

Приборы и техника эксперимента, 2022, № 5, стр. 31-42
ДИСТАНЦИОННОЕ ИЗМЕРЕНИЕ ИМПЕДАНСА С ДЛИННОЙ СОЕДИНИТЕЛЬНОЙ ЛИНИЕЙ (обзор)
А. С. Иваницкий a, А. А. Кордо a, *, Л. И. Бойко a
a ОНПП “Технология” им. А.Г. Ромашина
249031 Обнинск, Калужской обл., Киевское ш., 15, Россия
* E-mail: kordoaa@technologiya.ru
Поступила в редакцию 14.02.2022
После доработки 19.04.2022
Принята к публикации 29.04.2022
- EDN: CWPILY
- DOI: 10.31857/S0032816222050184
Аннотация
С единых позиций проанализированы существующие решения задачи таких дистанционных измерений электрического импеданса, при которых соединение измеряемого объекта со средством измерений является длинной линией. Это, в частности, имеет место при экспериментальном изучении влияния на высокочастотные свойства диэлектрических и магнитных материалов и характеристики электрорадиоэлементов испытательных факторов, исключающих размещение указанного объекта вблизи средства измерений и оператора. Основным критерием была свобода выбора соотношения “измерительная частота–длина линии” с сохранением точности измерений. Анализу подвергнуты имеющиеся изобретения, сгруппированные по сходству способов учета параметров линий, два вида современных импедансметров и две модификации одного из них. Показано, что известные изобретения и импедансметры имеют, в целом, ограниченные возможности и что только упомянутые модификации могут служить основой средств измерений, способных достаточно кардинально решить названную задачу.
ВВЕДЕНИЕ
В экспериментальной практике подчас возникает потребность в таком дистанционном измерении электрического импеданса, при котором соединение измеряемого объекта со средством измерений представляет собой длинную линию, и необходимо считаться с распределенным характером ее параметров. Подобная ситуация имеет место, например, при оценке влияния на высокочастотные свойства диэлектрических и магнитных материалов и характеристики электрорадиоэлементов таких внешних воздействий, которые не допускают размещения указанного объекта вблизи средства измерений и/или оператора (повышенная и пониженная температура, высокая влажность, ионизирующее излучение и т.п. как по отдельности, так и в различных сочетаниях). Длина соединительной линии может составлять от десятых долей до десятков метров, ее параметры, как правило, значительно искажают результат измерения, и требуется устранение вызванной ими погрешности.
Задача выполнения подобных измерений возникла уже давно, и за прошедшее время были предприняты многократные попытки ее решения. Однако до сих пор отсутствует оценка с единых позиций полученных результатов, позволяющая определить конкретную степень пригодности того или иного варианта для такого назначения. Цель настоящего обзора состоит в хотя бы частичном восполнении этого пробела. Для ее достижения проанализированы существующие изобретения, сгруппированные по сходству способов учета или использования параметров соединительных линий. Проведен также анализ современных автоматических импедансметров одного из ведущих производителей − фирмы Keysight Technologies Inc. (США): на основе автобалансного моста (АБМ) с четырьмя измерительными зажимами и по радиочастотному методу вольтметра–амперметра. Кроме того, рассмотрены принципиальные возможности измерителей на основе трех- и двухзажимного АБМ. Основными критериями при анализе были следующие: возможность выбора верхней измерительной частоты и предельной длины соединительной линии, диапазон измеряемых величин и точность измерения, диапазон рабочих частот и его непрерывность, сложность устройства, включая цепь измеряемого объекта, и сложность процессов измерения и определения по его результатам искомой величины. Акцент был сделан на сравнении конкретных устройств, поскольку сравнение методов измерения позволяет, в лучшем случае, оценить лишь их потенциальную пригодность, ибо, как показано далее, измерительные устройства, даже использующие один и тот же метод, могут обладать существенно различающимися возможностями в отношении измерений рассматриваемого типа.
СУЩЕСТВУЮЩИЕ ИЗОБРЕТЕНИЯ
Изобретения, касающиеся дистанционных измерений импеданса с длинными соединительными линиями, можно условно разделить по упомянутому признаку на пять основных групп. К первой относятся те из них, в которых используются свойства линии, выполненной обычно коаксиальным кабелем, длиной в нечетное число λк/4 или целое число λк/2, где λк – длина волны измерительного сигнала в кабеле. Искомая величина в этом случае определяется по модулю или изменению модуля входного импеданса линии. При этом, в зависимости от конкретных особенностей измерительного устройства, измеряемый объект подключается к выходу линии либо непосредственно, либо через некую промежуточную цепь, в том числе и образуя с элементами этой цепи и/или с линией резонансный контур. Исторически такие изобретения появились раньше других (имеется подобный патент США от 1943 г.). Примерами их являются решения [1, 2]. Их основные недостатки состоят в пригодности для измерения только реактивных компонентов импеданса (при значительно меньшем активном компоненте) в относительно небольшом диапазоне их значений и только на фиксированных, кратных друг другу частотах и/или в узких частотных полосах вблизи них.
Вторая группа объединяет изобретения, основанные на размещении в разных ветвях дифференциальной или мостовой цепи двух одинаковых – “рабочего” и “компенсационного” – коаксиальных кабелей, причем второй предназначен для нейтрализации влияния первого на результат измерения. Измеряемый объект подключается “рабочим” кабелем, а искомый импеданс определяется по импедансу регулируемого образцового объекта, подключенного “компенсационным” кабелем, в момент, когда обе ветви симметричны, т.е. имеют одинаковые электрические характеристики. К числу таких изобретений относятся устройства [3, 4]. Длина соединительной линии в них формально не лимитирована, но фактически ее ограничение имеет место ввиду роста с ее увеличением степени неидентичности реальных, даже специально подобранных, кабелей. Остается и связанная с этим фактором погрешность измерения, особенно существенная для малых компонентов измеряемого импеданса. Кроме того, ввиду несогласованности кабелей невозможны измерения на частотах, где длина линии близка к нечетному числу λк/4. Еще одним недостатком является узкий диапазон измеряемых величин, находящихся в пределах изменения импеданса образцового объекта.
Третья группа включает в себя устройства [5, 6], которые сходны с устройствами второй группы, но в которых нейтрализация влияния двухкабельной соединительной линии осуществляется их предварительной настройкой по результатам дополнительных измерений при коротком замыкании (КЗ) линии и при нагружении ее эталоном – объектом с точно известным импедансом. Настройка, начиная с режима КЗ, выполняется регулировкой импедансов специальных схемных элементов тоже до достижения электрической симметрии двух ветвей. Для таких устройств нет явных ограничений по верхней измерительной частоте, предельной длине линии и свойствам ее кабелей и характерна высокая точность измерения, а мост [6] имеет и широкий диапазон измеряемых величин. Однако измерительный процесс с применением таких устройств сложен и трудоемок из-за указанной настройки, поскольку она требует раздельных по активному и реактивному компонентам и, как правило, многократных регулировок. Ввиду же зависимости параметров линии от частоты при каждом изменении последней в ходе измерений такую настройку надо выполнять заново. А для упомянутого моста ситуация дополнительно усугубляется необходимостью в достаточно трудоемком двойном уравновешивании с использованием ветки Вагнера. Следует также отметить, что из-за несогласованности кабелей такие устройства тоже непригодны для работы в непрерывном частотном диапазоне (это подробнее обосновано ниже для устройства с двухзажимным АБМ).
К сожалению, абсолютное большинство рассмотренных изобретений базируется на измерительной технике, существовавшей несколько десятилетий тому назад, и вряд ли годится для создания современных автоматических средств измерений. Исключение составляют разве что трансформаторные мосты, да и то для частот, не превышающих в лучшем случае десятков мегагерц. Поэтому их более подробный анализ представляется нецелесообразным.
Изобретения четвертой группы предусматривают нейтрализацию влияния соединительной линии путем расчета по данным нескольких (трех и более) измерений. Их примером является способ [7], относящийся к частному случаю измерения чисто активных сопротивлений, а их практическая реализация стала возможной только с развитием вычислительной техники. Подобный подход использован и в рассматриваемых далее средствах измерений Keysight Technologies, описанных в справочном пособии этой фирмы [8], и в измерителях на основе трех- и двухзажимного АБМ.
Наконец, пятая группа объединяет решения типа [9], базирующиеся на определении искомого импеданса по соотношению падающей и отраженной волн в длинной линии, нагруженной измеряемым объектом. Современными реализациями подобных устройств являются векторные анализаторы цепей. Они выпускаются многими производителями, в том числе и вышеназванной фирмой. Соединительной линией служит коаксиальный кабель, а векторный анализатор цепей, из-за наличия у измеряемого объекта только одного порта (он представляет собой двухполюсник), используется как рефлектометр. Их существенными недостатками являются низкая точность измерения импедансов, модули которых заметно отличаются от волнового сопротивления кабеля, и необходимость в повторных калибровках при каждом изменении измерительной частоты [8, pр. 27, 42–44]. Поэтому возможности их применения для измерений рассматриваемого типа весьма ограничены.
ИМПЕДАНСМЕТР НА ОСНОВЕ ЧЕТЫРЕХЗАЖИМНОГО АБМ
Импедансметры на основе АБМ довольно подробно описаны в упомянутом справочнике (и более сжато в аналогичном пособии японской корпорации Hioki [10]). Их предельная рабочая частота немного выше 100 МГц. Первые модели таких измерителей появились более 25 лет тому назад, но ввиду свойственных им широкого диапазона измеряемых величин и хорошей точности измерения различные аспекты их конструктивно-схемных особенностей и применения остаются в сфере внимания специалистов (см., например, [11–13]). Их использование для дистанционных измерений детализировано в издании [14]. Оно непосредственно касается относительно старого и снятого с производства прибора, но его основные положения, в принципе, распространяются и на более новые модели, вплоть до анализатора импеданса Е4990А.
АБМ фактически служит основой измерительной части импедансметра, включающей, кроме самого АБМ, цепь измеряемого объекта из соединительной линии и измерительной ячейки. По сути, это измеритель сопротивлений, в том числе комплексных, в режиме заданного напряжения на цепи измеряемого объекта с преобразователем тока через этот объект в напряжение на усилителе с резистивной параллельной отрицательной обратной связью. Строго говоря, метод измерения с АБМ – это разновидность метода вольтметра–амперметра, но его часто рассматривают как самостоятельный.
Хотя типичным вариантом АБМ является двухзажимный, при недистанционных измерениях, как правило [8, pp. 54, 57–64, 80, 81, 85], а при дистанционных – в обязательном порядке [14, pp. 4, 5] используется четырехзажимный, с четырехкабельной соединительной линией. При этом цепь измеряемого объекта имеет так называемую 4ТР-конфигурацию (от англ. 4 terminal pair), подобную соединению Кельвина, которое широко применяется на постоянном токе и низких частотах. Все кабели одинаковы и согласованы постоянными резисторами [14].
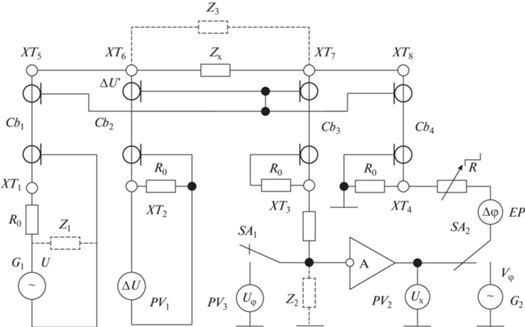
Схема такого измерителя представлена на рис. 1. Генераторы G1, G2, вольтметры PV1−PV3, инвертирующий усилитель A, регулируемый фазовращатель EP, измерительные зажимы XT1−XT4, сопротивления R и R0 входят в АБМ, причем элементы А, PV2, EP и R относятся к преобразователю “ток−напряжение”. В этот преобразователь также конструктивно входят имеющие вспомогательное назначение генератор G2, векторный вольтметр PV3 и коммутирующий элемент SA. Остальные элементы являются составными частями цепи измеряемого объекта. К ней фактически относятся и резисторы сопротивлением R0, равным волновому сопротивлению ρ кабелей, формально входящие в АБМ. По аналогии с соединением Кельвина кабели Cb1 и Cb4 и зажимы XT1, XT4, XT5 и XT8 именуются тóковыми, а остальные кабели и зажимы – потенциальными. 4ТР-конфигурация, предусматривающая соединение экранов кабелей на выходе линии и их изоляцию друг от друга на ее входе, обеспечивает отсутствие помех в потенциальных кабелях от токов в токовых и взаимного влияния последних друг на друга, что особенно важно при малых величинах |Zx| и, соответственно, больших токах. Но такая конфигурация, согласно рис. 1, не позволяет соединить с общей, заземляемой, точкой устройства общие точки всех трех узлов АБМ и экраны всех кабелей. На схеме показано такое соединение для общей точки преобразователя и экрана Cb4.
Рис. 1.
Схема дистанционного импедансметра с четырехзажимным АБМ. G1 – генератор измерительного напряжения (U); G2 – вспомогательный генератор напряжения (Vφ); PV1 – вольтметр для измерения напряжения (∆U), обусловленного напряжением (∆U') на зажиме XT6 (см. ниже); PV2 – векторный вольтметр для измерения выходного напряжения (Uх) инвертирующего усилителя А (модуля и фазового сдвига относительно ∆U); PV3 – вспомогательный векторный вольтметр для измерения напряжения (Uφ) на входе усилителя (модуля и фазового сдвига относительно Vφ); SA – коммутирующий элемент для G2 и PV3; EP – регулируемый фазовращатель для введения в петлю обратной связи компенсирующего фазового сдвига (∆φ); XТ1−XТ4 – измерительные зажимы; XT5−XT8 – зажимы измерительной ячейки; R – сопротивление резистора, задающего поддиапазон измерения; R0 − сопротивление согласующих резисторов; Cb1−Cb4 – кабели соединительной линии; Zх – импеданс измеряемого объекта; Z1, Z2 – эквивалентные импедансы, отражающие шунтирование узлов АБМ цепью измеряемого объекта; Z3 – паразитный импеданс измерительной ячейки.
При достаточно высоком усилении по напряжению усилителя А (и |Z3| ≫ |Zх|) связь между искомым (Zх) и измеряемым ($Z_{{\text{x}}}^{'}$) импедансами в отсутствие соединительной линии имеет с учетом условия ∆U = ∆U ' вид [10]:
При дистанционном измерении выражение для $Z_{{\text{x}}}^{'}$ изменяется:
(2)
$Z_{{\text{x}}}^{'} = \frac{{\Delta U{\kern 1pt} '}}{{{{U}_{{\text{x}}}}}}{{Z}_{{{\text{ос}}}}},$Кабели Cb1 и Cb4 на вид формулы (2) не влияют: первый – ввиду того, что падение напряжения на нем не входит в ∆U ', а второй – из-за практической эквипотенциальности зажима ХТ7 и общей точки преобразователя.
Величины ∆U ' и ∆U как входное и выходное напряжения согласованного кабеля Cb2 связаны выражением
где γ и l – соответственно постоянная распространения и длина кабеля, причем где α – коэффициент затухания; j – мнимая единица; β – фазовая постоянная.Импеданс Zос совпадает с В-параметром четырехполюсника, образованного каскадным соединением “Cb4–R” и имеющего матрицу А-параметров, равную произведению
Подстановка выражений для ∆U ' и Zос в формулу (2) дает после преобразований и учета того, что $Z_{{\text{x}}}^{'}$ по-прежнему определяется формулой (1), следующее выражение
где P и Q – параметры соединительной линии, обусловленные характеристиками указанных кабелей, причем $P = {\text{sh}}({{\gamma }}l) + {\text{ch}}({{\gamma }}l)$ и $Q = \rho {\text{sh}}({{\gamma }}l)$.Величины P и Q, в принципе, можно было бы найти по результатам измерений при R = const двух эталонов, а влияние Z3 устранить по результату измерения импеданса ячейки при разомкнутых зажимах ХТ6 и ХТ7, т.е. в режиме холостого хода (ХХ). Но в действительности расчет Zх по $Z_{{\text{x}}}^{'}$ осуществляется не по формуле (3), а с применением А-параметров четырехполюсника, которому уподобляется цепь измеряемого объекта. Для их определения выполняются три дополнительных измерения: в режимах КЗ и ХХ и с эталоном [8, pp. 72, 75, 76, 146−149]. Сама расчетная формула имеет вид
(4)
${{Z}_{{\text{х}}}} = \frac{{({{Z}_{{{\text{кз}}}}} - Z_{{\text{х}}}^{{\text{'}}})(Z_{{\text{э}}}^{{\text{'}}} - {{Z}_{{{\text{хх}}}}})}}{{(Z_{{\text{х}}}^{{\text{'}}} - {{Z}_{{{\text{хх}}}}})({{Z}_{{{\text{кз}}}}} - Z_{{\text{э}}}^{{\text{'}}})}}{{Z}_{{\text{э}}}}$,Расчет предполагает отсутствие потерь энергии в кабелях, т.е. достаточную точность выполнения равенства αl ≃ 0, причем расчету предшествует коррекция электрической длины линии [8, pp. 38, 82, 150, 151]. Поэтому применяются специальные линии из кабелей, имеющих, с одной стороны, малые потери, а с другой – известные длину и фазовые постоянные [8, pp. 57, 58]. Следует отметить, что с позиций схемы (рис. 1) и формулы (3) необходимость измерения в режиме КЗ представляется сомнительной. Действительно, в этом случае ∆U = ∆U ' = 0 и Zкз = 0, и, таким образом, это измерение не дает никакой информации о цепи измеряемого объекта. К сожалению, какие-либо пояснения на этот счет в работах [8, 14] отсутствуют.
Согласно уравнению (3), модуль измеренного импеданса при αl ≃ 0 определяется выражением
(5)
${\text{|}}Z_{{\text{х}}}^{'}{\text{|}} = \frac{{{\text{|}}{{Z}_{{\text{х}}}}{\text{|}}}}{{\sqrt {{\text{co}}{{{\text{s}}}^{2}}({{\beta }}l) + {{{\left( {\frac{\rho }{R}{\text{sin}}({{\beta }}l)} \right)}}^{2}}} }}$.Из него следует, что при R ≪ ρ второе слагаемое подкоренного выражения знаменателя может быть значительно больше единицы, в особенности при βl → 90°, т.е. при l → λк/4. Связанные с этим существенные падения чувствительности по ${\text{|}}Z_{{\text{x}}}^{'}{\text{|}}$ и, следовательно, точности измерения этого параметра делают практически невозможными измерения относительно малых величин ${\text{|}}Z_{{\text{x}}}^{'}{\text{|}}$ в непрерывном частотном диапазоне. Данное обстоятельство объясняется тем, что согласование кабеля Сb4 обеспечивается только при выполнении с необходимым запасом неравенства R > ρ, а это имеет место лишь при достаточно больших величинах ${\text{|}}Z_{{\text{x}}}^{'}{\text{|}}$ и, соответственно, R.
Сопротивление согласующего резистора на выходе генератора G1 не входит в уравнение (2). Но из-за него ∆U ' существенно меньше по сравнению с U: при ${\text{|}}Z_{{\text{x}}}^{'}{\text{|}}$ > ρ имеет место уменьшение, как минимум, вдвое, а при Zх ≲ ρ оно может превышать порядок величины. Поэтому для обеспечения необходимого значения ∆U ' генератор должен иметь достаточный запас по U. Импеданс Z1, модуль которого не меньше ρ, дополнительно нагружает генератор, но при достаточно малом выходном сопротивлении последнего его влиянием можно пренебречь. Шунтирование входа усилителя А импедансом Z2 не нарушает указанного уравнения, если усиление намного (желательно, до 3–4 порядков величины) превышает отношение R/|Z2| (наименьшее значение |Z2| = ρ/2). При этом величина усиления существенно больше той, которая обеспечивает справедливость формулы (1).
Коррекция электрической длины линии, будучи, в сущности, “расчетной” операцией, не избавляет от реального фазового сдвига Zос относительно R, что может привести к самовозбуждению усилителя и, как следствие, к потере работоспособности всего устройства. Во избежание этого в петлю обратной связи посредством фазовращателя ЕР вводится компенсирующий фазовый сдвиг ∆φ. Он вычисляется по данным отдельного измерения характеристик этой петли, выполняемого в отсутствие измеряемого объекта при ∆φ = 0 и КЗ зажимов ХТ7, ХТ8 с применением генератора G2 (с тем же частотным диапазоном, что и у G1) и векторного вольтметра PV3, коммутируемых элементом SA [14, р. 8]. При собственно импедансных измерениях G2 и PV3 не используются.
Для запоминания результатов измерений и предварительных настроек, выполнения расчета по этим результатам значений ∆φ и Zx, введения первого в петлю обратной связи и выведения второго на индикатор, а также для управления процессами измерения, расчета и т.д. в импедансметре имеется специальный блок, который может быть назван вычислительным. Он, по соображениям упрощения схемы, на рис. 1 не показан, тем более что его схемные особенности, в отличие от выполняемых им функций, принципиального значения не имеют.
Из вышеизложенного следует, что для реализации указанных выше достоинств АБМ в устройстве по схеме на рис. 1 кабели соединительной линии должны с достаточной точностью удовлетворять условию αl ≃ 0. Это серьезно ограничивает предельную длину соединительной линии при выбранной частоте измерений и верхнюю частоту при выбранной длине линии. Даже у “фирменных” линий длина не превышает 2 м. Для линий же из кабелей обычного качества ситуация еще хуже. Так, согласно расчету, при допустимых потерях 3% кабели марок РК50-4-11 ГОСТ 11326.3-79 и РК75-4-11 ГОСТ 11326.8-79 на частоте 100 МГц могут иметь длину не более 1.4 м. При тех же допустимых потерях длина линии из этих кабелей может быть равной 3 м только до 67 МГц.
Налицо также и повышенная сложность такого устройства и его практического применения. Она обусловлена в основном:
а) большим количеством (по четыре) кабелей в соединительной линии, зажимов у АБМ, измерительной ячейки и согласующих резисторов;
б) необходимостью в средствах для определения характеристик петли обратной связи и введения в нее фазовой поправки, обеспечивающей стабильность усилителя;
в) значительным числом операций (компенсация электрической длины, основное и три дополнительных измерения, определение и введение упомянутой фазовой поправки), необходимых для сохранения работоспособности устройства и исключения параметров линии из результата определения Zх;
г) сложностью вычислительного блока, в первую очередь, из-за принятого способа нейтрализации влияния соединительной линии с применением формулы (4);
д) потребностью (из-за использования 4ТР-конфигурации цепи измеряемого объекта) в изолированных друг от друга источниках питания для всех трех узлов АБМ.
Кроме того, у такого устройства, согласно уравнению (5), возможность измерений в непрерывном частотном диапазоне распространяется только на относительно большие значения ${\text{|}}Z_{{\text{x}}}^{'}{\text{|}}$, для которых требуется выполнение условия R > ρ, а необходимость использования фактически только “фирменных” соединительных линий явно сужает их выбор и создает очевидные неудобства для пользователей. Упомянутая же невозможность заземления общих точек всех узлов АБМ и экранов всех кабелей определенно снижает устойчивость измерителя к действию внешних электромагнитных помех и усложняет ее обеспечение.
С учетом изложенного следует признать, что рассмотренное устройство имеет довольно ограниченные возможности для дистанционных измерений с длинными соединительными линиями.
ИМПЕДАНСМЕТР ПО РАДИОЧАСТОТНОМУ МЕТОДУ ВОЛЬТМЕТРА–АМПЕРМЕТРА
Радиочастотный метод вольтметра–амперметра представляет собой модификацию метода вольтметра−амперметра для высокочастотных измерений импеданса. Он разработан достаточно давно (его первые реализации описаны еще в работах [15–18]), но и в дальнейшем не прекратилось его совершенствование, в том числе применительно к различным объектам измерения (см., например, [19, 20]). Общее описание метода имеется в справочнике [8], но его недостаточно для уяснения схемных особенностей соответствующих устройств при дистанционных измерениях. Такая информация, помимо работ [15–18], содержится в издании [21]. Она касается непосредственно достаточно старых моделей с частотным диапазоном до 1.8 ГГц, но справедлива в целом и для более новых приборов Е4982 и Е4991В (на частоты до 3 ГГц). Аналогичные сведения имеются и в патенте [22]. Согласно совокупности этих данных, такие измерители можно проиллюстрировать схемой, приведенной на рис. 2. Следует отметить, что эта схема является предельно упрощенным вариантом, но и более сложные решения сводятся в конечном счете к одной и той же базовой схеме [8, p. 25, fig. 2−4].
Рис. 2.
Схема дистанционного импедансметра по радиочастотному методу вольтметра–амперметра. G – генератор измерительного напряжения U; PV1 – вольтметр для измерения падения напряжения (U1) на измеряемом объекте; PV2 – векторный вольтметр для измерения напряжения (U2), пропорционального току через измеряемый объект (модуля и фазового сдвига относительно U1); XТ1−XТ3 – измерительные зажимы; XT4−XT6 и ХТ7, ХТ8 – соответственно входные и выходные зажимы измерительной головки; ХТ9, ХТ10 – зажимы измерительной ячейки; R0 – сопротивление согласующих резисторов; R' – сопротивление дополнительного резистора; Cb1−Cb3 – кабели для подключения выносной измерительной головки; Cb4 – кабель для подключения измерительной ячейки; SA – коммутирующий элемент; Zх – импеданс измеряемого объекта; Z1 – эквивалентный импеданс, отражающий шунтирование генератора измерительной цепью; Z3 – паразитный импеданс между зажимами ХТ9 и ХТ10.
На схеме (рис. 2) генератор G, вольтметры PV1, PV2, измерительные зажимы XT1−XT3 и резисторы сопротивлением R0 относятся к основной части измерителя; коммутирующий элемент SA, резистор сопротивлением R', зажимы XT4−XT8 и кабели Cb1−Cb3 – к выносной измерительной головке и ее соединению с основной частью; а кабель Cb4, зажимы XT9, XT10 и измеряемый объект Zх – к собственно цепи этого объекта. Кабели Cb1−Cb3 одинаковы, их волновое сопротивление ρ = R0. Сопротивление R' тоже равно R0. Волновое сопротивление кабеля Cb4 может быть любым, в том числе и равным R0. В принципе, измеряемый объект можно подключить к зажимам ХТ7, ХТ8 и непосредственно, но тогда испытательные факторы, воздействующие на него, будут влиять и на измерительную головку, что не всегда допустимо. Общая точка вольтметра PV2 может быть соединена с общей заземляемой точкой измерителя. Для этого подключение кабеля Cb3 к зажиму ХТ6 должно быть выполнено через балун – согласующий элемент на трансформаторе с ферритовым сердечником, тоже находящийся в измерительной головке. Соединительная линия здесь, как видно из рис. 2, состоит в общем случае из двух частей, разделенных этой головкой.
Коммутирующий элемент SA служит для изменения измерительной схемы в зависимости от соотношения между |Zх| и R0 с целью сохранения приемлемой точности измерения во всем диапазоне значений |Zх|. В разомкнутом его положении измеряется |Zх| ≤ R0, а в замкнутом – |Zх| ≥ R0. В отсутствие кабелей Cb1–Cb4 (и при |Z3| ≫ |Zх|) искомый импеданс Zх равен измеряемому $Z_{{\text{х}}}^{'}$ и описывается формулами [8, p. 25]:
− при |Zх| ≤ R0
(6)
${{Z}_{{\text{х}}}} = Z_{{\text{х}}}^{'} = \frac{{2{{R}_{0}}}}{{\frac{{{{U}_{2}}}}{{{{U}_{1}}}} - 1}}$− и при |Zх| ≥ R0
(7)
${{Z}_{{\text{х}}}} = Z_{{\text{х}}}^{'} = \frac{{{{R}_{0}}}}{2}\left( {\frac{{{{U}_{1}}}}{{{{U}_{2}}}} - 1} \right)$.При наличии кабелей Cb1−Cb3 фазовые сдвиги и потери энергии в первом из них роли не играют, а в остальных одинаково изменяют показания вольтметров PV1 и PV2 по сравнению с напряжениями на выходах этих кабелей. При этом отношения тех и других остаются равными друг другу, так что уравнения (6) и (7) по-прежнему выполняются. Длина кабелей Cb1–Cb3 формально не ограничена, но, видимо, из-за того что с ее увеличением, как правило, растут неидентичность и неоднородность кабелей, устанавливается ее определенная величина [8, p. 67]. К примеру, согласно работе [18], она не превышает 2 м. При наличии также и кабеля Cb4 равенство Zх = $Z_{{\text{х}}}^{'}$ не выполняется. Связь между Zх $Z_{{\text{х}}}^{'}$, т.е. между нагрузкой и входным импедансом кабеля, имеет вид
(8)
${{Z}_{{\text{х}}}} = \rho \frac{{Z_{{\text{х}}}^{'} - \rho {\text{th}}({{\gamma }}l)}}{{\rho - Z_{{\text{х}}}^{'}{\text{th}}({{\gamma }}l)}}~,$Ситуация дополнительно усложняется в частотном диапазоне ≳300 МГц, когда и сама измерительная ячейка начинает вести себя как система с распределенными постоянными. Действие этого фактора удается существенно уменьшить только благодаря рациональной конструкции ячейки. “Шунт” Z1, как и в устройстве на рис. 1, дополнительно нагружает генератор и требует снижения его выходного сопротивления. На уравнениях (7) и (8) он не отражается.
Влияние каскадного соединения “Cb4–ячейка” вместе с погрешностями от некоторой неидентичности и несогласованности Cb2 и Cb3 устраняются расчетным путем по результатам калибровки, выполняемой на зажимах ХТ9 и ХТ10. Аналогично компенсации в измерителе на основе АБМ (рис. 1), проводятся измерения в режимах ХХ и КЗ и с эталонной нагрузкой [8, pp. 71, 85, 86]. При этом для повышения точности измерения малых активных компонентов Zх требуется еще и эталон в виде конденсатора с малыми диэлектрическими потерями. Перед калибровкой выполняется компенсация электрической длины упомянутого соединения [8, pp. 68, 77, 78, 91, 92, 150, 151], а сам расчет, как и в устройстве на рис. 1, базируется на практическом отсутствии потерь энергии в нем. Соблюдение этого требования позволяет преобразовать связь Zх ($Z_{{\text{х}}}^{'}$) по уравнению (8) к более простому виду:
Описанный импедансметр превосходит рассмотренное выше устройство на основе АБМ по верхней рабочей частоте и имеет достаточно широкий диапазон измеряемых величин при сопоставимых расстояниях между средством измерений и измеряемым объектом. Однако у него значительно (на порядок величины) бóльшая погрешность измерения, а сам измерительный процесс с его использованием заметно сложнее, поскольку упомянутая калибровка необходима не только после включения питания, но и после каждого изменения частоты. Поэтому и данный импедансметр не может обеспечить сколько-нибудь кардинального решения вопроса дистанционных измерений импеданса с длинными соединительными линиями.
ИМПЕДАНСМЕТРЫ НА ОСНОВЕ ТРЕХ- И ДВУХЗАЖИМНОГО АБМ
Изучение схемных особенностей измерителя импеданса с четырехзажимным АБМ и четырехкабельной соединительной линией (см. рис. 1), как и особенностей его применения и принятого в нем способа исключения параметров линии из результатов измерения, показало, что его главные недостатки обусловлены в основном использованием 4ТР-соединения за пределами частотного диапазона, в котором еще могут быть реализованы его преимущества. В связи с этим были проанализированы принципиальные возможности измерителей, получающихся из такого устройства с сохранением в качестве их основы АБМ (и свойственных ему достоинств), но при отказе от включения кабелей в петлю обратной связи усилителя и уменьшении до трех и двух измерительных зажимов у АБМ и кабелей в соединительной линии. Полученные результаты изложены ниже, схемы устройств приведены на рис. 3 и 4.
Рис. 3.
Схема дистанционного импедансметра с трехзажимным АБМ. G – генератор измерительного напряжения U; Z – эквивалентный импеданс между зажимом ХТ6 и входом усилителя А. Остальные узлы и элементы аналогичны узлам и элементам схемы на рис. 1 с теми же обозначениями.

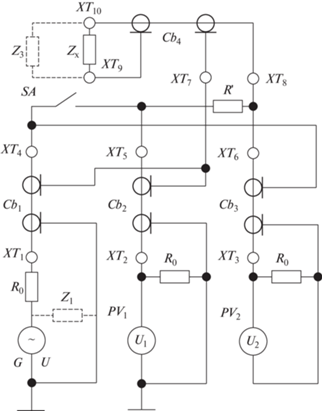
Рис. 4.
Схема дистанционного импедансметра с двухзажимным АБМ. PV1 – вольтметр для измерения напряжения U; PV2 – векторный вольтметр для измерения модуля и фазового сдвига Uх относительно U; $Z_{{\text{х}}}^{'}$ − эквивалентный входной импеданс соединительной линии, нагруженной измеряемым объектом. Остальные узлы и элементы аналогичны узлам и элементам схемы на рис. 3 с теми же обозначениями.

Схема на рис. 3 относится к импедансметру на основе трехзажимного АБМ. От схемы на рис. 1 она отличается отсутствием измерительного зажима ХТ4 и соединенных с ним кабеля Cb4 и согласующего резистора, зажимов ХТ5 и ХТ8 у измерительной ячейки, фазовращателя ЕР в петле обратной связи усилителя, вспомогательных генератора G2 и векторного вольтметра PV3 и коммутирующего их элемента SA, наличием у ячейки экрана Sc и подключением резистора сопротивлением R ко входу усилителя, а согласующего резистора кабеля Cb3 – между этим входом и зажимом ХТ3. Экраны кабелей, подобно тому, как это сделано на рис. 1 (и с аналогичной целью), соединены между собой на выходе линии и изолированы друг от друга на ее входе. И это также не позволяет соединить общие точки всех узлов АБМ и экраны всех кабелей с общей, заземляемой, точкой измерителя. На схеме показано такое соединение для общей точки преобразователя “ток−напряжение” и экрана кабеля Cb3. Электрический экран ячейки Sc, подключенный к упомянутому соединению экранов кабелей, позволяет избавиться от влияния на результаты измерений паразитного импеданса между зажимами ХТ6 и ХТ7. Кабели Cb1–Cb3 одинаковы, сопротивление R0 согласующих резисторов равно их волновому сопротивлению ρ. Вычислительный блок, как и на рис. 1 и 2, не показан. Узлы и элементы G, PV1, PV2, A, XT1–XT3, R и R0 входят в АБМ, причем А, PV2 и R составляют упомянутый преобразователь, а остальные элементы входят в цепь измеряемого объекта. К последней, как и в устройстве на рис. 1, фактически относятся и резисторы сопротивлением R0, формально входящие в АБМ.
Выражение для импеданса Z, по аналогии с формулой (2), имеет вид
Его отличие от уравнения (1) вызвано влиянием кабелей Cb2 и Cb3. Связь ∆U'(∆U) та же, что и в устройстве на рис. 1, а влиянием кабеля Cb1 также можно пренебречь. Величина Z, подобно Zос на рис. 1, равна параметру В четырехполюсника, эквивалентного каскадному соединению, в данном случае “Zх–Cb3–R0”. Матрица его А-параметров равна произведению
С учетом этого Z = (Zх + ρ)(sh(γl) + ch(γl)). После подстановки выражений для ∆U' и Z в формулу (9) получим
где $Z_{{\text{х}}}^{'}$, как и прежде, описывается уравнением (1).В общем виде уравнение (10) можно представить, как и для устройств [5, 6], в виде
где K и М – параметры соединительной линии. Уравнение (11) явно проще уравнения (3), в том числе и ввиду отсутствия зависимости от поддиапазона измерения.Из-за реальных неидентичности кабелей Cb2 и Cb3 и их не совсем полной согласованности равенства К = 1 и М = ρ приблизительны и необходимо экспериментальное определение этих величин. Для этого достаточно двух измерений: при КЗ зажимов ХТ6, ХТ7 и при подключении к ним эталона с импедансом Zэ. Первое измерение дает непосредственно параметр М, а второе, согласно уравнению (11), − величину
где $Z_{{\text{э}}}^{'}$ – измеренный импеданс эталона.Определив отсюда К и подставив его в формулу (11), получим формулу для расчета Zх по $Z_{{\text{х}}}^{'}$:
(12)
${{Z}_{{\text{х}}}} = \frac{{Z_{{\text{х}}}^{'} - M}}{{Z_{{\text{э}}}^{'} - M}}{{Z}_{{\text{э}}}}$.Эквивалентные импедансы Z1 и Z2 не влияют на уравнение (12). При одинаковых с устройством на рис. 1 кабелях импеданс Z1 вызывает практически такое же шунтирование выхода генератора, а шунтирующее действие Z2 на вход усилителя приблизительно вдвое слабее (что соответственно снижает требования к усилению).
У такого измерителя, по сравнению с устройством по схеме на рис. 1, имеется ряд существенных преимуществ. У него нет ограничений по верхней измерительной частоте при выбранной длине соединительной линии или по предельной длине линии при выбранной частоте. Он заметно проще ввиду меньшего количества зажимов, кабелей и согласующих резисторов и, в особенности, отсутствия средств для определения и введения в петлю обратной связи компенсирующего фазового сдвига. Значительно проще и вычислительный блок, поскольку от него требуется запоминание меньшего числа данных, а расчет по формуле (12) явно проще описанной выше и аналогичной по назначению процедуры, базирующейся на использовании формулы (4). Проще и сам измерительный процесс из-за меньшего числа измерений и ненужности коррекции электрической длины линии. Наконец, к кабелям не предъявляются повышенные требования по затуханию, что значительно расширяет выбор соединительных линий. А поскольку невозможность соединения экранов с общей заземляемой точкой измерителя здесь относится к меньшему (на один) количеству кабелей, устойчивость к внешним помехам несколько выше.
Как видно из уравнений (10) и (11), неравенства |K| ≠ 0 и |М| ≠ ∞ выполняются всегда, т.е. при любом соотношении “частота−длина линии” сохраняются достаточная чувствительность по ${\text{|}}Z_{{\text{х}}}^{'}{\text{|}}$ и точность его измерения. В то же время ввиду выполнения неравенств |Z1| ≥ ρ и |Z2| ≥ ρ никогда не происходит препятствующего нормальной работе замыкания цепью измеряемого объекта выхода генератора и/или входа усилителя. Так что возможность выполнения измерений в непрерывном частотном диапазоне, в отличие от измерителя по схеме на рис. 1, распространяется на весь диапазон ${\text{|}}Z_{{\text{х}}}^{'}{\text{|}}$. Это обусловлено хорошим согласованием кабеля Cb3 за счет включения согласующего резистора по схеме на рис. 3 и практически нулевого входного сопротивления преобразователя.
Схема на рис. 4 иллюстрирует измерительное устройство на основе двухзажимного АБМ. От предыдущей схемы она отличается отсутствием зажима ХТ2, кабеля Cb2 и его согласующего резистора и подключением вольтметра PV1 непосредственно к генератору G. Как и на рис. 3, кабели имеют одинаковое волновое сопротивление ρ и R0 = ρ. Граница между АБМ и цепью измеряемого объекта также проходит по измерительным зажимам, и также резисторы сопротивлением R0 фактически относятся к этой цепи. Аналогично схеме на рис. 3, экраны кабелей на входе линии изолированы друг от друга, а на ее выходе соединены между собой и к этому соединению подключен экран Sc измерительной ячейки. С общей, заземляемой, точкой устройства, как и на рис. 3, соединены общая точка преобразователя “ток–напряжение” и экран кабеля Cb3. На схеме, помимо Z1 и Z2, изображен и эквивалентный импеданс $Z_{{\text{х}}}^{'}$, являющийся входным импедансом цепи измеряемого объекта Zх и одновременно измеряемым импедансом данного устройства. Вычислительный блок, как и на рис. 1−3, не показан.
Для этой схемы уравнение, аналогичное уравнению (1), имеет вид
где $Z_{{\text{х}}}^{'}$ равен параметру В четырехполюсника, эквивалентного соединению “R0–Cb1–Zx–Cb3–R0”, с матрицей А-параметров, равной произведениюОтсюда
(14)
$Z_{{\text{х}}}^{'} = ({{Z}_{{\text{х}}}} + 2\rho ){{({\text{sh}}({{\gamma }}l) + {\text{ch}}({{\gamma }}l))}^{2}}$,Из уравнения (14) видно, что $Z_{{\text{х}}}^{'}$ отличается от Zх больше, чем в устройстве на рис. 3, причем это отличие за счет второго сомножителя в правой части уравнения с ростом l нарастает. Это требует заметного расширения пределов измерения устройства по сравнению с диапазоном возможного изменения Zх. Например, при увеличении до 50 м длины линии упомянутых кабелей модуль названного сомножителя на частоте 100 МГц возрастает примерно до 3.3. Его фаза по мере увеличения l изменяется в пределах ±180° (у самого Zх она, естественно, ограничена величиной ±90°).
Указанное обстоятельство является определенным недостатком данного измерителя по сравнению с импедансметром, схема которого представлена на рис. 3. Но он явно проще, и, кроме того, уменьшение до двух количества кабелей несколько увеличивает его устойчивость к внешним электромагнитным помехам. Поэтому в ряде случаев он может оказаться более предпочтительным. В нем тоже используется расчетная формула (12) и выполняются условия |K| ≠ 0, |М| ≠ ∞, |Z1| ≥ ρ и |Z2| ≥ ρ, обеспечивающие возможность измерений в непрерывном диапазоне частот. Перед импедансметром на рис. 1 он, в части соотношения “длина линии–частота”, возможности использования кабелей с “обычным” затуханием и простоты процессов измерения и вычисления, имеет такие же, в общем, преимущества, что и устройство на рис. 3. В части же количества кабелей, согласующих резисторов и зажимов АБМ и измерительной ячейки его преимущества еще больше.
При отсутствии согласующих резисторов в схеме на рис. 4 (как в устройствах [5, 6]) цепь измеряемого объекта сокращается до соединения “Cb1–Zx–Cb3”, а из матричного произведения, равного матрице А-параметров эквивалентного ей четырехполюсника, исчезают первый и последний сомножители. В результате получается
В то же время с учетом равенства параметров А и D этого четырехполюсника имеем
Видно, что при длине линии, близкой к нечетному числу λк/4, значения |K|, |Z1| и |Z2| стремятся к минимумам, тем меньше отличающимся от нуля, чем меньше αl. Поэтому, хотя |М| ≠ ∞, измерения в непрерывном частотном диапазоне невозможны.
У цепей измеряемого объекта обоих устройств (рис. 3 и 4) собственная верхняя рабочая частота реально находится в начале области, где в систему с распределенными постоянными превращается сам этот объект; к примеру, для диэлектрических образцов она обычно составляет несколько сотен мегагерц. При этом критическая частота кабелей, как правило, превышающая 10 ГГц, лимитирующим фактором не является. Следовательно, имеется резерв для увеличения хотя бы в 2–3 раза верхней рабочей частоты такого измерителя по сравнению с существующими средствами измерений на основе АБМ (у них эта частота, как упоминалось, лишь немного больше 100 МГц). Возможность такого увеличения обеспечивается использованием более простого и устойчивого усилителя, имеющего несколько меньшее усиление и, главное, не содержащего кабелей в петле обратной связи. При этом такой измеритель сблизится по диапазону частот с импедансметром по радиочастотному методу вольтметра−амперметра и, в силу своей более высокой точности, сможет его заменить.
Создание подобного средства измерений при нынешнем уровне техники измерения импеданса вряд ли встретит принципиальные трудности, тем более, что оно будет явно проще существующих средств на основе АБМ. При этом их тоже можно приспособить и для недистанционных измерений. Для этого следует предусмотреть возможность исключения согласующих резисторов, например, путем их одновременного КЗ. Величины K и М при этом будут определяться паразитными параметрами внутренних соединений устройства, и при рациональной конструкции последних легко обеспечить высокую точность выполнения равенств K ≃ 1 и М ≃ 0.
В завершение данного раздела следует вкратце остановиться на практических аспектах применения таких средств измерений, которые будут в той или иной степени отличаться от практики применения импедансметра по схеме на рис. 1. Для защиты от внешних электромагнитных помех заземлять предпочтительнее общую точку устройства, выбранную в соответствии с рис. 3 и 4. При этом защита соединительной линии может быть выполнена дополнительным заземленным экраном для устройства на рис. 3 и максимальным сближением кабелей (вплоть до использования двойного коаксиального кабеля) в устройстве на рис. 4. Для выполнения необходимых переключений на выходе соединительной линии следует предусмотреть (лучше в общей конструкции с измерительной ячейкой) трехпозиционный коммутатор и эталон. Наиболее подходят для этого маломощный низковольтный контактный коммутатор с электромагнитным управлением по цепи, входящей вместе с кабельной линией в соединение средства измерений с измеряемым объектом, и сравнительно низкоомный (50−100 Ом) высокочастотный резистор, сопротивление которого относительно стабильно и, при необходимости, может быть проконтролировано на постоянном токе или низкой частоте. Соединительная линия может состоять из двух и более частей, но кабели тех из них, которые сами по себе являются длинными линиями, должны иметь волновые сопротивления, одинаковые и равные R0. При этом части, подвергающиеся воздействию испытательных факторов, желательно, выполнять кабелями с повышенной стойкостью к этим воздействиям. Если же, тем не менее, равенство ρ = R0 у них существенно нарушается, теряется возможность измерений на некоторых участках частотного диапазона. Однако на других частотах это не препятствует определению описанным способом величин $Z_{{\text{э}}}^{'}$ и М и применению формулы (12).
ЗАКЛЮЧЕНИЕ
Проведенный в данной работе анализ показал, что созданные к настоящему времени изобретения пригодны, в лучшем случае, для решения сравнительно узких задач в области дистанционного измерения импеданса с длинными соединительными линиями, причем по большей части без автоматизации измерений и использования средств вычислительной техники. Достаточно ограниченные возможности в этом отношении, судя по продукции фирмы Keysight Technologies, имеют и современные измерители импеданса, и векторные анализаторы цепей. И только применение устройств с измерительной частью, выполненной по схемам на рис. 3 и 4, являющимся, по сути, модификациями схемы на рис. 1, позволяет, как минимум, приблизиться к кардинальному решению. К тому же у таких устройств имеется потенциальная возможность заметного расширения частотного диапазона выше 100 МГц. А отмеченные качественные различия измерителей, выполненных по схеме на рис. 1 и по схемам на рис. 3, 4 и реализующих один и тот же метод АБМ, подтверждают обоснованность сделанного при анализе выбора в пользу сопоставления именно измерительных устройств, а не методов измерения.
Современные импедансметры на основе АБМ обычно допускают трех- и двухкабельное подключение измеряемого объекта, но имеют жесткое программное обеспечение. Поэтому при дистанционных измерениях их можно использовать разве что в качестве собственно измерителей, с применением для обработки результатов измерений сторонних вычислительных средств. Кстати, именно таким путем, с использованием LCR-метра WK 6510P фирмы Wayne Kerr Electronics (Англия), проверены на частотах до 10 МГц справедливость выражений (10) и (11) и корректность формулы (12).
Необходимо отметить, что результаты анализа импедансметров Keysight Technologies могут оказаться не совсем правильными в отношении аналогичной продукции других фирм, для которой информационные материалы типа [8, 14, 21] в открытом доступе отсутствуют. Но для приборов с одинаковой измерительной основой в главном они, скорее всего, будут совпадать.
Список литературы
Дульбеев В.А. А.с. № 332392 СССР. МПК G01R 27/26, 27/00 // Опубл. 28.04.1972. Бюл. № 10.
Дульбеев В.А. Патент на изобретение № 2168731 РФ. МПК G01R 27/26 // Опубл. 10.06.2001. Бюл. № 16.
Матис И.Г., Клотинь Э.Э., Бергманис К.А. А.с. № 256853 СССР. МПК G01R 27/02 // Опубл. 11.11.1969. Бюл. № 35.
Зуев В.С., Гусев В.И., Глушаченко Е.А. А.с. № 324582 СССР. МПК G01R 17/10 // Опубл. 1972. Бюл. № 2.
Кандыбко А.М. А.с. № 497527 СССР. МПК G01R 27/02 // Опубл. 30.12.1975. Бюл. № 48.
Кандыбко А.М. А.с. № 676946 СССР. МПК G01R 27/02 // Опубл. 30.07.1979. Бюл. № 28.
Muchiyev S.G., Tang Y.S., Zhang C.C. Patent for invention 11029348 USA. IPC G01R 27/16, G11B5/48 // Date of patent: Jun. 8, 2021.
Impedance measurement handbook. A guide to measurement technology and techniques. Application note 5950−3000. 6 th edition. Keysight Technologies. 2020, July 10. http://www.datatec.de.
Бандак М.И., Гиренко А.С., Архипов А.И., Папинов В.Н. А.с. № 1583873 СССР. МПК G01R 27/26 // Опубл. 07.08.1990. Бюл. № 29.
Impedance measurement handbook. User`s guide. 1st edition. Hioki EE Corporation. 2018. http://www.hioki.cn/skeditior_assets.
Barrettino D. // IEEE International Instrumentation and Measurement Technology Conference (12MTC). 2018. P. 359. https://doi.org/10.1109/ 12 MTC. 2018. 8409789
Shirakawa T., Sakai R., Nakatake S. // IEEE 61st International Midnest Symposium on Circuits and Systems (MWSCAS). 2019. P. 262. https://doi.org/10.1109/MWSCAS. 2018. 84409789
Khoma Y., Khoma V., Podpora M., Kawala-Sternik A., Martinek R., Ozana S. // IEEE Access. 2020. V. 8. P. 165307. https://doi.org/10.1109/ACCESS.2020.3022163
Agilent PN 4294A. New technologies for accurate impedance measurement (40 Hz to 110 MHz). Product Note 5968−4506 E. Agilent technologies. 2018. November. 20. http://literature.cdn.Keysight.com
Yokoshima I. // IEEE Transactions on Instrumentation and Measurement. 1993. V. 42. № 2. P. 524. https://doi.org/10.1109/19.278616
Yonekura T., Jansons M. // Proc. of CARTS EUROPE. 1993. P. 44.
Yonekura T. // Proc. of the 1994 IEEE Instrumentation and Measurement Technology Conference. Shisuoka, Japan. May 1994. P. 1004.
Yonekura T. // Hewlett-Packard Journal. Oct. 1994. V. 45. № 5. P. 67.
Pešovský M., Galayda P., Sokol M., Slovác S. // 19th International Radar Symposium (IRS). IEEE. 2018. P. 704. https://doi.org/10.23919/IRS. 2018.8448066
Press A.F., Goeckner M.J., Overzet L.J. // Journal of Vacuum Science and Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena. 2019. V. 37. № 6. P. 062926. https://doi.org/10.1116/1.5132753
Agilent PN 4291-1. New technologies for wide impedance range measurements to 1,8 GHz. Product note 5966-2046E. Agilent technologies. 2000. http://literature.cdn.keysight.com
Wakamatsu H. Patent for invention 5345182 USA. IPC G01R 27/28 // Date of patent: Sep. 6, 1994.
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента