

Прикладная математика и механика, 2022, T. 86, № 5, стр. 695-709
Метод расчета пластин на взаимодействие с инерционной нагрузкой при переменной скорости движения
1 Российский университет транспорта (МИИТ)
Москва, Россия
* E-mail: ivaii011@mtu-net.ru
Поступила в редакцию 24.12.2021
После доработки 13.06.2022
Принята к публикации 20.06.2022
- EDN: QWKDZY
- DOI: 10.31857/S0032823522050101
Аннотация
Предлагается метод расчета пластин при действии инерционной нагрузки и ее движении с переменной скоростью. Рассмотрены тестовые задачи об ударном воздействии и движении с переменной скоростью по свободно опертой прямоугольной пластине груза при моделировании нелинейного контактного сближения его с пластиной. Рассмотрена задача о взаимодействии транспортной системы, при движении ее в режиме торможения после приземления на протяженную пластину, лежащую на упругом основании.
1. Введение. При решении задачи о действии на пластины простейших подвижных нагрузок – сосредоточенных и распределенных сил, при постоянных и переменных скоростях движения, применяются интегральные преобразования Фурье и Лапласа [1–4], для грузов находят применения численные решения интегральных уравнений относительно динамических реакций при построении рекуррентных соотношений [5, 6]. В случае действия равномерно распределенной инерционной нагрузки, при переменной скорости движения, путем изменения ее ступенями в работе [7] используется специальное разделение переменных. Методы расчета на действие простейшей инерционной подвижной нагрузки на прямоугольные пластины, как и для стержней, распадаются на два основных подхода. В первом случае используются обобщенные координаты при разложении прогиба по собственным формам балки или пластины и задача сводится к решению системы обыкновенных дифференциальных уравнений с переменными коэффициентами [8, 9]. Во втором случае, после расчленения системы “балка–груз” или “пластина–груз”, задача сводится к решению интегрального уравнения относительно динамической реакции груза [5, 6]. В [8, 9] увеличение числа удерживаемых форм приводит к увеличению порядка системы уравнений, в [5, 6] возникают трудности при решении интегральных уравнений, связанные с условной устойчивостью шаговых процедур. В статье для прямоугольных пластин на упругом основании предлагается метод – “узловых ускорений”, объединяющий между собой указанные подходы и ликвидирующий указанные у них недостатки, так как доступно учитывает любое необходимое число форм в разложении прогиба, и имеет, как и в методе интегральных уравнений [5, 6], разрешающую систему уравнений с минимальным числом неизвестных, при использовании безусловно-устойчивой схемы интегрирования, предложенной в [10]. Отметим, что метод “узловых ускорений” применяется и для стержневых систем [11–14]. Колебания пластин при действии подвижной инерционной нагрузки исследуются, привлекая метод конечных элементов (МКЭ) в [15–18], как для простейшей силовой нагрузки при косоугольных пластинах [15], так и с привлечением комплексов, например, ABAQUS и LS-DYNA [16–18]. Используя конечноэлементную базу этих комплексов, в [16–18] реализуется, в том числе, аналог первого подхода к решению задачи на подвижную нагрузку, с привлечением набора собственных форм конструкции. В [17] решение задачи “груз–балка” или “груз–плита”, путем введения линейного элемента между движущимся грузом и проезжей частью, сводится к решению системы линейных уравнений с привлечением результатов вычисления форм колебаний конструкции, используя при этом метод Ньюмарка. Другой подход, с привлечением LS-DYNA, реализуемый в [18], сводится к изучению действия сложной подвижной инерционной нагрузки на конструкции при применении метода динамической релаксации (DYNAMIC RELAXATION). Заметим, что метод “узловых ускорений”, предлагаемый для пластин, реализуется и в случае движения инерционной нагрузки в [14] при конечноэлементной дискретизации коробчатой конструкции пролетного строения моста.
1. Числовая процедура, используемая для решения задачи. Применяемый метод для решения задачи о действии подвижной нагрузки на пластину использует шаговую процедуру [10]. Рассмотрим предварительно решение задачи для осциллятора. Рассмотрим шаговую процедуру для решения уравнения (1.1)
(1.1)
$\begin{gathered} \ddot {x} + \mu {{\omega }^{2}}\dot {x} + {{\omega }^{2}}x = \tilde {P}(t);\quad {{\omega }^{2}} = c{\text{/}}m,\quad \tilde {P}(t) = r(t){\text{/}}m \\ {{x}_{0}} = x(0),\quad {{{v}}_{0}} = \dot {x}(0) \\ \end{gathered} $Проведем временную дискретизацию с шагом, где $\Delta {{t}_{j}} = {{t}_{{j + 1}}} - {{t}_{j}}$, ($j = 0,1,2, \ldots $)
Преобразуем первое уравнение (1.2), используя замену
(1.3)
${{\ddot {x}}_{{j + 1}}} = 2{{\ddot {x}}_{{j + 1/2}}} - {{\ddot {x}}_{j}},\quad {{\tilde {P}}_{{j + 1}}} = 2{{\tilde {P}}_{{j + 1/2}}} - {{\tilde {P}}_{j}}$(1.4)
$\begin{gathered} {{{\ddot {x}}}_{{j + 1/2}}} = {{{\tilde {\tilde {a}}}}_{j}}\left( { - {{\omega }^{2}}{{x}_{j}} - {{\omega }^{2}}((\Delta {{t}_{j}}{\text{/}}{{\alpha }_{1}}) + \mu ){{{\dot {x}}}_{j}} + {{{\tilde {P}}}_{{j + 1/2}}}} \right) \\ {{{\dot {x}}}_{{j + 1}}} = {{{\dot {x}}}_{j}} + {{{\ddot {x}}}_{{j + 1/2}}}\Delta {{t}_{j}},\quad {{x}_{{j + 1}}} = {{x}_{j}} + {{{\dot {x}}}_{j}}\Delta {{t}_{j}} + {{{\ddot {x}}}_{{j + 1/2}}}\Delta t_{j}^{2}{\text{/}}2, \\ \end{gathered} $Схема (1.4), при обозначении $\beta = - {{\omega }^{2}}{{\tilde {\tilde {a}}}_{j}}$, имеет вид
(1.5)
$\begin{gathered} \left[ \begin{gathered} {{{\ddot {x}}}_{{j + 1/2}}} \hfill \\ {{{\dot {x}}}_{{j + 1}}} \hfill \\ {{x}_{{j + 1}}} \hfill \\ \end{gathered} \right] = {\mathbf{A}}\left[ \begin{gathered} {{{\ddot {x}}}_{{j - 1/2}}} \hfill \\ {{{\dot {x}}}_{j}} \hfill \\ {{x}_{j}} \hfill \\ \end{gathered} \right] + {\mathbf{L}}{{{{\mathbf{\tilde {P}}}}}_{{j + 1/2}}} \\ {\mathbf{A}} = \left[ {\begin{array}{*{20}{c}} 0&{\beta (\mu + \Delta {{t}_{j}}){\text{/}}2}&\beta \\ 0&{1 + \beta \Delta {{t}_{j}}(\mu + \Delta {{t}_{j}}{\text{/}}2)}&{\beta \Delta {{t}_{j}}} \\ 0&{\beta \Delta t_{j}^{2}(\mu + \Delta t{\text{/}}2){\text{/}}2 + \Delta {{t}_{j}}}&{1 + \beta \Delta t_{j}^{2}{\text{/}}2} \end{array}} \right] \\ \end{gathered} $Для безусловно-устойчивой процедуры требуется выполнение условия ρ(A) = $\max \left| {{{\lambda }_{i}}} \right| \leqslant 1$, $i = 1,2,3$, при любом $\Delta {{t}_{j}}$, где $\rho $ – спектральный радиус оператора аппроксимации ${\mathbf{A}}$ и ${{\lambda }_{i}}$ – корни характеристического уравнения $\left\| {{\mathbf{A}} - \lambda {\mathbf{E}}} \right\| = 0$ [19]. Для процедуры (1.4), раскрывая определитель по первой строке и делая замену $Z = 1 - \lambda + \beta \Delta {{t}^{2}}{\text{/}}2$, имеем уравнение $ - \lambda \left[ {{{Z}^{2}} - \mu \Delta {{t}^{2}}{{\omega }^{2}}{{{\tilde {\tilde {a}}}}_{j}}Z + \Delta {{t}^{2}}{{\omega }^{2}}{{{\tilde {\tilde {a}}}}_{j}}^{2}} \right]$ = 0. Решая квадратное уравнение относительно переменной $Z$, определяем ${{\lambda }_{{1,2}}}$ и $\left| {{{\lambda }_{{1,2}}}} \right|$
(1.6)
${{\lambda }_{{1,2}}} = \frac{{1 - \tfrac{1}{4}\Delta t_{j}^{2}{{\omega }^{2}} \mp \Delta {{t}_{j}}\omega \sqrt {\frac{1}{4}{{\mu }^{2}}{{\omega }^{2}} - 1} }}{{1 + \frac{1}{4}\Delta t_{j}^{2}{{\omega }^{2}} + \frac{1}{2}\mu {{\omega }^{2}}\Delta {{t}_{j}}}},\quad \left| {{{\lambda }_{{1,2}}}} \right| = {{\left[ {\frac{{1 + \frac{1}{4}\Delta t_{j}^{2}{{\omega }^{2}} - \frac{1}{2}\mu \Delta {{t}_{j}}{{\omega }^{2}}}}{{1 + \frac{1}{4}\Delta t_{j}^{2}{{\omega }^{2}} + \frac{1}{2}\mu {{\omega }^{2}}\Delta {{t}_{j}}}}} \right]}^{{1/2}}} < 1$Для проверки условия $\max \left| {{{\lambda }_{i}}} \right| \leqslant 1$ рассматривается выполнение при $h = (\mu \omega {\text{/}}2) > 1$ и $h = (\mu \omega {\text{/}}2) < 1$, когда корни ${{\lambda }_{{1,2}}}$ действительные и, соответственно, комплексные. Из простейшей оценки неравенств, следует, что $\rho ({\mathbf{A}}) < 1$ при $\mu \ne 0$ и $\rho ({\mathbf{A}}) = 1$ при $\mu = 0$ для любых значений $\Delta {{t}_{j}}$. Отметим, что если положить в (1.4) $\mu = 0$, ${{\dot {x}}_{j}} = {{x}_{j}} = 0$ и $\tilde {P}(t) = P = \operatorname{const} $, то при $\Delta {{t}_{j}} \to \infty $, ${{\ddot {x}}_{{j + 1/2}}} \to 0$, ${{\dot {x}}_{{j + 1}}} \to 0$, ${{x}_{{j + 1}}} = 2{{x}_{C}}$, где ${{x}_{C}}$ – статический прогиб осциллятора под действием силы $P$.
Применяемая процедура (1.4) совпадает с методом постоянного среднего ускорения, но с измененным начальным ускорением. Метод Ньюмарка [20], при $\delta $ = 0.5, $\beta $ = = 0.25, совпадает с предложенным С.П. Тимошенко в [21] методом постоянного среднего ускорения. Процедура (1.4) имеет характеристики погрешности интегрирования такие же, как у метода Ньюмарка, при $\delta $ = 0.5, $\beta $ = 0.25, при этом, она приводит только к минимальному увеличению периода численного решения без снижения амплитуды [19].
Процедура (1.4), сохраняя указанные характеристики, находит применение к решению методом прямого интегрирования систем уравнений
где ${\mathbf{M}}$, ${\mathbf{C}}$ и ${\mathbf{K}}$ – матрицы масс, демпфирования и жесткости, соответственно; ${\mathbf{R}}$ – вектор внешних узловых нагрузок; ${\mathbf{\ddot {U}}}$, ${\mathbf{\dot {U}}}$, ${\mathbf{U}}$ – векторы узловых ускорений, скоростей и перемещений узловых точек транспортной системы или узловых смещений ансамбля конечных элементов. Для решения (1.7) имеем процедуру(1.8)
${{{\mathbf{\dot {U}}}}_{{j + 1}}} = {{{\mathbf{\dot {U}}}}_{j}} + {{{\mathbf{\ddot {U}}}}_{{j + 1/2}}}\Delta {{t}_{j}}$2. Общие формулы и тестовые примеры. Обратимся с начала к решению классической задачи о движении груза по пластине с переменной скоростью, а затем перейдем к случаю более сложной нагрузки. Используем, далее, безусловно-устойчивую шаговую процедуру по времени (1.8) и метод учета действия безмассовой и инерционной подвижной нагрузки, применяемый для расчета стержневых систем, и предложенных ранее в [10, 11]. Будем рассматривать случаи равнопеременного движения подвижной нагрузки по конструкциям.
Дифференциальное уравнение колебаний прямоугольной пластины при движении по ней груза весом $P$ и массой $M$ имеет вид
(2.1)
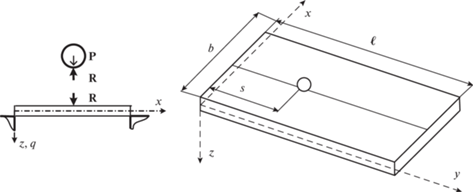
$\begin{gathered} {{L}_{1}}q{\kern 1pt} *{\kern 1pt} \left( {x,y,t} \right) = \delta \left( {x - 0.5b} \right)\delta \left( {y - s(t)} \right) \times {{R}_{{o1}}}(s(t),t) \\ {{L}_{1}} = D\Delta \Delta + m\frac{{{{\partial }^{2}}}}{{\partial {{t}^{2}}}} + {{{\tilde {\mu }}}_{1}}\frac{\partial }{{\partial t}} + k{\kern 1pt} * \\ \end{gathered} $Здесь $D$ – цилиндрическая жесткость; $\Delta = \frac{{{{\partial }^{2}}}}{{\partial {{x}^{2}}}} + \frac{{{{\partial }^{2}}}}{{\partial {{y}^{2}}}}$, ${{\tilde {\mu }}_{1}}$ – коэффициент, учитывающий диссипацию энергии, $q{\kern 1pt} *{\kern 1pt} \left( {x,y,t} \right)$ – прогиб пластины, $R_{{o1}}^{{}}(s(t),t)$ – давление груза на пластину, $x$ и $y$ – координаты по ширине и длине пластины (рис. 1), $\delta \left( {y - s(t)} \right)$ – дельта-функция, $s(t) = {{s}_{0}} + {{{v}}_{0}}t + w{{t}^{2}}{\text{/}}2$ – закон движения груза по пластине, ${{s}_{0}}$ и ${{{v}}_{0}}$ – начальное положение и скорость груза при приземлении на плиту, ${v} = {{{v}}_{0}} + wt$ и $w$ – скорость и ускорение движения груза, $m$ – погонная масса пластины, $b$ и $\ell $ – ширина и длина пластины, $k{\kern 1pt} *$ – коэффициент постели.
Прогиб свободно опертой пластины на упругом основании в момент ${{t}_{{j + 1}}}$ при движении по ней сосредоточенной силы ${{R}_{{}}} = \delta \left( {x - 0.5b} \right)\delta \left( {y - s(t)} \right)$ × ${{R}_{{o1}}}$, используя шаговую процедуру (1.4), предложенную в [10], можно записать в виде
(2.2)
$ \times \;\left\{ {\left( {1 - {{\vartheta }_{{kij}}}\tilde {\omega }_{{ki}}^{2}} \right)q_{{kij}}^{{}} + \left( {\Delta {{t}_{j}} - {{\vartheta }_{{kij}}}\left( {2{{n}_{{ki}}} + \frac{{\Delta {{t}_{j}}}}{2}\tilde {\omega }_{{ki}}^{2}} \right)} \right)\dot {q}_{{kij}}^{{}} + {{\vartheta }_{{kij}}}\int\limits_0^1 {\int\limits_0^1 {\overline \eta {{R}_{{j + 1/2}}}d{{\eta }_{1}}d{{\eta }_{2}}} } } \right\}$Здесь $q_{{kij}}^{{}}$ – обобщенные координаты пластины, ${{\tilde {\omega }}_{{ik}}}$ – круговая частота колебаний, $\sigma $ – коэффициент Пуассона, $h$ – толщина пластины, $E$ – модуль упругости.
Полагая ${{\ddot {q}}_{{1j + 1/2}}} = {{d}^{2}}q{\kern 1pt} *{\kern 1pt} \left( {s(t),t} \right){\text{/}}d{{t}^{2}}$, при $t = {{t}_{{j + 1/2}}}$, запишем полное вертикальное ускорение точки контакта груза [1] при постоянной координате его движения ${{x}_{c}} = \operatorname{const} $ (рис. 1) в виде
(2.3)
${{\ddot {q}}_{{1j + 1/2}}} = {{\left. {\frac{{{{d}^{2}}q{\kern 1pt} *{\kern 1pt} (x,s(t),t)}}{{d{{t}^{2}}}}} \right|}_{{\begin{array}{*{20}{c}} {x = \operatorname{const} } \\ {t = {{t}_{{j + 1/2}}}} \end{array}}}} = {{\left. {\frac{{{{\partial }^{2}}q{\kern 1pt} *}}{{\partial {{t}^{2}}}} + 2\frac{{{{\partial }^{2}}q{\kern 1pt} *}}{{\partial s\partial t}}\frac{{ds}}{{dt}} + \frac{{{{\partial }^{2}}q{\kern 1pt} *}}{{\partial {{s}^{2}}}}{{{\left( {\frac{{ds}}{{dt}}} \right)}}^{2}} + \frac{{\partial q{\kern 1pt} *}}{{\partial s}}\frac{{{{d}^{2}}s}}{{d{{t}^{2}}}}} \right|}_{{t = {{t}_{{j + 1/2}}}}}}$Используя (2.2) и (2.3), имеем на шаге [tj, tj + 1]
(2.4)
${{\ddot {q}}_{{1j + 1/2}}} = \sum\limits_{k = 1}^{{{n}_{1}}} {\sum\limits_{i = 1}^{{{n}_{2}}} {\sin \left( {{{r}_{k}}\frac{{{{x}_{c}}}}{b}} \right)\left\{ {\alpha {}_{{1ij}}\ddot {q}_{{kij + 1/2}}^{{}} + \alpha {}_{{2ij}}\dot {q}_{{kij}}^{{}} + \alpha {}_{{3ij}}q_{{kij}}^{{}}} \right\}} } = {{\tilde {D}}_{1}}(P - M{{\ddot {q}}_{2}}) + {{\tilde {D}}_{o}}$(2.5)
${{\tilde {d}}_{{ij}}} = - \left( {{v}_{0}^{2} + 2w{{t}_{{j + 1/2}}}{v}_{0}^{{}} + {{w}^{2}}t_{{j + 1/2}}^{2}} \right){{\left( {\frac{{{{r}_{i}}}}{\ell }} \right)}^{2}}\sin \left( {{{r}_{i}}{{\eta }_{{2j + 1/2}}}} \right) + w\left( {\frac{{{{r}_{i}}}}{\ell }} \right)\cos \left( {{{r}_{i}}{{\eta }_{{2j + 1/2}}}} \right)$Здесь ${{D}_{1}}$ и ${{D}_{O}}$ – функции, сгруппированные и выделенные из (2.4).
Обозначим через $\varepsilon ({{R}_{{}}}) = \tilde {\alpha }{{R}^{{2/3}}}$ контактное сближение груза и пластины. Уравнение динамического равновесия груза в момент контакта ${{t}_{{j + 1/2}}}$ имеют вид
где ${{q}_{1}}$ – смещение точки контакта груза на пластине, $q_{2}^{{}}$ – вертикальное смещение центра масс груза.Представим выражение контактной силы на шаге $[{{t}_{j}},{{t}_{{j + 1}}}]$ в виде
(2.8)
${{R}_{{j + 1/2}}} = {{k}_{1}}\varepsilon _{{j + 1/2}}^{{3/2}};\quad {{k}_{1}} = {{\tilde {\alpha }}^{{ - 3/2}}},\quad {{\varepsilon }_{{j + 1/2}}} = {{q}_{{2j + 1/2}}} - {{q}_{{1j + 1/2}}}$Для линеаризации полученного уравнения, учитывая (2.8), используем выражение, для приращения, например, функции $f(x,y)$ двух переменных в точке ${{x}_{o}}$, ${{y}_{o}}$ в форме
Преобразуем выражение (2.6) к виду
(2.9)
$M{{\ddot {q}}_{{2j + 1/2}}} + {{k}_{1}}{{\left( {{{q}_{{2j + 1/2}}} - {{q}_{{1j + 1/2}}}} \right)}^{{3/2}}} - {{k}_{1}}{{\left( {{{q}_{{2j}}} - {{q}_{{1j}}}} \right)}^{{3/2}}} = - {{k}_{1}}{{\left( {{{q}_{{2j}}} - {{q}_{{1j}}}} \right)}^{{3/2}}} + {{P}_{{j + 1/2}}}$В итоге, имеем на шаге [tj, tj + 1]
(2.10)
$M{{\ddot {q}}_{{2j + 1/2}}} + \tilde {k}\left( {{{q}_{{2j + 1/2}}} - {{q}_{{1j + 1/2}}}} \right) = {{L}_{{j + 1/2}}},$Объединяя в систему (2.10) и (2.4) на шаге [tj, tj + 1], имеем
Здесь ${\mathbf{\bar {q}}} = [{{q}_{1}},{{q}_{2}}]{\kern 1pt} '$, ${\mathbf{A}} = [{{a}_{{ik}}}]$, ${\mathbf{B}} = [{{b}_{i}}]$, $i,k = 1,2$, $j = 0,1,2,3, \ldots $
На шаге [tj, tj + 1] выражение ${{{\mathbf{\ddot {\bar {q}}}}}_{{j + 1/2}}}$ из (2.11), используя (2.6) и (2.2), позволяет вычислять начальные условия для следующего шага интегрирования, используя, на каждом шаге, условия совместности деформаций в точке контакта груза и пластины.
На первом этапе проведем тестирование алгоритма для учета нелинейной упругости при сближении груза и пластины при ударе, будем для тестирования использовать пример, представленный в [5]. Рассмотрим удар при падении с высоты ${{h}_{0}}$ = 0.26 м груза весом $P$ = 14.7 × 9.8 Н в центр квадратной, стальной, свободно опертой пластины при $b$ = 0.6 м, $h$ = 0.012 м. Процедура (2.3)–(2.11) реализовывалась, полагая при $t$ = 0, $s = {{s}_{0}} = 0.3$ м, ${{{v}}_{0}} = w$ = 0 и ${{q}_{1}}$ = ${{\dot {q}}_{1}} = {{q}_{2}} = 0$, ${{\dot {q}}_{2}} = \sqrt {2g{{h}_{0}}} $. Коэффициент ${{k}_{1}}$ определялся по формуле (для случая одинакового материала у соударяющихся тел) ${{k}_{1}} = 2E\sqrt r {\text{/}}(3(1$ – – σ2)) [5], где $r$ = 0.07141 м. На рис. 2а представлены изменения контактной силы $R$ [кН] и смещение пластины под грузом ${{q}_{1}} = Y \times {{10}^{{ - 4}}}$ [м] в зависимости от времени $t = N \times \Delta {{t}_{j}}$, где $N$ – число шагов при интегрировании системы (2.11), при $\Delta {{t}_{j}} = 0.1057 \times {{10}^{{ - 4}}}$ с. Следует отметить, что результаты, представленные на рис. 2а, практически совпадают с результатами из ([5], с. 715, рис. 19.13). Вторая тестовая задача связана с равнопеременным движением груза по свободно опертой по контору пластине с параметрами [6]
(2.12)
$\beta = \frac{{M{{\mu }_{1}}}}{{\rho h{{\ell }^{2}}}},\quad \alpha = \frac{{{{{v}}_{c}}l}}{{\pi (1 + \mu _{1}^{2})\sqrt {D{\text{/}}m} }},\quad w = \frac{{{v}_{0}^{2}}}{{2\ell }}\left( {{{{\left( {\frac{{{{{v}}_{1}}}}{{{{{v}}_{0}}}}} \right)}}^{2}} - 1} \right),$
3. Метод решения уравнений для системы “самолет–посадочная полоса”. Алгоритм (2.3)–(2.11) легко реализуется в случае движения системы грузов по плите. Выражения вида (2.5) при движении $N$ грузов формируют систему $N$ линейных, алгебраических уравнений
(3.1)
${\mathbf{A}}{{{\mathbf{R}}}_{{ok\;j + 1/2}}} + {\mathbf{E}}{{{\mathbf{\ddot {q}}}}_{{K\;j + 1/2}}} = {\mathbf{B}}$Здесь ${\mathbf{A}}$, ${\mathbf{B}}$ – матрица и вектор (порядок равен числу грузов), ${\mathbf{E}}$ – единичная матрица, ${{{\mathbf{R}}}_{{ok}}} = \left[ {{{R}_{{Oi}}}} \right]$ ($i = 1, \ldots N)$ – вектор динамических давлениям грузов на плиту, ${{{\mathbf{\ddot {q}}}}_{K}}$ – вектор вертикальных ускорений точек контактов движущихся грузов.
Рассмотрим механическую систему в виде пластины на упругом основании, свободно опертой по контуру, и самолета в момент пробега (заключительного этапа посадки самолета). Движение самолета на пробеге считается равнозамедленным с некоторым средним ускорением –$w$. На этапе пробега самолет кроме непрерывно уменьшающихся аэродинамических сил Y и F (рис. 3), т.е. подъемной силы – Y и силы лобового сопротивления – F, включающей составляющую от тормозных парашютов, действует сила трения колес об аэродромное покрытие ${{F}_{{Tp}}}$ = $\sum\nolimits_{i = 1}^3 {{{F}_{{i,Tp}}}} $ = $\sum\nolimits_{i = 1}^3 {f \times {{R}_{{i,}}}} $. Уравнение движения самолета при пробеге можно записать в виде [22, 23] $(G{\text{/}}g)w = F + {{F}_{m}}$, где $G$ – вес самолета при посадке; $f$ – коэффициент трения. При математическом моделировании посадки следует учесть этапы посадки, предшествующие пробегу, т.е. этап выдерживания, при котором Y = G (снижение происходит до высоты 0.25–0.3 м) и этап парашютирования, малый по времени, при Y < G [22, 23], путем ввода подвижной системы координат, в которой рассматриваются вертикальные смещения самолета в момент пробега.
Рис. 3.
Система $\left\{ {{{e}_{h}}} \right\}$, моделирующая самолет и схема сил действующих на него при пробеге.
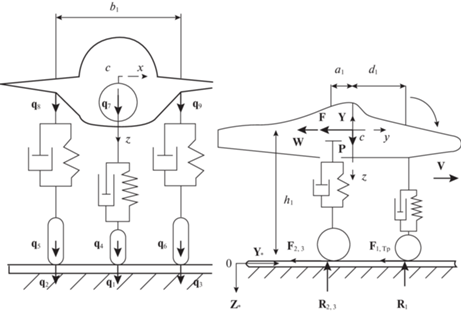
Будем далее обозначать модель самолета через $\left\{ {{{e}_{h}}} \right\}$ $h = 1, \ldots ,4$, представляя ее, как систему жестких тел ${{e}_{h}}$, состоящую из корпуса и трех связанных с ним линейными упруго-вязкими связями колес шасси, имеющих нелинейные связи с пластиной (рис. 3). Будем считать, что начальные условия у $\left\{ {{{e}_{h}}} \right\}$ нулевые, а параметры, определяющие положение $\left\{ {{{e}_{h}}} \right\}$ в системе ${{O}_{*}}{{X}_{*}}{{Y}_{*}}{{Z}_{*}}$, движущейся вдоль плиты поступательно, со скоростью ${v}$, имеют нулевые значения до момента касания колес самолета плиты, при этом в момент контакта $\left\{ {{{e}_{h}}} \right\}$ с плитой считается, что подъемная сила $Y = 0$ (рис. 3). Положение в пространстве корпуса подвижной нагрузки на этапе пробега $\left\{ {{{e}_{h}}} \right\}$ определяется параметрами: ${{q}_{C}}$ – вертикальным смещением центра масс корпуса и малыми поворотами ${{\varphi }_{x}}$ и ${{\varphi }_{y}}$ относительно горизонтальных осей $ox$ и $oy$ (рис. 3). В качестве обобщенных координат ${{q}_{i}}$ ($i$ = 1, …, 9) будем рассматривать вертикальные смещения узловых точек, соединяющих элементы $\left\{ {{{e}_{h}}} \right\}$ через связи (рис. 3).
Для составления системы дифференциальных уравнений движения $\left\{ {{{e}_{h}}} \right\}$ применяется метод кинетостатики. Используя метод расчленения для $\left\{ {{{e}_{h}}} \right\}$, имеем
(3.2)
$\begin{gathered} {{m}_{i}}{{{\ddot {q}}}_{{i + 3}}} = {{R}_{i}} - {{T}_{i}} - \mu {{{\dot {T}}}_{i}} + {{P}_{i}} \\ {{m}_{4}}{{{\ddot {q}}}_{C}} = {{P}_{4}} + \sum\limits_{k = 1}^3 {({{T}_{k}} + \mu {{{\dot {T}}}_{k}})} \\ \end{gathered} $Здесь ${{m}_{i}}$ – массы колес шасси при $i = 1,2,3$ и кузова ${{m}_{4}} = {{M}^{{(куз)}}}$, ${{c}_{{i + 3}}}$ – жесткости линейных связей, моделирующих упругость шасси, $\mu $ – коэффициенты, учитывающие затухания в линейных связях, ${{J}_{x}}$, ${{J}_{y}}$ – моменты инерции относительно осей, проходящих через центр масс кузова, ${{M}^{{(ин)}}}$ = ${{F}_{{Tp}}} \times {{h}_{1}}$ = $({{M}^{{(куз)}}}w - F) \times {{h}_{1}}$ – инерционный момент (рис. 3), ${{a}_{1}}$, ${{b}_{1}}$, ${{c}_{1}}$, ${{d}_{1}}$, ${{h}_{1}}$ – конструктивные размеры $\left\{ {{{e}_{h}}} \right\}$, ${{k}_{i}}$ – коэффициент характеризующий нелинейные связи, в соответствии с (2.8).
После дискретизации по времени системы уравнений (3.2), используя шаговую процедуру (1.8) из [10] и линеаризацию уравнений в соответствии с (2.8)–(2.11), имеем на шаге [tj, tj + 1] систему линейных уравнений
(3.3)
${{{\mathbf{M}}}_{*}}{{{\mathbf{\ddot {\bar {q}}}}}_{{cj + 1}}} + {{{\mathbf{C}}}_{*}}{{{\mathbf{\dot {\bar {q}}}}}_{{cj + 1}}} + {{{\mathbf{K}}}_{*}}{{{\mathbf{\bar {q}}}}_{{cj + 1}}} = {{{\mathbf{P}}}_{1}} + {{{\mathbf{R}}}_{*}};\quad {{{\mathbf{R}}}_{*}} = {{\Pi }_{*}}{{{\mathbf{\vec {R}}}}_{{*j + 1}}}$Здесь ${{{\mathbf{\bar {q}}}}_{c}} = [{{q}_{1}}, \ldots {{q}_{9}}]{\kern 1pt} ' = [\bar {q}_{1}^{o},{{\bar {q}}_{2}}]{\kern 1pt} '$ – вектор независимых обобщенных координат, определяющих $\left\{ {{{e}_{h}}} \right\}$ в системе ${{O}_{*}}{{X}_{*}}{{Y}_{*}}{{Z}_{*}}$ (рис. 3), где ${\mathbf{\bar {q}}}_{1}^{o} = [{{q}_{1}},{{q}_{2}},{{q}_{3}}]{\kern 1pt} '$ – вертикальные смещения точек контакта колес с пластиной на упругом основании, при движении $\left\{ {{{e}_{h}}} \right\}$ в режиме торможения, ${{{\mathbf{M}}}_{*}}$, ${{{\mathbf{C}}}_{*}}$, ${{{\mathbf{K}}}_{*}}$ матрицы масс, демпфирования и жесткости для $\left\{ {{{e}_{h}}} \right\}$, ${{{\mathbf{P}}}_{{\mathbf{1}}}}$ – вектор, учитывающий весовые характеристики, инерционный момент и элементы дискретизации при линеаризации системы (3.1) на шаге [tj, tj + 1], ${{\Pi }_{*}}$ – матрица соединения векторов ${{{\mathbf{\bar {R}}}}_{*}}$ и ${{{\mathbf{R}}}_{*}}$, где ${{{\mathbf{\bar {R}}}}_{*}} = [{{R}_{1}},{{R}_{2}},{{R}_{3}}]{\kern 1pt} '$ – вектор реакций $\left\{ {{{e}_{h}}} \right\}$ в точках контакта с проезжей частью.
Представим систему (3.3), в соответствии с (1.8), на шаге [tj, tj + 1] в виде
(3.4)
${{{\mathbf{\ddot {\bar {q}}}}}_{{c\,j + 1/2}}} = {{{\mathbf{\tilde {G}}}}_{1}}{{{\mathbf{\bar {q}}}}_{{c\,j}}} + {{{\mathbf{\tilde {G}}}}_{2}}{{{\mathbf{\dot {\bar {q}}}}}_{{c\,j}}} + {\mathbf{A}}{\text{*}}\left( {{{{\mathbf{P}}}_{1}} + {{{\mathbf{\Pi }}}_{*}}{{{{\mathbf{\bar {R}}}}}_{{*j + 1/2}}}} \right)$(3.5)
$\begin{gathered} {\mathbf{A}}* = {{\left[ {{{{\mathbf{M}}}_{*}} + {{{\mathbf{C}}}_{*}}\frac{{\Delta {{t}_{j}}}}{2} + {{{\mathbf{K}}}_{*}}\frac{{\Delta t_{j}^{2}}}{4}} \right]}^{{ - 1}}},\quad {{{{\mathbf{\tilde {G}}}}}_{1}} = - {\mathbf{A}}{\text{*}}{{{\mathbf{K}}}_{*}},\quad {{{{\mathbf{\tilde {G}}}}}_{2}} = - {\mathbf{A}}{\text{*}}\left[ {{{{\mathbf{C}}}_{*}} + {{{\mathbf{K}}}_{*}}\frac{{\Delta {{t}_{j}}}}{2}} \right] \\ {{{{\mathbf{\bar {q}}}}}_{{c\,j + 1}}} = {{{{\mathbf{\bar {q}}}}}_{{c\,j}}} + {{{{\mathbf{\dot {\bar {q}}}}}}_{{c\,j}}}\Delta {{t}_{j}} + {{{{\mathbf{\ddot {\bar {q}}}}}}_{{c\,j + 1/2}}}\frac{{\Delta t_{j}^{2}}}{2},\quad {{{{\mathbf{\dot {\bar {q}}}}}}_{{c\,j + 1}}} = {{{{\mathbf{\dot {\bar {q}}}}}}_{{c\,j}}} + {{{{\mathbf{\ddot {\bar {q}}}}}}_{{c\,j + 1/2}}}\Delta {{t}_{j}} \\ \end{gathered} $Будем считать, что посадка $\left\{ {{{e}_{h}}} \right\}$, при решении задачи происходит на три колеса одновременно (аварийный, но один из возможных вариантов), хотя методика, имея в основе шаговую процедуру, не накладывает ограничений на вид посадки, при этом торможение $\left\{ {{{e}_{h}}} \right\}$ происходит при усредненном постоянном значении сил F и Y = 0 (рис. 3). При движении $\left\{ {{{e}_{h}}} \right\}$ по пластине требуем выполнение условий неразрывности перемещений и скоростей ${{{\mathbf{\bar {q}}}}_{{ok}}} = {\mathbf{\bar {q}}}_{1}^{^\circ }$, ${\mathbf{\dot {\bar {q}}}}_{K}^{{}} = {\mathbf{\dot {\bar {q}}}}_{1}^{^\circ }$ и условий равновесия в движущихся узлах (в точках контакта колес с пластиной)
Выделим из (3.4) подсистему уравнений, отвечающих в левой части подвектору ${\mathbf{\ddot {\bar {q}}}}_{{1j + 1/2}}^{o}$, и выразим далее эту подсистему относительно вектора динамических давлений, представив ее в виде
(3.7)
${{{\mathbf{\bar {R}}}}_{{*j + 1/2}}} = {{{\mathbf{W}}}^{o}}{\mathbf{\ddot {\bar {q}}}}_{{1\,j + 1/2}}^{o} + {{{\mathbf{L}}}^{o}}$Подставим в (3.6) векторы ${{{\mathbf{\bar {R}}}}_{{ok}}}$ и ${{{\mathbf{\bar {R}}}}_{*}}$, соответственно, из (3.1) и (3.7), в итоге имеем разрешающую систему уравнений на шаге [tj, tj + 1]
(3.8)
$\begin{gathered} {\mathbf{D}}{{{{\mathbf{\ddot {\bar {q}}}}}}_{{K\,j + 1/2}}} = {{{\mathbf{D}}}^{o}} \\ {\mathbf{D}} = {{{\mathbf{A}}}^{{ - 1}}} - {{{\mathbf{W}}}^{o}},\quad {{{\mathbf{D}}}^{o}} = {{{\mathbf{A}}}^{{ - 1}}}{\mathbf{B}} + {{{\mathbf{L}}}^{o}}, \\ \end{gathered} $Проследим ход решения всей задачи при j = 0, 1, 2, … На шаге [tj, tj + 1] при начальных условиях задачи в момент tj определяется, применяя (3.8), вектор ${{{\mathbf{\ddot {\bar {q}}}}}_{{K\,j + 1/2}}}$, далее, используя (3.4), (3.5) и (2.2), вычисляются поля смещений, давлений, скоростей и ускорений для системы $\left\{ {{{e}_{h}}} \right\}$ в момент tj + 1. Далее процесс повторяется.
4. Результаты численного моделирования. Шаговая процедура (3.8) реализована для $\left\{ {{{e}_{h}}} \right\}$ и пластины с параметрами $\ell $ = 130 м, $b$ = 40 м, Е1 = 0.23 × 108 кН/м2, h = 0.18 м, m = 0.36 т/м2, $\sigma $1 = 0.18, $k* = 120 \times {{10}^{3}}$ кН/м3, $n_{1}^{{}}$ = 240 и $n_{2}^{{}}$ = 640. Для системы $\left\{ {{{e}_{h}}} \right\}$ (рис. 3) условно выбраны параметры: ${{b}_{1}}$ = 3 м, ${{a}_{1}} + {{d}_{1}}$ = 7 м, $h{}_{1}$ = 2.5 м, ${{J}_{x}}$ = 397 т м2, ${{J}_{y}}$ = 53.5 т м2, ${{m}_{1}}$ = 0.15 т, ${{m}_{2}}$ = ${{m}_{3}}$ = 0.25 т, ${{m}_{4}}$ = 22.0 т, ${{c}_{i}}$ = 800 кН/м, $\mu $ = 6 кНс/м, ${{P}_{1}}$ = 63.6 кН, ${{P}_{2}} = {{P}_{3}}$ = 71.65 кН, $\tilde {\alpha } = {{[9{{({{\vartheta }_{1}} + {{\vartheta }_{2}})}^{2}}{\text{/}}256r]}^{{1/3}}}$, где ${{\vartheta }_{i}} = 4(1 - \sigma _{i}^{2}){\text{/}}{{E}_{i}}$ $(i = 1,2)$, ${{E}_{2}}$ = 8.83 × × 103 кН/м2, ${{\sigma }_{2}}$ = 0.42, $r$ = 0.5 м [6, 22, 23].
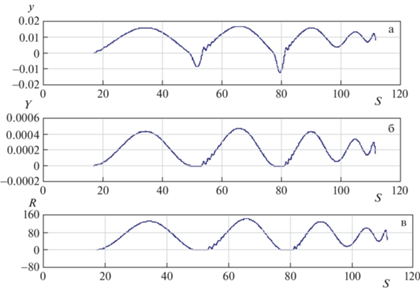
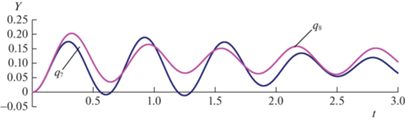
Посадка самолета происходит со скоростью ${{{v}}_{o}}$ = 63 м/с, а торможение с ускорением $w$ = –21 м/с2, при этом время движения ${{t}_{{{дв}}}}$ = 3 с, с использованием тормозных парашютов. Интегрирование системы дифференциальных уравнений (3.8) происходит при $\Delta {{t}_{j}} = 0.00025$ с и числе шагов $N$ = 12 000. При посадке $\left\{ {{{e}_{h}}} \right\}$ считается, что касание носового колеса пластины происходит при нулевой вертикальной скорости на расстоянии $s{}_{o}$ = 17 м от края пластины, при ${{x}_{c}}$ = 20 м (рис. 2). Тормозной путь системы $\left\{ {{{e}_{h}}} \right\}$ до остановки составляет 94.5 м. На рис. 4(а, б, в), в режиме торможения $\left\{ {{{e}_{h}}} \right\}$, представлены в зависимости от s[м] = ${{s}_{0}} + {{{v}}_{0}}t + w{{t}^{2}}{\text{/}}2$, при тестовом соответствии между графиками: 1) вертикальное смещение у $\left\{ {{{e}_{h}}} \right\}$ носового (первого) колеса $Y = {{q}_{4}}$ [м] (рис. 4, а), при движении его с отскоком в зоне $s$ = 50–52 м; 2) вертикальное смещение плиты $Y = {{q}_{1}}$ [м] (рис. 4, б) под первым колесом; 3) динамическое давление $\left\{ {{{e}_{h}}} \right\}$ на плиту под первым колесом $R = {{R}_{1}}$ [кН] (рис. 4, в). Отметим, что при реализации шаговой процедуры $R = {{R}_{1}}$ = 0 в момент отскоков колеса. На рис. 5 представлены, в зависимости от времени t [с] вертикальные смещения узлов корпуса самолета $Y({\text{м)}} = {{q}_{7}}$ и $Y({\text{м)}} = {{q}_{8}}$ (рис. 3) при его движении с торможением по пластине на упругом основании. Следует отметить, что изменения динамических давлений ${{R}_{1}}$ и ${{R}_{2}}$ происходят, соответственно, относительно значений статических давлений ${{P}_{1}}$ и ${{P}_{2}}$ колес на пластину.
Рис. 4.
Перемещения и динамические реакции у колес шасси системы $\left\{ {{{e}_{h}}} \right\}$ в момент торможения при посадке.
Остановимся еще на одном этапе исследования колебаний пластин при пробеге летательного аппарата по аэродромной полосе. К этому этапу относятся задачи, связанные с распространением волн деформаций в аэродромном покрытии. При решении волновых задач для протяженных пластин и стержней на упругом основании используются как интегральные преобразования при движении силовой нагрузки [1, 4], так и, для конструкций конечных размеров, наборы собственных форм сооружения. Применение численных методов позволяет, при этом, отслеживать процесс движения, в частности, сдвиговых волн от внезапной нагрузки, например, для балки Тимошенко на дискретных упруго-инерционных опорах в [24]. В пластинах и стержнях на упругом основании с учетом затуханий распространяются волны с сильной дисперсией [25]. Отметим, что высокоскоростные режимы движения могут вызывать дополнительные эффекты, что требует определенных оценок. Используем комбинированный подход. Для оценки появления резонансных решений приведем решение задачи о движении сосредоточенной силы $P$ по пластине на упругом основании, в виде бесконечной полосы свободно опертой по краям. Решение уравнения (2.1) при правой части $P\delta (x - {{x}_{c}})\delta (\zeta )$ и ${{\tilde {\mu }}_{1}}$ = 0 ищется в виде $q{\kern 1pt} *{\kern 1pt} (x,\zeta )$ = $\sum\nolimits_{n = 1,}^\infty {{{f}_{n}}(\zeta )} \sin \left( {{{\omega }_{n}}x} \right)$, ($\zeta = y - {v}t$, ${{\omega }_{n}} = \pi n{\text{/}}b$, ${{x}_{c}} = b{\text{/}}2$). Прогиб $q{\kern 1pt} *{\kern 1pt} (x,y - {v}t)$ части бегущей волны у пластины перед силой, при $\zeta = y - {v}t \geqslant 0$, имеет вид
(4.1)
$q{\kern 1pt} *{\kern 1pt} (x,\zeta ) = \sum\limits_{n = 1}^\infty {\frac{{{{e}^{{ - \alpha \zeta }}}P\sin {{\omega }_{n}}x\sin {{\omega }_{n}}{{x}_{c}}}}{{2Db\beta \alpha ({{\alpha }^{2}} + {{\beta }^{2}})}}(\alpha \sin \beta \zeta + \beta \cos \beta \zeta )} ,$В знаменателе (4.1), при $x = {{x}_{c}}$ и $\zeta $ = 0, находится выражение $\tilde {b} - \tilde {a}{{{v}}^{2}}$, определяющее серию критических скоростей движения силы по бесконечной полосе, моделируемой пластиной на упругом винклеровском основании.
В итоге при $n = 1,3,5$
(4.2)
${{{v}}_{{n,KP}}} = \sqrt {\frac{{2D}}{m}\left[ {\sqrt {\omega _{n}^{4} + \frac{{k{\kern 1pt} *}}{D}} + \omega _{n}^{2}} \right]} > 62\;{\text{м/с}}$Отметим, что в соответствии с (4.2) можно оценить диапазон появления критических скоростей при движении нагрузки в зависимости от параметров плиты и основания. В статье, при выбранных параметрах $D$, $m$, $k{\kern 1pt} *$, $b$, посадочная скорость самолета лежит вне зоны появления критических скоростей.
Заключение. Предложенный метод позволяет исследовать, используя шаговую процедуру, предложенную в [10] и метод узловых ускорений из [11], действие подвижной инерционной нагрузки при движении с переменной скоростью, по пластинам при различных граничных условиях, используя соответствующие фундаментальные функции [5]. В задачах автомобильного и авиационного транспорта метод позволяет исследовать поведение системы “инерционная подвижная нагрузка – техническое покрытие, моделируемое плитой на упругом основании” при различных скоростях движения нагрузки и неровностях поверхности, и определять напряженно-деформируемое состояние пластины и динамические давления колес в режимах торможения или разгона $\left\{ {{{e}_{h}}} \right\}$.
Список литературы
Fryba L. Vibration of solids and structures under moving loads. Prague: Academia, 1972. 494 p.
Zheng Lu, Hailin Yao, Yongxiang Zhan, Zhi Hu. Vibrations of a plate on a two-parameter foundation subjected to moving rectangular loads of varying velocities // JVE Int. LTD. J. Vibroengng. 2014. V. 16. Iss. 3. P. 1543–1554.
Ghafoori E., Kargarnovin M.H., Ghahremani A.R. Dynamic responses of a rectangular plate under motion of an oscillator using a semi-analytical method // J. Vibr. & Control. 2011. V. 17. № 9. P. 1310–1324.
Блинов А.Н. Динамическая реакция пластины на действие движущейся нагрузки // Ж. Сиб. фед. унив. Математика и физика. 2009. Т. 2 (1). С. 41–47.
Филиппов А.П. Колебания деформируемых систем. М.: Машиностроение, 1970. 734 с.
Кохманюк С.С., Янютин Е.Г., Романенко Л.Г. Колебания деформируемых систем при импульсных и подвижных нагрузках. Киев: Наук. думка, 1980. 231 с.
Серазутдинов М.И. Колебания пластины под действием равномерно распределенной нагрузки, движущейся с переменной скоростью // Тр. сем. по теории оболочек. Казан. ФТИ АН СССР. 1975. Вып. 6. С. 163–167.
Inglis C.E. A Mathematical Treatise on Vibrations in Railway Bridges, Cambridge: Univ. Press, 1934. 203 p.
Моргаевский А.В. О колебаниях пластины, несущей подвижную нагрузку // Прикл. мех. 1966. Т. 2. Вып. 8. С. 64–74.
Иванченко И.И. Расчеты на подвижные и импульсивные нагрузки стержневых систем с распределенными параметрами // Прикл. мех. 1988. Т. 24. № 9. С. 109–118.
Иванченко И.И. О действии подвижной нагрузки на мосты // Изв. РАН. МТТ. 1997. № 6. С. 180–185.
Иванченко И.И. Метод расчета на подвижную нагрузку стержневых систем, моделирующих мосты // Изв. РАН. МТТ. 2001. № 4. С. 151–165.
Иванченко И.И. Метод расчета стержней под действием инерционной нагрузки с переменной скоростью движения // ПММ. 2019. Т. 83. Вып. 5–6. С. 808–816.
Иванченко И.И. Динамика мостов: высокоскоростные подвижные, аэродинамические и сейсмические нагрузки. М.: Наука, 2021. 527 с.
Museros P., Martinez-Castro A.E., Castillo-Linares A. Semi-analytic solution for Kirchhoff plates traversed by moving loads // Proc. EURODYN 2005, Struct. Dyn., Paris. 2005. V. 3. P. 1619–1625.
Bonin G., Cantisani G., Loprencipe G., Ranzo A. Modeling of dynamic phenomena in road and airport pavements // Conf.: 5th Int. CROW. 2004. 14 p.
Jing Yang, Huajiang Ouyang, Dan Stancioiu. An approach of solving moving load problems by ABAQUS and MATLAB using numerical modes // ICVE2015, Shanghai (China), Sept. 18–20 2015. 8 p.
Klasztorav M., Sziugott P. Modeling and Simulation of Bridge–Track–Train Systems at High Service Velocities with LS-DYNA // 12th Int. LS-DYNA, Users Conf. 2012. 13 p.
Бате К., Вилсон Е. Численные методы анализа и метод конечных элементов. М.: Наука, 1982. 447 с.
Newmark N. A method of computation for structural dynamics // J. Eng. Mech. Div. ASCE. 1959. V. 85. № EM3. P. 67–94.
Timoshenko S. Vibration Problems in Engineering. New York: Van Nostrand Co., 1928. P. 79–81.
Шумилов И.С. Математическое моделирование системы торможения колес шасси магистрального самолета // Машины и установки: проектирование, разработка и эксплуатация. МГТУ им. Н.Э. Баумана. Электрон. ж. 2016. № 01. С. 24–42.
Балакин В.Л., Лазарев Ю.Н. Динамика полета самолета. Расчет траекторий и летных характеристик: электрон. Самара: Самар. гос. аэрокосм. ун-т им. С.П. Королева, 2011. 55 с.
Иванченко И.И. Численное моделирование волновых процессов в балке Тимошенко, лежащей на множестве упруго-вязких, инерционных опор // Волновая динамика машин и конструкций. Вторая Всерос. научн. конф., Нижний Новгород, 28–31 октября 2007 г. Тезисы, 42 с.
Нелинейные волны / Под ред. Лейбовича С., Сибасса А. М.: Мир, 1977. 320 с.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика