

Приборы и техника эксперимента, 2022, № 5, стр. 5-30
СОВРЕМЕННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ЧАСТОТНОГО СДВИГА РАССЕЯНИЯ МАНДЕЛЬШТАМА–БРИЛЛЮЭНА В ВОЛОКОННО-ОПТИЧЕСКОЙ МЕТРОЛОГИИ И СЕНСОРИКЕ (обзор)
А. И. Кривошеев a, *, Ф. Л. Барков a, Ю. А. Константинов a, М. Е. Белокрылов a
a Пермский федеральный исследовательский центр УрО РАН
614990 Пермь, ул. Ленина, 13а, Россия
* E-mail: antokri@ya.ru
Поступила в редакцию 28.03.2022
После доработки 05.05.2022
Принята к публикации 11.05.2022
- EDN: CVROCA
- DOI: 10.31857/S0032816222050275
Аннотация
Дан обзор современных программных и аппаратных методов детектирования частотного сдвига спектра вынужденного и спонтанного рассеяния Мандельштама–Бриллюэна для нужд отрасли распределенных волоконно-оптических датчиков и волоконно-оптической метрологии. Представлены актуальные подходы зондирования оптических волокон и детектирования сигнала. Описаны методы цифровой фильтрации, обеспечивающие увеличение отношения сигнал/шум спектра. Проведен обзор методов аппроксимации спектра лоренцевой функцией (Lorentzian curve fitting), корреляционных методов, методов искусственного интеллекта и машинного обучения.
1. ВВЕДЕНИЕ В ТЕХНИЧЕСКИЕ ОСНОВЫ РЕГИСТРАЦИИ СПЕКТРОВ РАССЕЯНИЯ МАНДЕЛЬШТАМА–БРИЛЛЮЭНА В ОПТИЧЕСКИХ ВОЛОКНАХ
Методы волоконно-оптической метрологии и сенсорики нашли широкое применение в науке и технике [1–5]. Заслуживающими особое внимание являются методы оптической рефлектометрии, позволяющие получать информацию о свойствах волокна и воздействиях на него практически в каждой его точке [6–13].
Одними из самых перспективных направлений оптической рефлектометрии являются распределенные методы исследования на основе спонтанного и вынужденного рассеяния Мандельштама–Бриллюэна (РМБ). Устройства, работающие на первом принципе, называются бриллюэновскими рефлектометрами (Brillouin optical time domain reflectometer – BOTDR), на втором – анализаторами (Brillouin optical time domain analyzer – BOTDA). Принцип их функционирования показан на рис. 1 [14].
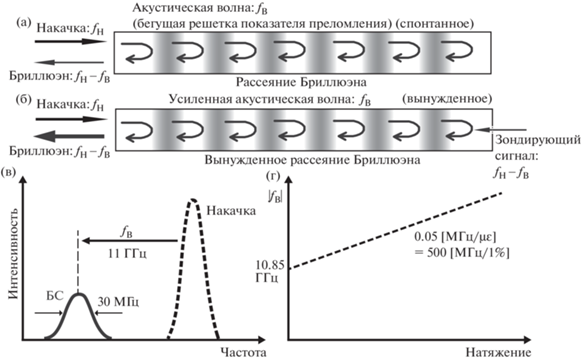
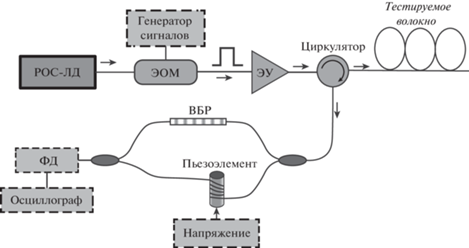
В системах BOTDA электромагнитная волна достаточной мощности, введенная в оптическое волокно, при помощи явления электрострикции порождает акустический фонон, частота которого зависит от свойств материала, а также от механических напряжений в нем и температуры окружающей его среды или объекта, где проложено оптическое волокно. Для обеспечения бриллюэновского усиления необходимо, чтобы оптический сигнал шел в световоде навстречу сигналу накачки, а ширина линии источника зондирующего излучения и источника накачки была меньше ширины линии бриллюэновского усиления (между 30 и 50 МГц). Самое большое усиление обеспечивается, когда частота зондирующего оптического сигнала fc совпадает с частотой стоксовой компоненты (fн – fb) в спектре усиления Мандельштама–Бриллюэна (Brillouin Gain Spectrum – BGS). Импульсный режим накачки обеспечивает временную (пространственную) развертку бриллюэновского сдвига частоты (Brillouin Frequency Shift – BFS). При этом усиление сигнала происходит лишь в той области световода (сенсора), где в это время проходит импульс накачки. Основные физические принципы функционирования BOTDA- и BOTDR-систем превосходно изложены А.В. и В.Н. Листвиными в работе [15]. Упрощенный принцип BOTDA-метода показан на рис. 2.
Рис. 2.
Упрощенный принцип BOTDA-метода. Адаптировано из работы [15]. РОС-ЛД – лазерный диод с распределенной обратной связью, АОМ – акустооптический модулятор, ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, ФД – фотодетектор.
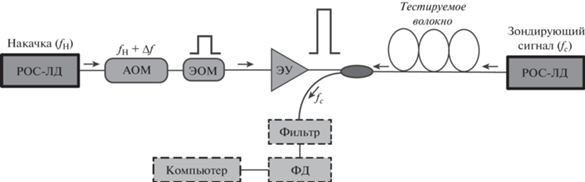
Согласно рис. 2, с одного торца световода вводится накачка частоты fн, а с противоположного торца поступает излучение зондирующего лазера с частотой fc. После прохода сигнала через акустооптический модулятор (АОМ) частота излучения накачки становится равной fн + Δf, где Δf – сдвиг по частоте, обеспечиваемый АОМ. Полученный сигнал накачки модулируется по амплитуде с помощью электрооптического модулятора (ЭОМ) и, далее, проходит через оптический эрбиевый усилитель (ЭУ) и поступает в световод (сенсор). Коэффициент бриллюэновского усиления зависит от совпадения или несовпадения состояний поляризации излучения накачки и сигнала. Его максимум обеспечивается, если эти состояния одинаковы в месте взаимодействия двух волн. В обычных телекоммуникационных световодах состояние поляризации может меняться неконтролируемым образом, что ведет к замираниям отклика фотодетектора. Во избежание данного явления перед оптическим усилителем устанавливается фарадеевский вращатель, периодически изменяющий состояние поляризации излучения. Существует иной подход – идущие навстречу сигналы линейно поляризуют [12, 16]. Как было отмечено выше, во встречном направлении в сенсорный световод подается зондирующее излучение частотой fc. Оно усиливается во время взаимодействия с сигналом накачки за счет эффекта стимулированного РМБ и, пройдя обратный путь по волокну, с помощью оптического циркулятора или делителя отправляется на вход фотодетектора. Узкополосный оптический фильтр, предшествующий фотодетектору, не пропускает в его сторону сигнал рэлеевского рассеяния. Смещение частоты Δf, создаваемое АОМ, изменяется дискретно с шагом, в разы меньшим ширины полосы РМБ. Для каждой частоты накачки fн + Δ f регистрируется бриллюэновская рефлектограмма, что позволяет получить трехмерное распределение спектра бриллюэновского усиления по длине сенсорного световода или исследуемого волокна.
Свою популярность также обрели BOTDA-системы, в которых излучение накачки не меняет своей частоты – перестраивается излучение зондирования [17]. Вне зависимости от того, как реализована система, далее полученный профиль используется для поиска частотной координаты максимума спектра, и в случае использования BOTDA как сенсорной системы рассчитывается распределение натяжения вдоль волокна. BOTDA широко используется при производстве оптических волокон, кабелей, катушек волоконно-оптических гироскопов при контроле натяжения волокон. К сожалению, метод BOTDA менее пригоден для исследования линий передачи, так как основанный на его принципах прибор требуется коммутировать с обоими торцами кабеля.
Однако фирмой Ando (Япония) был создан другой тип прибора для контроля натяжения волокна – BOTDR, который, как уже было отмечено выше, подключается только к одному торцу волокна (рис. 3). По своему принципу действия он во многом схож с BOTDA и отличается главным образом тем, что натяжение волокна находится по спектру спонтанного РМБ.

Спектр обратно рассеянной в сенсорном световоде волны содержит релеевскую компоненту (частота которой равна fн + df) и две бриллюэновские: стоксову (fн + df – fb) и антистоксову (fн + df + fb). Для детектирования искомой компоненты (обычно интерес представляет стоксова компонента как более мощная) применяется когерентный прием сигнала. Для этого часть излучения зондирующего лазера с распределенной обратной связью отправляется непосредственно на фотодетектор, где объединяется с излучением, рассеянным в световоде. BOTDA-системы зачастую более точны, чем системы BOTDR, однако последними, как уже говорилось выше, удобнее оперировать в полевых условиях. Оба прибора (BOTDA и BOTDR) используют хорошо известный один и тот же тип рассеяния – РМБ. Основные свойства бриллюэновского рассеяния в оптических волокнах определяются следующими выражениями [18]:
(1)
$\left( {\frac{1}{{{{v}_{g}}}}\frac{\partial }{{\partial t}} - \frac{\partial }{{\partial z}}} \right){{E}_{p}} = - \frac{{{\alpha }}}{2}{{E}_{p}} + i{{k}_{1}}{{\rho }}{{E}_{S}},$(2)
$\left( {\frac{1}{{{{v}_{g}}}}\frac{\partial }{{\partial t}} - \frac{\partial }{{\partial z}}} \right){{E}_{s}} = - \frac{\alpha }{2}{{E}_{s}} + i{{k}_{1}}{{\rho }}{{E}_{S}},$(3)
$\left( {\frac{\partial }{{\partial t}} + \frac{{{{{{\Gamma }}}_{{\text{в}}}}}}{2} + 2{{\pi }}i{{v}_{{\text{в}}}}} \right){{\rho }} = i{{k}_{2}}{{E}_{P}}E_{s}^{*} + N,$Если рассматривать спонтанное РМБ, то разумно предположить, что Es достаточно мало, так что второй член N доминирует в правой части уравнения (3). Напротив, первый член правой части того же уравнения преобладает в случае вынужденного рассеяния. Определим оптические мощности поля волны накачки и стоксовой (зондирующей) волны как Pp = |Ep|2 и Ps = |Es|2. Учитывая передачу мощности вынужденного РМБ между Pp и Ps с помощью акустической волны и акустооптического эффекта, уравнения (1)–(3) можно переписать следующим образом:
(4)
$\left( {\frac{1}{{{{v}_{g}}}}\frac{\partial }{{\partial t}} + \frac{\partial }{{\partial z}} + {{\alpha }}} \right){{P}_{p}} = - g(v){{P}_{p}}{{P}_{s}},$(5)
$\left( {\frac{1}{{{{v}_{g}}}}\frac{\partial }{{\partial t}} - \frac{\partial }{{\partial z}} + {{\alpha }}} \right){{P}_{s}} = + g(v){{P}_{p}}{{P}_{s}},$(6)
$\begin{gathered} g(v) = \mathop \sum \limits_j \left[ {\frac{{{{g}_{{{{B}_{0}}{{v}_{B}}{{\Delta }}{{v}_{B}}}}}}}{{A_{{ao}}^{{(j)}}~v_{{ac}}^{{(j)}}~{{\Delta }}v_{{ac}}^{{(j)}}}}} \right. \times \\ \left. { \times \frac{{{{{({{\Delta }}v_{{ac}}^{{(j)}}{\text{/}}2)}}^{2}}}}{{{{{[v - ({{v}_{0}} - v_{{ac}}^{{(j)}})]}}^{2}} + {{{({{\Delta }}v_{{ac}}^{{(j)}}{\text{/}}2)}}^{2}}}}} \right]. \\ \end{gathered} $Данное выражение характеризует BGS как сумму всех спектров усиления продольных акустических мод, соответствующих индексу j. В выражении (6) ${{\Delta }}{v}_{{ac}}^{{(j)}}$ – ширина линии j-го порядка или полная ширина на полувысоте (Full Width at Half Magnitude – FWHM), которую можно считать приблизительно одинаковой для всех акустических мод; $v_{{ac}}^{{(j)}}$ – эффективная скорость звука; $A_{{ao}}^{{(j)}}$, мкм2 – акустооптическая эффективная площадь j-го порядка; $v_{{ac}}^{{(j)}}$ и $A_{{ao}}^{{(j)}}$ качественно различаются для всех акустических мод.
Очевидно, что выражение $g(v)$ является суперпозицией функций Лоренца, максимум которой и требуется детектировать.
Детектированный максимум (в идеализированном случае для основной акустической моды j под номером 1) является функцией температур и деформаций, оказывающих влияние на волокно, и определяется как:
(7)
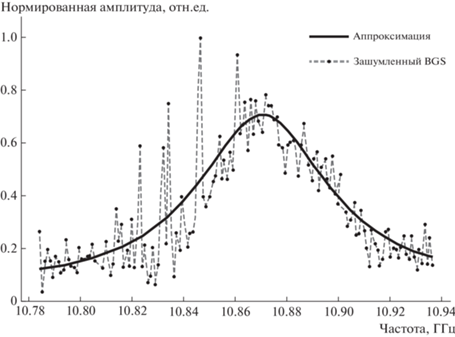
${{v}_{B}} = v_{{ac}}^{1} = 2{{n}_{{{\text{eff}}}}}{{V}_{{a~}}}{{\lambda }}_{0}^{{ - 1}} = F(T,~{{\sigma }}),$По такому принципу работает датчик физических величин. Но поскольку РМБ является сверхслабым, зачастую обратно рассеянные спектры в достаточной степени зашумлены (что видно из рис. 4), и регистрация их пиков тривиальным нахождением максимума возможна только с крайне высокой погрешностью. Стоит заметить, что точность детектирования пика в значительной степени определяет будущую точность всей системы в целом. Именно поэтому способам нахождения таких пиков в последнее время посвящено достаточно много научных работ по всему миру, а корректность и быстродействие самих методов стали предметами научной и технической конкуренции между исследовательскими группами.
Природу шумов в BGS прекрасно описали Javier Urricelqui, Marcelo A. Soto и Luc Thévenaz на “24th International Conference on Optical Fibre Sensors” [19]. Шумы BGS можно разбить на 3 группы.
1. Последствия многолучевого распространения волны (перерассеяние волны в разных точках волокна, в связи с чем эффект и получил название “двойное рэлеевское рассеяние”). В результате интерференции фазовый шум сигнала накачки преобразуется в шум интенсивности зондирующего излучения, дошедшего до определенной точки. Шумовые составляющие распространяются в той же полосе, что и полезный сигнал зондирования, и поэтому их нельзя устранить простой фильтрацией. В отличие от нелинейных эффектов, для которых характерным масштабом является эффективная длина волокна, величина помех, вызванных двойным рэлеевским рассеянием, пропорциональна всей длине волокна (включая в том числе и подводящее волокно), в связи с этим эффект становится определяющим в длинных измерительных линиях [19].
2. В стандартных схемах BOTDA сигналы накачки и зондирования взаимодействуют через вынужденное РМБ в каждой точке волокна, активируя локальную акустическую волну на несколько десятков наносекунд. Это время активации обычно намного короче, чем время когерентности лазера (связанное с шириной линии в несколько мегагерц). Для отдельно взятого импульса сканирования этим шумом можно было бы и пренебречь. Однако в реальной системе происходят накопление и усреднение большого числа рефлектограмм, а различные импульсы уже могут отличаться друг от друга в результате неопределенности спектрального позиционирования лазера. В итоге опять-таки происходит преобразование фазового шума источника в шум интенсивности [19].
3. В редких случаях появляется особый вид искажения BGS – помеха при оцифровке. Во-первых, сама по себе оцифровка (дискретизация) неизбежно приводит к потере данных. Кроме того, на лабораторных стендах или первых экземплярах серийных систем может теряться еще больше полезной информации: при высоких скоростях сканирования по частоте и одновременной оцифровке может происходить потеря синхронизации передающей и приемной частей, и некоторые рефлектограммы, соответствующие определенной частоте, могут быть потеряны. На графике BGS такой дефект отображается как локальное обращение дискретной функции в нулевое значение. Иногда бывает, что подобные потери данных случаются на стадии сохранения всего массива рефлектограмм, а также его хранения на жестких дисках. Еще один вид цифровых искажений может происходить во время экспериментов с неправильно подобранными параметрами излучения и приема данных. Здесь возможен как выход за пределы динамических диапазонов фотодетекторов и аналого-цифровых преобразователей, ведущий к “срезу” верха лоренцевой функции (так называемый клиппинг), так и, наоборот, слишком слабый сигнал для выбранных параметров квантования. Когда происходит сложение сразу нескольких цифровых помех и при этом воздействуют еще типовые для рефлектометров и анализаторов РМБ традиционные оптические шумовые компоненты, распознать максимум BGS и определить BFS становится достаточно сложно.
Все описанные шумы имеют разную природу, спектральный состав и другие особенности и существенно усложняют извлечение BFS. А извлечь частоту бриллюэновского сдвига можно различными способами. Во-первых, логичным было бы предположение, что, поскольку работа со спектрами достаточно сложна и нетривиальна, оптимальным решением было бы получение информации о бриллюэновском сдвиге без детектирования полных спектров. Такие способы действительно представлены в современной научной литературе (так называемый Slope-assisted BOTDA). Использование чирпированных импульсов вместо классического медленного частотного сканирования позволяет сразу получать пространственную развертку величины, связанной с частотной координатой пика [20, 21].
Для такого метода не нужно серьезной цифровой обработки сигнала, а единичный проход импульса легко визуализируется или усредняется на обычном лабораторном осциллографе. Эти мощные современные методы, без сомнения, подходят для регистрации быстро меняющихся физических величин (температур или деформаций), однако в плане итоговой точности многие из них пока проигрывают классическим методам частотного сканирования, предусматривающим получение спектров и локализацию событий на них.
Таким образом, уйти от получения спектра и его изучения в итоге не удается, а определению BFS просто по максимальному значению мощности в спектре препятствуют шумы фотодетектора и помехи, связанные с различными оптическими явлениями, которые в значительной степени искажают форму сигнала и приводят к погрешности. Как следствие, данный метод практически не применяется в настоящее время ввиду своей неэффективности. Это наглядно демонстрирует график сравнения метода нахождения координаты пика по максимальному значению и современного способа детектирования – метода обратной корреляции (рис. 5).
Рис. 5.
Сравнение метода нахождения координаты пика по максимальному значению и современного способа детектирования – метода обратной корреляции [22].
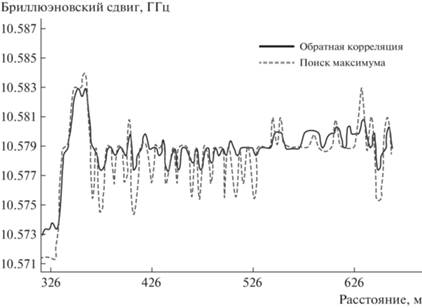
На рис. 5 представлена рефлектограмма сравнительно равномерного по длине фрагмента оптического волокна, на которой частотный сдвиг вычислен двумя разными способами. Штриховая линия характеризует паразитные флуктуации, вносимые неверным способом вычисления координаты пика по максимальному элементу. По всем представленным причинам авторы не будут возвращаться в настоящем обзоре к двум способам, описанным ранее (вычислению пика по максимальному значению и получению искомой величины без регистрации спектра).
Стоит отметить, что хороший способ получения бесшумных спектров – это предотвращение зашумленности на аппаратном уровне. Для этого используются аппаратные меры: подбор оптимальных элементов схемы, установление корректных мощностей накачки и зондирования, параметров длительности импульса в соответствии с используемым типом волокна и его длиной. Также достаточно хорошо подходят методы, применяемые в классической рефлектометрии: зондирование линии псевдослучайными последовательностями, переход в частотную область и т.д. Так же как и в рефлектометрии Рэлея, улучшить эксплуатационные параметры можно за счет внесения отражателей в линию: в данном случае – динамических. Аппаратные меры рассмотрены в части 2 настоящего обзора.
Когда все аппаратные меры исчерпаны и максимально очищенный от шумов спектр получен в дискретном виде, может быть применена обработка сигнала. Диапазон применяемых исследователями методов в настоящее время поистине широк: от фильтров низких частот, основанных на прямых и обратных фурье- и вейвлет-преобразованиях, до алгоритмов, до настоящего времени применявшихся только для профессиональной обработки изображений.
В ряде случаев эффективной альтернативой аппаратным и программным методам увеличения отношения сигнал/шум может стать корреляционная обработка сигналов. После такой обработки на выходе исследователь получает новую функцию (корреляционный профиль, зачастую тоже лоренцеву кривую), имеющую более высокое отношение сигнал/шум, чем у исходной функции. Максимум этого профиля однозначно соответствует конкретному значению BFS. Моделирование и эксперименты показали, что корреляционные методики наиболее эффективны, когда отношение сигнал/шум исходного спектра крайне низко (менее 10 дБ). Различные корреляционные методы определения BFS будут описаны в части 3 настоящего обзора.
Тем не менее, какой бы успешной ни была обработка, на выходе упомянутых алгоритмов исследователи получают все ту же функцию Лоренца, хоть и с меньшим количеством шумов. Сами по себе алгоритмы не решают задачу нахождения максимума. После их применения данную задачу еще предстоит решить. Методы решения этой задачи рассмотрены в части 4 данного обзора.
На данный момент своего рода золотым стандартом являются методы аппроксимации лоренцевой функцией полученного спектра. Данные методы имеют на выходе аналитическую функцию, координата центра, ширина на полувысоте и амплитуда которой могут быть получены с гораздо более высокой точностью. В настоящее время алгоритмы, выполняющие такие функции, достаточно хорошо оптимизированы для быстрой работы и включены в стандартную программную комплектацию большинства коммерческих рефлектометров и анализаторов.
Практика, однако, показала, что использование аппроксимации спектра лоренцевой функцией не всегда эффективно для сигналов, имеющих экстремально низкое отношение сигнал/шум. В этом случае целесообразно применение корреляционных методов. Обычно они представляют собой алгоритмическую реализацию вычисления взаимно-корреляционной функции между спектром в дискретном виде, полученным из измерений, и некоторой эталонной функцией, сохраненной в памяти устройства заранее. Важной особенностью применения подобных методов является оптимальный выбор данной эталонной функции, как и в случае с вейвлет-фильтрацией, где для получения оптимального результата необходимо подобрать соответствующий материнский вейвлет. Стоит отметить, что корреляционные методы неодинаково эффективны при всех отношениях сигнал/шум, поэтому их применение ограничено рядом специальных задач и может быть эффективно в связке с аппроксимацией лоренцевой функцией.
В ряде задач, когда параметров настройки алгоритмов всех упомянутых методов слишком много и их достаточно трудно подобрать аналитически, могут быть использованы методы искусственного интеллекта и машинного обучения. Обычно такие способы основаны на итерационном выявлении связей особенностей исследуемого сигнала с заданным при обучении результатом и присвоении им весовых коэффициентов. Эти алгоритмы в большинстве случаев эффективны для сигналов разных типов и хорошо адаптируются к различным их разновидностям, однако требуют достаточно внушительных объемов данных для обучения. Одной из преград в формировании баз таких данных может быть полная или частичная невозможность получения эталонных значений бриллюэновского частотного сдвига (BFS) из эксперимента. Однако в ряде прикладных задач, где обучение системы происходит не на значениях BFS, а на связанных с этой величиной температурах или деформациях, эта преграда обходится [17].
Таким образом, как различные группы методов, так и сами методы внутри них обладают рядом преимуществ и недостатков, и их применение разумно в тех условиях, для которых они созданы. Обзору особенностей методов, представленных в упомянутых выше группах, посвящена настоящая работа.
2. АППАРАТНЫЕ МЕРЫ И ФИЛЬТРАЦИЯ СИГНАЛА
Бриллюэновские рефлектометры, в отличие от анализаторов, в которых подключение зондирующей линии осуществляется с обоих концов оптического волокна, более подвержены высокому зашумлению. Это связано с тем, что в волокно посылается только сигнал зондирующего излучения, который также играет и роль накачки. В связи с этим точность измерения сдвига бриллюэновской частоты падает с увеличением расстояния оптической линии более значительным образом.
Далее будут рассмотрены подходы увеличения отношения сигнал/шум системы, основанные на применении аппаратных улучшений рефлектометрической системы.
В работе [23] авторами предложена схема многоволновой бриллюэновской рефлектометрии (рис. 6). Несколько длин волн формируются при помощи модуляции излучения узкополосного лазера модулятором Маха–Цендера (ЭОМ на рис. 6). Длины волн, разнесенные на величину не менее ширины полосы пропускания фотоприемного устройства, генерируют множественные спектры бриллюэновского усиления, которые регистрируются при помощи когерентного детектирования. В результате обработки спектров нескольких длин волн авторами было достигнуто увеличение отношения сигнал/шум системы на 5.1 дБ при длине волоконной линии 50 км, что эквивалентно улучшению в 1.8 раза по сравнению с обычной системой.
Рис. 6.
Схема многоволнового бриллюэновского рефлектометра. Верхняя выделенная штриховой линией область – генератор нескольких длин волн. Нижняя выделенная штриховой линией область – деполяризатор. РОС-ЛД – лазерный диод с распределенной обратной связью, ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, ФСЭ – фильтр спонтанной эмиссии, ЭАС – электрический анализатор спектра, ПД – поляризационный делитель, КП – контроллер поляризации, ВСП – волокно, сохраняющее поляризацию, DC-сдвиг – смещение постоянного тока.

Позднее в работах [24–26] такой подход был повторно подтвержден. Более того, авторы, внедрив в опорное плечо системы деполяризующий элемент (нижняя выделенная штриховой линией часть рис. 6), состоящий из двух поляризационных делителей, смогли добиться еще более высоких значений увеличения отношения сигнал/шум системы. В обоих случаях авторы использовали подход с тремя длинами волн, но, проведя моделирование, показали, что потенциально возможно применение этого подхода с использованием вплоть до 11-ти длин волн для еще более значительного увеличения отношения сигнал/шум.
Деполяризующий элемент, представляющий собой интерферометр Маха–Цендера, может использоваться не только для уменьшения шумов [27], вызванных поляризацией излучения. В работах [28, 29] предложена схема модифицированного интерферометра Маха–Цендера с включенной в одно из плеч брэгговской решеткой (рис. 7).
Рис. 7.
Схема бриллюэновского рефлектометра с модифицированным интерферометром Маха–Цендера. РОС-ЛД – лазерный диод с распределенной обратной связью, ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, ВБР – волоконная брэгговская решетка, ФД – фотодетектор.
Брэгговская решетка в данной ситуации служит для фильтрации шумов, связанных с отражением Френеля и рассеянием Рэлея. Эксперименты показали, что чувствительность такой системы может быть повышена в более чем 20 раз.
Разделение поляризационных компонент при помощи деполяризующего элемента получило развитие в работах [30, 31]. В работе [30] рассмотрен метод уменьшения поляризационного затухания. Зачастую для борьбы с этим эффектом используется поляризационный скремблер. Но такой подход требует настройки и при этом довольно затратен. Cao и соавторы [30] предложили схему пассивного элемента, состоящего из двух поляризационных делителей, соединенных друг с другом (рис. 8); в одно из плеч при этом встроена линия задержки, равная длине импульса. Таким образом зондирующий сигнал разделяется на две поляризационные компоненты.
Рис. 8.
Схема бриллюэновского рефлектометра с разделением ортогональных поляризационных мод. ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, КП – контроллер поляризации, ПД – поляризационный делитель, БФД – сбалансированный фотодетектор, У – усилитель, АЦП – аналого-цифровой преобразователь, ПК – персональный компьютер, РЧД – радиочастотный драйвер.

В результате авторы не только добились упрощения схемы рефлектометрической системы, но и обеспечили улучшение стабильности сигнала при измерении протяженных участков волоконных линий.
Похожий подход был представлен в работе [31], где авторы использовали модуль дифференциальной групповой задержки для разделения сигнала накачки на две ортогональные поляризационные компоненты. Преимуществом такого подхода является уменьшение времени измерения, поскольку пропадает необходимость использования поляризационного скрамблера для компенсации поляризационных эффектов. Авторам удалось добиться частоты измерений 650 Гц для волоконной линии длиной 930 м. Представленный подход отличается несложной реализацией и невысокой стоимостью. Скорость работы и пространственное разрешение при этом были сопоставимы с аналогичными параметрами других динамических датчиков, однако точность системы была меньше.
Авторами работы [32] предложена схема бриллюэновского рефлектометра с использованием двойной накачки (рис. 9). Двойная накачка обеспечивается прямой модуляцией ЭОМ с минимальной передаточной функцией при помощи внешнего генератора сигналов произвольной формы. На выходе модулятора таким образом генерируются две боковые полосы частот, разнесенные примерно на удвоенную бриллюэновскую частоту. Эти две волны накачки генерируют два бриллюэновских сигнала, которые симметрично расположены по отношению к несущей длине волны лазера. Для достижения максимальной мощности двойной накачки используется модуль дифференциальной групповой задержки, плоскость поляризации которого повернута на 45°. Получаемые таким образом два BGS складываются для получения общего спектра. Применение такой технологии позволило увеличить отношение сигнал/шум в два раза.
Рис. 9.
Схема бриллюэновского рефлектометра с разделением ортогональных поляризационных мод с применением модуля дифференциальной групповой задержки. РОС-ЛД – лазерный диод с распределенной обратной связью, ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, ВБР – волоконная брэгговская решетка, ЭУ – эрбиевый усилитель, ДГЗ – дифференциальная групповая задержка, БОС – блок обработки сигналов, ПС – поляризационный скремблер.

Помимо этого, отношение сигнал/шум системы может быть повышено путем увеличения коэффициента экстинкции зондирующего импульса. В работе [33] продемонстрировано использование двухкаскадного электрооптического модулятора (рис. 10), который позволил увеличить коэффициент экстинкции импульса с 25 до 50 дБ.
Рис. 10.
Схема бриллюэновского рефлектометра с применением двухкаскадного электрооптического модулятора. ЭОМ – электрооптический модулятор, ПС – поляризационный скремблер, ЭУ – эрбиевый усилитель.
Последующее увеличение отношения сигнал/шум составило порядка 8 дБ, а ошибка определения частоты бриллюэновского сдвига уменьшилась с 6.16 до 2.09 МГц. Эта работа была развита другими авторами [34, 35], они использовали синхронный оптический переключатель, позволивший увеличить коэффициент экстинкции с 35 до 60 дБ, а также переключатель усиления в паре с мультиплексором с уплотнением каналов.
Развитие получили также работы, направленные на изучение влияния формы зондирующего импульса на отношение сигнал/шум системы. В работе [36] авторы провели сравнение точностей систем бриллюэновского мониторинга, использующих различные формы модуляции зондирующего импульса. Различные формы сигнала достигались с помощью программируемого модуля управления сигналами, встроенного в акустооптический модулятор (рис. 11).
Рис. 11.
Схема бриллюэновского рефлектометра с возможностью изменения формы зондирующего импульса. ЭОМ – электрооптический модулятор, ЭУ – эрбиевый усилитель, АЦП – аналого-цифровой преобразователь, ВБЛ – волоконный бриллюэновский лазер.

Экспериментально показано, что применение импульсов трапециевидной и треугольной формы позволяет достигнуть увеличения отношения сигнал/шум в 2–3 раза по сравнению со стандартным подходом, когда используется импульс прямоугольной формы.
В связи с тем что отраженное обратно бриллюэновское излучение достаточно слабо, чувствительность фотоприемных устройств, используемых в системах мониторинга, является доминирующим фактором, влияющим на отношение сигнал/шум системы. В работе [37] авторы показали возможность использования однофотонных детекторов (single-photon detector). В дальнейшем другими авторами [38] были задействованы однофотонный детектор с повышающим преобразованием и волоконный сканирующий интерферометр Фабри–Перо. Получившаяся таким образом сканирующая система бриллюэновской рефлектометрии смогла достичь точности определения температуры 1.2°С на длине более 9 км для волокна, сохраняющего состояние поляризации.
Однако стоит отметить, что способы увеличения точности нахождения BFS не ограничиваются аппаратными мерами. Достаточно важную роль играют методы очищения сигнала при помощи цифровой фильтрации. Самый простой low-pass-фильтр для BGS можно организовать простым накоплением данных. Данные могут накапливаться с усреднением по частоте и/или пространству. В первом случае произойдет падение быстродействия системы, во втором – пространственного разрешения, поэтому оба этих способа применяют строго дозировано, в зависимости от конкретной задачи. Поэтому кроме простого усреднения используют достаточно много разных способов увеличения отношения сигнал/шум. Так, например, применяют методики кодирования зондирующего сигнала (их в полной мере можно отнести к корреляционным, поэтому они будут рассмотрены в соответствующем разделе данного обзора), вейвлет-фильтрацию [39–43] и фильтрацию Фурье [44]. Все эти методы зарекомендовали себя несколько лет назад как достаточно эффективные для решения отдельных задач, однако современный запрос науки и техники диктует новые требования к точности определения BFS. Логичным эволюционным этапом развития описанных методов можно считать успешное применение алгоритмов, использующихся для обработки изображений (IP – image processing), для анализа массивов BGS. До появления такого подхода исследователи были ограничены одномерным пространством при решении подобной задачи, в то время как исходные данные для исследования (набор BGS) представляют собой поверхность, где в качестве еще одной координаты используется длина сенсора или исследуемого волокна. Такую поверхность достаточно удобно представить в виде двумерного массива числовых значений, легко преобразуемых в цветное изображение. Для наглядности такую визуализацию используют большинство коммерческих исследовательских и сенсорных систем, однако обрабатывать подобные данные именно как изображения стали сравнительно недавно. Если говорить об упомянутых уже способах простейшего усреднения сигнала по частоте и пространству, но уже в терминах обработки изображений, то такой подход будет эквивалентен хорошо известному фильтру blur (размытие), имеющемуся практически в каждом редакторе растровых изображений. Разумеется, этот подход самый простой и далеко не самый эффективный. Ниже будут рассмотрены гораздо более сложные и дающие более высокую точность методы обработки массивов BGS как изображений.
Так, в работе [45] представлен адаптивный алгоритм обработки изображений, основанный на методе ограниченных наименьших квадратов (Constrained least squares – CLS). Предложенный алгоритм обеспечил самое значимое увеличение отношения сигнал/шум в сравнении с такими методами, как нелинейный алгоритм нелокальных средних (Non-local means – NLM) и вейвлет-шумоподавление (Wavelet denoising – WD) (12.2 дБ), а также сравнительно высокое пространственное разрешение системы (1.41 м). Кроме того, метод оказался более быстродействующим для заданных экспериментальных данных. Быстродействие метода обеспечивается тем фактом, что алгоритм метода ограниченных наименьших квадратов не требует подбора оптимальных параметров, в отличие от своих аналогов.
Еще одно сравнение метода IP с другими методами представили Wu и др. в работе [46], где они привели результаты обработки изображений тремя алгоритмами для подавления шума в спектрах РМБ: NLM, WD, а также “сравнение блоков и 3D-фильтрация” (Block-Matching and 3D-filtering – BM3D). Авторы показали, что все три методики позволяют получить достаточно высокий уровень снижения шума (вплоть до 13 дБ). Кроме того, была также проведена оценка быстродействия каждого алгоритма. Для алгоритмов NLM, WD и BM3D скорость обработки одного и того же набора данных составила соответственно 3.7 мин, 4.8 с и 9.1 мин. Тем не менее, представленный авторами алгоритм BM3D продемонстрировал лучшие показатели пространственного разрешения при одинаковых значениях параметров фиксации данных рефлектометрической системой.
Алгоритм, описанный в работе [47], основан на разделении исходной спектральной матрицы оптического волокна на сегменты, у которых бриллюэновский сдвиг отличается от среднего значения BFS для всего оптического волокна. После выделения сегментов осуществляется сдвиг спектров рассеяния таким образом, чтобы совместить BFS фрагментов. После сдвига сегментов проводятся фильтрация сигнала и обратный сдвиг/реставрация исходной матрицы. Таким образом авторам удалось достичь увеличения точности измерений на 13% и пространственного разрешения на 46% по сравнению с IP с применением NLM-фильтрации.
Научная группа Soto, Ramírez и Thévenaz [48] представила сравнение линейных и нелинейных алгоритмов обработки изображений применительно к анализу BGS. Авторы представили процедуру оптимизации алгоритма NLM, заключающуюся в поиске необходимых параметров. Используя оптимизированный подход, авторы смогли добиться работоспособности стандартной BOTDR-системы на расстоянии более 100 км с пространственным разрешением 2 м и шагом частотного сканирования 1 МГц (при погрешности измерений 0.77 МГц с 2000 усредненных рефлектограмм временной области).
Описанные выше алгоритмы обработки данных не являются единственным способом увеличения отношения сигнал/шум массивов BGS. Параллельно с развитием 2D-методов получили распространение корреляционные техники обработки сигнала, в большинстве своем пока реализованные только в одномерном пространстве. Однако, возможно, в скором будущем подобные подходы могут быть объединены для улучшения эффективности и повышения точности алгоритмов. Наиболее перспективные корреляционные методы повышения отношения сигнал/шум будут описаны в следующем разделе.
3. КОРРЕЛЯЦИОННЫЕ МЕТОДЫ ОБРАБОТКИ BGS
Программные и аппаратные корреляционные методы обработки сигналов с рефлектометров разных типов хорошо зарекомендовали себя как во временной, так и в частотной области [49, 50]. Вычисление автокорреляционной или взаимно-корреляционной функции является проверенным способом повышения отношения сигнал/шум данных, в том числе и при математической обработке BGS. В большинстве таких методов исходная функция заменяется на корреляционную, и дальнейшая работа происходит уже именно с ней.
В работах Farahani M.A. и др. [51] и [52] показано, что точность результатов лоренцевой аппроксимации (Lorentzian curve fitting – LCF) (метод будет рассмотрен в следующей главе настоящего обзора) напрямую связана с отношением сигнал/шум и определением параметров подбора алгоритмов аппроксимации кривой [53, 54], и это дает серьезную ошибку нахождения BFS. В качестве альтернативы Farahani M.A. и др. представили метод, основанный на технике взаимной корреляции полученного спектра и идеальной функции Лоренца. Его преимущества определили следующие два факта: 1) взаимная корреляция между двумя кривыми Лоренца дает кривую с лоренцевым распределением; 2) взаимная корреляция между идеальной и зашумленной кривыми Лоренца дает кривую, форма которой в основном определяется формой полезного сигнала и в гораздо меньшей степени – шумом. В дальнейшем будем называть этот метод кросс-корреляционным (Cross-correlation method – CCM). Так, взаимно-корреляционная функция между эталонной кривой gr($v$) и кривой Лоренца с шумом gn($v$), состоящей из неизвестной кривой gu($v$) и случайного шума n($v$), выглядит следующим образом:
(8)
$\begin{gathered} {{G}_{{rn}}}(v) = {{g}_{r}}(v){{g}_{n}}(v) = {{g}_{r}}(v)[{{g}_{u}}(v) + n(v)] = \\ \, = ~{{g}_{r}}(v){{g}_{u}}(v) + {{g}_{r}}(v)n(v) = {{G}_{c}}(v) + {{N}_{c}}(v). \\ \end{gathered} $В представленном выше выражении компонента Gc($v$) есть сигнал, являющийся результатом взаимной корреляции между двумя идеальными кривыми Лоренца, а член Nc($v$) представляет собой порцию сигнала, являющуюся результатом взаимной корреляции между идеальной кривой Лоренца и белым шумом. Соотношение между этими двумя компонентами полученного выражения пропорционально отношению сигнал/шум функции Grn($v$). Сравнение отношения сигнал/шум результирующей функции и исходного BGS показало, что исходный спектр является более шумным. Можно также утверждать, что взаимно-корреляционная функция имеет почти идеальное лоренцево распределение вокруг области пика, где шум значительно снижен. На рис. 12 показаны эталонная кривая Лоренца и полученный в эксперименте BGS, а также их взаимно-корреляционная функция. Амплитуда взаимно-корреляционной функции нормирована для наглядности.

Позже, уже в 2020 году, в работе [22] был показан также корреляционный метод, однако не использующий идеальную функцию Лоренца и функционирующий следующим образом.
Пусть имеется BGS, полученный в результате измерения, который представляет собой набор 2N + 1 пар [fi, Pi], i ∈ [0, 2N]. Здесь Pi – детектированная плотность мощности РМБ на частоте fi = = f0 + iΔf, где f0 – минимальная частота спектра, Δf – шаг сканирования по частоте (рис. 13а). Строится “обратный” сигнал P ' как отражение BGS относительно вертикальной оси, проходящей через среднюю частоту f0 + NΔf : $P_{i}^{'}$ = P2N – i. Далее находится такой сдвиг по частоте “обратного” сигнала, при котором свертка прямого P и “сдвинутого обратного” P'' сигналов максимальна. “Сдвинутый обратный” сигнал задается соотношением $P_{i}^{{''}} = ~P_{{i - k}}^{'}$, если же [i–k] находится вне диапазона [0, 2N], то $P_{i}^{{''}}$ = 0 (рис. 13а).

Поскольку измеренный сигнал складывается из двух слагаемых (P = Ps + Pn, где Ps – собственно полезный сигнал, а Pn – шум, в том числе обусловленный дискретизацией), имеем

Свертки сигнала и шума, представляющие собой второе и третье слагаемые, равны нулю с точностью до статистической погрешности, свертка двух шумов также должна быть близка к нулю, поскольку значения шума в разных точках не коррелируют. Таким образом, основной вклад в свертку должно вносить первое слагаемое, и ее максимум должен приходиться на такой сдвиг обратного сигнала, при котором максимумы спектров Ps и P'' s совпадают. Построив график зависимости свертки (P * P'') от величины сдвига k (рис. 13б) и определив, при каком сдвиге k0 свертка достигает своего максимума, можно получить частоту, соответствующую максимуму BGS Ps: fb = = f0 + (N – k0/2)Δf, с точностью до ошибки дискретизации.
Описанный метод доказал свою конкурентоспособность в сравнении с LCF, однако в рассмотренной выше работе со своим прообразом – методом CCM – сравнен не был. Поэтому годом позже та же команда авторов [55] провела сравнительную оценку эффективности современных методов детектирования частотного сдвига в оцифрованных спектрах вынужденного РМБ в оптических волокнах. Один из методов – разработанный ранее метод обратной корреляции (Backward correlation – BWC) – испытывался в сравнении с LCF и CCM и продемонстрировал свою эффективность для обработки спектров с экстремально низким отношением сигнал/шум (SNR < 5 дБ), содержащих при этом также помехи оцифровки (локальные потери данных). При переходе из областей с данными, где SNR > 10 дБ, в области с SNR < 5 дБ точность метода BWC падала всего в 4–5 раз, тогда как у аналогов – на 2–4 порядка. Также было показано, что при вероятности более 9% появления в спектре цифрового артефакта (локальной потери данных, представляющей “зануление” случайной группы точек) метод BWC показывает лучшие результаты, чем остальные (рис. 14).

Подключение к методу нейросетевого алгоритма после обучения на более чем 2 ⋅ 105 спектрах позволило уменьшить ошибку детектирования частотного сдвига еще на 10% [56]. Подробнее о нейросетевых алгоритмах будет рассказано в завершающей части настоящего обзора.
Принцип метода, основанного на “анализе зависимостей перекрестных эталонов” (Cross Reference Plot Analysis – CRPA) применительно к экстракции BFS из BGS, представлен в работе [57]. В этом алгоритме также используется взаимная корреляция.
Пусть имеются “опорный” gref(f) = (gref(f1), gref(f2), …, gref(fN)) и измеренный g(f) = (g(f1), g(f2), …, g(fN)) спектры. Возьмем фрагмент опорного спектра (gref(fp), gref(fp + 1), …, gref(fp + m – 1)) и фрагмент измеренного спектра (g(fq), gref(fq + 1), …, gref(fq + m – 1)), где m – заданное число, m < N, а p и q могут принимать любые значения от 1 до N – m + 1. Посчитаем свертку выбранных фрагментов: $\sum\nolimits_{i = 0}^{m - 1} {{{g}_{{ref}}}({{f}_{p}} + i){\text{*}}g} $(fq + i). Если полученное значение превышает некий порог ε, отметим точку (fq + m/2, fp + m/2) на плоскости (рис. 15). Значения fq + m/2 и fp + m/2 соответствуют серединам выбранных фрагментов спектров. Поскольку следует ожидать высокой корреляции между фрагментами, только если они оба находятся вблизи максимумов соответствующих спектров (опорного и измеренного), центр масс построенной таким образом фигуры дает координаты максимумов опорного и измеренного спектров.
Рис. 15.
Принцип работы метода CRPA. Слева – опорный (кривая черного цвета) и измеренный (кривая серого цвета) спектры, справа – построенная фигура, центр масс которой соответствует максимумам спектров [57].

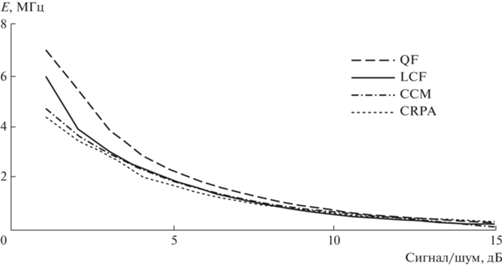
Моделирование и эксперимент, проведенные в работе [57], показали, что CRPA превосходит по точности другие методы. Об этом будет изложено подробнее в главе, посвященной методу LCF, а также в Заключении.
Существуют также корреляционные методы, прямой задачей которых не является повышение отношения сигнал/шум сигнала при проведении стандартного измерения. Основным назначением таких методов может быть увеличение скорости измерения. Например, исследователей всегда волновал вопрос, как увеличить скорость сканирования BGS по частоте, либо понизить его дискретизацию таким образом, чтобы искомый профиль BGS можно было восстановить по гораздо меньшему числу точек и корректно найти BFS. Группа Li и др. [58] выяснила, что таких точек может быть всего пять. Эта команда исследователей вводит термин IDBGS (Incomplete discreet BGS – неполный дискретный BGS). Корреляционный анализ позволил восстановить сравнительно точные значения BFS, хоть и в некоторой степени близкие к индикаторным. Это было осуществлено с частотой обновления рефлектограмм 600 Гц, что может в некоторой степени быть сопоставлено с характеристиками распределенных акустических датчиков [59, 60]. Результаты численного моделирования показали, что вероятность погрешности по частоте около 0.50 МГц может достигать 49/50 при шаге частотного сканирования 5 МГц и числе склеек неполного спектра, равном 80. Кроме того, авторы отмечают, что время склейки IDBGS также может оказывать влияние на итоговую точность системы. Наряду с уже упомянутой работой [55], рассматриваемое исследование доказывает применимость автокорреляционной функции для восстановления точного значения BFS в BGS, содержащих неполные данные. В дальнейшем подобные методы экстракции BFS из BGS при помощи взаимно-корреляционной функции модифицировались программно для ускорения процесса вычислений [61].
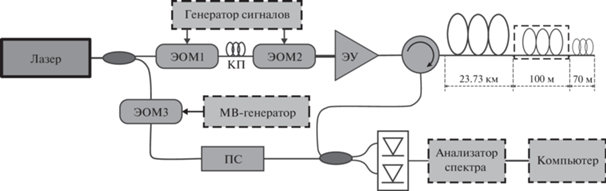
Некоторые корреляционные методы исследования BGS не ограничиваются только обработкой обратно рассеянного сигнала. В некоторых случаях требуется получение сложного зондирующего сигнала, часто это реализуется путем амплитудной модуляции, которая обеспечивает зондирование сенсорного волокна или исследуемой линии псевдослучайными последовательностями. Далее, как и в более простом случае, т.е. корреляционной рефлектометрии Рэлея [62–64], пришедший из волокна на фотодетектор сигнал подвергается специальной обработке, предусматривающей построение автокорреляционной функции этого сигнала и сигнала исходного, который уходил в линию. Такой подход дает увеличение отношения сигнал/шум для каждой рефлектограммы, а следовательно, и для каждой частоты BGS. Если цифроаналоговый преобразователь рефлектометра и модулятор имеют достаточную гибкость в вариативности параметров, применение корреляционной рефлектометрии Бриллюэна не требует существенных модификаций аппаратной части системы. Однако специфические особенности применения такого подхода, разумеется, все же существуют. Они будут рассмотрены ниже. К тому же необходимо отметить, что данный метод, называемый также в зависимости от типа системы C-BOTDA или C-BOTDR (Correlation BOTDA или Correlation BOTDR), нельзя путать с рефлектометрией Бриллюэна в корреляционной области (BOCDA или BOCDR), где используются существенные аппаратные модификации (такие как, например, замена импульсных источников на непрерывные с перестраиваемой длиной волны), что ставит перед собой разные цели: увеличение пространственного разрешения, разделение влияния температур и деформаций и т.д. [65, 66]. Основные преимущества метода прекрасно описали Soto, Le Floch и Thévenaz во введении к своей работе [67]. Итак, специальная модуляция (кодирование) оптических импульсов увеличивает отношение сигнал/шум полученных BOTDA-спектров за счет запуска нескольких последовательностей импульсов в волокно с последующей обработкой данных для получения ответа на один импульс [68–71]. Таким образом, при сохранении пиковой мощности сигнала на уровне случая одиночного импульса общая энергия излучения накачки, подаваемой в сенсор или исследуемое волокно, распределяется во времени и, следовательно, увеличивается на коэффициент, равный количеству импульсов в каждой последовательности. При этом отношение сигнал/шум увеличивается с сохранением пространственного разрешения. Наиболее известные на сегодняшний день эффективные последовательности (коды), применимые для серьезного повышения отношения сигнал/шум (что требуется на больших длинах волокна), используют однополярные (включение/выключение) последовательности импульсов, в которых биты “1” и “0” задаются с использованием стандартной модуляции интенсивности излучения [72]. Другие техники кодирования, отдельные из которых также задействованы в современных радиолокационных системах, используют последовательности биполярных импульсов, в которых необходимо задание элементов “–1” и “1”. Некоторые из этих кодов, например коды Голея с биполярной комплементарной корреляцией (Bipolar Complementary–Correlation Golay Code) [73], обеспечивают более значительное увеличение отношения сигнал/шум, чем любая известная схема кодирования, используемая в бриллюэновской рефлектометрии. Именно поэтому группа Soto и др. [67] поставила перед собой задачу реализовать новый подход к модуляции сигнала BOTDA, чтобы преодолеть физическое ограничение, налагаемое модуляцией интенсивности при формировании последовательностей однополярных импульсов, а при использовании биполярных последовательностей реализовать эквивалентный эффект от так называемых “положительных” и “отрицательных” импульсов. Метод, однако, потребовал некоторых изменений в аппаратной части: необходимо было ввести специальный модулятор Маха–Зендера для создания двух волн накачки – для “положительных” и “отрицательных” импульсов, эквидистантно отступающих по шкале частот от излучения зондирования (рис. 16).

Применение биполярных кодов позволило снизить погрешность значений BFS до 0.8 МГц при использовании сенсора длиной 100 км.
В статье [74] представлен метод, как и в вышеупомянутой работе, использующий спектры усиления и потерь, с кодированным фазовым сдвигом Голея для улучшения дальности работы системы и в то же время осуществления измерения с высоким пространственным разрешением. Сигнал накачки, представляющий собой последовательность Голея, поочередно модулируется по частоте с целью генерации стоксовой и антистоксовой компонент РМБ. Численное моделирование показало, что одновременное использование бриллюэновских коэффициентов усиления и затухания в совокупности с применением метода импульсного кодирования увеличило динамический диапазон чувствительности и улучшило отношение сигнал/шум датчика. Выполнив моделирование более 500 м волокна, авторы также успешно продемонстрировали 10-сантиметровое пространственное разрешение (длительность импульса 1 нс).
Вне зависимости от того, где был применен корреляционный метод (во временной области, как в случае кодов Голея, в области частот, как в случае с BWC, или же вовсе на обеих стадиях обработки сигнала), выходными данными этих процессов по-прежнему являются дискретные BGS. Как показывают уравнения, приведенные в этом разделе, после применения корреляционных методов шумовая компонента существенно снижается, однако, она все же остается в сигнале, при этом полезная составляющая по-прежнему описывается функцией Лоренца. В условиях с экстремально низким отношением сигнал/шум паразитная компонента может быть видна на спектре даже невооруженным глазом. Следовательно, находить координату максимума лоренцевой функции просто по максимальному значению в дискретно заданном спектре по-прежнему не всегда нецелесообразно. В таких случаях необходимо применение методов аппроксимации лоренцевой функцией, которые будут описаны в следующем разделе настоящего обзора.
4. МЕТОДЫ АППРОКСИМАЦИИ ЛОРЕНЦЕВОЙ ФУНКЦИЕЙ
Методы данного класса можно смело назвать самыми применяемыми в бриллюэновской рефлектометрии. Этот статус они по праву заслужили ввиду своей универсальности при использовании в стандартных метрологических и сенсорных системах, использующих в качестве чувствительного элемента типовое одномодовое телекоммуникационное волокно и режимы зондирования сравнительно длительными импульсами (более 1 м). Все это обеспечивает хорошо прогнозируемую спектральную картину: приемлемые отношения сигнал/шум (выше 20 дБ) и хорошо различимую компоненту РМБ строго лоренцевой функции. Благодаря этим качествам методы LCF быстро стали неотъемлемой программной частью основных коммерческих систем. К сожалению, коммерческая составляющая успеха данного метода явилась причиной сравнительно невысокого количества публикаций по данной тематике (для сравнения, в несколько раз большее количество работ было найдено авторами обзора по обработке спектров с целью понижения уровня шумов и нахождения BFS при помощи искусственного интеллекта). Однако практический опыт применения BOTDA-систем позволяет заявлять о постепенной эволюции методов в течение последних 15 лет с точки зрения как улучшения производительности, так и повышения точности.
Обратимся к сути этого подхода. Применительно к обработке BGS он был прекрасно изложен в работе Chengbin Li и Yongqian Li, доложенной на конференции “Wireless Communications, Networking and Mobile Computing” еще в 2009 году [75]. Итак, чтобы получить данные о BFS из измеренного BGS и максимально устранить шум, необходимо построить кривую Лоренца для аппроксимации экспериментальных данных. Для подбора кривой не обязательно, чтобы кривая проходила через все точки заданного дискретно массива, а ошибку извлечения BGS можно сделать минимальной, применяя метод наименьших квадратов. Для обеспечения наименьшей ошибки детектирования BFS в современных BOTDR- и BOTDA-системах используется алгоритм Левенберга–Марквардта (Levenberg–Marquardt – LM), который является одним из нелинейных методов наименьших квадратов с хорошей сходимостью, пригодной для аппроксимации BGS. Кратко изложим его суть. Функция Лоренца, заданная формулой
полностью описывается тремя параметрами (входящими в вектор х): физический смысл которых несложно найти в уравнении (6).N пар данных [tm, ym], полученных в результате измерения BGS и представляющих собой значения частоты в спектре и ее интенсивности соответственно, аппроксимируются нелинейным методом наименьших квадратов. Тогда наименьшая ошибка несоответствия полученного в эксперименте BGS и аппроксимирующей лоренцевой функции имеет наименьшую сумму квадратов S(x), которая определяется следующим образом:
(12)
$\min S(x) = \frac{1}{2}\mathop \sum \limits_{m = 1}^N {{[{{r}_{m}}(x)]}^{2}} = \frac{1}{2}\mathop \sum \limits_{m = 1}^N {{[{{y}_{m}} - f{\text{(}}{{t}_{m}}{\text{|}}x)]}^{2}}$.Предполагая, что
выражение (12) можно представить как: где ri(x) – нелинейная функция x.Метод LM используется для оптимального итерационного подбора аппроксимирующей функции, в нем S(x) стремится к минимуму за счет оптимизации параметров вектора x. Этот метод в принципе можно рассматривать как удачную комбинацию алгоритма наискорейшего спуска и алгоритма Гаусса–Ньютона (Gauss–Newton – GN). Метод LM имеет локальную сходимость GN и основные преимущества алгоритма наискорейшего спуска [76]. Для первой итерации параметры вектора x должны быть подобраны максимально близко к необходимым физическим значениям. В следующих итерациях они будут подвержены оптимизации. Итерационный принцип метода LM задается выражением
где dk – это направление поиска, определяемое как:(16)
${{d}_{k}} = {{[J{{({{x}_{k}})}^{T}}J({{x}_{k}}) + {{{{\mu }}}_{k}}I]}^{{ - 1}}}J{{({{x}_{k}})}^{T}}r({{x}_{k}}).$Рис. 17.
Абсолютная ошибка LCF/LM и других методов при разных значениях отношения сигнал/шум, согласно работе [22].
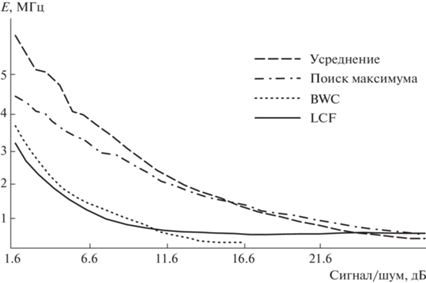
Рис. 18.
Абсолютная ошибка LCF/LM и других методов (QF – quadratic fitting) при разных значениях отношения сигнал/шум, согласно работе [57].
Как бы ни были удобны и точны аппроксимационные и корреляционные методы, во многих случаях они требуют подбора оптимальных параметров и их адаптации под различные условия измерения. Именно поэтому многие исследователи в последние годы поставили перед собой задачу создания гибких методик, снованных на машинном обучении и искусственном интеллекте, предусматривающих итерационное установление оптимальных связей между входными и выходными данными [77, 78]. По мнению многих ученых, в этих методах определения BFS кроется огромный потенциал, который уже в наши дни заметен по современным научным работам. Следующая глава посвящена обзору таких статей.
5. МЕТОДЫ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА В ДЕТЕКТИРОВАНИИ BFS
В данном разделе рассмотрены методы увеличения точности систем бриллюэновской рефлектометрии, в основе которых лежит применение нейронных сетей и машинного обучения.
В работах [79–82] описано использование нейронной сети прямого распространения для получения информации о температуре окружающей среды. Сети прямого распространения состоят из входного слоя, одного или нескольких скрытых слоев и одного выходного слоя. Каждый слой в свою очередь состоит из набора элементов, называемых нейронами, каждый из которых связан со всеми нейронами следующего и предыдущего слоев (рис. 19).
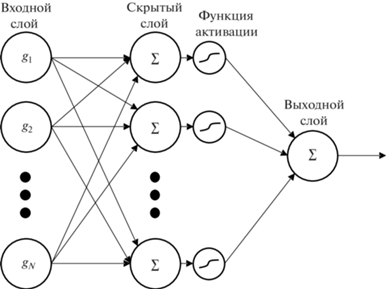
Сам нейрон представляет собой сумматор всех входящих в него взвешенных сигналов с нейронов предыдущего слоя, а последующий отклик нейрона формируется через функцию активации нейрона. Обучение таких сетей состоит в подборе весовых коэффициентов связей, которые соединяют между собой пары нейронов. Зачастую для обучения используют метод обратного распространения ошибки.
Для выполнения задачи определения температуры окружающей среды авторы спроектировали нейронную сеть, состоящую из двух скрытых слоев. Обучение сети происходило путем подачи на входной слой массива, содержащего BGS, а на выходной нейрон – соответствующего ему значения температуры окружающей среды. Подобрав соответствующие коэффициенты связи между нейронами, авторы смогли добиться определения температуры окружающей среды при помощи нейронной сети. Проведя сравнение с уже известными техниками анализа BGS, такими как аппроксимация лоренцевой функцией и взаимно-корреляционный метод, авторы работ показали, что использование нейронной сети обеспечивает более точный результат определения искомой величины.
В работе [83] представлено использование нейронной сети прямого распространения. Для обучения сети авторы использовали не классическую функцию Лоренца, которая, как считается, наиболее соответствует форме спектра бриллюэновского рассеяния, а псевдофункцию Фойгта, которая представляет собой комбинацию гауссовой и лоренцевой функций. На рис. 20 представлены для сравнения формы спектров трех исследованных функций.

Авторы работы [83] отмечают, что такой подход к обучению нейронной сети обеспечил более высокие показатели точности определения температуры окружающей среды из спектров бриллюэновского рассеяния.
В работах [84–86] авторы использовали нейронную сеть для одновременного измерения температуры и деформации оптического волокна при помощи бриллюэновского анализатора. Разработанная нейронная сеть принимала на вход не только BGS, но и другие параметры, полученные при помощи обработки спектров методом главных компонент. Этот метод позволяет уменьшить размерность данных, сохранив при этом максимум полезной информации. Суть метода заключается в поиске новой координатной оси, для которой дисперсия исходных данных будет максимальна, значения на этой оси будут считаться первой главной компонентой. В случае, если одной компоненты недостаточно для полного описания данных, выбирается второе направление координатной оси, перпендикулярное первому, – вторая главная компонента. Процесс повторяется, пока исходные данные не будут в достаточной степени описаны набором главных компонент. Деформация оптического волокна задавалась при помощи линейной подвижки, на которой было закреплено оптическое волокно, помещенное в термокамеру. По результатам эксперимента, проведенного авторами, ошибка определения температуры при заданной величине деформации составила менее 6°С.
Помимо классических типов нейронных сетей, в литературе также представлены и другие. Например, в работе [87] рассмотрено применение сверточной нейронной сети для увеличения отношения сигнал/шум полученных BGS. Такие сети часто используются при обработке изображений.
На рис. 21 изображен пример сверточной нейронной сети.

Суть работы сети состоит в прохождении ядром свертки (матрица весов) по исходному изображению, тем самым формируя множество карт значений, после чего происходит подвыборка для уменьшения размерности данных. Чередуя свертку и подвыборку, размерность уменьшают до такой степени, что полученные данные можно подать на стандартный многослойный персептрон.
Модель обучалась на смоделированных бриллюэновских спектрах и модельных шумах. Эксперименты показали, что в зависимости от частоты дискретизации получаемых данных возможно увеличение отношения сигнал/шум до 13.6 дБ. Скорость обработки изображения нейронной сетью составила 0.045 с.
Другое направление машинного обучения – метод опорных векторов (Support Vector Machine – SVM), идея которого состоит в том, чтобы разбить все пространство входных данных на подпространства (классы эквивалентности). Рассмотрим работу метода на примере определения температуры окружающей среды при помощи бриллюэновских рефлектометрических систем.
Для обучения системы снимается ряд спектров при температурах T1, T2, …, TN (по несколько спектров для каждой температуры). Каждый спектр можно представить в виде вектора из координат Pi – спектральных плотностей мощности на определенных частотах.
Построим эти векторы для температур T1 и T2, другими словами, нанесем точки в гиперпространстве. На рис. 22а точки, соответствующие температуре T1, выделены серым, а температуре T2 – черным. Найдем гиперплоскость, которая поделит гиперпространство таким образом, чтобы черные и серые точки лежали в разных полупространствах, а расстояния до ближайших к плоскости точек (они и называются опорными векторами) были одинаковыми (рис. 22а).

Повторим процедуру для всех возможных пар температур Ti и Tk (всего имеется N(N – 1)/2 пар температур), рис. 22б. В итоге все гиперпространство разбито на N частей, каждая из которых соответствует определенной температуре. Обучение завершено. Процесс определения температуры теперь сведен к тому, чтобы найти, в какую из частей гиперпространства попадает измеренный спектр.
Авторы работ [88, 89] исследовали применимость метода опорных векторов и сравнили его результаты с классическими методами поиска максимума бриллюэновского спектра. Эксперименты показали, что метод опережает классические подходы не только по точности, но и по быстродействию.
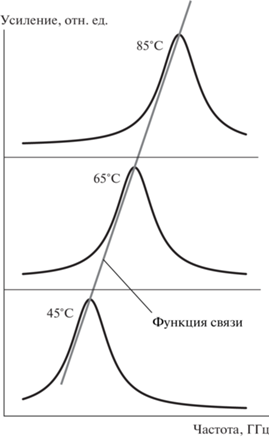
Следующий из рассмотренных подходов заключается в применении обобщенной линейной модели (Generalized Linear Model – GLM). Идея метода состоит в нахождении функции связи, преобразующей входной вектор из спектральных плотностей мощности в выходные данные (например, температуру или деформацию). На этапе обучения подбираются оптимальные параметры функции связи. На этапе измерения с помощью полученной функции вектор из спектральных плотностей мощности преобразуется в выходные данные. Нахождения самого BFS при этом, очевидно, не требуется.
Так, в работе [90] метод GLM применен для увеличения точности определения температуры окружающей среды при помощи бриллюэновского анализатора (рис. 23). Подбиралась линейная функция связи, при этом использовалась регуляризация Лассо во избежание переобучения модели. (Переобучение может случиться, если при обучении было использовано много “плохих” спектров. Подбор функции связи для наилучшего соответствия всем спектрам привел бы к неточному определению коэффициентов. Регуляризация позволяет отсечь “плохие” спектры и найти функцию связи более оптимальным образом.)
Авторы работы [90] провели сравнение предложенного алгоритма GLM с традиционно используемой аппроксимацией функцией Лоренца (LCF). Результаты экспериментов показали, что для всех рассмотренных соотношений SNR и шагов сканирования алгоритм GLM дает лучший результат, чем традиционный алгоритм LCF.
Рассмотренные в данной главе подходы к применению методов машинного обучения в области бриллюэновской оптической рефлектометрии явно показывают, что на данный момент не достигнуты пределы точности и быстродействия систем распределенного мониторинга. Разнообразие подходов и архитектур систем искусственного интеллекта открывает для исследователей широкое поле для экспериментов.
6. ВЫВОДЫ И БУДУЩИЕ РАБОТЫ
В данном обзоре были представлены различные типы и разновидности методов детектирования центральной частоты лоренцевой функции спектра РМБ. Большинство из них разрабатывалось для решения отдельных задач, поэтому каждый метод имеет свои положительные и отрицательные стороны для эксплуатации в каждом отдельном случае. Бурное развитие некоторых областей науки и техники, а также их все увеличивающаяся интеграция с фотоникой порождают вызовы для существующих техник экстракции BFS и создают предпосылки для появления новых методов. В последнее время получают широкое распространение задачи так называемого структурного мониторинга особо ответственных зданий и сооружений (Structural Health Monitoring – SHM) [91, 92], где в ходе отдельных экспериментальных работ к сенсорным волокнам могут применяться растягивающие нагрузки, близкие к разрывным, что ведет к резкому увеличению потерь оптического сигнала, а следовательно, резкому снижению отношения сигнал/шум. Практика показала, что корреляционные методы при обработке таких спектров дают более высокие точности нахождения BFS. При самых низких отношениях сигнал/шум, наблюдаемых, например, при наличии цифровых помех или во время исследования/мониторинга специальных оптических волокон, таких как активные или иные световоды в схемах с высокими потерями [11, 16], сравнительно неплохо проявляет себя метод обратной корреляции. Напротив, когда отношение сигнал/шум выше 20 дБ, целесообразно использовать аппроксимацию лоренцевой функцией. Такие условия создаются в стандартных системах мониторинга, что и обеспечило популярность метода LCF. Из рассуждений, приведенных выше, несложно заключить, что самая первая стадия обработки спектра должна включать в себя определение отношения сигнал/шум. Однако характеризация отдельного BGS на этом заканчиваться не должна. В ряде случаев, таких как, например, уже описанное появление цифровых помех, а также при других искажениях лоренцевой функции (которые могут возникнуть при зондировании волокна короткими импульсами), целесообразно заранее исключить вариант использования метода LCF. Таким образом, оценка формы полезного сигнала и отношения сигнал/шум должна быть отправной точкой при обработке спектров РМБ.
Однако появившиеся в последнее время методы искусственного интеллекта в некоторых случаях претендуют на универсальность. Опровергнуть гипотезу этой возможной универсальности можно обзором современных работ, включающих в себя комбинацию машинного обучения и уже хорошо известных методов обработки BGS (справедливости ради необходимо отметить, что комбинируются и многие другие методы [93, 94]). Возможно, дополнительное подключение консервативных методов обусловлено существующим на сегодняшний день неполным совершенством нейросетевых алгоритмов, и их полное доминирование в данной научной области является лишь вопросом времени.
Еще одним важным параметром, характеризующим методы получения BFS, является их производительность. В простейшем случае сравнение методов по данному критерию можно осуществить простым подсчетом количества математических операций Nc, необходимых для обработки определенного числа точек N в BGS, заданных одинаковым типом данных. Для каждого метода зависимость Nc = f(N) будет задана своей функцией, не всегда линейной, что не позволит однозначно экстраполировать полученные в сравнении результаты на все практически возможные значения N. К тому же в большинстве литературных источников сравнивается производительность двух или трех методов, и осуществляется такое сравнение обычно на собственных, новых исходных данных с использованием компьютеров с присущей именно им аппаратной конфигурацией. То же касается и параметров точности – по этой же причине их достаточно сложно сравнить по разным работам. В отсутствие иных данных сопоставление различных способов получения величины BFS возможно, скорее, на качественном уровне. Такое сравнение было сделано авторами настоящего обзора с использованием нескольких литературных источников [22, 57]. Оно представлено в табл. 1. Аппаратные и программные меры повышения SNR BGS в табл. 1 не включены ввиду сложности их объединения в разумное число классов.
Таблица 1.
Сравнение методов экстракции BFS
| Показатель / метод | LCF | CM | ML | ||
|---|---|---|---|---|---|
| Точность детектирования BFS | при SNR < 0 дБ | 2–6 МГц | 1.8–5 МГц | ||
| при SNR > 20 дБ | Доли мегагерц | Несколько мегагерц | Несколько мегагерц | ||
| при наличии неполного BGS | 320 МГц – 7 ГГц | 7–20 МГц | N/A | ||
| при BGS “нелоренцевой” формы | Доли мегагерц – единицы гигагерц | Доли мегагерц | N/A | ||
| Скорость обработки | Зависит от алгоритма | BWC/ ССM высокая |
CRPA низкая |
Высокая | |
| N/A – неприменимо, либо, по информации авторов, исследований не проводилось | |||||
Авторы данной обзорной работы полагают, что точное беспристрастное количественное сравнение различных методов при обработке единого специально разработанного массива BGS принципиально возможно. Его необходимо осуществлять в рамках масштабной коллаборации различных научных групп. Авторы данного обзора призывают к взаимодействию разработчиков методов экстракции BFS из массивов BGS. Если такое научное взаимодействие состоится, авторы надеются сосредоточить все свои усилия на его воплощении и координации.
Список литературы
Власов А.А., Плотников М.Ю., Аширов А.Н., Алейник А.С., Никитенко А.Н. // ПТЭ. 2020. № 4. С. 58. https://doi.org/10.31857/S0032816220040345
Бочкова С.Д., Волковский С.А., Ефимов М.Е., Дейнека И.Г., Смирнов Д.С., Литвинов Е.В. // ПТЭ. 2020. № 4. С. 73. doi 10.31857/S003281622004023
Власов А.А., Варламов А.В., Аширов А.Н., Кикилич Н.Е., Алейник А.С. // ПТЭ. № 4. С. 67. https://doi.org/10.31857/S0032816220040357
Кузнецов П.И., Судас Д.П., Савельев Е.А. // ПТЭ. 2020. № 4. С. 83. https://doi.org/10.31857/S0032816220040308
Фадеев К.М., Ларионов Д.Д., Жикина Л.А., Минкин А.М., Шевцов Д.И. // ПТЭ. 2020. № 4. С. 115. https://doi.org/10.31857/S003281622005002X
Таранов М.А., Горшков Б.Г., Жуков К.М., Гринштейн М.Л. // ПТЭ. № 4. С. 90. https://doi.org/10.31857/S0032816220040199
Таранов М.А., Горшков Б.Г., Алексеев А.Э. // ПТЭ. № 4. С. 96. https://doi.org/10.31857/S0032816220040187
Трегубов А.В., Приходько В.В., Алексеев А.С., Жуков А.В., Новиков С.Г., Светухин В.В. // ПТЭ № 4. С. 109. https://doi.org/10.31857/S0032816220050067
Спирин В.В., Lόpez-Mercado C.A., Wuilpart M., Коробко Д.А., Золотовский И.О., Фотиади А.А. // ПТЭ 2020. № 4. С. 40. https://doi.org/10.31857/S0032816220050055
Ткаченко А.Ю., Смолянинов Н.Н., Скворцов М.И., Лобач И.А., Каблуков С.И. // ПТЭ. 2020. № 4. С. 102. https://doi.org/10.31857/S0032816220040333
Белокрылов М.Е., Константинов Ю.А., Латкин К.П., Клод Д., Селезнев Д.А., Степин А.А., Конин Ю.А., Щербакова В.А., Кашина Р.Р. // ПТЭ. 2020. № 4. С. 45. https://doi.org/10.31857/S0032816220050018
Барков Ф.Л., Константинов Ю.А., Бурдин В.В., Кривошеев А.И. // ПТЭ. 2020. № 4. С. 51. https://doi.org/10.31857/S0032816220040229
Gorshkov B.G., Yüksel K., Fotiadi A.A., Wuilpart M., Korobko D.A., Zhirnov A.A., Stepano, K.V., Turov A.T., Konstantinov Y.A., Lobach I.A. // Sensors. 2022. V. 22. P. 1033. https://doi.org/10.3390/s22031033
Hotate K. // Applied Sciences. 2019. V. 9(1). P. 187. https://doi.org/10.3390/app9010187
Листвин А.В., Листвин В.Н. Рефлектометрия оптических волокон. М.: ЛЕСАРарт, 2005.
Smirnov A.S., Burdin V., Konstantinov Y.A., Petukhov A.S., Drozdov I.R., Kuz’minykh Y.S., Besprozvannykh V.G. // Quantum Electronics. 2015. V. 45. P. 66. https://doi.org/10.1070/QE2015V045N01ABEH015634
Nordin N.D., Zan M., Abdullah F. // Photonics. 2020. V. 7. https://doi.org/10.3390/photonics7040079
Zou W., Long X., Chen J. Brillouin Scattering in Optical Fibers and Its Application to Distributed Sensors //Advances in Optical Fiber Technology: Fundamental Optical Phenomena and Applications / Eds. by M. Yasin, H. Arof, S.W. Harun. IntechOpen, 2015 https://doi.org/10.5772/59145
Urricelqui Javier, Soto Marcelo, Thévenaz Luc // 24th International Conference on Optical Fibre Sensors. Proc. of SPIE. 2015. V. 9634. P. 963434. https://doi.org/10.1117/12.2195298
Wang Yuan, Chen Liang, Bao Xiaoyi // Optics Letters. 2021. V. 46. P. 5774. https://doi.org/10.1364/OL.441815
Zheng H., Zhu T., Zhang J. // Optical Fiber Sensors Conference. OSA Technical Digest / Special Eds. G. Cranch, A. Wang, M. Digonnet, and P. Dragic. Optica Publishing Group, 2020. P. T3.58. https://doi.org/10.1364/OFS.2020.T3.58
Barkov F.L., Konstantinov Yu.A., Krivosheev A.I. // Fibers. 2020. V. 8. № 9. P. 60. https://doi.org/10.3390/fib8090060
Li Cunlei, Lu Yuangang, Zhang Xuping, Wang Feng // Electronics Letters. 2012. V. 48 (18). P. 1139. https://doi.org/10.1049/el.2012.1248
Lalam N., Ng W.P., Dai X., Wu Q., Fu Y.Q. // 25th Optical Fiber Sensors Conference (OFS). 2017. V. 10323. P. 1032366. https://doi.org/10.1117/12.2263294
Lalam N., Ng W.P., Dai X., Wu Q., Fu Y.Q. // Measurement Science and Technology. 2018. V. 29. P. 025101. https://doi.org/10.1088/1361-6501/AA9C6E
Lalam N., Ng W.P., Dai X., Wu Q., Fu Y.Q. // Journal of Lightwave Technology. 2018. V. 36. P. 1084. https://doi.org/10.1109/JLT.2017.2766765
Wang F., Li C., Zhao X., Zhang X. // Applied optics. 2012. V. 51. Iss. 2. P. 176. https://doi.org/10.1364/AO.51.000176
Zhao Y., Zhang Y., Han B.T., Qin C., Wang Q. // Journal of Lightwave Technology. 2013. V. 31. P. 334551. https://doi.org/10.1109/JLT.2013.2282164
Wang Q., Zhao Y., Han B.T., Zhang Y., Wang P., Wang L. // Instrumentation Science & Technology. 2014. V. 42. P. 290. https://doi.org/10.1080/10739149.2013.860542
Cao Y., Ye Q., Pan Z., Cai H., Qu R., Fang Z., Zhao H. // 23rd International Conference on Optical Fibre Sensors. (Santander, Spain) 2014. V. 9157. 915764. https://doi.org/10.1117/12.2059283
Urricelqui J., López-Fernandino F., Sagues M., Loays-sa A. // Journal of Lightwave Technology. 2015. V. 33. P. 2633. https://doi.org/10.1109/JLT.2015.2401133
Floch S.L., Sauser F. // 25th Optical Fiber Sensors Conference (OFS). 2017. V. 10323. P. 10323OL. https://doi.org/10.1117/12.2261943
Lu Y., Yao Y., Zhao X., Wang F., Zhang X. // Optics Communications. 2013. V. 297. P. 48. https://doi.org/10.1016/J.OPTCOM.2013.01.080
Zhang Y., Wu X., Ying Z., Zhang X. // Electronics Letters. 2014. V. 50. P. 1014. https://doi.org/10.1049/EL.2014.0909
Bai Q., Xue B., Gu H., Wang D., Wang Y., Zhang M., Jin B., Wang Y. // IEEE Photonics Technology Letters. 2019. V. 31. P. 283. https://doi.org/10.1109/LPT.2018.2889812
Hao Y., Ye Q., Pan Z., Cai H., Qu R., Yang Z. // Optics and Laser Technology. 2013. V. 46. P. 37. https://doi.org/10.1016/J.OPTLASTEC.2012.04.025
Xia L., Hu J., Zhao Q., Chen J.J., Wu P., Zhang X. // IEEE Sensors Journal. 2016. V. 16. P. 2180. https://doi.org/10.1109/JSEN.2015.2509474
Xia H., Mingjia S., Shentu G., Wang C., Qiu J., Zheng M., Xie X., Dou X., Zhang Q., Pan J. // Optics Communications. 2016. V. 381. P. 37. https://doi.org/10.1016/J.OPTCOM.2016.06.050
Saxena M.K., Raju S.J., Arya R., Pachori R.B., Ravindranath S., Kher S., Oak S.M. // Optics and Laser Technology. 2015. V. 65. P. 14. https://doi.org/10.1016/J.OPTLASTEC.2014.06.012
Wei H., Wang Y., Wang Q., Lu X., Wu H., Fan L., Li C., Xin X. // Electronics. 2021. V.10. P. 1334. https://doi.org/10.3390/electronics10111334
Qin Z., Chen L. Bao X. // Opt. Express. 2012. V. 20. P. 20459. https://doi.org/10.1364/OE.20.020459
Zhang Z.-H., Hu W.-L., Yan J.-S., Zhang P. // International Symposium on Photoelectronic Detection and Imaging 2013: Fiber Optic Sensors and Optical Coherence Tomography. Proc. SPIE. V. 8914. 2013. P. 891408. https://doi.org/10.1117/12.2032008
Xu H.-Z., Zhang D. // 2006 International Conference on in Machine Learning and Cybernetics. 13–16 August 2006. P. 4040. https://doi.org/10.1109/ICMLC.2006.258858
Saxena M.K., Raju S.J., Arya R., Ravindranath S., Kher S., Oak S.M. // Measurement, 2014. V. 47. P. 345. https://doi.org/10.1016/J.MEASUREMENT.2013.09.001
Meng Yanjie, Zha Jianfeng // Optics Communications. 2018. V. 437. P. 219. https://doi.org/10.1016/j.optcom.2018.12.073
Huan Wu, Liang Wang, Zhiyong Zhao, Nan Guo, Chester Shu, Chao Lu // Opt. Express. 2018. V. 26. P. 5126. https://doi.org/10.1364/OE.26.005126
Zhang Yuyang, Lu Yuangang, Zhang Zelin, Wang Jiming, He Chongjun, Wu Tong // Optics and Lasers in Engineering. 2020. V. 125. P. 105865. https://doi.org/10.1016/j.optlaseng.2019.105865
Soto Marcelo, Ramírez Jaime, Thévenaz Luc // Journal of Lightwave Technology. 2018. V. 36. № 4. P. 1168. https://doi.org/10.1109/JLT.2017.2750398
Konstantinov Yu.A., Kryukov I.I., Pervadchuk V.P., Toroshin A.Yu. // Quantum Electronics. 2009. V. 39(11). P. 1068. doi 101070/QE2009v039n11ABEH014171
Froggatt M.E., Gifford D.K., Kreger S., Wolfe M., Soller B.J. // Journal of Lightwave Technology. 2006. V. 24. P. 4149. https://doi.org/10.1109/JLT.2006.883607
Farahani M.A., Castillo-Guerra E., Colpitts B.G. // Opt. Lett. 2011. V. 36. № 21. P. 4275. https://doi.org/10.1364/OL.36.004275
Farahani M.A., Castillo-Guerra E., Colpitts B.G. // IEEE Sens. J. 2013. V. 13. № 12. P. 4589. https://doi.org/10.1109/JSEN.2013.2271254
Brown A.W., Colpitts B.G., Brown K. // J. Lightwave Technol. 2007. V. 25(1). P. 381. https://doi.org/10.1109/JLT.2006.886672
Ravet F., Zou L., Bao X., Chen L., Huang R.F., Khoo H.A. // Sensing issues in civil structural health monitoring. 2005. P. 515. https://doi.org/10.1007/1-4020-3661-2
Кривошеев А.И., Константинов Ю.А., Барков Ф.Л., Первадчук В.П. // ПТЭ. 2021. № 5. С. 84. https://doi.org/10.31857/S0032816221050062
Krivosheev A.I., Konstantinov Yu.A., Pervadchuk V.P., Barkov F.L. // Applied Mathematics and Control Sciences. 2021. № 3. P. 956. https://doi.org/10.15593/2499-9873/2021.3.05
Shahna M Haneef, Zhisheng Yang, Luc Thévenaz, Deepa Venkitesh, Balaji Srinivasan // Opt. Express. 2018. V. 26. Iss. 11. P. 14661. https://doi.org/10.1364/OE.26.014661
Mi Li, Wenli Shen, Wenchen Li, Hao Li, Yanqiu Tang, Yuejiang Song, Xuping Zhang // Optics Communications. 2019. V. 438. P. 1. https://doi.org/10.1016/j.optcom.2018.12.066
Stepanov K.V., Zhirnov A.A., Koshelev K.I., Chernutsky A.O., Khan R.I., Pnev A.B. // Sensors. 2021. V. 21. Iss. 21. P. 7077. https://doi.org/10.3390/s21217077
Stepanov K., Zhirnov A., Chernutsky A., Koshelev K., Pniov A., Lopunov A., Butov O. // Sensors. 2020. V. 20. Iss. 22. P. 6431. https://doi.org/10.3390/s20226431
Su L., Chen B., Liu X., Zhou Z., Song M., Wang Y., Yang J. // Asia Communications and Photonics Conference. 2021. OSA Technical Digest (Optica Publishing Group, 2021). Paper T4A.238. https://doi.org/10.1364/ACPC.2021.T4A.238
Sandstrom L., Joffe D., Bekken G., Brooks J., Schneider K., Goodson R. // Optical Fiber Communication Conference. OFC 2013. Paper OW3G.3. https://doi.org/10.1364/OFC.2013.OW3G.3
Wang Bing-Jie, Wang Anbang, Wang Hua-Kui, Wang Yuncai // Symposium on Photonics and Optoelectronics. 2012. P. 1. https://doi.org/10.1109/SOPO.2012.6271059
Elgaud M., Zan M., Abushagur A., Hamzah A.E., Mokhtar M.H.H., Arsad I.D.N., Bakar A.A.A. // Sensors. 2021. V. 21. Iss. 13. P. 4299. https://doi.org/10.3390/s21134299
Hotate K. // Sensors. 2014. V. 2014. P. 142. https://doi.org/10.1109/ICSENS.2014.6984953
Choi B.-H., Seo D.-C., Kwon Y.-S., Kwon I.-B. // Appl. Sci. 2021. V. 11. P. 10247. https://doi.org/10.3390/app112110247
Marcelo A. Soto, Sébastien Le Floch, Luc Thévenaz // Opt. Express. 2013. V. 21. P. 16390. https://doi.org/10.1364/OE.21.016390
Soto M.A., Bolognini G., Di Pasquale F., Thévenaz L. // Opt. Lett. 2010. V. 35(2). P. 259. https://doi.org/10.1364/OL.35.000259
Liang H., Li W., Linze N., Chen L., Bao X. // Opt. Lett. 2010. V. 35(10). P. 1503. https://doi.org/10.1364/OL.35.001503
Soto M.A., Bolognini G., Di Pasquale F. // Opt. Express. 2010. V. 18(14). P. 14878. https://doi.org/10.1364/OE.18.014878
Soto M.A., Bolognini G., Di Pasquale F. // Opt. Lett. 2011. V. 36(2). P. 232. https://doi.org/10.1364/OL.36.000232
Soto M.A., Bolognini G., Di Pasquale F. // Opt. Express. 2008. V. 16(23). P. 19097. https://doi.org/10.1364/OE.16.019097
Nazarathy M., Newton S.A., Giffard R.P., Moberly D.S., Sischka F., Trutna W.R., Foster S. // J. Lightwave Technol. 1989. V. 7(1). P. 24. https://doi.org/10.1109/50.17729
Zan M., Elgaud M., Zainuddin A., Kadhim A., Mokhtar M.H., Arsad N., Bakar A.A. // Journal of Physics: Conference Series. 2021. V. 1892. P. 012034. https://doi.org/10.1088/1742-6596/1892/1/012034
Li Chengbin, Li Yongqian // 5th International Conference on Wireless Communications. Networking and Mobile Computing. (Beijing, China) 2009. https://doi.org/10.1109/WICOM.2009.5303692
Lourakis M.L., Argyros A.A. // 10th IEEE International Conference on Computer Vision (ICCV). (Beijing, China) 2005. V. 2. P. 1526. https://doi.org/10.1109/ICCV.2005.128
Liang Yongxin, Jiang Jialin, Chen Yongxiang, Zhu Richeng, Lu Chongyu, Wang Zinan // IEEE Access. 2019. V. 7. P. 68034. https://doi.org/10.1109/ACCESS.2019.2919138
Lu Chongyu, Liang Yongxin, Jia Xinhong, Fu Yu, Liang Jing, Wang Zinan // IEEE Sensors Journal. 2020. V. 20. P. 8559. https://doi.org/10.1109/JSEN.2020.2985550
Azad Abul Kalam, Wang Liang, Guo Nan, Lu Cheng, Tam Hwa // Electronics Letters. 2015. V. 51. P. 1578. https://doi.org/10.1049/el.2015.1359
Azad Abul Kalam, Wang Liang, Guo Nan, Lu Cheng, Tam Hwa // Opto-Electronics and Communications Conference (OECC). (Shanghai, China) 2015. P. 1. https://doi.org/10.1109/OECC.2015.7340143
Azad Abul Kalam, Wang Liang, Guo Nan, Tam Hwa, Lu Chao // Optics Express. 2016. V. 24. P. 6769. https://doi.org/10.1364/OE.24.006769
Wang Liang, Wang Biwei, Jin Chao, Guo Nan, Yu Changyuan, Lu Chao // 16th International Conference on Optical Communications and Networks (ICOCN). (Wuzhen, China) 2017. P. 1. https://doi.org/10.1109/ICOCN.2017.8121527
Li Yongqian, Wang Jianjian // Optical Fiber Technology. 2020. V. 58. P. 102314. .https://doi.org/10.1016/j.yofte.2020.102314
Ruiz-Lombera R., Serrano Mirapeix J., Lopez-Higuera J.-M. // Proc. of IEEE Sensors. 2014. P. 1539. https://doi.org/10.1109/ICSENS.2014.6985309
Ruiz-Lombera R., Piccolo A., Rodriguez-Cobo L., López-Higuera J.-M., Mirapeix J. // 25th International Conference on Optical Fiber Sensors. 2017. V. 10323. Paper 103237Z. https://doi.org/10.1117/12.2265435
Ruiz-Lombera R., Fuentes A., Rodriguez-Cobo L., Lopez-Higuera J.-M., Mirapeix J. // Journal of Lightwave Technology. 2018. V. 36 P. 2114. https://doi.org/10.1109/JLT.2018.2805362
Wu Hao, Wan Yangyang, Tang Ming, Chen Yunjin, Zhao Can, Liao Ruolin, Chang Yiqing, Fu Songnian, Shum Ping, Liu Deming // Journal of Lightwave Technology. 2019. V. 37. P. 2648. https://doi.org/10.1109/JLT.2018.2876909
Wu H., Wang L., Zhao Z., Shu C., Lu C. // IEEE Photonics Journal. 2018. V. 10. P. 1. https://doi.org/10.1109/JPHOT.2018.2858235
Wu Huan, Wang Liang, Guo Nan, Shu Chester, Lu Chao // Journal of Lightwave Technology. 2017. V. 35 P. 4159. https://doi.org/10.1109/jlt.2017.2739421
Nordin N.D., Zan M.S., Abdullah F. // Optical Fiber Technology. 2020. V. 58. P. 102298. https://doi.org/10.1016/j.yofte.2020.102298
Matveenko V.P., Kosheleva N., Serovaev G. // Mechanics of Solids. 2021. V. 56. P. 885. https://doi.org/10.3103/S0025654421060121
Matveenko V., Kosheleva N., Serovaev G., Fedorov A. // Sensors. 2021. V. 21. P. 5050. https://doi.org/10.3390/s21155050
Qian Xianyang, Wang Zinan, Wang Song, Xue Naitian, Sun Wie, Zhang Li, Zhang Bin, Rao Yunjiang // Sixth European Workshop on Optical Fibre Sensors. 2016. P. 9916. Paper 99162S. https://doi.org/10.1117/12.2236441
Nordin N.D., Abdullah F., Zan M.S.D., A Bakar A.A., Krivosheev A.I., Barkov F.L., Konstantinov Y.A. // Sensors. 2022. V. 22 P. 2677. https://doi.org/10.3390/s22072677
Дополнительные материалы отсутствуют.
Инструменты
Приборы и техника эксперимента