

Приборы и техника эксперимента, 2022, № 3, стр. 29-33
Разработка и испытания устройства для регулирования и стабилизации мощного излучения миллиметрового диапазона
М. В. Каменский a, *, М. А. Кошелев a, А. А. Орловский a, b, А. С. Седов a, С. А. Скороходов c, А. И. Цветков a, b
a Институт прикладной физики РАН
603950 Нижний Новгород, ул. Ульянова, 46, Россия
b Волжский государственный университет водного транспорта
603950 Нижний Новгород, ул. Нестерова, 5, Россия
c Институт прикладной физики РАН, Научное объединение “Школа юного исследователя”
603950 Нижний Новгород, ул. Ульянова, 46, Россия
* E-mail: mkamenskiy@ipfran.ru
Поступила в редакцию 10.12.2021
После доработки 22.12.2021
Принята к публикации 24.12.2021
- EDN: WYYXLC
- DOI: 10.31857/S0032816222030089
Аннотация
Приведены результаты разработки и экспериментальной реализации устройства для управления параметрами мощного микроволнового излучения, принцип действия которого основан на управляемом повороте поляризационной пластины в плоскости, перпендикулярной оси распространения линейно поляризованного микроволнового пучка. Экспериментально продемонстрирована стабилизация мощности субтерагерцового гиротрона на уровне нескольких процентов в широком диапазоне перестройки управляющих параметров. Разработанное устройство может быть успешно применено для решения целого ряда задач, направленных на исследование взаимодействия мощного микроволнового излучения с веществом.
ВВЕДЕНИЕ
В настоящее время электромагнитное излучение терагерцового диапазона все более широко применяется в различных физических, технологических, химических и биологических задачах, в том числе для диагностики и исследований взаимодействия с различными средами [1–3]. Современные гиротроны способны обеспечить очень высокий (сотни ватт на частотах до 1 ТГц) уровень выходной мощности, что делает их весьма привлекательными приборами в данном диапазоне частот [4–6]. При этом часть из упомянутых выше задач предъявляет дополнительные требования к режимам работы гиротронных комплексов. В частности, для успешного и точного проведения исследований по микроволновой спектроскопии высокого разрешения [7] необходимо обеспечить стабилизацию выходной мощности при перестройке управляющих параметров (тока и ускоряющего напряжения электронного пучка, магнитного поля основного соленоида и катодной катушки, температуры охлаждающей резонатор жидкости и т.д.) [8]. Основная проблема состоит в том, что при перестройке данных параметров одновременно меняются как выходная частота, так и мощность гиротрона [9]. Стабилизацию мощности при этом возможно обеспечить, в том числе, используя систему обратной связи и соответствующие устройства. В данной работе описан созданный на данном принципе автоматизированный прибор для стабилизации мощности микроволнового излучения на основе поляризатора и приводятся результаты экспериментов.
ОПИСАНИЕ ЭКСПЕРИМЕНТАЛЬНОЙ УСТАНОВКИ
В качестве источника излучения использовался автоматизированный гиротронный комплекс, разработанный и изготовленный в Институте прикладной физики РАН (Нижний Новгород, Россия) совместно с ЗАО НПП ГИКОМ (Нижний Новгород, Россия). На данном комплексе в настоящее время проводятся испытания и исследования ряда непрерывных и импульсных гиротронов. Описываемый прибор был апробирован на двух из них: на гиротроне, работающем на основной циклотронной гармонике с частотой 0.26 ТГц и максимальной выходной мощностью 1 кВт (рабочая мода TE53) [10], и на гиротроне, работающем на второй циклотронной гармонике с частотой 0.53 ТГц с максимальной выходной мощностью 240 Вт (рабочая мода TE65) [11]. Каждый из гиротронов имеет свой собственный встроенный высокоэффективный квазиоптический преобразователь рабочей моды в узкий выходной волновой пучок гауссова типа. В такой конструкции гиротрона отраженное излучение рассеивается при проходе квазиоптического преобразователя в обратном направлении, что, в числе прочего, предотвращает влияние отраженного от поляризатора сигнала на режим работы гиротрона.
КОНСТРУКЦИЯ АТТЕНЮАТОРА
Поскольку выходное излучение гиротрона, формируемое квазиоптическим преобразователем [12], является линейно поляризованным, прибор для управления и стабилизации мощности (аттенюатор) может быть реализован на основе поляризатора. Конструкция поляризатора представляет собой натянутые на равном расстоянии, параллельные, тонкие по сравнению с используемыми длинами волн, металлические проволочки, выполненные из вольфрама, являющегося тугоплавким материалом.
Часть экспериментов проводилась при мощности падающей на поляризатор волны порядка нескольких сотен ватт с шириной пучка 1.5–2 см в непрерывном режиме. При таком уровне мощности не наблюдалось разрушения или деформации элементов поляризатора или существенного увеличения его температуры. Также в предварительных экспериментах была измерена проходящая через поляризатор мощность излучения в зависимости от угла поворота поляризатора. Минимальное значение данной мощности находилось в пределах погрешности калориметра, что свидетельствовало о правильной работе поляризатора. Максимальное же значение прошедшей мощности отличалось от исходного также на величину порядка погрешности измерений, что позволило в дальнейших оценках пренебречь поглощенным в поляризаторе излучением. Поворотом пластины в плоскости, перпендикулярной оси распространения пучка, можно плавно регулировать проходящую через поляризатор мощность излучения.
Используемый в данной работе аттенюатор для управления мощностью излучения состоит из нескольких основных конструктивных и программных элементов: корпуса с поворотным механизмом и поляризатором, датчика сверхвысокочастотного (с.в.ч.) излучения и запрограммированного микропроцессорного блока. Функциональная схема устройства представлена на рис. 1.

Корпус устройства (рис. 2а) представляет собой прямоугольный параллелепипед размером 130 × 165 × 140 мм, состоящий из трех пластиковых панелей с большими центральными отверстиями, четырех металлических винтовых шпилек, вала (металлической трубки) и двух пластиковых шестерней, закрепленных между пластиковыми панелями корпуса. Габариты корпуса в первую очередь определяются размерами поляризатора и устойчивостью конструкции. Шаговый двигатель закреплен на одной из панелей устройства.

Работа устройства заключается в следующем. Вращение вала шагового двигателя приводит в движение основной вал устройства, который вращает малую шестерню. Поворот последней приводит в движение большую шестерню, внутри которой находится поляризатор. В результате меняется угол наклона поляризатора, что позволяет регулировать проходящую через него линейно поляризованную мощность излучения гиротрона. Пластиковые элементы устройства (пластины и шестерни) смоделированы и изготовлены с помощью аддитивных технологий с учетом габаритов поляризатора.
Управление устройством и его настройка, как и связь с компьютером, осуществлялись с помощью блока управления (рис. 2б), который содержит плату с микропроцессом, плату с драйвером шагового двигателя и плату расширения для удобного подключения светодиодной индикации и другой периферии. Электропитание устройства осуществлялось с помощью блока питания 12 В постоянного напряжения.
Ядром блока управления являлась платформа Arduino Mega 2560 R3, построенная на основе восьмибитного микроконтроллера семейства AVR – ATmega2560, работающего на частоте 16 МГц и имеющего 8 Кбайт оперативной памяти.
РЕАЛИЗАЦИЯ ПРОГРАММНОЙ ЧАСТИ УПРАВЛЕНИЯ ПОЛЯРИЗАТОРОМ
Разработанная для данного прибора программа позволяла измерять уровень сигнала с датчика с.в.ч.-излучения, обрабатывать поступающие данные на основе алгоритма пропорционально-интегрально-дифференцирующего (п.и.д.) регулятора [13] и выдавать управляющий сигнал на драйвер шагового двигателя для поворота поляризатора в определенном направлении. Также устройство обеспечивало управление скоростью и направлением вращения поляризатора в ручном режиме с помощью пульта дистанционного управления. Код программы давал возможность в любой момент перезаписать значение уровня сигнала, относительно которого будет осуществляться стабилизация, и включить или выключить режим автоматической работы устройства. Все функции устройства можно было активировать с помощью пульта дистанционного управления и видеть статус их работы с помощью светодиодной индикации.
Микроволновое излучение, попавшее на датчик с.в.ч.-излучения, усиливалось и попадало на вход 16-битного аналого-цифрового преобразователя, где оно обрабатывалось и по протоколу I2C отправлялось на микропроцессорный блок. Полученные данные с помощью программы сглаживались фильтром “скользящее среднее”, после чего обрабатывались с использованием алгоритма п.и.д.-регулятора с обратной связью. В ходе этого процесса вычислялись сигнал рассогласования или ошибка (e(t)) и его дифференциальная и интегральная составляющие. Затем эти компоненты умножались на экспериментально подобранные коэффициенты (Kp, Ki, Kd) и суммировались. Полученная сумма и являлась значением управляющего сигнала (u(t)):
(1)
$u\left( t \right) = P + I + D = {{K}_{p}}e\left( t \right) + {{K}_{i}}\mathop \smallint \limits_0^t e\left( t \right)~dt + {{K}_{d}}\frac{{de}}{{dt}}~.$Диапазон значений управляющего сигнала ограничивался программно.
Общее время одного цикла измерений, вычислений и обработки данных занимало около 10 мс.
Далее управляющий сигнал поступал на драйвер шагового двигателя, который производил необходимое количество шагов в нужную сторону. Это непосредственно влияло на положение поляризатора, т.е. на его угол наклона относительно плоскости поляризации. Поворот поляризатора, в свою очередь, позволял стабилизировать мощность излучения, попадающего на датчик и калориметр. Один шаг двигателя осуществлялся за 50 мкс. Стоит отметить, что целесообразно перед началом измерений установить поляризатор в промежуточное положение с углом наклона 45° относительно плоскости поляризации. Такое положение позволяет как увеличивать, так и уменьшать проходящую мощность при повороте поляризатора
Выведение поляризатора в исходное положение и ограничение угла поворота (на основе счетчика количество шагов), не допускающее превышение заданного, были реализованы программно. Программа также позволяла в любой момент перезаписать значение заданного уровня мощности, относительно которого будет осуществляться регулировка.
ПОРЯДОК ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА
Общая схема эксперимента приведена на рис. 3. Выходное излучение гиротрона попадало на разветвитель, и основная его часть (порядка 90%) транспортировалась в калориметр, при этом рассчитанный уровень мощности составлял порядка нескольких сотен ватт. Это позволяло обеспечить безопасность оборудования и персонала при проведении экспериментов, поскольку используемая в данных демонстрационных экспериментах конструкция прибора не была оснащена экранировкой либо каким-то защитным кожухом.
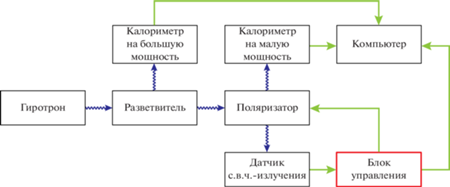
Остальное излучение (порядка 10%) проходило через поляризатор, и часть его попадала в калориметр, рассчитанный на малую мощность [14], а часть – на расположенный рядом датчик с.в.ч.-излучения. Использованный здесь калориметр разработан в ИПФ РАН на основе двух высокоточных датчиков температуры, расходомера, рассчитанного на крайне малый проток жидкости, и микропроцессорного блока. Датчики температуры интегрированы в пластиковый корпус специальной формы, изготовленный с использованием технологий фотополимерной 3D-печати. Архитектура корпуса калориметра способствует максимальному поглощению излучения гиротрона, что в совокупности с рядом других преимуществ позволяет достичь высокой чувствительности и точности измерений малых мощностей излучения.
Данные с обоих калориметров передавались на компьютер. Излучение, поступившее на датчик, расположенный за поляризатором и включенный в петлю обратной связи, преобразовывалось в цифровой сигнал (прямые зеленые линии), который передавался на блок управления положением поляризатора. Данные блока управления также поступали в компьютер.
ЭКСПЕРИМЕНТАЛЬНЫЕ РЕЗУЛЬТАТЫ
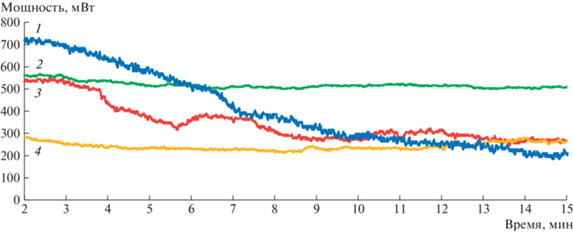
На рис. 4 приведены графики измерения мощности калориметром. Средняя мощность излучения в экспериментах составляла несколько сотен милливатт. Кривой 1 показаны результаты контрольного измерения без поляризатора. Видно достаточно плавное изменение мощности со временем, что связано с плавным изменением температуры охлаждающей жидкости и, как следствие, с изменением поперечных размеров резонатора, приводящим к изменению частоты. Кривыми 2–4 показаны графики измерения мощности калориметром с поляризатором и включенной системой п.и.д.-регулировки при различных значениях коэффициента п.и.д.-регулятора и небольшом изменении положения калориметра относительно траектории пролета волнового пучка. Наилучший уровень стабилизации соответствует кривой 2, в данном режиме мощность излучения была стабилизирована на уровне порядка 9%, что удовлетворяет требованиям многих возможных приложений
ЗАКЛЮЧЕНИЕ
Разработанное устройство стабилизации мощности микроволнового излучения на основе поляризатора было протестировано с помощью субтерагерцового гиротронного стенда. Продемонстрировано, что выходное излучение гиротрона стабилизировано с приемлемой для спектроскопических задач точностью. Описанное устройство может быть эффективно использовано и в других задачах, которые требуют управления параметрами мощного микроволнового излучения.
Список литературы
Handbook of Terahertz Technologies: Devices and Applications / Eds. Song Ho-Jin, Tadao Nagatsuma. Pan Stanford Publishing Pte. Ltd., 2015.
Booske J.H., Dobbs R.J., Joye C.D., Kory C.L., Neil G.R., Park G.-S., Park J., Temkin R.J. // IEEE Trans. Terahertz Sci. Technol. 2011. V. 1. Issue 1. P. 54. https://doi.org/10.1109/TTHZ.2011.2151610
Blank M., Rosay M., Engelke F.J. // Magn. Reson. 2016. V. 264. P. 88. https://doi.org/10.1016/j.jmr.2015.12.026
Litvak A.G., Denisov G.G., Glyavin M.Yu. // IEEE Journal of Microwaves. 2021. V. 1. Issue 1. P. 260. https://doi.org/10.1109/JMW.2020.3030917
Idehara T., Sabchevski S., Glyavin M., Mitsudo S. // Appl. Sci. 2020. V. 10. Issue 3. P. 980. https://doi.org/10.3390/app10030980
Sabchevski S., Glyavin M., Mitsudo S., Tatematsu Y., Idehara T. // J. Infrared Milli Terahz Waves. 2021. V. 42. Issue 7. P. 715. https://doi.org/10.1007/s10762-021-00804-8
Golubiatnikov G.Y., Koshelev M.A., Tsvetkov A.I., Fokin A.P., Glyavin M.Y., Tretyakov M.Y. // IEEE Transactions on Terahertz Science and Technology. 2020. V. 10. Issue 5. P. 502. https://doi.org/10.1109/TTHZ.2020.2984459
Fokin A.P., Tsvetkov A.I., Manuilov V.N., Sedov A.S., Bozhkov V.G., Genneberg V.A., Movshevich B.Z., Glya-vin M.Yu. // Rev. of Scientific Instrum. 2019. V. 90. Issue 12. P. 124705. https://doi.org/10.1063/1.5132831
Bogdashov A.A., Denisov G.G., Fokin A.P., Glyavin M.Yu., Novozhilova Yu.V., Sedov A.S., Tsvetkov A.I. // EPJ Web Conf. 10th International Workshop 2017 “Strong Microwaves and Terahertz Waves: Sources and Applications”. Nizhny Novgorod, Russia, July 17–22. 2017. V. 149.
Glyavin M.Yu., Chirkov A.V., Denisov G.G., Fokin A.P., Kholoptsev V.V., Kuftin A.N., Luchinin A.G., Golubyatnikov G.Yu., Malygin V.I., Morozkin M.V., Manuilov V.N., Proyavin M.D., Sedov A.S., Sokolov E.V., Tai E.M., Tsvetkov A.I., Zapevalov V.E. // Rev. Sci. Instrum. 2015. V. 86. Issue 5. P. 054705. https://doi.org/10.1063/1.4921322
Glyavin M.Yu., Kuftin A.N., Morozkin M.V., Proyavin M.D., Fokin A.P., Chirkov A.V., Manuilov V.N., Sedov A.S., Soluyanova E.A., Sobolev D.I., Tai E.M., Tsvetkov A.I., Luchinin A.G., Kornishin S.Yu., Denisov G.G. // IEEE Electron Device Lett. 2021. V. 42. № 11. P. 1666. https://doi.org/10.1109/LED.2021.3113022
Bogdashov A.A., Chirkov A.V., Denisov G.G., Vinogradov D.V., Kuftin A.N., Malygin V.I., Zapevalov V.E. // International Journal of Infrared and Millimeter Waves. 1995. V. 16. Issue 4. P. 735. https://doi.org/10.1007/BF02066633
Astrom K., Hagglund T. PID Controllers: Theory, Design, and Tuning, 2nd Edition, Instrument Society of America. NC, USA, Research Triangle Park, 1995.
Denisov G.G., Glyavin M.Yu., Kuftin A.N., Proyavin M.D., Morozkin M.V., Sobolev D.I., Fokin A.P., Tai E.M., Rodin Yu.V., Luchinin A.G., Manuilov V.N. // The twenty-second International Vacuum Electronics Conference IVEC 2021. 27–30 April 2021, Virtual Event.
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента