

Приборы и техника эксперимента, 2022, № 3, стр. 126-134
РАДИОЛОКАЦИОННЫЙ МЕТОД ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА
В. Л. Гулько a, А. А. Мещеряков a, *, Н. К. Блинковский a
a Томский государственный университет систем управления и радиоэлектроники
634050 Томск, просп. Ленина, 40, Россия
* E-mail: msch@rts.tusur.ru
Поступила в редакцию 20.01.2022
После доработки 26.01.2022
Принята к публикации 04.02.2022
- EDN: OZNMIE
- DOI: 10.31857/S0032816222040048
Аннотация
Для определения угла крена летательного аппарата по пассивному поляризационно-анизотропному радиолокационному уголковому отражателю с горизонтальной собственной поляризацией используются поляризационно-модулированные по углу ориентации плоскости поляризации зондирующие сигналы. Оценка угла крена летательного аппарата осуществляется на выходе приемника по фазе спектральной составляющей на удвоенной частоте вращения плоскости поляризации излучаемых сигналов, содержащейся в спектре огибающей принятых сигналов. Описан макет экспериментальной установки, реализующий этот метод. Приведены экспериментальные результаты измерения угла крена летательного аппарата. Среднеквадратичная ошибка измерения угла крена составила 0.98°.
ВВЕДЕНИЕ
Известные методы измерения угла крена летательного аппарата (л.а.) основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1–4]. Таким методам измерения и реализующим их устройствам присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений, и за один час полета она составляет несколько единиц градусов [2, 3]. Во-вторых, если л.а. развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может приводить к полной потере его работоспособности [2].
В настоящей работе рассматривается радиолокационный метод измерения угла крена л.а. по пассивному радиомаяку в виде поляризационно-анизотропного уголкового отражателя с заданными поляризационными характеристиками рассеяния с использованием поляризационно-модулированных по углу ориентации плоскости поляризации зондирующих сигналов.
Использование поляризационных характеристик рассеяния пассивного радиомаяка для оценки угла крена л.а. обусловливает необходимость их рассмотрения в конкретных поляризационных базисах и в различных системах координат, связанных с радиомаяком и л.а. При этом выбор опорной системы координат (о.с.к.), связанной с радиомаяком, собственной системы координат (с.с.к.), связанной со строительными осями л.а., а также алгоритма обработки поляризационно-модулированных принятых сигналов определяется как особенностями решаемой технической задачи, так и удобством анализа с точки зрения физической интерпретации полученных результатов.
ОПИСАНИЕ МЕТОДА
Суть радиолокационного метода определения угла крена л.а. заключается в следующем.
Расположим в точке O с известными координатами пассивный радиомаяк в виде поляризационно-анизотропного радиолокационного отражателя с горизонтальной собственной поляризацией (рис. 1). Радиолокационный отражатель выполнен в виде трехгранного уголкового отражателя (УО), состоящего из трех плоских взаимно перпендикулярных металлических или металлизированных треугольных граней одинакового размера, значительно превышающего длину волны. Введем декартову о.с.к., оси OX и OZ которой находятся в горизонтальной плоскости XOZ, а ось OY перпендикулярна ей. Вершину УО поместим в начало о.с.к. – точку O (см. рис. 1). Известно [5, 6], что для придания поляризационно-изотропному трехгранному УО поляризационно-анизотропных свойств с горизонтальной собственной поляризацией необходимо в раскрыве УО разместить вертикально ориентированную поляризационную решетку (ПР) из параллельных металлических стержней (или проволок) с шагом А и диаметром стержней В. Параметры А и В поляризационной решетки выбираются такими [5, 6], чтобы составляющая вектора напряженности электрического поля падающей электромагнитной волны, плоскость поляризации которой ортогональна стержням решетки (проволокам), пройдя через ПР, практически не изменялась. После трехкратного отражения от граней УО электромагнитная волна распространяется в направлении, обратном направлению падения. При этом отраженная электромагнитная волна всегда горизонтально поляризована, независимо от угла ориентации плоскости поляризации падающей волны, и ее фазовый центр рассеяния находится в вершине УО, расположенной в точке O [5].
Рис. 1.
Поляризационно-анизотропный радиолокационный отражатель. УО – трехгранный уголковый отражатель с треугольными гранями; ПР – поляризационная решетка.

В то же время составляющая вектора напряженности электрического поля, плоскость поляризации которой параллельна стержням (или проволокам), находится в вертикальной плоскости и полностью отражается от ПР, как от плоской металлической пластины [5]. Таким образом, трехгранный УО с размещенной в плоскости раскрыва вертикально ориентированной ПР рассматривается как поляризационно-анизотропный объект с горизонтальной собственной поляризацией, которая всегда совпадает с горизонтальной плоскостью XOZ. Его матрица рассеяния в собственной о.с.к. в линейном поляризационном базисе может быть представлена в виде [6–8]:
где ${{\sigma }_{m}} = \lambda _{1}^{2}$ – максимально возможная эффективная поверхность рассеяния поляризационно-анизотропного трехгранного УО при облучении его горизонтально поляризованной электромагнитной волной. Максимум эффективной поверхности рассеяния совпадает с электрической осью симметрии, проходящей через вершину УО в точке O перпендикулярно плоскости раскрыва. λ1 – модуль собственного числа матрицы рассеяния.Из формулы (1) следует, что в собственной о.с.к. вырожденная матрица рассеяния трехгранного УО, в раскрыве которого помещена вертикально ориентированная ПР, в линейном поляризационном базисе эквивалентна матрице рассеяния ярко выраженного поляризационно-анизотропного радиолокационного объекта, представляющего собой горизонтальный вибратор [8].
Рассмотрим случай, когда с борта л.а. поляризационно-анизотропный УО с матрицей рассеяния (1) облучается линейно поляризованной электромагнитной волной, вектор напряженности электрического поля которой вращается с частотой Ω. Тогда отраженная от граней трехгранного УО электромагнитная волна, независимо от угла ориентации плоскости поляризации падающей волны, будет всегда иметь горизонтальную поляризацию, вектор напряженности электрического поля ${{\vec {E}}_{{\text{г}}}}$ которой совпадает с осью OX о.с.к. и находится в горизонтальной плоскости XOZ (рис. 2а). При этом максимум амплитуды отраженной от УО волны будет наблюдаться при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, которая всегда находится в горизонтальной плоскости XOZ. Минимум амплитуды будет наблюдаться при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Тогда за полный оборот вращения плоскости поляризации излученной волны с частотой Ω амплитуда отраженной от УО и соответственно принятой на борту л.а. волны будет промодулирована с частотой 2Ω.
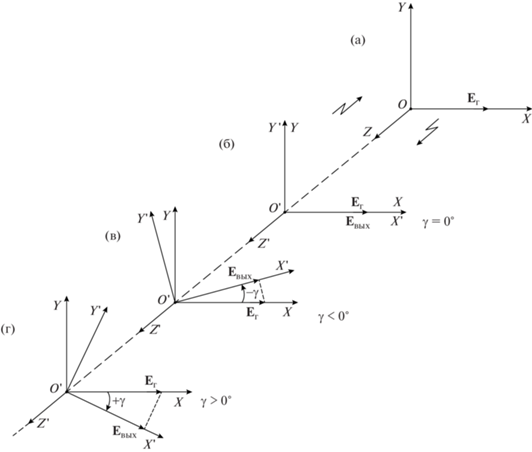
Пусть л.а. находится в точке O' и движется в направлении на пассивный радиомаяк, и его углы тангажа и рыскания равны нулю. Определим с.с.к., связанную с корпусом л.а., как подвижную декартову систему координат X 'O'Y ', образованную поперечной O'X ', вертикальной O'Y ' и продольной O'Z ' строительными осями л.а. Начало ее поместим в точку O', совпадающую с центром масс л.а. Очевидно, что когда крен л.а. отсутствует, т.е. γ = 0, направление правой поперечной полуоси O'X ' и положительное направление оси OX совпадают с направлением вектора электрического поля ${{{\mathbf{E}}}_{{\text{г}}}}$ отраженной от УО электромагнитной волны, и они лежат в горизонтальной плоскости XOZ (рис. 2б). Соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту л.а. электромагнитная волна с вектором ${{{\mathbf{E}}}_{{\text{г}}}}$ совпадают по поляризации и также находятся в горизонтальной плоскости XOZ.
Когда γ ≠ 0, правая поперечная полуось O'X ' л.а. будет повернута против часовой или по часовой стрелке в плоскости XOY на угол, равный углу крена ±γ (рис. 2в и 2г). Таким образом, возникновение крена л.а. эквивалентно операции поворота с.с.к. в ту или другую сторону на угол ±γ относительно о.с.к. в плоскости XOY. Сама операция поворота с.с.к. может быть определена с помощью соответствующих операторов поворота [6, 7], которые будут рассмотрены ниже.
Пусть л.а. имеет в общем случае крен ±γ. Тогда, используя формализм векторов и матриц Джонса [9], найдем вектор Джонса на выходе линейного поляризатора в линейном поляризационном базисе с помощью преобразований вида [10]:
(2)
${{{\mathbf{E}}}_{{{\text{вых}}}}} = C\{ [\Pi ][R( - \alpha )][R( \mp \gamma )][S][R( \pm \gamma )][R(\alpha )]{\mathbf{E}}\} ,$Выполнив в формуле (2) необходимые матричные преобразования, получим вектор Джонса на выходе линейного поляризатора в виде:
(3)
${{{\mathbf{E}}}_{{{\text{вых}}}}} = C\left[ {\begin{array}{*{20}{c}} {{{{\cos }}^{2}}(\alpha \pm \gamma )} \\ 0 \end{array}} \right].$Тогда сигнал непосредственно на входе приемника будет иметь вид:
Амплитуда сигнала на выходе приемника с логарифмической амплитудной характеристикой и линейным детектором будет равна
После преобразований (5), с учетом того, что уровень сигнала в случае логарифмического приемника обычно измеряют в децибелах, при α = Ωt получим:
(6)
$A(\Omega t)[{\text{дБ}}] = 20{\text{lg}}C + 20{\text{lg}}\left\{ {\frac{1}{2}(1 + {\text{cos}}(2\Omega t \pm 2\gamma ){\kern 1pt} )} \right\}.$Соотношение (6) позволяет рассчитать зависимость амплитуды выходного сигнала логарифмического приемника от углового положения α плоскости поляризации излучаемого сигнала для различных значений угла крена γ. Результаты расчета приведены на рис. 3. Кривые 1–3 соответствуют значениям угла крена γ, равным 0, 15°, –15°.
Рис. 3.
Зависимости амплитуды выходного сигнала логарифмического приемника от угла ориентации α плоскости поляризации излучаемых сигналов при углах крена γ: 0° (1), 15° (2) и –15° (3).
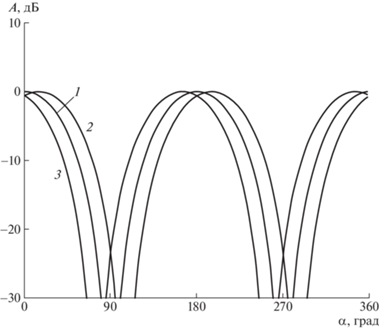
Согласно рис. 3, амплитуда сигнала на выходе приемника промодулирована удвоенной частотой вращения плоскости поляризации излучаемого сигнала. При этом амплитудная модуляция сигнала достигает 100%-ной глубины и не зависит от крена γ л.а., а сдвиг сигнала по фазе определяет удвоенный угол крена γ л.а. Поэтому в спектре огибающей выходного сигнала логарифмического приемника присутствует спектральная составляющая на частоте 2Ω. Eе амплитуду A2Ω с учетом формулы (6) можно найти с помощью фурье-преобразования вида:
(7)
${{A}_{{2\Omega }}}[{\text{дБ}}] = \frac{1}{\pi }\int\limits_0^{2\pi } {A(\Omega t)} \cos 2\Omega td(\Omega t),$Фаза φ2Ω отсчитывается относительно фазы опорного сигнала cos(2Ωt), определяемой угловым положением плоскости поляризации излучаемого сигнала.
Необходимо также отметить, что амплитуда A2Ω и фаза φ2Ω не зависят от потенциала передатчика, чувствительности приемника и расстояния от л.а. до пассивного радиомаяка и его эффективной поверхности рассеяния. Энергетические параметры определяют постоянную составляющую сигнала на выходе логарифмического приемника бортовой радиолокационной станции (р.л.с.).
ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННОЙ Р.Л.С.
С целью проверки результатов теоретических исследований и получения экспериментальных оценок точности определения угла крена γ л.а. создан макет поляризационно-модуляционной р.л.с. Функциональная схема макета представлена на рис. 4. Макет включает в себя наземный пассивный радиомаяк, расположенный в точке с известными координатами, а также сверхвысокочастотную (с.в.ч.) одноканальную поляризационно-модуляционную р.л.с. на основе самолетной р.л.с. “Гроза-26”. Пассивный радиомаяк представляет собой поляризационно-анизотропный трехгранный УО, в раскрыве которого помещена вертикально ориентированная ПР в виде проводников с шагом A = 8 мм и диаметром проводников B = 0.8 мм. Для реализации предложенного метода был доработан штатный облучатель приемно-передающей антенны р.л.с. “Гроза-26” путем установки в него поляризационного модулятора. Поляризационный модулятор включал в себя вращающуюся секцию круглого волновода с полуволновой фазовой пластиной, которая изменяла плоскость поляризации излучаемых сигналов с частотой Ω = 20 Гц. Приемно-передающая антенна представляла собой параболическое зеркало диаметром 760 мм. Ширина диаграммы направленности антенны по уровню половинной мощности составляла 3°, коэффициент усиления антенны 25 дБ, чувствительность приемника –120 дБ/Вт, длительность излучаемых импульсов 3.5 мкс; частота повторения импульсов 400 Гц; мощность излучения 9 кВт.
Рис. 4.
Функциональная схема поляризационно-модуляционной р.л.с. для определения угла крена л.а. УО – трехгранный уголковый отражатель; ПР – поляризационная решетка; БЗА – бортовая зеркальная приемно-передающая антенна; ПМ – поляризационный модулятор; ЛП – линейный поляризатор; АП – антенный переключатель; П – передатчик; БУШД – блок управления шаговым двигателем; СШД – синхронный шаговый двигатель; ЛФП – логарифмический приемник; ДУПП – датчик углового положения полуволновой фазовой пластины; БС – блок стробирования; БФОС – блок формирования опорного сигнала; ПД – пиковый детектор; ФД – фазовый детектор; ПФ – полосовой фильтр; ИУК – индикатор угла крена л.а.; АД – амплитудный детектор.

Поляризационно-модуляционная р.л.с. работает следующим образом.
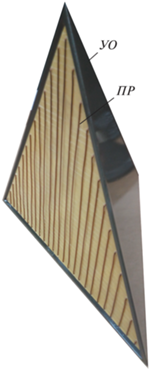
В точке с известными координатами устанавливают пассивный радиомаяк, представляющий собой поляризационно-анизотропный трехгранный УО с горизонтальной собственной поляризацией, в раскрыве которого помещена вертикально ориентированная ПР. Внешний вид пассивного поляризационно-анизотропного радиомаяка представлен на рис. 5.
Рис. 5.
Внешний вид пассивного радиомаяка. УО – трехгранный уголковый отражатель, ПР – поляризационная решетка.
С борта л.а. передатчик П генерирует исходный радиоимпульс с горизонтальной поляризацией, который через антенный переключатель АП поступает на линейный поляризатор ЛП с горизонтальной собственной поляризацией, совпадающей с поперечной осью л.а. Линейный поляризатор, представляет собой переход от волновода с прямоугольным сечением к волноводу с круглым сечением. С выхода ЛП со стороны круглого волновода сигнал через поляризационный модулятор ПМ поступает в бортовую зеркальную приемно-передающую антенну БЗА и излучается в направлении наземного радиомаяка. Поляризационный модулятор осуществляет вращение с частотой Ω плоскости поляризации излучаемых сигналов. Частота вращения Ω удовлетворяет условию:
где Fn – частота повторения импульсов.Выполнение условия (9) необходимо для согласования поляризаций зондирующих и принимаемых сигналов. Вращение плоскости поляризации излучаемого сигнала в ПМ осуществляется за счет механического вращения с частотой
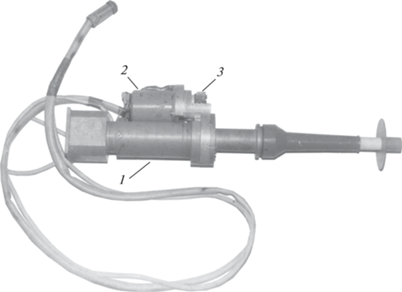
круглой волноводной секции с вмонтированной в нее полуволновой фазовой пластиной. Вращение волноводной секции осуществляется синхронным шаговым двигателем СШД, механически связанным с помощью шестеренной передачи 1:1 с волноводной секцией и датчиком углового положения фазовой пластины ДУПП. Управление СШД осуществляется по сигналам, поступающим от блока управления шаговым двигателем БУШД, который задает механическую частоту вращения волноводной секции, равной Ω' = 10 Гц. Датчик углового положения фазовой пластины выполнен в виде геркона, подключенного через нагрузочное сопротивление к бортовой сети +27 В. Управление герконом осуществляется двумя магнитами, диаметрально расположенными на шестерне СШД. По выходному сигналу ДУПП в блоке формирования опорного сигнала БФОС формируется опорное косинусоидальное напряжение с учетом условия (10) с частотой 4Ω', необходимое для работы фазового детектора ФД. Внешний вид поляризационного модулятора, выполненного на основе штатного облучателя приемно-передающей антенны р.л.с. “Гроза-26”, представлен на рис. 6.Рис. 6.
Внешний вид штатного облучателя бортовой зеркальной антенны р.л.с. “Гроза-26” с поляризационным модулятором. 1 – поляризационный модулятор с вмонтированной внутрь полуволновой фазовой пластиной; 2 – синхронный шаговый двигатель; 3 – датчик углового положения полуволновой фазовой пластины.
Излученная с борта л.а. в направлении пассивного радиомаяка электромагнитная волна падает на трехгранный УО, в плоскости раскрыва которого помещена ПР. Плоскость поляризации электромагнитной волны вращается с частотой Ω = 20 Гц. Действие ПР сводится к тому, что отраженная от УО волна становится промодулированной по амплитуде удвоенной частотой вращения плоскости поляризации 2Ω. При этом плоскость поляризации отраженной от УО электромагнитной волны всегда горизонтальна и не зависит от ориентации плоскости поляризации падающей на УО волны. Принятая на борту л.а. приемной антенной амплитудно-модулированная волна проходит через ПМ, ЛП и АП на вход логарифмического приемника ЛФП. Продетектированный сигнал на его выходе будет иметь вид (6). Поскольку частота вращения Ω плоскости поляризации связана с частотой вращения Ω' ПМ соотношением (10), амплитуда на выходе ЛФП будет иметь вид:
(11)
$\begin{gathered} A(\Omega {\kern 1pt} {\text{'}}t)[{\text{дБ}}] = 20\lg C + \\ \, + 20\lg \left\{ {\frac{1}{2}(1 + \cos (4\Omega {\kern 1pt} {\text{'}}t \pm 2\gamma ))} \right\}. \\ \end{gathered} $Из формулы (11) следует, что при использовании ПМ в виде вращающейся с частотой Ω ' волноводной секции с полуволновой пластиной амплитуда сигнала становится промодулированной учетверенной частотой вращения этой пластины 4Ω'.
С выхода ЛФП продетектированный сигнал поступает на блок стробирования БС, где происходит съем информации с дальности, на которой находится пассивный радиомаяк. В пиковом детекторе ПД осуществляется запоминание амплитуды сигнала на период повторения зондирующих импульсов. В полосовом фильтре ПФ выделяется спектральная составляющая на частоте 4Ω', содержащейся в спектре огибающей выходного сигнала ЛФП. Информация об угле крена γ л.а. содержится в фазе этой спектральной составляющей φ4Ωʹ и, в соответствии с формулой (11), определяется соотношением
В ФД измеряется фаза φ4Ωʹ относительно фазы опорного сигнала cos(4Ωʹt), поступающего из БФОС. Фаза последнего определяется угловым положением полуволновой фазовой пластины. Амплитуда спектральной составляющей A4Ωʹ измеряется амплитудным детектором АД, а значение угла крена γ л.а., с учетом формулы (12), выводится на индикатор угла крена ИУК.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТА
Для проверки работоспособности предложенного метода измерения угла крена л.а. эксперимент проводился на наземной наклонной трассе протяженностью 1300 м. Пассивный радиомаяк (поляризационно-анизотропный трехгранный УО) располагался на земной поверхности. Эффективная поверхность рассеяния УО составляла 420 м2. Приемно-передающая антенна поляризационно-модуляционной р.л.с. была установлена на крыше радиотехнического корпуса ТУСУР на высоте 18 м и наведена на пассивный радиомаяк.
Методика измерения заключалась в следующем.
Радиолокационная станция облучала пассивный радиомаяк поляризационно-модулированным сигналом и принимала отраженный от него радиосигнал. На выходе логарифмического приемника р.л.с. регистрировались амплитуда спектральной составляющей A4Ω' и ее фаза φ4Ω', по которой определялся угол крена.
Имитация изменения угла крена осуществлялась путем изменения ориентации пассивного радиомаяка в вертикальной плоскости вокруг его электрической оси симметрии с шагом 1° в пределах ±15° относительно исходного вертикально ориентированного положения ПР. Вертикально ориентированное положение ПР соответствовало нулевому значению угла крена.
Измерения фазы φ4Ωʹ проводились для каждого углового положения пассивного радиомаяка в заданном диапазоне углов в течение тридцатисекундного интервала времени с последующим усреднением. При этом фиксировался и средний уровень отраженного сигнала.
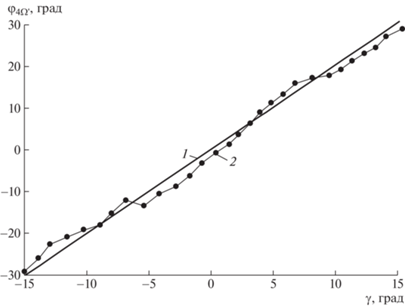
Результаты измерений φ4Ω' приведены на рис. 7 (кривая 2). На этом же рисунке представлена теоретическая зависимость (кривая 1), полученная в соответствии с выражением (12). Среднеквадратическое отклонение измеренного угла крена от заданного составило ${{\sigma }_{\gamma }} = 0.98^\circ .$
ЗАКЛЮЧЕНИЕ
1. Предложен и опробован поляризационно-модуляционный метод измерения угла крена по пассивному поляризационно-анизотропному радиомаяку, основанный на использовании поляризационно-модулированных по углу ориентации плоскости поляризации зондирующих сигналов.
2. Теоретически исследована и экспериментально подтверждена связь фазы спектральной составляющей на частоте 4Ω' с углом крена для исследуемого поляризационного модулятора в виде вращающейся с частотой Ω' полуволновой фазовой пластины.
3. Получены экспериментальные оценки точности измерения угла крена.
4. Описанный метод может найти применение в системах ориентации летательного аппарата при заходе на посадку по приборам. Метод технически прост в реализации, так как измерение навигационного элемента осуществляется на выходе приемника на частоте, кратной частоте поляризационной модуляции.
Список литературы
Skrypnik O.N. Radio Navigation Systems for Airports and Airways. Springer, 2019.
Пельпор Д.С., Ягодкин В.В. Гироскопические системы. М.: Высшая школа, 1988.
Александров А.С., Арно Г.Р. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. СПб.: ГУНИО МО РФ, 1994.
Ярлыков М.С. Статистическая теория радионавигации. М.: Радио и связь, 1985.
Кобак В.О. Радиолокационные отражатели. М.: Сов. Радио, 1975.
Богородский В.В., Кaнaрейкин Д.Б., Козлов А.И. Поляризация рассеянного и собственного радиоизлучения земных покровов. Л.: Гидрометеоиздат, 1981.
Козлов А.И., Логвин А.И., Сарычев В.А. Поляризация радиоволн “Радиолокационная поляриметрия”. М.: Радиотехника, 2007.
Бадулин Н.Н., Гулько В.Л., Масалов Е.В. // Изв. вузов МВ и ССО СССР. Радиоэлектроника. 1986. Т. 29. № 11. С. 81.
Аззам Р., Башара Н. Эллипсометрия и поляризованный свет. М.: Мир. 1981.
Гулько В.Л. Патент RU 2537384, МПКG01S1З/93 // БИ. № 1 Опубл. 10.01.2015.
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента