

Проблемы машиностроения и надежности машин, 2023, № 1, стр. 16-25
Колебания составной цилиндрической оболочки в жидкости, возбуждаемые дискретной и распределенной нагрузкой
О. И. Косарев *
Институт машиноведения им. А.А. Благонравова РАН,
Москва, Россия
* E-mail: kosarevoi@yandex.ru
Поступила в редакцию 06.07.2022
Принята к публикации 20.10.2022
- EDN: ASAXNL
- DOI: 10.31857/S0235711923010078
Аннотация
Предложен метод расчета вынужденных колебаний составной цилиндрической оболочки, погруженной в жидкость, возбуждаемой совместно дискретными силами и распределенной по длине нагрузкой. Система состоит из цилиндрических оболочек (отсеков), соединенных упругими кольцами.
Рассматривается задача о вынужденных колебаниях составной оболочки со свободными краевыми условиями, погруженной в жидкость. Конструкция состоит из соединенных между собой цилиндрических оболочек и упругих колец, возбуждаемых дискретной и распределенной нагрузкой.
Задача о вынужденных колебаниях составных оболочек в жидкости может иметь как самостоятельное значение в области акустического проектирования объектов, так и быть частью более сложных задач. Оболочечные конструкции широко применяются в технике. Вопросам колебаний цилиндрических оболочек посвящена обширная литература [1–11]. В большинстве случаев рассматривались бесконечные оболочки или с краевыми условиями Навье. Например, в работе [1] при решении задачи дифракции на цилиндрической оболочке для определения деформаций использовались уравнения колебаний оболочки. Однако решалась плоская задача, т.е. радиальные перемещения оболочки определялись только в плоскости поперечного сечения. В работе [2] рассматривалась бесконечная цилиндрическая оболочка, которая возбуждалась сосредоточенной силой, выраженной через дельта-функцию Дирака. При этом решение для радиальных перемещений было представлено в виде
Задача вынужденных колебаний составной оболочечной конструкции при совместном действии дискретной и распределенной нагрузки является актуальной и, судя по обзору публикаций [1–11], решение ее в настоящее время отсутствует.
Настоящая статья представляет собой развитие и обобщение метода расчета [3] для случая совместного действия дискретной и распределенной нагрузки. В работе [3] рассмотрены колебания составной оболочки, возбуждаемые дискретными силами, приложенными к кольцам. В отличие от [3] в настоящей статье изучаются вынужденные колебания составной цилиндрической оболочки в случае возбуждения колебаний совместно дискретными силами и распределенной нагрузкой (давлением).
Динамическая модель составной оболочки, состоящей из секций (отсеков), каждая из которых представляет собой упругую цилиндрическую оболочку с упругими кольцами на концах (торцах), показана на рис. 1 [3].

Здесь, так же, как в [3], при расчете колебаний составная оболочка условно разбивается на подсистемы, включающие оболочки (отсеки) и кольца. Для каждой оболочки (отсека) составляются дисперсионные уравнения и определяются их корни. Функция распределения перемещений оболочек (отсеков) по их длине записывается через перемещения торцевых сечений.
Целью является разработка метода расчета вынужденных колебаний составной цилиндрической оболочки в жидкости, возбуждаемых совместно дискретной и распределенной нагрузками. Дискретная нагрузка – это силы, сосредоточенные по длине оболочки (по окружности они распределены по гармоническому закону cos nφ и sin nφ), а распределенная нагрузка – это давление на оболочку окружающей среды.
Новизна разработки заключается в учете совместного действия двух типов нагрузок, из которых метод расчета вынужденных колебаний, возбуждаемых динамическим давлением, конечной составной цилиндрической оболочки со свободными краевыми условиями, погруженной в жидкость, является новым.
Полезность разработки обусловлена следующим обстоятельством. В ряде случаев вибрации передаются на корпус, моделируемый цилиндрической оболочкой, по металлической конструкции и по окружающей среде (в частности жидкости). Дополнительный учет второго пути расширяет возможности метода расчета, делает его более универсальным и повышает его точность.
Ниже приведены формулы, относящиеся к оболочке-отсеку, или из нескольких соединенных оболочек-отсеков и колец.
Уравнения движения цилиндрической оболочки в перемещениях, основаны на моментной теории упругих оболочек Кирхгофа–Лява, имеют вид [4, 5]
(1)
$\begin{gathered} \frac{{\partial {{T}_{1}}}}{{\partial z}} + \frac{{\partial S}}{{\partial \varphi }} - {{\rho }_{*}}ha\frac{{{{\partial }^{2}}u}}{{\partial {{t}^{2}}}} + a{{q}_{1}} = 0, \\ \frac{{\partial {{T}_{2}}}}{{\partial \varphi }} + \frac{{\partial S}}{{\partial z}} + \frac{1}{a}\left( {\frac{{\partial {{M}_{2}}}}{{\partial \varphi }} + 2\frac{{\partial H}}{{\partial z}}} \right) - {\text{ }}{{\rho }_{*}}ha\frac{{{{\partial }^{2}}{v}}}{{\partial {{t}^{2}}}} + a{{q}_{2}} = 0, \\ \frac{1}{a}\left( {\frac{{{{\partial }^{2}}{{M}_{1}}}}{{\partial {{z}^{2}}}} + 2\frac{{{{\partial }^{2}}H}}{{\partial z\partial \varphi }} + \frac{{{{\partial }^{2}}{{M}_{2}}}}{{\partial {{\varphi }^{2}}}}} \right) - {{T}_{2}} - {{\rho }_{*}}ha\frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}} - a{{q}_{3}} = 0, \\ \end{gathered} $Считаем, что внешняя распределенная нагрузка (давление) действует по нормали к поверхности оболочки (радиально), поэтому принимаем q1 = q2 = 0, q3 = peiθz.
Полные решения уравнений (1) для каждой гармоники n записываются в виде
(2)
$\begin{gathered} u = U{{e}^{{i\omega t}}}\cos n\varphi + u{\kern 1pt} *,\quad {v} = V{{e}^{{i\omega t}}}\sin n\varphi + {v}{\kern 1pt} *,\quad w = W{{e}^{{i\omega t}}}\cos n\varphi + w{\kern 1pt} *{\kern 1pt} , \\ U = {\text{ }}\sum\limits_{j = 1}^8 {{{C}_{{jn}}}} \frac{{\Delta _{{jn}}^{{\left( 2 \right)}}}}{{\Delta _{{jn}}^{{\left( 1 \right)}}}}{\text{ }}{{e}^{{\lambda z}}},\quad V = {\text{ }}\sum\limits_{j = 1}^8 {{{C}_{{jn}}}} \frac{{\Delta _{{jn}}^{{\left( 3 \right)}}}}{{\Delta _{{jn}}^{{\left( 1 \right)}}}}{\text{ }}{{e}^{{\lambda z}}},\quad W = {\text{ }}\sum\limits_{j = 1}^8 {{{C}_{{jn}}}} {{e}^{{\lambda z}}}, \\ \end{gathered} $Для определения показателей экспонент λ, являющихся корнями дисперсионного уравнения, подставим в уравнение (1) решения вида
(3)
$\left[ {\begin{array}{*{20}{c}} {{{L}_{{11}}} + \omega _{*}^{2}}&{{{L}_{{12}}}}&{{{L}_{{13}}}} \\ { - {{L}_{{12}}}}&{{{L}_{{22}}} + \omega _{*}^{2}}&{{{L}_{{23}}}} \\ { - {{L}_{{13}}}}&{{{L}_{{23}}}}&{{{L}_{{33}}} + \omega _{*}^{2}} \end{array}} \right] \cdot \left\{ {\begin{array}{*{20}{c}} U \\ V \\ W \end{array}} \right\} = \frac{a}{g}\left\{ {\begin{array}{*{20}{c}} 0 \\ 0 \\ {{{q}_{3}}} \end{array}} \right\},$Элементы левой матрицы Li, j в уравнении (3)
(4)
${{L}_{{23}}} = {{L}_{{32}}} = - n\left[ {1 + {{b}_{2}} + \frac{{{{z}_{2}}{{b}_{2}}}}{r} - \left( {2 - \mu } \right){{\delta }^{2}}{{\lambda }^{2}} + {{n}^{2}}\left( {{{\delta }^{2}} + \frac{{{{z}_{2}}{{b}_{2}}}}{r} + \frac{{{{a}_{2}}}}{{{{r}^{2}}}}} \right)} \right],$Миноры и определитель матрицы Li, j левой части уравнения (3)
(5)
$\begin{gathered} \Delta _{{}}^{{(3)}} = - {{L}_{{13}}}{{L}_{{12}}} - ({{L}_{{11}}} + \omega _{*}^{2}){{L}_{{23}}}, \\ {{\Delta }_{0}} = ({{L}_{{11}}} + \omega _{*}^{2})({{L}_{{22}}} + \omega _{*}^{2})({{L}_{{33}}} + \omega _{*}^{2}) - {{L}_{{12}}}{{L}_{{23}}}{{L}_{{13}}} - {{L}_{{13}}}{{L}_{{12}}}{{L}_{{23}}} + \\ \end{gathered} $Корни дисперсионного уравнения с учетом замены λ = iα определяются из решения дисперсионного уравнения [3]
(6)
$\frac{{{{\Delta }_{0}}(\alpha )}}{{{{\Delta }^{{(1)}}}(\alpha )}} - \frac{{{{\rho }_{0}}{{\omega }^{2}}aH_{n}^{{(2)}}(ka)}}{{gkH_{n}^{{(2)}}{\kern 1pt} '{\kern 1pt} (ka)}} = 0,$Из решения дисперсионного уравнения (6) определяются восемь корней αj в решении (2), для каждой гармоники n на каждой частоте колебаний f.
Вынужденные колебания, возбуждаемые дискретными силами Р, приложенными к кольцам, передаются на оболочки через их связи с кольцами. Кольца могут быть как реальными, так и виртуальными (безынерционными), расположенными при необходимости в любом месте на оболочке, где нужно приложить силы. Непосредственно на поверхность оболочки действует только распределенная нагрузка (давление) q3 = peiθz, которая возбуждает вынужденные колебания оболочки.
Определим частые решения вынужденных колебаний оболочки. Частные решения u* = U*eiωt cos nφ, ${v}{\kern 1pt} *$ = V*eiωt sin φ, w* = W*eiωt cos nφ уравнения вынужденных колебаний оболочки от действия распределенной нагрузки q3 = peiθz определим из решения уравнения (3), обозначив матрицу в левой части уравнения (3) Li, j, где λ = iθ
Радиальные перемещения будут
Определим зависимости, связывающие текущие перемещения поверхности оболочки с перемещениями ее концов. Предварительно к трем перемещениям u, ${v}$, w добавим четвертое перемещение, производную w' = ∂w/∂z, угол поворота. Перемещение w' добавлено для возможности состыковки оболочек и колец по четырем силовым факторам, для проведения преобразований перемещений и составления сводного уравнения колебаний составной оболочки в матричной форме.
Перемещения свободных колебаний представим вектором четвертого порядка
Частные решения, перемещения вынужденных колебаний, с учетом
Полные решения (2) представим в матричной форме
Обозначим
Преобразуем выражение ζ(z), чтобы текущие перемещения выразить через перемещения концов оболочки. Обозначим
В краткой записи текущее перемещение
Перемещения на концах оболочки при z = 0 и z = $\ell $
В матричной форме
Отсюда путем обращения матрицы, найдем
(7)
$\begin{gathered} {{С}_{j}} = {{\left[ \begin{gathered} G(0) \hfill \\ G(l) \hfill \\ \end{gathered} \right]}^{{ - 1}}}\left\{ \begin{gathered} \zeta (0) - \zeta {\kern 1pt} *{\kern 1pt} (0) \hfill \\ \zeta (\ell ) - \zeta {\kern 1pt} *{\kern 1pt} (\ell ) \hfill \\ \end{gathered} \right\} = \left[ {{{B}_{1}},{{B}_{2}}} \right]\left\{ \begin{gathered} \zeta (0) - \zeta {\kern 1pt} *{\kern 1pt} (0) \hfill \\ \zeta (l) - \zeta {\kern 1pt} *{\kern 1pt} (l) \hfill \\ \end{gathered} \right\} = \\ = {{B}_{1}}(\zeta (0) - {{\zeta }_{{v}}}(0)) + {{B}_{2}}(\zeta (l) - {{\zeta }_{{v}}}(l)). \\ \end{gathered} $В результате получим текущие перемещения в оболочке, выраженные через перемещения ее концов оболочки
(8)
$\zeta (z) = G(z)\left[ {{{B}_{1}}({{\zeta }_{0}} - \zeta _{0}^{*}) + {{B}_{2}}({{\zeta }_{\ell }} - \zeta _{\ell }^{*})} \right] + \zeta {\kern 1pt} *{\kern 1pt} (z),$Матрицы ${{B}_{1}}$, ${{B}_{2}}$ размером 8 × 4 являются блоками квадратной матрицы $B = \left\{ {{{B}_{1}},{{B}_{2}}} \right\}$ размером 8 × 8, (7), а сама матрица $B = {{\left\| {\begin{array}{*{20}{c}} {{{G}_{z}}(0)} \\ {{{G}_{z}}(\ell )} \end{array}} \right\|}^{{ - 1}}}.$
Определим связь внутренних сил и перемещений в оболочке. Согласно моментной теории цилиндрических оболочек, связь внутренних сил и деформаций на срединной поверхности оболочек можно выразить в виде [4, 5]
(9)
$\begin{gathered} S_{1}^{*} = \frac{{Eh}}{{2\left( {1 + \mu } \right)}}\frac{1}{r}\left( {\frac{{\partial u}}{{\partial \varphi }} + \frac{{\partial {v}}}{{\partial z}}} \right) + 2D\left( {1 - \mu } \right)\frac{1}{{{{r}^{2}}}}\left( {\frac{{\partial {v}}}{{\partial z}} - \frac{{{{\partial }^{2}}w}}{{\partial z{\text{ }}\partial \varphi }}} \right), \\ Q_{1}^{*} = \frac{D}{r}\left[ { - \frac{1}{{{{r}^{2}}}}\frac{{{{\partial }^{3}}w}}{{\partial {{z}^{3}}}} + \frac{M}{{{{r}^{2}}}}\left( {\frac{{{{\partial }^{2}}{v}}}{{\partial z\partial \varphi }} - \frac{{{{\partial }^{3}}w}}{{\partial {{\varphi }^{2}}\partial z}}} \right) + \frac{{2\left( {1 - \mu } \right)}}{{{{r}^{2}}}}\left( {\frac{{{{\partial }^{2}}{v}}}{{\partial z\partial \varphi }} - \frac{{{{\partial }^{3}}w}}{{\partial \varphi {\text{ }}\partial {{z}^{2}}}}} \right)} \right], \\ \end{gathered} $После выполнения дифференцирования в (9)
(10)
$\begin{gathered} S_{1}^{*} = g{{e}^{{i\alpha z}}}\frac{{1 - \mu }}{2}\left\{ { - nu + i\alpha \left( {1 + 4{{\delta }^{2}}} \right){v} + 4i\alpha n{{\delta }^{2}}w} \right\}\sin n\varphi , \\ Q_{1}^{*} = g{{e}^{{i\alpha z}}}i\alpha {{\delta }^{2}}\left\{ {\left( {2 - \mu } \right)n{v} + \left[ {\left( {2 - \mu } \right){{n}^{2}} + {{\alpha }^{2}}} \right]w} \right\}\cos n\varphi , \\ \end{gathered} $После подстановки перемещений в (10) получим вектор внутренних сил в сечении оболочки
(11)
$\begin{gathered} \eta \left( z \right) = {{\{ {{T}_{1}},S_{1}^{*},Q_{1}^{*},{M \mathord{\left/ {\vphantom {M r}} \right. \kern-0em} r}\} }^{T}}, \\ \eta (z) = G{\kern 1pt} *{\kern 1pt} (z)[{{B}_{1}}({{\zeta }_{0}} - \zeta _{0}^{*}) + {{B}_{2}}({{\zeta }_{\ell }} - \zeta _{\ell }^{*})] + \Phi W{\kern 1pt} *{\kern 1pt} {{e}^{{i\theta z}}}, \\ \end{gathered} $(12)
$G\left( z \right) = g{{e}^{{i\alpha z}}}\left\| {{\text{ }}\begin{array}{*{20}{c}} {i\alpha \frac{{{{\Delta }^{{(2)}}}}}{{{{\Delta }^{{(1)}}}}} + \mu n\frac{{{{\Delta }^{{(3)}}}}}{{{{\Delta }^{{(1)}}}}} + \mu } \\ {\frac{{{\text{1}} - \mu }}{2}\left( { - n\frac{{{{\Delta }^{{(2)}}}}}{{{{\Delta }^{{(1)}}}}} + i\alpha \frac{{{{\Delta }^{{(3)}}}}}{{{{\Delta }^{{(1)}}}}}\left( {{\text{1}} + 4{{\delta }^{{\text{2}}}}} \right) + 4in\alpha {{\delta }^{2}}} \right)} \\ {i\alpha {{\delta }^{2}}\left( {n\left( {{\text{2}} - \mu } \right)\frac{{{{\Delta }^{{(3)}}}}}{{{{\Delta }^{{(1)}}}}} + \left( {{\text{2}} - \mu } \right){{n}^{{\text{2}}}} + {{\alpha }^{2}}} \right)} \\ {n\mu \frac{{\Delta {}^{{(3)}}}}{{{{\Delta }^{{(1)}}}}}{{\delta }^{{\text{2}}}} + \left( {\mu {{n}^{{\text{2}}}} + {{\alpha }^{2}}} \right){{\delta }^{{\text{2}}}}} \end{array}{\text{ }}} \right\|,$Вектор Φ – определяет реакции в сечениях оболочки в направлениях перемещений ζ(z) при действии внешнего давления
(13)
$\Phi = g{{e}^{{i\theta z}}}\left\| {{\text{ }}\begin{array}{*{20}{c}} {i\theta \frac{{{{\Delta }^{{(2)}}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}} + \mu n\frac{{{{\Delta }^{3}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}} + \mu } \\ {\frac{{1 - \mu }}{2}\left[ { - n\frac{{{{\Delta }^{{(2)}}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}} + i\theta (1 + 4\delta _{{}}^{2})\frac{{{{\Delta }^{{(3)}}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}} + 4i\theta n{{\delta }^{2}}} \right]} \\ {i\theta {{\delta }^{2}}\left\{ {n(2 - \mu )\frac{{{{\Delta }^{{(3)}}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}} + \left[ {(2 - \mu {\text{ }}){{n}^{2}} + {{\theta }^{2}}} \right]} \right\}} \\ {{{\delta }^{2}}\left[ {\mu n\frac{{{{\Delta }^{{(3)}}}(\theta )}}{{{{\Delta }^{{(1)}}}(\theta )}}\theta + ({{\theta }^{2}} + \mu {{n}^{2}})} \right]} \end{array}{\text{ }}} \right\|,$Колебания кольца. Матричное уравнение колебаний кольца для окружных гармоник n ≥ 1
(14)
$\left[ {\begin{array}{*{20}{c}} {{{m}_{{11}}}}&0&0&{{{m}_{{14}}}} \\ 0&{{{m}_{{22}}}}&0&0 \\ 0&0&{{{m}_{{33}}}}&0 \\ {{{m}_{{41}}}}&0&0&{{{m}_{{44}}}} \end{array}} \right]\left\{ {\begin{array}{*{20}{c}} u \\ {v} \\ w \\ {\vartheta R} \end{array}} \right\} = \left\{ {\begin{array}{*{20}{c}} {{{q}_{u}}} \\ {{{q}_{{v}}}} \\ {{{q}_{w}}} \\ {{M \mathord{\left/ {\vphantom {M R}} \right. \kern-0em} R}} \end{array}} \right\},$Кольцо характеризуется параметрами: Rk – радиус центра масс сечения кольца; Е – комплексный модуль упругости материала; ${{\rho }_{*}}$ – плотность материала; F – площадь поперечного сечения; J1 и J3 – моменты инерции поперечного сечения; J13 – центробежный момент инерции; Jt – массовый момент инерции при кручении. На кольцах могут быть упруго закреплены сосредоточенные массы $m_{u}^{\partial }$, $m_{w}^{\partial }$, Cu, Cw – жесткости их крепления. Массы m∂, $m_{w}^{\partial }$ и жесткости Cu, Cw моделируют виброизолированное оборудование, установленное на кольцах.
Приведение перемещений и внутренних сил на концах оболочек к кольцу. В случае, когда к кольцу (слева и справа) крепятся оболочки разного диаметра необходимо выполнить соответствующее приведение координат (перемещений) торцов оболочек к центру масс поперечного сечения кольца.
Векторы перемещений концевых сечений оболочки
Внутренние силы, действующие в торцевых сечениях оболочек (в конце предыдущей оболочки ηk, 1 и в начале последующей оболочки ηk + 1, 0), приведем к соединяющему их кольцу с помощью матриц приведения $H_{k}^{3}$ и $H_{k}^{4}$.
Матрицы преобразования сил, действующих на концы оболочек номер k и k + 1 к центру масс сечения кольца номер k
(15)
$\begin{gathered} f_{k}^{1} = H_{k}^{3}\eta _{{k1}}^{{}},\quad f_{k}^{2} = H_{k}^{4}\eta _{{k + 1,0}}^{{}},\quad \eta _{{k0}}^{{}} = \eta _{k}^{{}}\left( 0 \right),\quad \eta _{{k1}}^{{}} = \eta _{k}^{{}}\left( {{{\ell }_{k}}} \right), \\ H_{k}^{3} = \left\| {{\text{ }}\begin{array}{*{20}{c}} {\frac{{{{r}_{k}}}}{{{{R}_{k}}}}}&{\text{0}}&{\text{0}}&0 \\ {\text{0}}&{\frac{{{{r}_{k}}}}{{{{R}_{k}}}}}&{\text{0}}&{\text{0}} \\ {\text{0}}&{\text{0}}&{\frac{{{{r}_{k}}}}{{{{R}_{k}}}}}&{\text{0}} \\ {\frac{{\left( {{{R}_{k}} - {{r}_{k}}} \right){{r}_{k}}}}{{R_{k}^{2}}}}&{\text{0}}&0&{\frac{{r_{k}^{2}}}{{R_{k}^{2}}}} \end{array}{\text{ }}} \right\|,\quad H_{k}^{4} = \left\| {{\text{ }}\begin{array}{*{20}{c}} {\frac{{{{r}_{{k + 1}}}}}{{{{R}_{k}}}}}&{\text{0}}&{\text{0}}&0 \\ {\text{0}}&{\frac{{{{r}_{{k + 1}}}}}{{{{R}_{k}}}}}&{\text{0}}&{\text{0}} \\ {\text{0}}&{\text{0}}&{\frac{{{{r}_{{k + 1}}}}}{{{{R}_{k}}}}}&{\text{0}} \\ {\frac{{\left( {{{R}_{k}} - {{r}_{{k + 1}}}} \right){{r}_{{k + 1}}}}}{{R_{k}^{2}}}}&{\text{0}}&0&{\frac{{r_{{k + 1}}^{2}}}{{R_{k}^{2}}}} \end{array}{\text{ }}} \right\|. \\ \end{gathered} $Уравнение движения центра масс сечения k-го кольца имеет вид
Подставляя в уравнение движения кольца (16) выражения (8, 11, 12–15) получим систему уравнений относительно векторов Zk: порядка 4(N + 1), где N – количество оболочек; N + 1 – количество колец. Уравнения (16) составляются для каждого кольца последовательно
(17)
$ - \;H_{k}^{4}G_{{k + 1}}^{*}(0){{B}_{{2,k + 1}}}H_{{k + 1}}^{1}{{Z}_{{k + 1}}} = {{P}_{k}} + \left\{ {H{}_{k}^{4}{{\Phi }_{{k + 1}}}W_{{k + 1}}^{*} - H_{k}^{3}{{\Phi }_{k}}W_{k}^{*}{{e}^{{i{{\theta }_{k}}{{\ell }_{k}}}}} + } \right.$Здесь первое уравнение составлено для первого кольца, соединенного с оболочкой справа, второе уравнение – для промежуточного кольца, соединенного с оболочками слева и справа, а третье – для последнего кольца, соединенного с оболочкой слева.
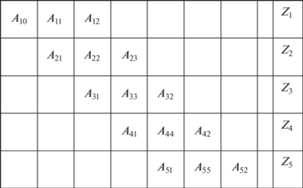
Общее матричное уравнение вынужденных колебаний составной оболочки имеет ленточной вид цепной системы. Уравнение состоит из блок-матриц четвертого порядка, квазидиагонально расположенных. На рис. 2 показана структура матричного уравнения составной оболочки с четырьмя оболочками и пятью кольцами, где крайние блоки А10 = 0 и А52 = 0, потому что перед первым кольцом и после последнего кольца нет оболочек. Такая ленточная структура позволяет быстро решать матричные уравнения высокого порядка (нескольких сотен). В результате решения этой системы определяются искомые векторы перемещений колец Zk.
После определения векторов перемещений Zk на кольцах k из уравнения (17) можно определить амплитудно-частотные характеристики колебаний составной оболочки в заданных сечениях (кольцах) оболочечной конструкции, а также формы вынужденных колебаний составной оболочки в целом.
Заключение. Предложен метод расчета вынужденных колебаний составной оболочки со свободными граничными условиями, включающей соединенные между собой цилиндрические оболочки и упругие кольца, возбуждаемые совместно сосредоточенными и распределенными нагрузками. По отношению к методу [3], где возбуждение задавалось дискретными силами, приложенными к кольцам, метод расширен и дополнен возможностью расчета вынужденных колебаний составной оболочечной системы дискретными силами и динамическим давлением, приложенным к оболочке, что делает метод более универсальным. Дополнительный уточняющий учет возбуждения колебаний оболочки от давления через сжимаемую среду определяет новизну и полезность разработки.
Список литературы
Шендеров Е.Л. Волновые задачи гидроакустики. Л.: Судостроение, 1972. 349 с.
Романов В.Н., Иванов В.С. Излучение звука элементами судовых конструкций. СПб.: Судостроение, 1993. 212 с.
Косарев О.И. Вынужденные колебания цилиндрической оболочки, погруженной в жидкость // Проблемы машиностроения и надежности машин. 2020. № 2. С. 16.
Бидерман В.Л. Механика тонкостенных конструкций. Статика. М.: Машиностроение, 1977. С. 260.
Прочность. Устойчивость. Колебания. Том 3. Справочник / Под ред. И.А. Биргера и Я.Г. Пановко. М.: Машиностроение, 1968. С. 423.
Авербух А.З., Вейцман Р.И., Генкин М.Д. Колебания элементов конструкций в жидкости. М.: Наука, 1987. 158 с.
Абрамов А.А., Конюхова Е.Б., Парийский Б.С. Численные исследования свободных и вынужденных колебаний в сжимаемой среде замкнутых упругих моментных оболочек вращения // Журнал вычислительной математики м математической физики. 1989. Т. 29. № 5. С. 747.
Косарев О.И. Дисперсионное уравнение свободной конечной цилиндрической оболочки, погруженной в жидкость // Проблемы машиностроения и надежности машин. 2019. № 5. С. 36.
Balena F.J., Prydz R.A., Revell J.D. Single and doublewall cylinder noise reduction // J. Airocraft. 1983. V. 20. № 5. P. 434.
Shenck H.A. The efficient calculation and display of dispersion curves for a thin cylindrical shell immersed in a fluid // Proc. ICA 14. 1992. Paper B8-2.
Shvartz A., Samsonov A., Dreiden G, Semenova I. Evolution of bulk stain solution in cylindrical in homogeneus shells // AIP Conf. Proc. 2015. V. 1685.
Дополнительные материалы отсутствуют.
Инструменты
Проблемы машиностроения и надежности машин