

Прикладная математика и механика, 2022, T. 86, № 3, стр. 341-348
Перехват баллистических ракет на активном участке траектории
А. В. Кубышкин 1, 2, *, И. Н. Белоконь 2, В. В. Карагодин 2
1 Московский физико-технический институт
Долгопрудный, Россия
2 ВНИИ автоматики им. Н.Л. Духова
Москва, Россия
* E-mail: akubyshkin@yandex.ru
Поступила в редакцию 22.12.2021
После доработки 09.02.2022
Принята к публикации 09.02.2022
- EDN: MYHWWU
- DOI: 10.31857/S0032823522030079
Аннотация
Статья посвящена анализу возможности перехвата стартующих баллистических ракет американскими противоракетами морского базирования. По результатам математического моделирования показано, что в случае использования на ступени перехвата жидкостных двигательных установок обеспечивается существенное расширение зон перехвата. При этом стартовое окно возможных пусков разделяется на две пространственно разнесенных области, что обеспечивает принципиальную возможность оптимизации как средств защиты, так и нападения.
Несмотря на неизбежную политизированность вопросов, связанных со стратегическим сдерживанием и стратегической стабильностью, в зарубежных и отечественных научно-технических изданиях периодически публикуются прогнозные оценки технического облика перспективных вооружений, основанные на общефизических закономерностях с реалистичными исходными данными [1–6].
В этой связи важной проблемой считается исследование возможности поражения баллистических ракет (БР) на активном участке траектории (АУТ) оружием направленной энергии и противоракетами противника. На современном этапе американские специалисты [4, 5] занимаются этой проблемой в рамках повышения эффективности собственной системы противоракетной обороны (ПРО), а отечественные [1–3] – для разработки широкого спектра симметричных и ассиметричных вариантов парирования соответствующих угроз с целью поддержания стратегической стабильности.
Несмотря на жесткие пространственно-временные ограничения, принципиальным преимуществом перехвата БР на АУТ американские специалисты считают устранение необходимости селекции и перехвата боеголовок среди многочисленных элементов боевого оснащения ракет после их отделения [6]. Это поддерживает их интерес к проблеме в течение нескольких десятилетий, генерируя всё новые средства и способы такого перехвата [4–6].
Потенциальная возможность перехвата БР на АУТ подтверждается отечественными специалистами, проанализировавшими, в частности, некоторые сценарии применения американских противоракет (ПР) морского базирования [7, 8]. В настоящее время на вооружении ВМС США находится значительное количество противоракет “Стандарт-3” (SM-3 – Standard Missile) версий Block IA/B и начато развертывание единичных образцов усовершенствованной версии Block IIA. Так как в доступных источниках сведения о последней версии ПР носят предположительный характер, остановимся на оценке возможностей ПР “Стандарт-3” Block IA/B, по которой имеется более детальная техническая информация.
Основные летно-технические характеристики (ЛТХ) этого типа противоракет наиболее подробно рассмотрены в работах [9–12]. Опубликованные в них весовые сводки ракетных блоков (РБ) маршевых ступеней и некоторые другие параметры двигательных установок (ДУ) соответствующих моделей ПР сведены в табл. 1. В последнем столбце этой таблицы представлена модель противоракеты, разработанная авторами на основе сравнительного анализа и корректировки результатов публикаций [9–12]. Таблица 1 включает также оцененные значения максимальной скорости ПР и высоты подъема ступени перехвата (СП) на пассивном участке траектории, а также некоторые другие параметры.
Таблица 1.
Характеристики моделей противоракет SM-3 Block IA/B
| Характеристики вариантов ПР | [9] | [10] | [11] | [12] | Наша оценка |
|---|---|---|---|---|---|
| Стартовый вес, кг | 1420 | 1400 | 1315 | 1500 | 1500 |
| Полезная нагрузка, кг | 100 | 33 | 5 | 130 | 21.3 |
| Макс. скорость, м/с | 3017 | 3538 | 5514 | 3576 | 3400 |
| Макс. высота, км | 623 | 815 | 2256 | 826 | 744 |
| РБ Мк72, кг | 700 | 712 | 700 | 700 | 724 |
| – топливо, кг | 457 | 468 | 457 | 460 | 460 |
| – конструкция, кг | 243 | 244 | 243 | 240 | 264 |
| – тяга ДУ, кг | 14 657 | 19 375 | 16 315 | 19 122 | 19 462 |
| – удельная тяга, с | 256.6 | 248 | 285.6 | 270.2 | 275 |
| – время работы, с | 8 | 6 | 8 | 6.5 | 6.5 |
| РБ Мк104, кг | 500 | 488 | 500 | 500 | 556 |
| – топливо, кг | 372 | 360 | 372 | 380 | 380 |
| – конструкция, кг | 128 | 128 | 128 | 120 | 190 |
| – тяга ДУ, кГ | 5115 | 4895 | 5311 | 5425 | 5320 |
| – удельная тяга, с | 275 | 275 | 285.6 | 285.5 | 280 |
| – время работы, с | 20 | 20 | 20 | 20 | 20 |
| РБ Мк136, кг | 110 | 167 | 110 | 170 | 189 |
| – топливо, кг | 75 | 83 | 75 | 136 | 93 |
| – конструкция, кг | 35 | 82 | 35 | 34 | 86 |
| – тяга, кг | 687 | 1173 | 714 | 2080 | 1325 |
| – удельная тяга, с | 275 | 275.9 | 285.6 | 305.9 | 285 |
| – время работы, с | 30 | 10+10 | 30 | 20 | 10+10 |
Приведенные ниже характеристики кинетической СП приняты на основании представленных в [13] данных о конструкции СП и ее импульсной твердотопливной ДУ:
– начальный вес СП 21.3 кг;
– запас скорости 530 м/с;
– удельная тяга ДУ 218.2 с;
– количество израсходованного топлива за первые 15 с на участке работы ДУ в режиме стабилизации 1.752 кг и на втором участке в последующие 10 с – 2.921 кг.
При компьютерном моделировании процесса перехвата расчет траекторий БР и ПР производился численным интегрированием системы дифференциальных уравнений движения методом Рунге–Кутты. Данная модель основана на следующих допущениях:
– БР, ПР и СП рассматриваются как материальные точки переменной массы;
– модель Земли – сферическая невращающаяся с центральным гравитационным полем и стандартной атмосферой ГОСТ 4401-81;
– точка старта ПР находится в плоскости полета цели на заданном варьируемом расстоянии от точки старта БР, то есть рассматриваются плоские траектории движения БР и ПР;
– фазовые параметры перехватываемой цели и перехватчика не содержат ошибок;
– отработка управляющих ускорений производится без ошибок и не учитывает конструктивные особенности ДУ СП и головки самонаведения (ГСН).
Таким образом, в данном случае учитываются только методические ошибки метода наведения, в качестве которого рассмотрено наведение по мгновенному промаху, и достаточность энергетических и маневренных характеристик ПР и СП для непосредственного сближения с целью на расстояние не более 0.5 м.
На участке автономного полета закрытой носовым обтекателем ступени перехвата в плотных слоях атмосферы направление и величина силы тяги выбираются из условия, при котором обеспечивается требуемое для наведения на цель командное ускорение СП. Для этого варьированием ориентации продольной оси СП в пределах ограничения на углы атаки определяется невязка между направлениями требуемого ускорения и ускорения от действия полной аэродинамической силы, и решается нелинейная задача поиска угла тангажа, при котором невязка сводится к нулю. Затем находится величина силы тяги, компенсирующая разность между требуемым ускорением и ускорением, вызванным набегающим воздушным потоком. После сброса обтекателя силовое воздействие на СП со стороны атмосферы не учитывается. Момент сброса обтекателя определяется по снижению скоростного напора до величины, соответствующей окончанию АУТ при вертикальном полете.
На участке работы ракетных двигателей на твердом топливе (РДТТ) маршевых ступеней ПР с нерегулируемой тягой управление движением осуществляется изменением ориентации продольной оси ПР по направлению вектора командного ускорения.
Далее в качестве примера представлены результаты математического моделирования сценариев перехвата гипотетической двухступенчатой жидкостной баллистической ракеты “L” с моноблочной головной частью, характеристики которой приведены в таблице 2 [4]. Активный участок настильной траектории пуска этой БР на дальность 7000 км продолжительностью 233.6 с заканчивается на удалении 432 км от точки старта на высоте 236 км.
Таблица 2.
Характеристики жидкостной ракеты (модель “L” из [4])
| Характеристика | Ступень 2 | Ступень 1 | Итого |
|---|---|---|---|
| Дальность стрельбы, тыс. км. | – | – | 12 |
| Масса полезной нагрузки, т | – | – | 2.5 |
| Масса обтекателя, кг | – | – | 66 |
| Стартовая масса, т | 41.5 | 201 | 201 |
| Конечная масса, т | 6.39 | 57.4 | – |
| Масса конструкции (сухая), т | 3.86 | 15.9 | – |
| Масса топлива, т | 35 | 143 | – |
| Удельный импульс тяги, с | 282 | 275 | – |
| Средняя тяга, кН | 810 | 3226 | – |
| Время работы, с | 120 | 120 | 240 |
Примечание. В таблице 2 принята оригинальная (американская) классификация ступеней.
На рис. 1 показано рассчитанное стартовое окно пусков ПР. По горизонтальной оси отложено расстояние вдоль трассы полета БР от точки ее старта до точки старта противоракеты. По вертикальной – отсчитываемые от момента старта БР времена пусков ПР, при которых возможен перехват стартующей БР. Выходящие из начала координат прямые соответствуют времени появления цели над стартовым горизонтом ПР.
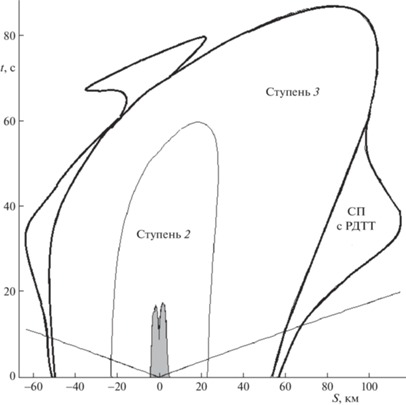
В зависимости от номера ступени ПР, осуществившей перехват, стартовое окно разбивается на несколько областей.
При пусках ПР непосредственно вблизи стартующей БР перехват оказывается невозможен, т.к. вследствие более высокой начальной тяговооруженности противоракета обгоняет цель (эта область на рис. 1 выделена серым цветом). При удалении от точки старта БР не далее 20–25 км сближение с целью происходит на этапе работы второй ступени ПР, если ее старт осуществляется не позднее нескольких десятков секунд после БР. В противном случае перехват осуществляется третьей ступенью, область досягаемости которой ограничена запасом топлива.
Внешний контур на рис. 1 соответствует предельным возможностям ступени перехвата. Дополнительные зоны возникают на догоняющих траекториях при пусках ПР с небольших расстояний в противоположном направлении от полета БР, и при перехвате цели в плотных слоях атмосферы на высотах не более 40 км за счет использования аэродинамического качества закрытой носовым обтекателем ступени перехвата. Возможности СП здесь несколько расширены, т.к. перехват целей в атмосфере и за ее пределами подразумевает различные типы СП. Следует отметить, тем не менее, что роль самой ступени перехвата в расширении стартового окна незначительна по причине малой начальной перегрузки (~1 g) и ограниченного времени работы ее твердотопливной ДУ, за которое СП не успевает приблизиться к цели.
Использование на СП жидкостной ДУ с возможностью регулирования секундного расхода топлива позволяет увеличить время работы ДУ и, следовательно, расширить область досягаемости целей. Примерами применения жидкостной ДУ являются ступень перехвата израильской ПР Arrow 3 [14], у которой ДУ с поворотным соплом позволяет регулировать силу тяги, секундный расход топлива и время работы, а также варианты СП в американском патенте на многоэлементную ступень перехвата [15], характеристики которых по начальному весу и запасу скорости соизмеримы с параметрами СП ПР “Стандарт-3” Block IA/B.
Благодаря применению жидкостной ДУ на ступени перехвата появляется возможность осуществлять пуски на бóльшем удалении от точки старта БР (рис. 2). Так, при запасе топлива, удельной тяге и максимальной тяговооруженности (~3 g) как у СП ПР “Стандарт-3” Block IA/B, в случае оснащения ее двигательной установкой на жидком топливе пуски ПР могут проводиться с расстояния до 420 км от точки старта БР. При этом в моменты пусков цель находится над горизонтом, а перехват происходит на высотах более 70 км на участке полета второй ступени БР до 183 секунды полета, когда скорость полета и ускорение БР начинают превосходить скорость и ускорение ступени перехвата. Кроме того, вследствие низкой тяговооруженности рассмотренного примера СП и резкого изменения ускорения цели в момент отделения второй ступени БР ее перехват в течение нескольких секунд непосредственно после этого оказывается невозможным. По этой причине стартовое окно возможных пусков ПР разделяется на две области. На рис. 2 появившаяся благодаря использованию жидкостной ДУ дополнительная область и незначительное расширение по этой же причине сравнительно с первой областью, представленной на рис. 1 вариантом СП с РДТТ, выделены серым цветом.

Выводы.
1. Американские противоракеты морского базирования типа “Стандарт-3” Block IA/B представляют потенциальную опасность для стартующих по настильным траекториям баллистических ракет с протяженным активным участком, и, в первую очередь, для стратегических ракет морского базирования вследствие ограниченного несколькими сотнями километров расстояния от точек пусков ПР до точек старта БР.
2. При пусках противоракет с удаления не более 100 км от точки старта БР перехват целей происходит, в основном, на высотах не более 70 км на участке работы маршевых ступеней ПР без задействования микродвигателей ступени перехвата.
3. Вследствие ограниченного времени работы твердотопливная ДУ ступени перехвата с заявленными фирмой-разработчиком характеристиками не способна обеспечить эффективный перехват БР на активном участке траектории в реалистичных сценариях.
4. Применение на СП жидкостной ДУ с регулируемым секундным расходом позволяет значительно увеличить (до нескольких сотен километров) расстояние, с которого возможен результативный пуск противоракет.
5. Вследствие резкого изменения ускорения баллистической цели на АУТ в момент разделения ее ступеней стартовое окно возможных пусков разделяется на две пространственно разнесенных области. Это увеличивает количество различных сценариев, выгодных как для защиты, так и для нападения, что позволяет в дальнейшем строить минимаксные модели конфликта интересов и прогноза исхода дуэльных ситуаций.
Список литературы
Кубышкин А.В., Белоконь И.Н. Расчетные методы восполнения недостающих данных о стратегических вооружениях США. Тезисы доклада // Сб. тр. 64-й Всероссийской научной конференции МФТИ. Москва–Долгопрудный–Жуковский. 2–4 декабря 2021. С. 229–230.
Кубышкин А.В., Белоконь И.Н., Степанов В.М. Разработка технологий оружия направленной энергии за рубежом // Технол. электромаг. совмест. 2021. № 2(77). С. 44–55.
Кубышкин А.В. Физико-технические основы стратегической стабильности. Спецкурс кафедры общей физики МФТИ. 2021. https://mipt.ru/education/chair/physics/dop_sem/
Barton D.K. Report of the American Physical Society study group on boost-phase intercept systems for national missile defense: Scientific and technical issues // Rev. Modern Phys. 2004. V. 76. № 3. P. 1–424.
Уилкенинг Д.А. Противоракетная оборона воздушного базирования на активном участке. М.: Наука и всеобщая безопасность, 2004. 67 с.
Postol T.A. A Russian-US Boost-Phase Defense To Defend Russia and the US from Postulated Rogue-State ICBMs. Carnegie Endowment for International Peace, 1999. 44 p.
Оружие ракетно-ядерного удара / Под ред. Яшина Ю.А. М.: МГТУ им. Н.Э. Баумана, 2009. 492 с.
Обидин Е.В. Расчет зоны перехвата баллистической ракеты М51 противоракетой Standard-3 mod.1B // Эл. сб. статей по материалам LXXIII студенческой международной научно-практической конференции. Новосибирск: АНС СибАК, 2019. № 1(72). С. 276–282. http://www.sibac.info/ archive/Technic/1(72).pdf
Hans Christian Gils. Untersuchung von Raketenabwehrszenarien auf Grundlage von Flugbahnsimulationen, SemZ Breitensee, Wien. https://www.bundesheer.at/organisation/beitraege/arwt/pdf
Sequard-Base P. Missile Defence for Europe, Comparison of Defence Concepts computed with the RAAB Model. Beitrage zum „Workshop zur Raketenabwehr“ vom 17.02.2010 in Wien. P. 36–64. https://www.bundesheer.at/ pdf_pool/publikationen/arwt_rakabwehr_2010.pdf
GenLt Mag. Apfalter Freyo. Geleitwort des Leiters der SIII Bereitstellung https://www.miliz.bundesheer.at/pdf_pool
Барабаш С.Д., Гладков М.С., Фуреев А.Н., Власюк В.В. Комплекс методик формирования и анализа исходных данных по фоно-целевой обстановке для средств систем ракетно-космической обороны // Эл. ж. Молодежный научно-технический вестник. 2014. № 1. http://sntbul.bmstu.ru/doc/687436.html
Закладний А.В. Определение максимальной зоны маневра кинетического перехватчика ракеты SM-3 в безвоздушном пространстве // Тр. Крыловского государственного научного центра. 2018; спец. вып. 1.
Israel and US test Arrow 3 ballistic missile interceptors. January 23, 2019. https://thedefensepost.com
Multiple kill vehicle (MKV) interceptor witch autonomous kill vehicles // United States Patent US 7,494,090 B2 Date of Patent: Feb. 24, 2009.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика