5.
Рабочий цикл силовой физической модели ПСПМ на имитаторе ванты с участком наледи (номера позиций соответствуют позициям на рис. 4): (а) – исходное положение (этап 1); (б) – подготовка к удалению вантовой наледи с заданным шагом (этап 2); (в) – механическое обрушение наледи с имитатора ванты (этап 3).

Дальнейшие работы в ИМАШ РАН будут направлены на разработку и исследование полномасштабного экспериментального образца СПРОЛ и проведения его модельных и натурных испытаний.
Заключение. В результате проведенных исследований следует отметить следующее: 1. Роботизация процесса механической очистки вант от наледи и снега является актуальной проблемой. 2. Приведен аналитический обзор известных технических решений, направленных на роботизацию данного процесса. 3. Представлена разработанная в ИМАШ РАН концепция СПРОЛ, лишенная отмеченных в обзоре недостатков, а также ее силовая физическая модель, показавшая правильность выбранных технических решений. 4. Отмечена возможность реализации СПРОЛ на основе устройств, применяемых в современной робототехнике. 5. Показано, что СПРОЛ является универсальной робототехнической системой и может эффективно использоваться для роботизированной механической очистки от наледи и снега не только вантовых мостов, но и других объектов, например, проводов и одиночных опор ЛЭП [5], а также подвесных канатных дорог и такелажа крупногабаритных судов.
Список литературы
Разживина А.Э., Соболева А.Н. Мостовые сооружения вантового типа // Alfabuild. 2018. № 3 (5). С. 76.
Gimsing N.J., Georgakis C.T. Cable supported bridges: Concept and design. 3rd ed. John Wiley & Sons, Ltd. Chichester, United Kingdom, 2012. 599 p.
Колюшев И.Е. Вантовые мосты-гиганты: сравнительный анализ инженерных решений // Дороги. Инновации в строительстве. 2011. № 10. С. 46.
Clinton M., Abdelaal A., Nims D., Ng T.-M., Hunt V., Helmicki A., Ryerson C., Jones K. Icing Management on the Veterans’ Glass City Skyway Stay Cables // Transportation Research Record: Journal of the Transportation Research Board. 2015. V. 2482 (1). P. 74. https://doi.org/10.3141/2482-10
Саяпин С.Н. Анализ и перспективы развития роботизированной механической очистки проводов ЛЭП от снега и льда // Электрические станции. 2021. № 2. С. 21. https://doi.org/10.34831/EP.2021.1075.2.004
Li S., Wu T., Huang T., and Chen Z. Aerodynamic stability of iced stay cables on cable-stayed bridge // Wind and Structures. 2016. V. 23 (3). P. 253. https://doi.org/10.12989/was.2016.23.3.253
Kleissl K., Georgakis C.T. Bridge ice accretion and de- and anti-icing systems: A review // Proceedings of the 7th International Cable Supported Bridge Operators’ Conference (ICSBOC’2010), Zhenjiang, China, 18–20 May, 2010. P. 161.
Laforte J.L., Allaire M.A., Laflamme J. State-of-the-art on power line de-icing // Atmospheric Research. 1998. V. 46 (1–2). P. 143.
Jung H.J., Yang T.H., Jang B.S. Field application of a robotic system on cable stays of Incheon Bridge for snow removal // Proceedings of 28th International Symposium on Automation and Robotics n Construction (ISARC2011), Seoul, South Korea, June 29th–July 2nnd, 2011. P. 1415.
Yun H.B., Kim S.H., Wu L., Lee J.J. Development of inspection robots for bridge cables // The Scientific World Journal. 2013. V. 2013. 967508. 17 p. https://doi.org/10.1155/2013/967508
Hong Z., He K., Xu Y., Fang H., Zuo Q., and Li Z. Design and Research on Impact Deicing Mechanism of Cable Climbing Robot // In: 2021 International Conference on Computer, Control and Robotics (ICCCR), Shanghai, China, 8–10 Jan., 2021. IEEE, 2021. P. 70. https://doi.org/10.1109/ICCCR49711.2021.9349271
Kim J., Seo D.W., Jung K.S., Park K.T. Development of inspection robot for removing snow on stays of cable-stayed bridge // Journal of the Korea Academia-Industrial cooperation Society. 2020. V. 21 (3). P. 246. https://doi.org/10.5762/KAIS.2020.21.3.246
Ganiev R.F. On the current state and the future prospects of the Institute of Machine Science, Russian Academy of Sciences, and problems of the mechanics of machines and breakthrough technologies // J. Mach. Manuf. Reliab. 2014. V. 43 (3). P. 188. https://doi.org/10.3103/S1052618814030029
Glazunov V.A., Chunichin A.Y. Development of mechanisms of parallel structure // Journal of Machinery Manufacture and Reliability. 2020. V. 43 (3). P. 211. https://doi.org/10.3103/S1052618814030030
Gebel’ E.S., Gavrilina L.V., Glazunov V.A., Demidov S.M., Shvets P.A. Construction of a Singularity Zone for a Type of Mechanisms with Parallel Structure // Journal of Machinery Manufacture and Reliability. 2020. V. 49 (11). P. 907. https://doi.org/10.3103/S1052618820110047
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин