

Проблемы машиностроения и надежности машин, 2022, № 6, стр. 10-20
Об углах между подпространствами силовых винтов в механизмах параллельной структуры
П. А. Ларюшкин *
Московский государственный технический университет им. Н.Э. Баумана
Москва, Россия
* E-mail: pav.and.lar@gmail.com
Поступила в редакцию 25.05.2022
После доработки 18.07.2022
Принята к публикации 19.08.2022
- EDN: MOQVXU
- DOI: 10.31857/S0235711922060062
Аннотация
В статье рассматривается возможность теоретического анализа близости к особым положениям механизмов параллельной структуры в случае, когда группа всех силовых винтов механизма включает линейно зависимые винты. Предлагается рассматривать отдельные группы силовых винтов в качестве подпространств шестимерного линейного пространства. В этом случае критерием близости к особому положению может выступать значение угла между указанными подпространствами. Отмечена связь данного угла со значением обобщенной реакции, сопоставляемой соответствующему силовому винту. На примере 4-RRR механизма, показано, что данная мера является непрерывной, в отличие от ранга матрицы силовых винтов, который изменяется только непосредственно в особом положении.
Механизмы параллельной структуры находят все большее распространение в различных областях техники и технологии. В частности, технологические машины, механическая часть которых основана на механизмах данного класса, включают [1]: манипуляционные устройства (в том числе для работы в агрессивных средах), устройства ориентации, технологическое оборудование механообрабатывающего производства, медицинское оборудование, авиатренажеры и др.
Одним из главных недостатков механизмов параллельной структуры является существование так называемых особых (сингулярных) положений внутри их рабочих зон. При попадании выходного звена в точку, соответствующую такому положению, происходит мгновенное изменение подвижности механизма: возможна потеря степени свободы выходным звеном или приобретение им неконтролируемой подвижности [2]. Поэтому исследования в данной области, в частности построение сингулярных зон механизма, синтез механизмов (в том числе l-координатных), не имеющих особых положений и т.д. являются весьма актуальным [3–6]. К настоящему времени учеными и исследователями разработаны и опробованы различные подходы к классификации и анализу особых положений [7–11], каждый из которых обладает своими достоинствами и недостатками.
Помимо собственно особых положений, отдельную проблему представляет близость к ним. Так, вблизи особых положений возможно увеличение нагрузки на элементы и приводы механизма, потеря жесткости и точности позиционирования, возникновение нежелательных вибраций. Все это побудило исследователей к разработке различного рода критериев (мер) близости к особым положениям [12–18]. Как и в случае с математическими критериями собственно особых положений, применимость данных мер во многом зависит от задач анализа механизма. Часть критериев близости к особым положениям не обладает ясным физическим смыслом и больше подходит для фундаментального анализа разрабатываемых кинематических схем механизмов. В то же время другую часть, напрямую связанную с измеримыми характеристиками манипулятора, можно использовать при непосредственном проектировании устройств на базе рассматриваемых схем [19].
В настоящей статье в качестве одного из возможных критериев близости к особым положениям предлагается рассматривать значение угла между подпространствами шестимерного линейного (векторного) пространства, порожденного силовыми винтами механизма. Этот критерий можно применить при анализе близости к особым положениям методами, основанными на винтовом исчислении.
Силовые винты механизмов. Приведем краткие сведения из винтового исчисления, касающиеся уравновешивания внешней нагрузки на механизм [20]. Пусть в каком-либо пространственном механизме параллельной структуры на его выходное звено действует внешняя нагрузка, задаваемая силовым винтом p = (f, m), где f – вектор внешней силы, m – вектор внешнего момента. Такая нагрузка будет уравновешиваться силовыми винтами, действующими со стороны кинематических цепей механизма
где wi – единичный силовой винт, действующий со стороны цепи; ri – соответствующая ему обобщенная реакция; N – количество силовых винтов цепей. При этом силовые винты wi могут характеризовать как постоянные связи, накладываемые цепями на выходное звено (винты связей), так и связи, возникающие только при остановке приводов механизма (приводные винты). Тип силового винта (связи или приводной) в данном случае значения не имеет.Любые винты, как силовые, так и кинематические, представляют собой геометрический образ, включающий два трехмерных вектора [20]. На практике винты представляют в виде вектора с шестью Плюккеровыми координатами, причем первые три называются векторной частью винта, а вторые – моментной. Физически, векторная и моментная часть имеют разную природу: у кинематического винта это угловая и линейная скорости, а у силового – сила и момент силы соответственно. Рассмотрение винта в качестве шестимерного вектора, а не взаимосвязанной пары двух трехмерных векторов приводит к потере упомянутого физического смысла его компонентов. Однако, подобно тому, как комплексные числа могут использоваться при промежуточных вычислениях в задачах, решение которых должно быть действительным числом, рассмотрение винтов в качестве шестимерных векторов в определенных ситуациях может быть полезным и удобным.
При рассмотрении винта в качестве шестимерного вектора удобно использовать формализм и методы линейной алгебры. В этом случае винты одного типа (кинематические или силовые) могут считаться элементами шестимерного линейного пространства R6, т.е. группу винтов W, включающую все винты wi, можно рассматривать в качестве линейного пространства, порожденного этими винтами. Физический смысл размерности пространства W при этом сохраняется: если количество линейно независимых силовых винтов wi меньше шести (т.е. dim(W) < 6), то выходное звено механизма будет иметь неконтролируемую мгновенную подвижность. В таком случае говорят о попадании механизма либо в особое положение типа 2 по классификации Х. Анжелеса и К. Госслена [7], либо в особое положение, характеризующееся вырождением связей (англ. сonstraint singularity) [21]. Конкретный вид особого положения зависит от характера вырождения винтов с учетом их типа (винты связи или приводные винты). Если же механизм не находится в особом положении и функционирует корректно, то размерность пространства W будет равна шести. Таким образом, очевидно, что количество винтов wi в работоспособном механизме в неособом положении должно быть больше, либо равно шести.
Для начала кратко рассмотрим последовательность анализа близости к особым положениям при отсутствии линейной зависимости между силовыми винтами [17] т.е. будем считать, что N = 6. Выделим некоторую пятичленную группу силовых винтов W1. С точки зрения линейной алгебры, W1 – линейное подпространство пространства W (dim(W) = 6), порожденное пятью винтами wi. Тогда уравнение (1) можно переписать в виде
(2)
$\sum\limits_{j = 1}^5 {{{r}_{{1,j}}} \cdot {{{\mathbf{w}}}_{{1,j}}}} + {{r}_{i}} \cdot {{{\mathbf{w}}}_{i}} = {\mathbf{p}},$Очевидно, что всего существует шесть способов выделить один винт wi, и, соответственно, шесть возможных подпространств W1. Известно, что при приближении к особому положению будет возрастать как минимум одна из обобщенных реакций ri. Это утверждение эквивалентно по своей сути тому, что угол между как минимум одним силовым винтом wi и подпространством W1, будет уменьшаться. При этом алгоритм расчета значения упомянутой реакции весьма относительно прост [22]. Пусть τ1 – кинематический винт, взаимный любому силовому винту из W1
(3)
${{{\mathbf{\tau }}}_{1}} \circ {{{\mathbf{w}}}_{{1,j}}} = 0\quad \forall {{{\mathbf{w}}}_{{1,j}}} \in {{{\mathbf{W}}}_{1}},$Поскольку dim(W1) = 5, выражение (3) является достаточным для определения единственного с точностью до множителя кинематического винта τ1. На практике найти координаты винта τ1 можно, например, путем вычисления ортогонального дополнения матрицы координат силовых винтов, порождающих W1, любым из известных методов линейной алгебры. Кроме того, взаимность указанного кинематического винта всем силовым винтам из W1 позволяет исключить первое слагаемое левой части уравнения (2)
(4)
${{r}_{i}} \cdot {{{\mathbf{w}}}_{i}} \circ {{{\mathbf{\tau }}}_{1}} = {\mathbf{p}} \circ {{{\mathbf{\tau }}}_{1}}.$Соответственно, обобщенную реакцию ri можно легко определить из выражения (4).
Теперь рассмотрим случай, при котором N > 6. Тогда для части силовых винтов wi будет иметь место линейная зависимость, поскольку размерность пространства любых (силовых или кинематических) винтов не может превышать шести. Исходную группу силовых винтов W можно некоторым конечным числом способов выделить две группы W1 и W2 таким образом, что одна из них будет пятичленной. Иными словами, W1 и W2 можно рассматривать как два подпространства, при этом размерность одного из них будет равна пяти. Однако в отличие от случая, когда N = 6, размерность второго подпространства при этом не обязательно будет равна единице. Этот факт легко проиллюстрировать на следующей аналогии. Пусть в трехмерном Евклидовом пространстве имеется четыре вектора, причем среди них нет коллинеарных, а также не существует плоскости, проходящей через три любых вектора (рис. 1).
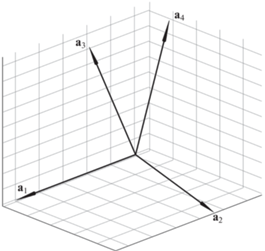
Очевидно, что четыре указанных вектора можно разделить на две группы, в каждой из которой будет по два вектора, например а1, а2 и а3, а4. При этом размерность подпространства в R3, порождаемого каждой группой векторов, будет равна двум (два вектора задают плоскость), что на единицу меньше размерности Евклидова пространства, в котором находятся данные вектора.
Уравнение (1) с учетом выделения из пространства силовых винтов W подпространств W1 и W2 можно записать как
(5)
$\sum\limits_{j = 1}^{{{N}_{1}}} {{{r}_{{1,j}}} \cdot {{{\mathbf{w}}}_{{1,j}}}} + \sum\limits_{k = 1}^{{{N}_{2}}} {{{r}_{{2,k}}} \cdot {{{\mathbf{w}}}_{{2,k}}}} = {\mathbf{p}},$Без потери общности будем считать, что пяти будет равна размерность подпространства W1. Тогда, как и в случае с N = 6 можно найти единственный с точностью до множителя кинематический винт τ1 с помощью выражения (3). Тогда, с учетом взаимности винта τ1 всем винтам подпространства W, выражение (5) примет вид
(6)
$\sum\limits_{k = 1}^{{{N}_{2}}} {{{r}_{{2,k}}} \cdot {{{\mathbf{w}}}_{{2,k}}} \circ {{{\mathbf{\tau }}}_{1}}} = {\mathbf{p}} \circ {{{\mathbf{\tau }}}_{1}}.$Заменим линейную комбинацию в левой части выражения (6) некоторым винтом w2Σ с соответствующей обобщенной реакцией r2Σ
(7)
${{r}_{{2\Sigma }}} \cdot {{{\mathbf{w}}}_{{2\Sigma }}} \circ {{{\mathbf{\tau }}}_{1}} = {\mathbf{p}} \circ {{{\mathbf{\tau }}}_{1}}.$Из выражений (4) и (7) видно, что максимальное значение обобщенной реакции ri или r2Σ соответствует такому направлению силового винта внешней нагрузки p, при котором его координаты пропорциональны координатам винта τ1 следующим образом:
(8)
${\mathbf{p}} \propto \left( {\begin{array}{*{20}{c}} {{{{\mathbf{0}}}_{3}}}&{{{{\mathbf{I}}}_{3}}} \\ {{{{\mathbf{I}}}_{3}}}&{{{{\mathbf{0}}}_{3}}} \end{array}} \right) \cdot {{{\mathbf{\tau }}}_{1}},$Если N = 6, то силовой винт wi известен. Соответственно, для заданной нормы внешней нагрузки ||p|| можно рассчитать наибольшее возможное значение обобщенной реакции ri, которое затем можно пересчитать в реакции в опорах, усилия в приводах и т.д. [17]. В свою очередь указанные параметры могут служить критериями близости к особым положениям механизма.
При N > 6 винт w2Σ не определен – в качестве такого винта может выступать любая линейная комбинация винтов, принадлежащих подпространству W2. Более того, указанный винт теоретически может принадлежать W1. Эту возможность легко продемонстрировать на рассмотренном ранее примере с четырьмя векторами в трехмерном Евклидовом пространстве (рис. 1). Плоскости, образованные векторами а1, а2 и а3, а4 пересекаются, поэтому существует такая линейная комбинация, векторов а3, а4, которая будет лежать на линии пересечения плоскостей, а значит и в плоскости а1, а2.
Очевидно, что если бы винт w2Σ попадал в пересечение подпространств W1 и W2, то размерность пространства всех винтов механизма была бы равна пяти, что невозможно физически, поскольку существуют ненулевые силовые винты, способные воспринимать нагрузку в направлении, ортогональном W1. Пусть силовой винт p удовлетворяет условию (8), т.е. не может быть воспринят винтами, входящими в W1. Тогда, исходя из принципа наименьшего сопротивления, и при допущении, что кинематические цепи считаются абсолютно жесткими, можно предположить, что линейная комбинация винтов подпространства W2 будет такой, чтобы значение реакции r2Σ было минимально возможным. Тогда очевидно, что чем меньше угол между винтом p и пространством W2, тем меньшее значение будет иметь обобщенная реакция r2Σ. В то же время, при приближении к особому положению этот угол будет увеличиваться, а угол между подпространствами W1 и W2 – уменьшаться. Таким образом, угол между указанными подпространствами может служить критерием близости к особым положениям. Такая мера близости к особым положениям и отвечает требованиям, сформулированным Ф. Волглевидом [18]: ее значение положительно вне особых положений и равно нулю в особом положении и только в нем.
Пример расчета. В качестве примера рассмотрим хорошо известный плоский механизм в исполнении 4-RRR (рис. 2).
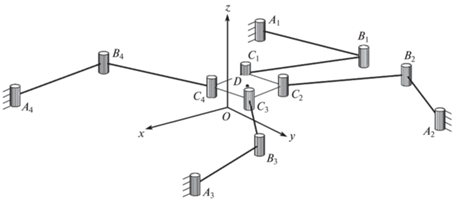
Механизм имеет четыре цепи, каждая из которых состоит из трех последовательных вращательных шарниров Ai, Bi, Ci, оси которых параллельных друг другу и оси z неподвижной системы координат Oxyz. Выходное звено (точка D) имеет три степени свободы: два перемещения в плоскости, Oxy и поворот вокруг оси, проходящей через D и параллельной Oz. Приводными являются первые пары (Ai) в каждой цепи. Наличие четырех кинематических цепей дает механизму приводную избыточность.
Приведем краткие сведения о винтах механизма, начав с кинематических tAi, tBi, tCi (рис. 3).

Все винты являются винтами нулевого параметра с осью, направленной параллельно оси Oz. Принимая точку О в качестве точки приведения винтов, запишем их Плюккеровы координаты
(9)
$\begin{gathered} {{{\mathbf{t}}}_{{Ai}}} = \left[ {0,0,1,{{y}_{{Ai}}}, - {{x}_{{Ai}}},0} \right], \\ {{{\mathbf{t}}}_{{Bi}}} = \left[ {0,0,1,{{y}_{{Bi}}}, - {{x}_{{Bi}}},0} \right], \\ {{{\mathbf{t}}}_{{Ci}}} = \left[ {0,0,1,{{y}_{{Ci}}}, - {{x}_{{Ci}}},0} \right], \\ \end{gathered} $Для каждой цепи будет существовать три силовых винта связи wсв, взаимных кинематическим винтам цепи. Из (9) легко видеть, что винты связи для всех кинематических цепей будут одинаковы и будут иметь координаты
(10)
$\begin{gathered} {\mathbf{w}}_{{{\text{св}}}}^{{ox}} = \left[ {0,0,0,1,0,0} \right], \\ {\mathbf{w}}_{{{\text{св}}}}^{{oy}} = \left[ {0,0,0,0,1,0} \right], \\ {\mathbf{w}}_{{{\text{св}}}}^{z} = \left[ {0,0,1,0,0,0} \right]. \\ \end{gathered} $В выражении (10) винты ${\mathbf{w}}_{{{\text{св}}}}^{{ox}}$ и ${\mathbf{w}}_{{{\text{св}}}}^{{oy}}$ запрещают вращение выходного звена вокруг осей, параллельных Ox и Oy соответственно, а винт ${\mathbf{w}}_{{{\text{св}}}}^{z}$ запрещает линейное перемещение вдоль оси Oz.
Также в каждой i-й цепи будет существовать один приводной силовой винт wai, взаимный кинематическим винтам tBi, tCi и не входящим в подпространство винтов связей, порождаемое винтами (10). Такой винт будет иметь нулевой параметр, а его ось будет направлена вдоль звена BiCi. Координаты винта можно записать как
(11)
${{{\mathbf{w}}}_{{{\text{а}}i}}} = \left[ {{{x}_{C}} - {{x}_{B}},{{y}_{C}} - {{y}_{B}},0,0,0,{{y}_{B}}({{x}_{B}} - {{x}_{C}}) - {{x}_{B}}({{y}_{B}} - {{y}_{C}})} \right].$Таким образом, в рассматриваемом механизме имеется три силовых винта связи и четыре приводных винта, т.е. общее количество силовых винтов равно семи.
Перейдем теперь непосредственно к рассмотрению механизма со следующими размерами: AiBi = BiCi = 0.25 м; точки Аi расположены в углах квадрата со стороной 0.6 м и центром в точке O, выходное звено также представляет собой квадрат со стороной 0.1 м. Для каждой кинематической цепи механизма существует два возможных решения обратной задачи о положениях, соответственно для всего механизма таких решений, называемых также “сборками”, в общем случае существует шестнадцать. Рассмотрим такую сборку, при которой возможно попадание механизма в особое положение (рис. 4).
Рис. 4.
Вид механизма сверху: (а) – произвольное положение, не являющееся особым; (б) – особое положение типа 2.
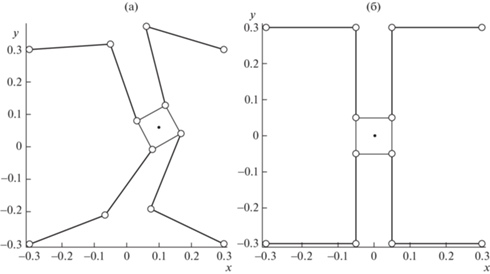
Механизм находится в особом положении (рис. 4б), если его выходное звено находится в точке с координатами x = 0, y = 0 при угле поворота платформы также равном нулю. В этом случае все звенья BiCi параллельны друг другу и оси Oy, а значит, исходя из (11), первая компонента всех винтов wai будет равна нулю. Таким образом, произойдет вырождение подпространства, образованного данными винтами, а выходное звено получит возможность неконтролируемого перемещения вдоль оси Ox.
Поскольку соседние положения выходного звена особыми являться не будут, для демонстрации рассмотрим движение выходного звена из точки с координатой x = –0.1 в точку с координатой x = 0.1 при постоянном значении y = 0 и неизменной ориентации платформы с нулевым углом поворота.
Как можно видеть из (10) и (11) подпространство винтов связей всегда постоянно, поэтому при разделении пространства винтов механизма на подпространства W1 и W2 логично поступить следующим образом: в подпространство W1 включить все три винта связей и два любых приводных винта, а в подпространство W2 – да оставшихся приводных винта. Можно видеть, что в таком случае существует шесть возможных неповторяющихся пар винтов wai, т.е. подпространство W2 можно сформировать следующими шестью возможными комбинациями винтов wai:
(12)
$\begin{gathered} {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а1}}}}},{{{\mathbf{w}}}_{{{\text{а2}}}}}} \right\},\quad {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а1}}}}},{{{\mathbf{w}}}_{{{\text{а3}}}}}} \right\},\quad {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а1}}}}},{{{\mathbf{w}}}_{{{\text{а4}}}}}} \right\}, \\ {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а2}}}}},{{{\mathbf{w}}}_{{{\text{а3}}}}}} \right\},\quad {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а2}}}}},{{{\mathbf{w}}}_{{{\text{а4}}}}}} \right\},\quad {{{\mathbf{W}}}_{2}} = {\text{span}}\left\{ {{{{\mathbf{w}}}_{{{\text{а3}}}}},{{{\mathbf{w}}}_{{{\text{а4}}}}}} \right\}. \\ \end{gathered} $При этом важно отметить, что поскольку вырождение пространства винтов всего механизма происходит только за счет винтов wai, первая строка выражения (12), по сути, эквивалентна второй. Действительно, при рассмотрении, например, пары винтов wa1 и wa2 в качестве порождающих для подпространства W2, в подпространство W1 будут включены винты wa3 и wa4, и наоборот. Но поскольку винты связей всегда неизменны и всегда ортогональны винтам wai, угол между подпространствами W1 и W2 будет зависеть только от выбора пары винтов wai. Поэтому вне зависимости от того, какая из указанных выше пар войдет в подпространство W1, а какая будет порождать пространство W2, результат расчета угла между подпространствами W1 и W2 будет одинаков.
На рис. 5 представлены графики изменения значения угла γ между подпространствами W1 и W2 для вариантов, представленных в первой строке выражения (12). Расчет значений углов проводился в среде MATLAB с помощью встроенной функции subspace(…), использующей известные методы [24, 25].
Рис. 5.
Изменение угла между подпространствами W1 и W2: 1 – W2 = span{wa1, wa2}; 2 – W2 = span{wa1, wa3}; 3 – W2 = span{wa1, wa4}.
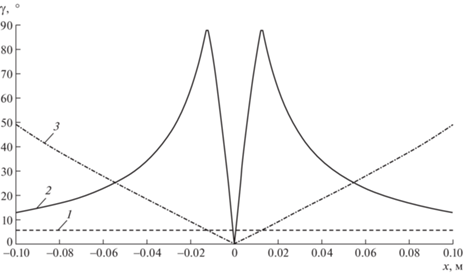
Можно видеть, что в двух из трех возможных вариантах разбиения пространства винтов на подпространства W1 и W2 угол γ оказывается равным нулю при x = 0. При этом характер изменения вариантов 2 и 3 кардинально различается. В первом случае наблюдается рост значения угла γ практически до максимального значения, равного 90о, который затем сменяется его резким уменьшением при приближении к x = 0. Возможность такого поведения для другого параметра (определителя матрицы Якоби), позволяющего оценивать близость к особым положениям, упоминалась, в частности, Ж.-П. Мерле [26]. Во втором же случае отмечается плавное уменьшение значения угла γ на всем протяжении анализируемой траектории.
Поскольку для возникновения особого положения достаточно равенства нулю угла между подпространствами W1 и W2 хотя бы для одного варианта распределения силовых винтов по указанным подпространствам, для оценки близости к особому положению целесообразно рассматривать в каждой точке минимальное из всех рассчитанных значение угла γ
(13)
${{\gamma }_{{\min }}} = \min \left( {{{\gamma }_{1}},{{\gamma }_{2}},...,{{\gamma }_{m}}} \right),$Для рассмотренного примера такой подход будет означать, что вблизи точки x = 0 в качестве расчетного значения γmin необходимо рассматривать значение угла γ, вычисленное для третьего варианта формирования W2, а при удалении от данной точки – для первого варианта.
Значение угла γ напрямую связано со значением обобщенной реакции r2Σ. Учитывая (8) и (3), а также полагая, что силовой винт w2Σ является единичным, можно записать выражение (7) как
Евклидова норма в данном случае лишена физического смысла, т.к. p включает две разные по физической сути величины (силу и момент силы). Однако компоненты p могут быть нормализованы отдельно друг от друга, что было показано в работе [17]. Рассчитанное согласно (14) значение обобщенной реакции r2Σ будет представлять собой своего рода “наихудший” возможный случай распределения нагрузки между частью силовых винтов при наличии линейной зависимости в пространстве силовых винтов всего механизма. При отсутствии же линейной зависимости описанный метод эквивалентен представленному в работе [17]. Основным достоинством метода, представленного в настоящей статье, является возможность непрерывного анализа близости к особым положениям, что невозможно при рассмотрении только ранга матрицы силовых винтов механизма [27]. В качестве недостатка можно отметить, что рассмотренный критерий сам по себе не имеет физического смысла и больше подходит для академических исследований, а не для использования при непосредственном конструировании конкретных устройств на базе механизмов параллельной структуры. За счет показанной связи с обобщенной реакцией, этот недостаток может быть скомпенсирован, однако в таком случае потребуется расчет жесткости элементов механизма с целью уточнения распределения внешней нагрузки по линейно зависимым силовым винтам.
Заключение. В настоящей статье рассмотрена возможность анализа близости к особым положениям механизмов параллельной структуры с использованием в качестве критерия близости минимального значения угла между двумя подпространствами силовых винтов механизма. Теоретические выкладки, показывают, что данный критерий можно использовать для механизмов, в которых суммарное число силовых винтов связи и приводных винтов больше шести. Указанный угол имеет нулевое значение в особом положении механизма и значения, большие нуля, в остальных положениях. В качестве примера был рассмотрен плоский 4-RRR механизм с приводной избыточностью. В результате расчетов была продемонстрирована возможность использования предложенного критерия и показана его связь с обобщенными реакциями механизма.
Список литературы
Глазунов В.А. Механизмы параллельной структуры и их применение: робототехнические, технологические, медицинские, обучающие системы. Москва-Ижевск: Ижевский институт компьютерных исследований, 2018. 1036 с.
Liu G., Lou Y., Li Z. Singularities of Parallel Manipulators: A Geometric Treatment // IEEE Transactions on Robotics and Automation. 2003. V. 19 (4). P. 579.
Глазунов В.А., Рашоян Г.В., Алешин А.К. и др. Особенности сингулярных положений пространственных l-координатных механизмов параллельной структуры // Передача, прием, обработка и отображение информации о быстропротекающих процессах: Сборник статей, Сочи, 01–10 октября 2018 г. С. 250.
Рашоян Г., Алешин А., Скворцов С. и др. Задачи кинематического анализа и особых положений механизмов роботов параллельной структуры // Проблемы машиностроения и надежности машин. 2018. № 4. С. 11.
Рашоян Г.В., Шалюхин К.А., Алешин А.К. Анализ кинематики механизма параллельной структуры со свойствами кинематической развязки // Вестник научно-технического развития. 2018. № 1 (125). С. 32.
Алешин А.К., Глазунов В.А., Рашоян Г.В., Оффер Ш. Анализ кинематических винтов, определяющих топологию сингулярных зон роботов параллельной структуры // Проблемы машиностроения и надежности машин. 2016. № 4. С. 3.
Gosselin C.M., Angeles J. Singularity analysis of closed-loop kinematic chains // IEEE Transactions on Robotics and Automation. 1990. V. 6 (3). P. 281.
Zlatanov D., Fenton R.G., Benhabib B. A Unifying Framework for Classification and Interpretation of Mechanism Singularities // ASME J. of Mechanical Design. 1995. V. 117 (4). P. 566.
Bohigas O., Zlatanov D., Manubens M., Ros L. On the Numerical Classification of the Singularities of Robot Manipulators // Proceedings of the ASME 2012 Int. Design Engineering Technical Conf. and Computers and Information in Engineering Conf. Volume 4: 36th Mechanisms and Robotics Conference, Parts A and B. Chicago, Illinois, USA. August 12–15, 2012. P. 1287.
Slavutin M., Shai O., Sheffer A., Reich Y. A Novel Criterion for Singularity Analysis of Parallel Mechanisms // Mechanism and Machine Theory. 2019. V. 137. P. 459.
Chen X., Liu X.-J., Xie F. Screw Theory Based Singularity Analysis of Lower-Mobility Parallel Robots considering the Motion/Force Transmissibility and Constrainability // Mathematical Problems in Engineering. 2015. V. 2015. 487956.
Gosselin C.M., Angeles J. A global performance index for the kinematic optimization of robotic manipulators // ASME J. of Mechanical Design. 1991. V. 113 (3). P. 220.
Merlet J.-P. Jacobian, manipulability, condition number, and accuracy of parallel robots // ASME J. of Mechanical Design. 2006. V. 128 (1). P. 199.
Chen C., Angeles J. A Generalized Transmission Index for Spatial Linkages // Proceedings of the ASME 2005 IDETC/CIE Conf., Long Beach, CA, USA. 2005. P. 749.
Balli S., Chand S. Transmission angle in mechanisms // Mechanism and Machine Theory. 2022. V. 37 (2). P. 175.
Sutherland G., Roth B. A transmission index for spatial mechanisms // ASME J. of Manufacturing Science and Engineering. 1973. V. 95 (2). P. 589.
Laryushkin P.A., Glazunov V.A. On the Estimation of Closeness to Singularity for Parallel Mechanisms Using Generalized Velocities and Reactions // 14th Int. Federation for the Promotion of Mechanism and Machine Science World Congress, IFToMM-2015. 2015. Taipei, October 25–30. 127160.
Voglewede P., Ebert-Uphoff I. Overarching framework for measuring closeness to singularities of parallel manipulators // IEEE Transactions on Robotics. 2005. V. 21 (6). P. 1037.
Ларюшкин П.А. Экспериментальное исследование передачи усилия в механизме типа Delta, с четырьмя степенями свободы // Проблемы машиностроения и надежности машин. 2021. № 5. С. 3.
Диментберг Ф.М. Винтовое исчисление и его приложения к механике. М.: Наука, 1965. 200 с.
Zlatanov D., Bonev I., Gosselin C.M. Constraint singularities of parallel mechanisms // Proceedings of the 2002 IEEE Int. Conf. on Robotics and Automation. Washington, DC, May 11–15, 2002. V. 1. P. 496.
Mohamed M.G., Duffy J. A Direct Determination of the Instantaneous Kinematics of Fully Parallel Robot Manipulators // J. of Mechanisms, Transmissions and Automation in Desing. 1985. V. 107 (2). P. 226.
Глазунов В.А., Колискор А.Ш., Крайнев А.Ф. Пространственные механизмы параллельной структуры. М.: Наука, 1991. 95 p.
Wedin P.-A. On Angles Between Subspaces of a Finite Dimensional Inner Product Space // Matrix Pencils, Lecture Notes in Mathematics. Havsbad, Sweden, 1983. P. 263.
Bjorck A., Golub G. Numerical Methods for Computing Angles Between Linear Subspaces // Mathematics of Computation. 1973. V. 27 (123). P. 579.
Merlet J.-P. Parallel Robots. 2-nd edition. Springer, 2006. 402 p.
Ларюшкин П.А., Рашоян Г.В., Эрастова К.Г. Об особенностях применения винтового исчисления для оценки близости к особым положениям механизмов параллельной структуры // Проблемы машиностроения и надежности машин. 2017. № 4. С. 39.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин