

Поверхность. Рентгеновские, синхротронные и нейтронные исследования, 2022, № 5, стр. 67-73
К вопросу об АСМ-измерениях вектора силы взаимодействия посредством интерферометрии, оптического рычага и пьезорезистивного метода
А. В. Анкудинов *
Физико-технический институт им. А.Ф. Иоффе РАН
194021 Санкт-Петербург, Россия
* E-mail: alexander.ankudinov@mail.ioffe.ru
Поступила в редакцию 25.08.2021
После доработки 22.09.2021
Принята к публикации 30.09.2021
- EDN: MLXXLA
- DOI: 10.31857/S1028096022050028
Аннотация
В атомно-силовой микроскопии взаимодействие зонда с образцом, как правило, контролируют методом оптического рычага по углу изгиба кантилевера в выбранной на нем точке. Такой контроль не рассчитан на регистрацию всех трех компонент вектора силы взаимодействия. Выявить эти компоненты и результат действия силы – вектор смещения “недеформируемого” зонда “идеального” кантилевера – можно, проведя дополнительные измерения деформации (пьезорезистивным методом) или величины изгиба (методом интерферометрии) в выбранной точке, либо угла изгиба еще в одной точке на кантилевере. Представлены результаты аналитического расчета оптимального расположения этих точек на кантилевере для шести комбинаций трех названных методов, сводящего ошибку измерений компонент векторов силы и смещения к минимуму.
ВВЕДЕНИЕ
В основе атомно-силовой микроскопии (АСМ) [1] лежит измерение силы взаимодействия зонд–образец. Когда зонд АСМ-кантилевера находится в контакте с образцом, можно, подняв образец на известную высоту, определить угол изгиба кантилевера, линейно связанный с вертикальной компонентой силы [2]. Часто важны все три компоненты силы, например, для манипуляций слабо закрепленными на подложке частицами [3, 4], измерений формы трехмерных объектов [5], исследований пьезоотклика сегнетоэлектрических образцов [6, 7], точных наномеханических экспериментов [8–10]. Приложенная к зонду сила вызывает реакцию кантилевера, которую можно контролировать, регистрируя в выбранной на нем точке механические напряжения пьезорезистивным методом [11–13], углы изгиба и кручения методом оптического рычага [14], вертикальное смещение методом интерферометрии [15]. Комбинируя методы интерферометрии и оптического рычага, можно по смещению и углу изгиба кантилевера определить компоненты силы в плоскости изгиба, а по углу кручения – компоненту, перпендикулярную этой плоскости. Все проекции силы поддаются измерению также при помощи комбинации метода оптического рычага и пьезорезистивного метода.
Метод интерферометрии и пьезорезистивный метод не чувствительны к компоненте силы, перпендикулярной плоскости изгиба. Автономно определить вектор силы целиком позволяет только метод оптического рычага, примененный в двух точках на кантилевере. В [16, 17] обсуждали оптимальное положение этих точек для минимальной ошибки измерений. Было доказано [17], что первое положение совпадает с проекцией вершины зонда на консоль, другое зависит от направления и амплитуды проекции силы на плоскость изгиба консоли и рассчитывается аналитически.
Для практики важно существование зафиксированных на кантилевере оптимальных положений точек для определения компонент произвольно направленной силы. В этой связи в настоящем исследовании при использовании подхода [17] сопоставлены разные комбинации методов пьезорезистивного, оптического рычага, интерферометрии. Специально для этого рассчитаны и проанализированы положения оптимальных точек на кантилевере – одной при сочетании двух методов и двух при использовании одного метода – как функции направления и амплитуды приложенной к зонду силы.
РЕЗУЛЬТАТЫ
АСМ-кантилевер – это консоль длиной lC с зондом высотой lT (рис. 1a). Если к кончику зонда приложить силу F, то ее компоненты FY и FZ изогнут, а компонента FX закрутит консоль [18]. Форма слабого изгиба [19] консоли в плоскости YZ подчиняется уравнению Эйлера–Бернулли:
Левая часть (1) – это произведение модуля Юнга E материала консоли, момента инерции I = = wt 3/12 ее прямоугольного сечения шириной w и толщиной t, локальной кривизны Z ''(Y); правая часть – распределение момента сил, линейная функция координаты Y вдоль консоли (рис. 1а).
Рис. 1.
Изгиб “идеального” кантилевера (а): “недеформируемый” зонд (1), высота lT; консоль (2), длина lС; держатель (3); сила FYZ, изгибая консоль (2 ′), смещает на ${\mathbf{r}}_{{YZ}}^{C}$ зонд (1 ′). Системы координат кантилевера XYZ, сканера XLN (ось N соответствует вертикали, ось X направлена на читателя); угол установки держателя кантилевера α0 ≈ 20° в приборах НТ-МДТ СИ (Россия) и ≈ 10° в Bruker (США); α – локальный угол изгиба; αF и αr – полярные углы векторов FYZ и ${\mathbf{r}}_{{YZ}}^{C}.$ Пример профилей (эпюр) Z '' (кривизны), Z ' (угла изгиба), Z (смещения, изгиба консоли), связанных параметрами a и b из соотношений (2), (3а) и (3б) (б).

Пьезорезистивным методом (ПР) регистрируется связанная с механическим напряжением локальная деформация консоли, следовательно, ее кривизна, пропорциональная моменту сил и при малых изгибах приближенно равная второй производной смещения; методом оптического рычага (ОР) – первообразная кривизны, угол изгиба α; методом интерферометрии (И) – первообразная угла, смещение (величина изгиба) консоли (рис. 1б). Можно записать:
(2)
$\left\{ \begin{gathered} z{\kern 1pt} ''(x) = {{{{\Pi }}}^{{ - 1}}}({{\Delta {{R}_{0}}(x)} \mathord{\left/ {\vphantom {{\Delta {{R}_{0}}(x)} {{{R}_{0}}}}} \right. \kern-0em} {{{R}_{0}}}})({{w{{t}^{2}}} \mathord{\left/ {\vphantom {{w{{t}^{2}}} {2{{k}_{C}}l_{C}^{2}}}} \right. \kern-0em} {2{{k}_{C}}l_{C}^{2}}}),\,\,\,\,{\text{ПР}} \hfill \\ z{\kern 1pt} '(x) = {\text{tg(}}\alpha {\text{(}}x{\text{))}} \cong \alpha (x),~\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,{\text{ОР}} \hfill \\ z(x) = {{Z(x)} \mathord{\left/ {\vphantom {{Z(x)} {{{l}_{C}},}}} \right. \kern-0em} {{{l}_{C}},}}\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,~\,{\text{И}}. \hfill \\ \end{gathered} \right.$Из (1) и (2), также из рис. 1, следует:
(3a)
$\left\{ \begin{gathered} z{\kern 1pt} ''(x) = {{a}^{{\mathbf{F}}}} - {{b}^{{\mathbf{F}}}}x~~~ \hfill \\ z{\kern 1pt} '(x) = {{a}^{{\mathbf{F}}}}x - ({{{{b}^{{\mathbf{F}}}}} \mathord{\left/ {\vphantom {{{{b}^{{\mathbf{F}}}}} 2}} \right. \kern-0em} 2}){{x}^{2}}~~~ \hfill \\ z(x) = ({{{{a}^{{\mathbf{F}}}}} \mathord{\left/ {\vphantom {{{{a}^{{\mathbf{F}}}}} 2}} \right. \kern-0em} 2}){{x}^{2}} - ({{{{b}^{{\mathbf{F}}}}} \mathord{\left/ {\vphantom {{{{b}^{{\mathbf{F}}}}} 6}} \right. \kern-0em} 6}){{x}^{3}}~ \hfill \\ {{a}^{{\mathbf{F}}}} = {{(3{{F}_{Z}} + 3\lambda {{F}_{Y}})} \mathord{\left/ {\vphantom {{(3{{F}_{Z}} + 3\lambda {{F}_{Y}})} {({{k}_{C}}{{l}_{C}}) = }}} \right. \kern-0em} {({{k}_{C}}{{l}_{C}}) = }} \hfill \\ = 3\left| {{{{\mathbf{F}}}_{{YZ}}}} \right|{{(\sin {{\alpha }^{{\mathbf{F}}}} + \lambda \cos {{\alpha }^{{\mathbf{F}}}})} \mathord{\left/ {\vphantom {{(\sin {{\alpha }^{{\mathbf{F}}}} + \lambda \cos {{\alpha }^{{\mathbf{F}}}})} {({{k}_{C}}{{l}_{C}})}}} \right. \kern-0em} {({{k}_{C}}{{l}_{C}})}} \hfill \\ {{b}^{{\mathbf{F}}}} = {{3{{F}_{Z}}} \mathord{\left/ {\vphantom {{3{{F}_{Z}}} {({{k}_{C}}{{l}_{C}})}}} \right. \kern-0em} {({{k}_{C}}{{l}_{C}})}} = 3\left| {{{{\mathbf{F}}}_{{YZ}}}} \right|{{\sin {{\alpha }^{{\mathbf{F}}}}} \mathord{\left/ {\vphantom {{\sin {{\alpha }^{{\mathbf{F}}}}} {({{k}_{C}}{{l}_{C}})}}} \right. \kern-0em} {({{k}_{C}}{{l}_{C}})}} \hfill \\ \lambda = {{{{l}_{T}}} \mathord{\left/ {\vphantom {{{{l}_{T}}} {{{l}_{С}}}}} \right. \kern-0em} {{{l}_{С}}}}. \hfill \\ \end{gathered} \right.$(3б)
$\left\{ \begin{gathered} z{\kern 1pt} ''(x) = {{a}^{{\mathbf{r}}}} - {{b}^{{\mathbf{r}}}}x \hfill \\ z{\kern 1pt} '(x) = {{a}^{{\mathbf{r}}}}x - ({{{{b}^{{\mathbf{r}}}}} \mathord{\left/ {\vphantom {{{{b}^{{\mathbf{r}}}}} 2}} \right. \kern-0em} 2}){{x}^{2}}~ \hfill \\ z(x) = ({{{{a}^{{\mathbf{r}}}}} \mathord{\left/ {\vphantom {{{{a}^{{\mathbf{r}}}}} 2}} \right. \kern-0em} 2}){{x}^{2}} - ({{{{b}^{{\mathbf{r}}}}} \mathord{\left/ {\vphantom {{{{b}^{{\mathbf{r}}}}} 6}} \right. \kern-0em} 6}){{x}^{3}} \hfill \\ {{a}^{{\mathbf{r}}}} = {{6{{Z}^{C}}} \mathord{\left/ {\vphantom {{6{{Z}^{C}}} {{{l}_{C}}}}} \right. \kern-0em} {{{l}_{C}}}} - {{2{{Y}^{C}}} \mathord{\left/ {\vphantom {{2{{Y}^{C}}} {{{l}_{T}}}}} \right. \kern-0em} {{{l}_{T}}}} = \hfill \\ = 2\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|{{(3\lambda \sin {{\alpha }^{{\mathbf{r}}}} - \cos {{\alpha }^{{\mathbf{r}}}})} \mathord{\left/ {\vphantom {{(3\lambda \sin {{\alpha }^{{\mathbf{r}}}} - \cos {{\alpha }^{{\mathbf{r}}}})} {{{l}_{T}}}}} \right. \kern-0em} {{{l}_{T}}}} \hfill \\ {{b}^{{\mathbf{r}}}} = {{12{{Z}^{C}}} \mathord{\left/ {\vphantom {{12{{Z}^{C}}} {{{l}_{C}}}}} \right. \kern-0em} {{{l}_{C}}}} - {{6{{Y}^{C}}} \mathord{\left/ {\vphantom {{6{{Y}^{C}}} {{{l}_{T}}}}} \right. \kern-0em} {{{l}_{T}}}} = \hfill \\ = 6\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|{{(2\lambda \sin {{\alpha }^{{\mathbf{r}}}} - \cos {{\alpha }^{{\mathbf{r}}}})} \mathord{\left/ {\vphantom {{(2\lambda \sin {{\alpha }^{{\mathbf{r}}}} - \cos {{\alpha }^{{\mathbf{r}}}})} {{{l}_{T}}}}} \right. \kern-0em} {{{l}_{T}}}}, \hfill \\ \end{gathered} \right.$В (3а) aF и bF зависят от силы, а в (3б) ar и br – от смещения, но a = aF = ar и b = bF = br. Чтобы рассчитать a и b, достаточно из трех величин z, z', z'' определить две в одной точке либо одну в двух точках на консоли. Положения таких точек можно выбрать оптимальным образом.
Найдем в качестве примера две оптимальные точки определения z'' пьезорезистивным методом. Обозначив z''(x) = p, выразим параметры a и b через измеряемые величины xi и pi:
(4)
$\left\{ {\begin{array}{*{20}{c}} {{{p}_{1}} = a - b{{x}_{1}}} \\ {{{p}_{2}} = a - b{{x}_{2}}} \end{array}} \right. \to \left\{ \begin{gathered} a = {{\left( {{{x}_{2}}{{p}_{1}} - {{x}_{1}}{{p}_{2}}} \right)} \mathord{\left/ {\vphantom {{\left( {{{x}_{2}}{{p}_{1}} - {{x}_{1}}{{p}_{2}}} \right)} {\left( {{{x}_{2}} - {{x}_{1}}} \right)}}} \right. \kern-0em} {\left( {{{x}_{2}} - {{x}_{1}}} \right)}} \hfill \\ b = {{\left( {{{p}_{1}} - {{p}_{2}}} \right)} \mathord{\left/ {\vphantom {{\left( {{{p}_{1}} - {{p}_{2}}} \right)} {\left( {{{x}_{2}} - {{x}_{1}}} \right).}}} \right. \kern-0em} {\left( {{{x}_{2}} - {{x}_{1}}} \right).}} \hfill \\ \end{gathered} \right.$(5)
$\begin{gathered} M({{x}_{1}},{{x}_{2}}) = \sigma _{a}^{2}{{\cos }^{2}}\theta + \sigma _{b}^{2}{{\sin }^{2}}\theta = \\ = \left[ {\left( {(a_{{{{x}_{1}}}}^{2} + a_{{{{x}_{2}}}}^{2}){{{\cos }}^{2}}\theta + (b_{{{{x}_{1}}}}^{2} + b_{{{{x}_{2}}}}^{2}){{{\sin }}^{2}}\theta } \right) + } \right. \\ \left. { + \,\,{{k}^{2}}\left( {(a_{{{{p}_{1}}}}^{2} + a_{{{{p}_{2}}}}^{2}){{{\cos }}^{2}}\theta + (b_{{{{p}_{1}}}}^{2} + b_{{{{p}_{2}}}}^{2}){{{\sin }}^{2}}\theta } \right)} \right]\sigma _{x}^{2}, \\ a_{{{{x}_{i}}}}^{2} = {{\left( {{{da} \mathord{\left/ {\vphantom {{da} {d{{x}_{i}}}}} \right. \kern-0em} {d{{x}_{i}}}}} \right)}^{2}}\,\,\,\,{\text{и}}\,\,\,\,b_{{{{x}_{i}}}}^{2} = {{\left( {{{db} \mathord{\left/ {\vphantom {{db} {d{{x}_{i}}}}} \right. \kern-0em} {d{{x}_{i}}}}} \right)}^{2}}, \\ a_{{{{p}_{i}}}}^{2} = {{\left( {{{da} \mathord{\left/ {\vphantom {{da} {d{{p}_{i}}}}} \right. \kern-0em} {d{{p}_{i}}}}} \right)}^{2}}\,\,\,\,{\text{и}}\,\,\,\,b_{{{{p}_{i}}}}^{2} = {{\left( {{{db} \mathord{\left/ {\vphantom {{db} {d{{p}_{i}}}}} \right. \kern-0em} {d{{p}_{i}}}}} \right)}^{2}}, \\ \sigma _{{{{x}_{i}}}}^{2} = \sigma _{x}^{2}\,\,\,\,{\text{и}}\,\,\,\,\sigma _{{{{p}_{i}}}}^{2} = \sigma _{p}^{2}. \\ \end{gathered} $Из (4) и (5) получаем:
(6)
$\begin{gathered} M\left( {{{x}_{1}},{{x}_{2}}} \right) = \\ = ({{b}^{2}} + {{k}^{2}}){\kern 1pt} \left( {\frac{{(x_{2}^{2} + x_{1}^{2}){{{\cos }}^{2}}\theta + {{{\sin }}^{2}}\theta }}{{{{{({{x}_{2}} - {{x}_{1}})}}^{2}}}}} \right)\sigma _{x}^{2}. \\ \end{gathered} $(7)
$\frac{{M\left( {g,h} \right)}}{{\sigma _{x}^{2}}} = ({{b}^{2}} + {{k}^{2}})\frac{{({{g}^{2}} + {{h}^{2}}){{{\cos }}^{2}}\theta + {{{\sin }}^{2}}\theta }}{{{{h}^{2}}}}.$Стоит подчеркнуть, что приведенный выше результат строго обоснован: точнее всего коэффициенты зависимости p = a – bx определяются, если измерить p на краях отрезка [0; 1]. Благодаря этому для оптимизации пьезорезистивного метода есть универсальное решение: один пьезодатчик следует расположить там, где консоль закреплена, а другой – на свободном конце, т.е. в x2extr = 0 и x1extr = 1 (рис. 2г, 3г).
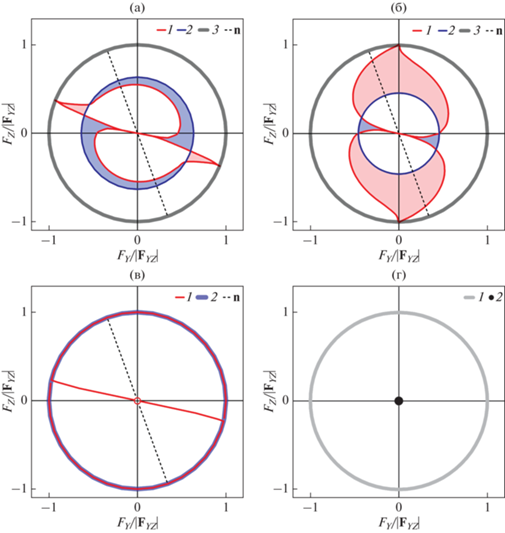
Рис. 2.
Оптимизация измерений FY, FZ: методы интерферометрии (а) и оптического рычага (б): диаграммы x2extr(αF) с CF = 0 (1); окружности x2extr ≈ 0.63 и 0.46 с 1/CF = 0 (2), x1extr = 1 (3); в – диаграмма xextr(αF) с CF = 0 (1) и окружность xextr = 1 с 1/CF = 0 (2) для комбинаций методов И + ПР, И + ОР, ОР + ПР; г – пьезорезистивный метод: окружность x1extr = 1 (1), точка x2extr = 0 (2). На (а–в) пунктирные диаметры n под углом 110° к горизонтальной оси обозначают вертикальное направление. Расчеты для прямоугольного кантилевера с λ = 0.2 проводили в Маthcad 15 (PTC, США).
В [17] для метода оптического рычага было доказано: при любых k, b, a, θ одна из координат минимума M(x1, x2) – это x1extr = 1. Это верно также для метода интерферометрии, что доказывается аналогично [17]. Вторая координата x2extr в случае методов интерферометрии и оптического рычага и координата xextr для комбинаций И + ОР, И + ПР, ОР + ПР определяется по корню полинома из табл. 1. В [17] представлен подробный аналитический вывод коэффициентов такого полинома и продемонстрировано согласие результатов расчетов для метода оптического рычага с АСМ-измерениями.
Таблица 1.
Оптимальные точки на прямоугольной консоли для измерений вектора силы взаимодействия АСМ-зонд–образец и соответствующего вектора смещения “идеального” кантилевера
| Способ измерения | Полином, по корню которого на отрезке x ∈ [0; 1] определяется положение оптимальной точки измерений на консоли |
|---|---|
| И в двух точках |
[(b – 2a)2 + 4k2]cos2θx6 + {[(b – 2a)2 + 4k2]sin2θ + b2}x5 – – 6abx4 + 2a(4a + b)x3 – 4a2x2 + 12k2x – 8k2; k = σz/σx |
| ОР в двух точках |
[k2 + (b – a)2]cos2θx4 + {[k2 + (b – a)2]sin2θ + b2}x3 – 3abx2 + + (2k2 + ab + 2a2)x – (k2 + a2); k = σz'/σx |
| И + ОР в одной точке |
ab cos2θx5 – (k2 + 4a2)cos2θx4 – 2[(k2 + a2)sin2θ – – 9k2cos2θ]x2 – 12k2sin2θ; k = σz/σx, σz' = σz |
| И + ПР в одной точке |
12ab cos2θx5 – [36a2cos2θ + k2sin2θ]x4 – 8[a2sin2θ + 9k2cos2θ]x2 – 12k2sin2θ; k = σz/σx , σz'' = σz |
| ОР + ПР в одной точке |
2ab cos2θx3 – [4(k2 + a2)cos2θ + k2sin2θ]x2 – 2(k2 + a2)sin2θ; k = σz'/σx , σz'' = σz' |
Примечание. И – метод интерферометрии, ОР – метод оптического рычага, ПР – пьезорезистивный метод.
a: = aF = 3|FYZ|(sin αF + λ cos αF)/(kClC), b: = bF = 3|FYZ| sin αF/(kClC), θ: = θF и cos2θF = 1/(2 + λ2); a: = ar = 2$\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|$(3λ sin αr – cos αr)/lT, b: = br = 6$\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|$(2λ sin αr – cos αr)/lT, θ:= θr и cos2θr = (36 + 9λ2)/(45 + 10λ2) (выражения (3а) и (3б), [17]).
На рис. 2 для различных комбинаций методов показаны угловые диаграммы оптимальных точек минимума ошибки измерений компонент F. В отличие от диаграммы x1extr(αF) = 1 форма диаграмм x2extr(αF) и xextr(αF) зависит от безразмерного параметра CF = kkClC/|FYZ| (подробно о параметре написано в [17]).
Рассмотрим на рис. 2а диаграммы метода интерферометрии. Две концентрические окружности x1extr = 1, 3, и x2extr ≈ 0.63 с C F → ∞ (кривая 2) – это изотропные диаграммы, а диаграмма x2extr(αF) (кривая 1) рассчитана для C F = 0 и анизотропна. Так как в эксперименте C F ~ 1 [17], диаграмма x2extr для оптимизации АСМ-измерений лежит в закрашенных областях между 1 и 2 и тоже будет анизотропной. Пунктирный диаметр на рис. 2а под углом αF = 110° соответствует вертикальной оси N на рис. 1а, вдоль которой реакция опоры (т.е. сила со стороны плоского образца в отсутствие трения) действует на зонд. В этом случае оптимальные измерения будут в x1extr = 1 и x2extr ∈ [0.56; 0.63] (рис. 2а, участки диаметра n в закрашенных областях между анизотропной и изотропной диаграммами 2 и 1).
Таким же путем по пересечениям диаметра n с диаграммами 2 и 1 на рис. 2б для метода оптического рычага получим более широкий диапазон x2extr ∈ [0.46; 0.88], а диаграмма для комбинаций методов (рис. 2в) в случае реакции опоры дает не зависящее от C F, фиксированное значение xextr = 1. Аналогично ищутся оптимальные точки измерений для других направлений силы.
На практике измерять вектор произвольно направленной силы удобней, имея изотропные диаграммы оптимальных точек, как на рис. 2г в пьезорезистивном методе. На рис. 2в диаграмма 2 с CF → ∞ – это окружность xextr = 1. Диаграмма с конечным CF ≥ 0 отличается от этой окружности только в двух диаметрально противоположных узких диапазонах αF шириной ≈ 0.5° (OР + ПР), 1.3° (И + ПР), 2.1° (И + ОР). Общие границы диапазонов дает условие a = 0 в (3а) (FZ = –λFY): αF ≈ ≈ –11.3° и 168.7° для λ = 0.2. На границе xextr = 1, если C F > 0, и xextr не определено, если C F = 0 (выколотая точка в центре координат на рис. 2в). Комбинации методов упорядочиваются с учетом широты угловых диапазонов, где xextr зависит от C F, и площади областей между диаграммами на рис. 2а, 2б, где от C F зависит x2extr. В итоге имеем: ПР, И + ОР, И + ПР, ОР + ПР, И, ОР.
На рис. 3 показаны диаграммы оптимизации измерений компонент вектора смещения rC “идеального” кантилевера. В соответствующих друг другу случаях на рис. 2 и 3 отличия формы диаграмм объясняются несовпадением углов αr и αF. Из выражений (3а) и (3б) следует связь между этими углами [17]:
(8)
${\text{tg}}{{\alpha }^{{\mathbf{r}}}} = {{(3\lambda + 2{\text{tg}}{{\alpha }^{{\mathbf{F}}}})} \mathord{\left/ {\vphantom {{(3\lambda + 2{\text{tg}}{{\alpha }^{{\mathbf{F}}}})} {(6{{\lambda }^{2}} + 3\lambda {\text{tg}}{{\alpha }^{{\mathbf{F}}}})}}} \right. \kern-0em} {(6{{\lambda }^{2}} + 3\lambda {\text{tg}}{{\alpha }^{{\mathbf{F}}}})}}.$Рис. 3.
Оптимизация измерений Y C, Z C: методы интерферометрии (а) и оптического рычага (б): диаграммы x2extr(αr) с C r = 0 (1); окружности x2extr ≈ 0.64 и 0.46 с 1/C r = 0 (2), x1extr = 1 (3); в – окружность xextr = 1 с 1/C r = 0 (4) и диаграммы xextr(αr) с C r = 0 для комбинаций методов: ОР + ПР (1), И + ПР (2), И + ОР (3); г – метод ПР: окружность x1extr = 1 (1), точка x2extr = 0 (2). На (а)–(в) пунктирные диаметры s под углом ≈ 74° к горизонтальной оси обозначают направление скольжения зонда; Cr = ${{k{{l}_{T}}} \mathord{\left/ {\vphantom {{k{{l}_{T}}} {\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|}}} \right. \kern-0em} {\left| {{\mathbf{r}}_{{YZ}}^{C}} \right|}}.$

Диаграммы с конечным C r ≥ 0 будут отличаться от окружности xextr = 1 с C r → ∞ (рис. 3в) в диаметрально противоположных диапазонах углов αr: ≈ 7° (OР + ПР), ≈ 23° (И + ПР), ≈ 117° (И + ОР). Общие границы диапазонов дает условие a = 0 в системе (3б): αr ≈ 59° и ≈ 239° для λ = 0.2. Эти диапазоны шире своих аналогов, рассмотренных при обсуждении рис. 2в, но три пары методов упорядочиваются так же, как в случае измерений вектора силы.
ЗАКЛЮЧЕНИЕ
Комбинируя методы пьезорезистивный, оптического рычага и интерферерометрии попарно в одной точке либо любой из них в двух точках на консоли, можно измерять компоненты силы взаимодействия АСМ-зонд–образец в плоскости изгиба консоли, а в трех комбинациях с методом оптического рычага – вектор силы целиком. В пяти комбинациях методов, соответствующих минимуму ошибки измерений, оптимальные положения таких точек меняются c направлением силы и, соответственно, смещением “идеального” кантилевера с “недеформируемым” зондом [17, 20]. Можно выстроить эти комбинации по возрастанию изменчивости положений оптимальных точек: И + ОР, И + ПР, ОР + ПР, И, ОР. У пьезорезистивного метода оптимальные точки, не зависящие от амплитуды и направления как приложенной к зонду силы, так и смещения “идеального” кантилевера, зафиксированы в месте крепления и на свободном конце консоли. Однако по сравнению с пьезорезистивным методом, методы оптического рычага и интерферометрии чувствительны к меньшим силам [13]. Поэтому при реализации измерений в АСМ векторов силы и смещения зонда выбор может быть сделан в пользу комбинаций И + ОР в одной точке [21] и оптического рычага в двух точках [16, 17].
Список литературы
Binnig G., Quate C.F., Gerber C. // Phys. Rev. Lett. 1986. V. 56. № 9. P. 930.https://doi.org/10.1103/PhysRevLett.56.930
Миронов В.Л. Основы сканирующей зондовой микроскопии. М.: Техносфера, 2005. 144 с.
Bolopion A., Xie H., Haliyo D.S., Régnier S. // IEEE/ASME Transac. Mechatronics. 2012. V. 17. № 1. P. 116.https://doi.org/10.1109/TMECH.2010.2090892
Няпшаев И.А., Анкудинов А.В., Стовпяга А.В., Трофимова Е.Ю., Еропкин М.Ю. // ЖТФ. 2012. Т. 82. № 10. С. 109.
Dai G., Hahm K., Scholze F., Henn M.-A., Gross H., Fluegge J., Bosse H. // Meas. Sci. Technol. 2014. V. 25. P. 044002.https://doi.org/10.1088/0957-0233/25/4/044002
Soergel E. // J. Phys. D. 2011. V. 44. P. 464003.https://doi.org/10.1088/0022-3727/44/46/464003
Alikin D.O., Gimadeeva L.V., Ankudinov A.V., Hu Q., Shur V.Ya., Kholkin A.L. // Appl. Surf. Sci. 2021. V. 543. P. 148808.https://doi.org/10.1016/j.apsusc.2020.148808
Kis A. Mechanical Properties of Mesoscopic Objects, Thesis. Lausanne: EPFL, 2003. 166 p.
Ankudinov A.V. // Semiconductors. 2019. V. 53. № 14. P. 1891.https://doi.org/10.1134/S1063782619140021
Khalisov M.M., Lebedev V.A., Poluboyarinov A.S., Garshev A.V., Khrapova E.K., Krasilin A.A., Ankudinov A.V. // Nanosyst. Phys. Chem. Math. 2021. V. 12. № 1. P. 118.https://doi.org/10.17586/2220-8054-2021-12-1-118-127
Tortonose M., Barrett R.C., Quate C.F. // Appl. Phys. Lett. 1993. V. 62. № 8. P. 834.https://doi.org/10.1063/1.108593
Thaysen J., Boisen A., Hansen O., Bouwstra S. // Sensors and Actuators A. 2000. V. 83. № 1–3. P. 47.https://doi.org/10.1016/S0924-4247(00)00299-5
Nanotribology and Nanomechanics. An Introduction. / Ed. Bhushan B. Berlin–Heidelberg: Springer-Verlag, 2008. 1516 p. https://doi.org/10.1007/978-3-540-77608-6
Alexander S., Hellemans L., Marti O., Schneir J., Elings V., Hansma P.K.J. // J. Appl. Phys. 1989. V. 65. № 1. P. 164.https://doi.org/10.1063/1.342563
Rugar D., Mamin H.J., Guethner P. // Appl. Phys. Lett. 1989. V. 55. № 25. P. 2588.https://doi.org/10.1063/1.101987
Mrinalini R.S.M., Sriramshankar R., Jayanth G.R. // IEEE/ASME Transac. Mechatronics. 2015. V. 20. № 5. P. 2184. https://doi.org/10.1109/TMECH.2014.2366794
Анкудинов А.В., Минарский А.М. // ЖТФ. 2021. Т. 91. № 6. С. 1045.https://doi.org/10.21883/JTF.2021.06.50877.303-20
Sarid D. Exploring Scanning Probe Microscopy with Mathematica. Weinheim: WILEY–VCH Verlag GmbH & Co, 2007. 310 p.
Landau L.D., Lifshitz E.M. Theory of Elasticity. Oxford: Pergamon Press Ltd., 1970. 165 p.
Ankudinov A.V. // Nanosystems: Phys., Chem., Math. 2019. V. 10. № 6. P. 642.https://doi.org/10.17586/2220-8054-2019-10-6-642-653
Labuda A., Proksch R. // Appl. Phys. Lett. 2015. V. 106. № 25. P. 253103.https://doi.org/10.1063/1.4922210
Дополнительные материалы отсутствуют.
Инструменты
Поверхность. Рентгеновские, синхротронные и нейтронные исследования