

Приборы и техника эксперимента, 2022, № 3, стр. 21-28
ЛАЗЕРНЫЙ СТЕНД ДЛЯ ТЕСТИРОВАНИЯ КРЕМНИЕВЫХ МИКРОСТРИПОВЫХ ДЕТЕКТОРОВ
П. И. Харламов a, b, *, М. О. Шитенков b, Д. В. Дементьев b, В. В. Леонтьев a, b, М. М. Меркин a, b
a НИИ ядерной физики им. Д.В. Скобельцына Московского государственного университета им. М.В. Ломоносова
119991 Москва, Ленинские горы, 1, строение 2б, Россия
b Объединенный институт ядерных исследований, Лаборатория физики высоких энергий
им. В.И. Векслера и А.М. Балдина
141980 Дубна, Московской обл., ул. Жолио-Кюри, 6, Россия
* E-mail: pi.kharlamov@physics.msu.ru
Поступила в редакцию 19.01.2022
После доработки 30.01.2022
Принята к публикации 01.02.2022
- EDN: DGNDVW
- DOI: 10.31857/S003281622204005X
Аннотация
Описана установка для проведения поканального тестирования и калибровки микростриповых кремниевых детекторов при помощи коллимированных лазерных импульсов. Особенностью установки является использование инфракрасного лазерного диода для имитации сигнала от прохождения заряженной частицы через вещество детектора. Система линз позволяет получить поперечный размер пучка до 50 мкм, что в совокупности с использованием прецизионного шагового двигателя позволяет проводить тестирование каждого канала детектора в автоматическом режиме. Продемонстрирована работа системы на модулях кремниевой трековой системы BM@N.
ВВЕДЕНИЕ
Кремниевые координатно-чувствительные сенсоры широко используются для создания трековых систем физических установок в области физики высоких энергий. Применение данных детекторов обусловлено, в первую очередь, высокой гранулярностью и пространственным разрешением, которое может достигать 5 мкм, например, в монолитных активных пиксельных сенсорах ALPIDE, применяемых в эксперименте ALICE [1]. Наряду с пиксельными сенсорами, в ряде современных экспериментов используются двусторонние микростриповые детекторы. В качестве примеров таких экспериментов можно привести CBM@FAIR [2], BM@N [3]. Координатное разрешение микростриповых детекторов не уступает пиксельным и может составлять несколько микрометров в случае аналогового съема сигнала. При этом кремниевые сенсоры данного типа обладают большей радиационной стойкостью. Так, например, микростриповые детекторы, которые планируется использовать в экспериментах BM@N и CBM@FAIR, способны сохранять работоспособность при поглощенных дозах излучения свыше 1014 1-МэВ нейтронных эквивалентов/см2 [4]. Наиболее полно особенности кремниевых детекторов описаны в [5].
Высокая гранулярность кремниевых координатно-чувствительных детекторов требует большого количества каналов считывающей электроники, а также сложной архитектуры системы сбора данных с каналов детектора. Из-за высокой плотности каналов зачастую необходимо использование технологии ультразвуковой микросварки, применяемой для монтажа бескорпусной микроэлектроники. Все это делает процедуру сборки кремниевых детекторных модулей сложной и дорогостоящей процедурой. Поэтому, для того чтобы убедиться в качестве детекторных модулей перед установкой трековых систем, необходимо проводить процедуру тестирования и сертификации компонентов и готовых изделий.
Процедура сертификации детекторных модулей включает в себя как функциональные тесты, необходимые для определения работоспособности устройства, так и долговременные тесты в условиях периодических перезагрузок питания и термоциклирования. Для проведения ряда испытаний необходим источник для генерации сигналов детектора. В качестве такого источника могут использоваться радиоактивные источники, выведенные пучки ускоренных заряженных частиц, а также лазерные импульсы. Лазерный стенд имеет ряд существенных преимуществ перед другими методами. В отличие от радионуклидов, где излучение носит стохастический характер, параметры лазерного импульса можно регулировать, что особенно важно для настройки электроники считывания детектора. Кроме того, оборудование для лазерного стенда стоит относительно недорого и может применяться для серийного тестирования, в отличие от сложных в обслуживании и дорогостоящих ускорителей частиц.
Основной задачей данной работы являлось создание лазерного стенда для тестирования детекторных модулей на основе кремниевых сенсоров. Стенд был оптимизирован для задач тестирования модулей кремниевой трековой системы (к.т.с.) BM@N, а также для отладки электроники считывания данной системы.
Модуль к.т.с. BM@N описан в [6, 7]. Основным компонентом модуля является двусторонний микростриповый кремниевый сенсор с шириной стрипа 58 мкм, общее количество стрипов на каждой стороне сенсора составляет 1024. Считывающая электроника модуля включает в себя восемь бескорпусных специализированных интегральных микросхем (с.и.м.с.) STS-XYTER [8], установленных на специализированной плате, для чтения каждой из сторон сенсора. Считывающая электроника соединяется с сенсором при помощи специализированного сверхлегкого алюминиевого кабеля на полиамидной основе с шириной сигнальной линии 100 мкм [6]. Длина кабеля при этом может составлять до 30 см.
Принцип работы стенда состоит в имитации при помощи лазерного излучения прохождения ионизирующей частицы через кремниевый сенсор детекторного модуля. Основной задачей стенда является проведение пострипового сканирования сенсора лазерными импульсами с целью определения неработающих каналов. Причиной появления неработающего канала при этом может быть, как отсутствие электрического контакта между стрипом сенсора и входом считывающего канала с.и.м.с., так и неработающий тракт микросхемы. Отдельной задачей ставилось определение возможности использования лазерного стенда для калибровки аналого-цифровых преобразователей каналов с.и.м.с., а также определение разброса коэффициентов усиления каналов чтения.
УСТРОЙСТВО СТЕНДА
Основные составляющие части стенда следующие: оптическая система с закрепленным лазерным светодиодом, система позиционирования тестируемого модуля, а также система чтения и управления трековым модулем. Компоненты стенда, помещенные в светозащитный экранирующий кожух, имеющий внутреннее черное матовое покрытие, показаны на рис. 1.
Рис. 1.
Фотография компонентов стенда внутри экранирующего кожуха. 1 – фокусирующая головка; 2 – выход светового излучения от диода из оптоволоконного кабеля; 3 – аттенюатор; 4 – микроскоп для настройки; 5 – исследуемый детектор и электроника в лабораторной оснастке; 6 – стол с креплениями; 7 – двигатель; 8 – концевые датчики.
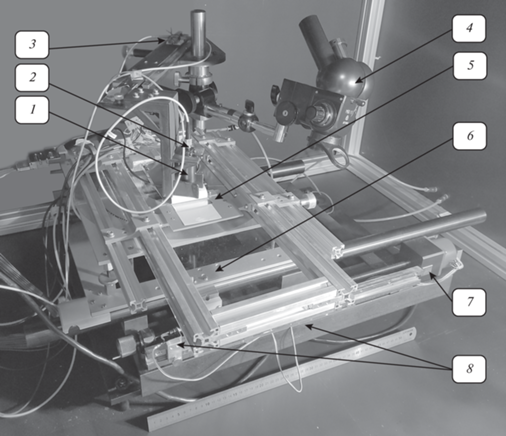
Фокусирующая головка 1 формирует пятно света, приходящего по оптическому волокну 2 от лазерного светодиода через переменный аттенюатор 3. В качестве фокусирующей головки используется конденсор PS-2 “СоларЛС”, который может фокусировать свет из оптоволоконной линии в пятно диаметром 50 мкм (полная энергия) и имеет фокусное расстояние 4 см. Аттенюаторы VOA630-FC и VOA1064-FC фирмы “Thorlabs” обеспечивают ослабление до 50 дБ.
В качестве лазерных светодиодов использовались светодиоды “Нолатех” двух видов, оба мощностью 1 мВт. Диод марки FPL-1064-14BF-1 генерирует инфракрасный свет с длиной волны 1064 нм и глубиной проникновения в кремний 1040 мкм, что позволяет наиболее полным образом воспроизвести прохождение минимально ионизирующих частиц через исследуемые детекторы c типичной толщиной 300 мкм. Диод марки FPL-635-14BF-1 генерирует красный свет с длиной волны 635 нм, а глубина его проникновения в кремний – 3.17 мкм [9]. Преимуществом диода данного вида является удобство использования видимого глазом света для настройки работы стенда при помощи микроскопа 4.
Источник питания диода размещен снаружи кожуха, в качестве источника задействован генератор сигналов, управляемый через персональный компьютер по локальной сети Ethernet. Генератор Tektronix AFG3052C может обеспечивать последовательности прямоугольных импульсов длиной от 12 нс с временами нарастания и спада сигнала 7 нс в широком диапазоне амплитуд и частот. Таким образом, можно создавать импульсы длительностью, сопоставимой с типичным временем сбора заряда в сенсоре ~20 нс.
Каждый исследуемый полупроводниковый детектор с электроникой считывания размещен в индивидуальной лабораторной оснастке 5.
На рис. 1 также отображены следующие компоненты системы позиционирования: координатный стол 6 с креплениями для детекторного модуля; шаговый двигатель ДШИ-200-2 (7) с валом для перемещения координатного стола; пара концевых выключателей 8. Также в эту систему входят управляющий блок (драйвер) двигателя, подключенный к последовательному порту персонального компьютера через концентратор последовательных портов RS-232, и источник питания двигателя, они размещаются снаружи кожуха. Программное управление системой позиционирования написано на высокоуровневом языке программирования Python на основе библиотеки pyserial. Драйвер управляет питанием обмоток двигателя с помощью логических ключей и схем сдвига уровней. Движение координатного стола ограничивается концевыми выключателями 8, информация об их состоянии также передается через последовательный порт.
Считывающая электроника, используемая для чтения сигналов с модуля к.т.с. BM@N, описана в [10, 11].
ВОЗМОЖНОСТИ СТЕНДА
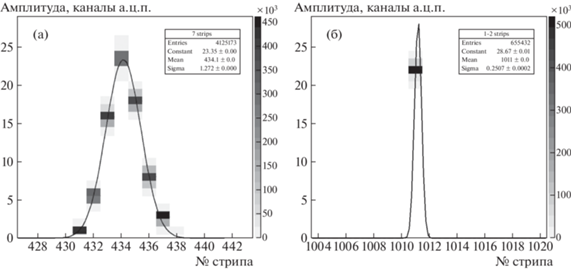
Одним из ключевых параметров стенда является размер лазерного пятна в области регистрации. Под этим понятием мы понимаем радиус окружности, равный среднеквадратическому отклонению распределения зарегистрированной энергии от номера стрипа, которое имеет вид нормального распределения. Минимальный диаметр пучка не должен превышать ширину зоны между соседними стрипами, которая свободна от металлизации. Металлизация наносится на каждый стрип для создания электрического поля, необходимого для сбора выделившегося заряда в веществе детектора. При попадании лазерного излучения на области металлизации происходит отражение, как показано, например, в статье [12]. Для сенсоров к.т.с. BM@N ширина свободной от металлизации зоны на поверхности сенсора составляет 38 мкм, поэтому минимальный размер пятна нашего стенда равен 50 мкм. Однако в ряде случаев, когда, например, требуется имитировать события с большим кластером сработавших стрипов, размер лазерного пятна нужно увеличить. Этого эффекта можно добиться использованием расфокусированного пучка.
На рис. 2а отображено распределение амплитуд сигналов на одной из сторон сенсора в случае использования расфокусированного красного лазера. Уширение сигнала в кремниевом сенсоре возникает, в первую очередь, из-за перетекания заряда на соседние стрипы за счет паразитной емкости как самих стрипов, так и используемого кабеля для передачи сигналов от детектора к считывающей электронике и, во вторую очередь, из-за диффузии носителей заряда, эффект которой в нашем случае невелик по причине полного обеднения сенсора и высокой скорости сбора заряда. Для пострипового сканирования использовалось сфокусированное пятно лазера размером 50 мкм (рис. 2б).
Рис. 2.
Распределение амплитуд сигналов относительно порядковых номеров сработавших стрипов для p-стороны: а – для ширины пятна лазера 7 стрипов, б – 1 стрип.
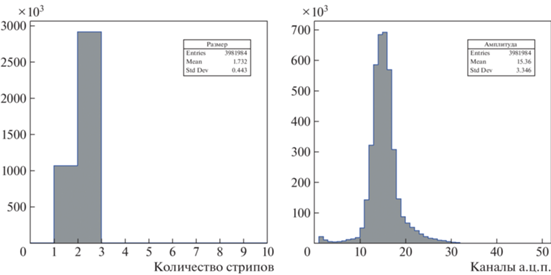
Свободные носители заряда, образующиеся при взаимодействии фотонов лазерного излучения с кремнием, делятся, как правило, между несколькими соседними стрипами. Группу стрипов, сработавших от одного лазерного импульса, принято называть кластером. На рис. 3 представлен восстановленный кластер одновременно сработавших каналов (хитов) на одной стороне сенсора – количество стрипов в нем и распределение суммарных амплитуд сигналов. Процедура определения кластеров используется для восстановления координат попадания частиц в сенсор и подсчета ее суммарных энергетических потерь. Для включения хита в кластер применяются два критерия: 1) одновременность срабатывания (±20 нс); 2) локальность (хит должен находиться не более чем в 5 стрипах от центра рассматриваемого кластера).
Рис. 3.
Распределение размера восстановленного кластера сработавших стрипов (слева) и суммарная амплитуда кластера (справа).
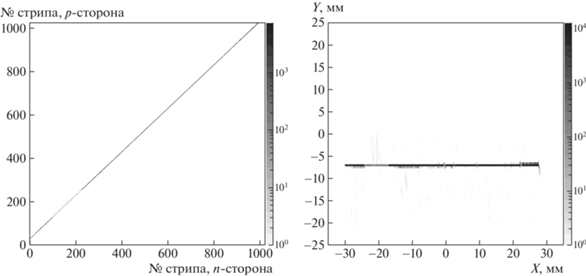
Пример пострипового сканирования сенсора показан на рис. 4. Так как угол между стрипами на разных сторонах сенсора (в проекции на плоскость сенсора) составляет 7.5°, это позволяет проводить тестирование стрипов на обеих сторонах сенсора при перемещении вдоль одной координаты.
Рис. 4.
Сканирование пучком вдоль поверхности сенсора: слева – отношение номеров сработавших стрипов на n- и p‑стороне; справа – вертикальные и горизонтальные координаты пятна.
Нами было проведено сравнение двух вариантов режима работы шагового двигателя, перемещающего координатный стол с модулем относительно фокусирующей головки лазера: режим полного шага, соответствующий перемещению на 20 мкм, и четверти шага – на 5 мкм. Поскольку шаг стрипов кремниевого сенсора составляет 58 мкм, то при сканировании модуля лазерным излучением (для попадания луча между поверхностной металлизацией стрипов) необходимо вносить поправки в ход координатного стола. Например, в случае режима полного шага процедура перемещения между соседними стрипами состоит из трех шагов (60 мкм), при этом каждый 15-й шаг пропускается из-за необходимости компенсации отклонения положения фокусирующей головки лазера. Тем не менее, из-за несовпадения дискретности движения лазера и ширины стрипа при сканировании всех 1024 каналов сенсора возникает картина систематического смещения лазерного пятна как в зону металлизации, так и в пограничную зону между соседними стрипами. Результатом является “пилообразное” распределение амплитуд сигнала (рис. 5а), вызванное как систематическим отражением части лазерного импульса, так и делением заряда между соседними стрипами в разном соотношении. В случае использования режима четверти шага – более сложного и медленного – вносится более точная поправка 5 мкм, что дает более равномерную картину распределения амплитуды сигнала (рис. 5б). Этот эффект также служит косвенным свидетельством того, что трековый модуль чувствителен к смещению лазера на 20 мкм и обладает хорошим пространственным разрешением. Кроме того, на рис. 5 наблюдаются два неработающих канала: № 44 и № 75. Причиной отсутствия сигналов на этих каналах является отсутствие электрического контакта между стрипом детектора и каналом с.и.м.с. Можно также заметить повышенный уровень сигнала на соседних стрипах вследствие отсутствия эффекта деления заряда между соседними каналами за счет емкостной связи кабеля.
Рис. 5.
Сравнение режимов сканирования для шага перемещения 20 мкм (а) и 5 мкм (б). Слева – гистограммы количества хитов в каналах с.и.м.с., справа – их амплитуды сигналов.
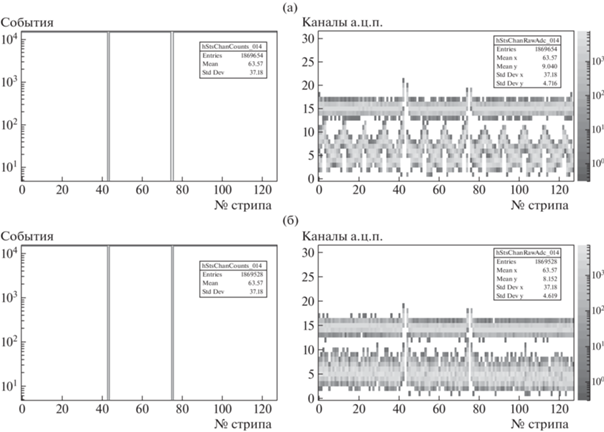
Таким образом, сканирование модуля на лазерном стенде позволяет получить информацию о неработающих и/или шумящих стрипах путем анализа гистограмм количества хитов. В частности, у исследованного опытного сенсора на p‑стороне оказалось 11 неработающих стрипов (1%), а на n-стороне – 13 стрипов (1.3%).
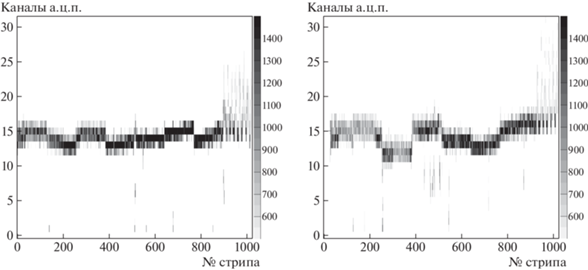
Помимо поиска неработающих стрипов, ставилась задача определения возможности использования лазерного стенда для калибровки считывающей электроники детектора. Каждая микросхема с.и.м.с. имеет 128 независимых каналов. Каждый канал имеет аналоговый тракт, состоящий из зарядочувствительного усилителя, усилителя формирователя и аналого-цифрового преобразователя, а также других элементов. Для аналогового тракта каждого канала используется встроенная в каждую микросхему внутренняя калибровочная цепочка. Однако параметры этой калибровочной цепочки могут варьироваться в разных микросхемах в связи с технологическими допусками на производстве. При этом разброс коэффициентов усиления составляет менее 3%, однако существенный вклад в уровень сигналов дает разница в положении базовой линии для разных калибровочных цепей. На рис. 6 показаны восстановленные амплитуды кластеров на обеих сторонах сенсора при проведении пострипового сканирования. Распределение амплитуд кластеров в виде “ступеней” вызвано разницей в калибровках между разными микросхемами, используемыми для чтения сигналов с одной из сторон сенсора.
Рис. 6.
Амплитуды сигналов (суммарная амплитуда кластера) на обеих сторонах сенсора в зависимости от номера стрипов (центр кластера).
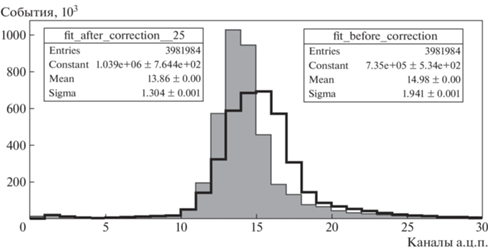
Для введения поправок, компенсирующих этот эффект, использовался следующий алгоритм: 1) определение положений пиков сигналов в стрипах; 2) вычисление среднего для каждой с.и.м.с. положения пиков сигналов; 3) вычисление индивидуального коэффициента пересчета функций отклика для каждой микросхемы, корректирующего к средней для всего модуля амплитуде. В результате для исследованного модуля разброс амплитуд (σ) сократился на 20% на n-стороне и на 30% на p-стороне (рис. 7).
ВЫВОДЫ
Лазерный стенд полностью собран, все компоненты протестированы и откалиброваны. Набранные первичные данные позволяют судить о правильной работе методики. Стенд позволяет варьировать в широких пределах следующие характеристики лазерного излучения: частоту (от 1 Гц до 1 МГц), размер пятна засветки, энергию сигнала с помощью аттенюатора, амплитуды и длительности импульса тока. Таким образом, лазерный стенд имитирует прохождение ионизирующих частиц через полупроводниковый детектор с широкими возможностями по настройке сигнала.
Стенд оптимизирован для проведения тестирования трековых модулей кремниевой трековой системы BM@N. Продемонстрирована возможность идентификации неработающих каналов, а также проведения калибровки считывающей электроники детектора при помощи лазерных импульсов.
Список литературы
Abelev B. et al. and The ALICE Collaboration // J. Phys. G: Nucl. Part. Phys. 2014. V. 41. № 8. 087002. http://iopscience.iop.org/0954-3899/41/8/087002
Ablyazimov T., Abuhoza A., Adak R.P., Adamczyk M., Agarwal K., Aggarwal M.M., Ahammed Z., Ahmad F., Ahmad N., Ahmad S. et al. // Eur. Phys. J. 2017. V. 53. P. 60. https://doi.org/10.1140/epja/i2017-12248-y
Senger P., Dementev D., Heuser J., Kapishin M., Lavrik E., Murin Y., Maksymchuk A., Schmidt H.R., Schmidt C., Senger A., Zinchenko A. // Particles. 2019. V. 2. P. 481. https://doi.org/10.3390/particles2040029
3rd RD48 Status Report. CERN LHCC 2000-009. LEB Status Report/RD48. 31 December 1999. https://rd48.web.cern.ch/status-reports/RD48-3rd-status-report.pdf
Lutz G. Semiconductor Radiation Detectors. Berlin, Heidelberg: Springer-Verlag, 2007. https://doi.org/10.1007/978-3-540-71679-2
The BM@N STS group, Technical Design Report for the Silicon Tracking System as part of the hybrid tracker of the BM@N experiment. Dubna: JINR, 2020. ISBN 978-5-9530-0541-8. http://publications.jinr.ru/record/154087
Sheremetev A., Dementev D., Murin Yu., Sanchez C. Status of the BM@N STS assembly // LXX International conference “NUCLEUS – 2020. Nuclear physics and elementary particles physics. Nuclear physics technologies”. Saint Petersburg, Oct 13, 2020. Oral report. https://indi.to/zNK2T
Kasinski K., Rodriguez-Rodriguez A., Lehnert J., Zubrzycka W., Szczygiel R., Otfinowski P., Kleczek R., Schmidt C.J. // Nucl. Instrum. and Methods. A. 2018. V. 908. P. 225. https://doi.org/10.1016/j.nima.2018.08.076
Kharlamov P., Shitenkov M. // Phys. Part. Nuclei. 2021. V. 52. P. 761. https://doi.org/10.1134/S1063779621040316
Dementev D., Guminski M., Kovalev I., Kruszewski M., Kudryashov I., Kurganov A., Miedzik P., Murin Yu., Pozniak K., Schmidt C.J., Shitenkow M., Voronin A.G., Zabolotny W.M. // Phys. Part. Nuclei. 2021. V. 52. P. 830. https://doi.org/10.1134/S1063779621040213
Shitenkov M., Dementev D., Voronin A., Kovalev I., Kudryashov I., Kurganov A., Murin Yu. // Phys. Part. Nuclei. 2021. V. 52. P. 826. https://doi.org/10.1134/S1063779621040559
Dolezal Z., Escobar C., Gadomski S., García C., González S., Kodys P., Kubik P.K., Lacasta C., Marti S., Mitsou V.A., Moorhead G.F., Phillips P.W., Reznicek P., Slavík R. // Nucl. Instrum. and Methods. A. 2007. V. 573. P. 2. https://doi.org/10.1016/j.nima.2006.10.319
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента