

Радиотехника и электроника, 2022, T. 67, № 4, стр. 404-410
Взаимодействие компонентов микросервисной архитектуры на основе RESTful подхода для расчета электронных схем в частотной области
В. Н. Гридин a, *, В. И. Анисимов a, b, С. А. Васильев a, b
a Центр информационных технологий в проектировании РАН
143003 Одинцово, Московской обл., ул. Маршала Бирюзова, 7а, Российская Федерация
b Санкт-Петербургский государственный электротехнический университет “ЛЭТИ” им. В.И. Ульянова (Ленина)
197022 Санкт-Петербург, ул. Профессора Попова, 5, Российская Федерация
* E-mail: info2@ditc.ras.ru
Поступила в редакцию 01.07.2021
После доработки 05.08.2021
Принята к публикации 26.09.2021
- EDN: SJHFZE
- DOI: 10.31857/S0033849422040052
Аннотация
Определены основные требования к программному обеспечению для построения распределенных систем автоматизации схемотехнического проектирования. Описаны отличительные особенности архитектурного стиля построения распределенных систем на основе веб-сервисов RESTful. Описаны методы группировки компонентов моделируемой схемы на основе типа подключаемого полюса. Предложена форма записи уравнения моделируемое схемы с возможность использования как явной, так и неявной формы описания компонентных уравнений. Предложены два способа реализации вычислительного процесса расчета характеристик электронной схемы на основе разных принципов формирования математического описания в комплексной и линейной формах. Приведены преимущества и недостатки описанных методов, а также алгоритмы формирования математического описания.
ВВЕДЕНИЕ
Построение системы автоматизации схемотехнического проектирования предполагает наличие следующих требований к программному обеспечению: масштабируемость, возможность модернизации (добавления функций), работа с большими сложно структурированными объемами данных. На основе приведенных требований становится очевидно, что монолитный подход, лежащий в основе построения веб-служб, к организации серверной составляющей, несущей бизнес-логику системы, не является оптимальным. Наиболее подходящей под описанную задачу является микросервисная архитектура, она в полной мере отвечает основным требованиям за счет разделения системы на автономные модули. Основной особенностью является то, что микросервисы обновляются и развертываются независимо друг от друга, слабая связанность микросервисов позволяет оперативно повысить производительность системы за счет ее вертикального и, что более ценно, горизонтального масштабирования. Также преимуществом микросервисной архитектуры является возможность внедрять нововведения без особого влияния на систему в целом путем присоединения или замены одного, или нескольких из узлов системы. Архитектура микросервисов определяет не только структуру программного обеспечения, но и организацию команды разработчиков, позволяя эффективно распараллелить и контролировать этапы формирования программного комплекса [1, 2].
Для построения микросервисной архитектуры возможно использование архитектурного стиля взаимодействия компонентов распределенного приложения в сети RESTful, который обладает рядом преимуществ по сравнению с альтернативными подходами на основе традиционного протокола обмена структурированными сообщениями в распределенной вычислительной среде SOAP. К указанным преимуществам можно отнести: отсутствие дополнительного внутреннего программного обеспечения, требующего специального преобразования данных для обмена ими, каждый ресурс имеет уникальный URL-адрес, управление ресурсами выпо лняется на основе формирования запросов с помощью методов GET, PUT, POST, DELETE, определяющих набор операций сервера CRUD (Create–Read–Update–Delete).
Системы автоматизации схемотехнического проектирования должны решать следующие основные задачи:
– расчет частотных характеристик электронных схем;
– расчет переходных характеристик электронных схем;
– расчет стационарного режима электронных схем;
– расчет чувствительности выходных параметров электронных схем к вариации параметров компонентов.
Одной из распространенных задач схемотехнического проектирования является расчет электронных схем в частотной области с целью вычисления их частотно-зависимых передаточных функций. Эту задачу необходимо решать при проектировании электронных схем с целью выбора компонентов, обеспечивающих достаточно широкополосную характеристику в области низших и высших частот. Как правило, такая задача выполняется многократно в пределах заданного техническими условиями частотного диапазона.
Возможны два похода к решению задачи моделирования электронных схем в частотной области. Первый предусматривает формирование комплексных матриц моделируемой схемы частотного диапазона с расчетом значения комплексной частоты s = (0.0, 6.28$f[kf]$) для всех выбранных точек массива частот $f[kf]$. Такая процедура должна выполняться для всех компонентов схемы, что связано со значительными затратами времени, что является недостатком указанного подхода. Второй подход к построению алгоритма расчета частотных свойств моделируемой схемы предусматривает предварительное построение вещественных частотно-независимых матриц для описания компонентов схемы, которые должны быть записаны в линейной форме ${\mathbf{W}} = {\mathbf{A}} + s{\mathbf{B}}$, составляющими которой являются вещественные матрицы A и B, не зависящие от частоты. Использование этого подхода к расчету частотных свойств значительно повышает скорость решения задачи расчета частотных свойств электронных устройств, поскольку на всех частотных точках используется одно и то же описание частотных свойств компонентов схемы. Следует, однако, иметь в виду, что при использовании второго подхода к расчету частотных свойств электронных схем необходимо предварительно представить математическое описание их компонентов в линейной форме, что является не всегда тривиальной задачей.
1. ПОСТРОЕНИЕ МИКРОСЕРВИСНОЙ АРХИТЕКТУРЫ НА ОСНОВЕ RESTful ПОДХОДА
Для реализации программного обеспечения автоматизированного схемотехнического проектирования на основе технологии веб-сервисов с применением архитектурного подхода REST требуется определить ряд критериев, которым должна соответствовать система [3, 4].
1. Разделение системы на клиентские и серверные составляющие. Такое разделение двух основополагающих программных продуктов позволяет добиться множественных преимуществ: возможность организации кроссплатформенных клиент-серверных взаимодействий, возможность независимой модернизации составляющих, упрощение масштабируемости и администрирования системы.
2. Работа сервера по модели конечного автомата в отношении данных о клиенте. Сервер не хранит какую-либо информацию о состоянии клиента, при этом клиентское приложение обладает полнотой информации о состоянии сессии и формирует запросы, содержащие всю необходимую информацию для вызова ресурса.
3. Индикация кэша в ответе. Узлы системы или клиентские приложения имеют возможность кэшировать ответы сервера, явно помечая их, тем самым предотвращая использование устаревших или некорректных данных. Такой механизм позволяет увеличить производительность системы, уменьшая количество запросов к серверу за счет кэширования данных.
4. Построение иерархии системы на основе слоев. Компонент системы может видеть узлы непосредственно следующего уровня, что позволяет повысить масштабируемость системы за счет промежуточных серверов.
5. Передача исполняемого кода (опционально). Технология RESTful позволяет реализовать передачу исполняемого кода клиентскому приложению в виде сценариев или апплетов, тем самым повышая функциональность клиентского приложения за счет передаваемой ему логики.
6. Унификация интерфейсов. Единый интерфейс позволяет сервисам, входящим в состав системы, развиваться независимо друг от друга.
Унифицированный интерфейс имеет следующие принципы: ресурсы идентифицируются в запросах посредством уникального идентификатора; представлением ресурса является текущее или желаемое состояние ресурса, позволяющее модифицировать или удалить данные ресурса; запрос и ответ хранят в себе достаточно информации для их обработки; изменения состояния клиентского приложения базируются на основе динамически формирующихся на серверной стороне данных (например, изображение электронной схемы).
Одним из сценариев работы микросервиса является обработка запроса без осуществления подзапросов к другим компонентам, например, обработка алгоритма расчета электронной схемы в частотной области, в таком случае необходимо определить URL сервиса для передачи параметров расчета.
Альтернативным сценарием работы микросервиса является решение задачи посредством ее декомпозиции с учетом ресурсов других компонентов, работающих по любому из перечисленных сценариев. Для демонстрации работы системы необходимо создать еще один сервис, взаимодействующий с первым сервисом с целью передачи клиенту модифицированного сообщения. Также создадим клиентскую составляющую распределенной системы на основе Framework программной платформы “Angular”, использующего язык, являющийся надстройкой над JavaScript – TypeScript, в котором исправлены многие недостатки JavaScript (например, типизация данных). Использование языка TypeScript повышает эффективность разработки, указанный Framework, имеет встроенный компилятор для преобразования его в JavaScript, поэтому конечный результат разработки клиентского приложения будет использовать единый язык программирования с серверными составляющими.
После выполнения команды “ng serve” автоматически откроется браузер с содержимым, приведенным на рис. 1 (верхняя часть). При нажатии на кнопку “Info” клиентское приложение обратится к серверу 2, а тот в свою очередь к серверу 1, при этом полученные результаты сервер 2 модернизирует, преобразуя данные в формат json. Клиентское приложение получит данные от сервера 2, при этом все манипуляции с данными и бизнес-логика внутри распределенного серверного приложения (сервер 1 и сервер 2) останутся конфиденциальными [5, 6].

2. МЕТОДЫ ОРГАНИЗАЦИИ ВЫЧИСЛИТЕЛЬНЫХ ПРОЦЕССОВ ПРИ РАСЧЕТЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Все многополюсные компоненты моделируемой схемы могут быть разбиты на две группы. В первую группу входят компоненты, полюсные уравнения которых могут быть представлены в явной форме $p = f(...,q,...)$ [7–9]. Если зависимая переменная $p$ является токовой переменной, то эта переменная подключена к y-полюсу и ее уравнение имеет вид
Если же переменная $p$ является потенциальной переменной, то эта переменная подключена к z‑полюсу и ее уравнение записывается в виде
Проводя линеаризацию уравнений (1) и (2), можно представить уравнения y- и z-полюсов в виде
(3)
${{i}_{i}} = \sum\limits_k {y_{{ik}}^{0}{{u}_{k}} + \sum\limits_l {\beta _{{il}}^{0}{{i}_{l}} + j_{i}^{0}} } ,$(4)
${{u}_{j}} = \sum\limits_k {\mu _{{jk}}^{0}{{u}_{k}} + \sum\limits_l {z_{{jl}}^{0}{{i}_{l}} + e_{j}^{0}} } .$Линеаризованные неавтономные и автономные параметры многополюсника при этом определяются выражениями
В матричной форме линеаризованные уравнения (1) и (2) y- и z-полюсов имеют вид
(5)
${{{\mathbf{I}}}_{y}} = {\mathbf{Y}}_{{\text{м}}}^{0}{{{\mathbf{U}}}_{y}} + {\mathbf{B}}_{{\text{м}}}^{0}{{{\mathbf{I}}}_{z}} + {\mathbf{J}}_{{\text{м}}}^{0},$(6)
${{{\mathbf{U}}}_{z}} = {\mathbf{M}}_{{\text{м}}}^{0}{{{\mathbf{U}}}_{y}} + {\mathbf{Z}}_{{\text{м}}}^{0}{{{\mathbf{I}}}_{z}} + {\mathbf{E}}_{{\text{м}}}^{0}.$Во вторую группу полюсов входят полюса, для которых полюсные уравнения задаются в неявной форме:
где ${{u}_{d}},{{i}_{d}}$ – потенциальная и токовая переменные полюса, входящего в группу дополнительных полюсов, уравнения которых задаются в неявной форме, uy,iz-потенциальная и токовая переменные y- и z-полюсов.Проводя линеаризацию уравнений полюсов, заданных в неявной форме, получим
(7)
${\mathbf{G}}_{d}^{0}{\mathbf{U}}_{d}^{{}} + {\mathbf{H}}_{d}^{0}{\mathbf{I}}_{d}^{{}} + {\mathbf{G}}_{y}^{0}{{{\mathbf{U}}}_{y}} + {\mathbf{H}}_{z}^{0}{{{\mathbf{I}}}_{z}} + {\mathbf{S}}_{d}^{0} = 0.$Топологические уравнения на основе матрицы инциденций моделируемой схемы можно записать в виде [10–12]
(8)
${{{\mathbf{A}}}_{y}}{{{\mathbf{I}}}_{y}} + {{{\mathbf{A}}}_{z}}{{{\mathbf{I}}}_{z}} + {{{\mathbf{A}}}_{d}}{{{\mathbf{I}}}_{d}} = 0,$После исключения из уравнений (5)–(11) векторов ${{{\mathbf{U}}}_{y}},{{{\mathbf{I}}}_{y}},{{{\mathbf{U}}}_{z}},{{{\mathbf{U}}}_{d}}$, получим матричное уравнение моделируемой схемы в расширенном базисе узловых потенциалов:
(12)
$\begin{gathered} \left( {\begin{array}{*{20}{c}} {{{{\mathbf{A}}}_{y}}{\mathbf{Y}}_{{\text{м}}}^{0}{\mathbf{A}}_{y}^{T}}&{{{{\mathbf{A}}}_{y}}{\mathbf{B}}_{{\text{м}}}^{0}{\mathbf{A}}_{y}^{T} + {{{\mathbf{A}}}_{z}}}&{{{{\mathbf{A}}}_{d}}} \\ {{\mathbf{M}}_{{\text{м}}}^{0}{\mathbf{A}}_{y}^{T} - {\mathbf{A}}_{z}^{T}}&{{\mathbf{Z}}_{{\text{м}}}^{0}}&0 \\ {{\mathbf{G}}_{d}^{0}{\mathbf{A}}_{d}^{T} + {\mathbf{G}}_{y}^{0}{\mathbf{A}}_{y}^{T}}&{{\mathbf{H}}_{z}^{0}}&{{\mathbf{H}}_{d}^{0}} \end{array}} \right) \times \\ \times \,\,\left( {\begin{array}{*{20}{c}} {\mathbf{V}} \\ {{{{\mathbf{I}}}_{z}}} \\ {{{{\mathbf{I}}}_{d}}} \end{array}} \right) + \left( {\begin{array}{*{20}{c}} {{{{\mathbf{A}}}_{y}}{\mathbf{J}}_{{\text{м}}}^{0}} \\ {{\mathbf{E}}_{{\text{м}}}^{0}} \\ {{\mathbf{S}}_{d}^{0}} \end{array}} \right) = 0. \\ \end{gathered} $Отличительной особенностью уравнения (12) является возможность использования как явной, так и неявной формы описания компонентных уравнений моделируемой схемы. При этом вектор базисных переменных ${\mathbf{X}} = {{[{{{\mathbf{V}}}^{T}},{\mathbf{I}}_{z}^{T},{\mathbf{I}}_{d}^{T}]}^{T}}$ уравнения (12) содержит все узловые потенциалы схемы, а также токи z-полюсов компонентов, описываемых уравнениями в явной форме, и токи тех компонентов, для которых уравнения имеют неявную форму.
Вычислительный процесс при расчете характеристик электронных схем в частотной области может быть реализован двумя способами. Первый предусматривает формирование на всех частотных точках математического описания компонентов схемы на основе комплексного типа данных.
Эта задача решается при помощи функций формирования частных матриц описания компонентов, которые создаются в проекте для каждого типа компонента схемы (двухполюсные компоненты типа R, C и L, трансформаторы, биполярные и униполярные транзисторы, операционные усилители, а также произвольные управляемые источники). При этом результирующие матрицы W и S матричного уравнения схемы WX + S = 0 образуются путем суммирования частных матриц, каждая из которых учитывает вклад k-го компонента в общее описание схемы [13–15]:
Реализация этого способа осуществляется согласно блок-схеме, приведенной на рис. 2а.
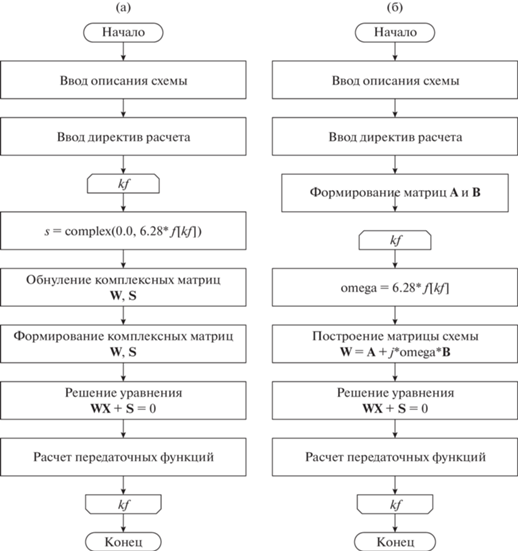
В блок-схеме рис. 2а содержится частотный цикл, в котором при помощи класса complex, обеспечивающего работу с комплексной арифметикой, на каждой частотной точке формируется комплексная переменная s = (0.0, 6.28*$f[kf]$), на основе которой формируется комплексное матричное уравнение схемы WX + S = 0.
На заключительных этапах блок-схемы рис. 2а выполняется решение уравнения моделируемой схемы и расчет ее передаточных функций.
Недостатком такого способа моделирования электронных схем в частотной области является необходимость многократного формирования описания частных матриц всех компонентов схемы, которое должно выполняться на каждой частотной точке.
Альтернативным способом решения задачи расчета электронных схем в частотной области является формирование математического описания схемы на основе представления комплексной матрицы схемы в линейной форме W = A + sB, содержащей частотно-независимые вещественные матрицы A и B, при помощи которых на каждой частоте вычисляется комплексная матрица схемы ${\mathbf{W}} = {\mathbf{A}} + s{\mathbf{B}} = {\mathbf{A}} + j\omega {\mathbf{B}}$.
Блок-схема процесса моделирования схем в частотной области с использованием частотно-независимых вещественных матриц приведена на рис. 2б. В соответствии с приведенной блок-схемой формирование вещественных частотно-независимых матриц A и B моделируемой схемы выполняется до входа в частотный цикл, а затем на каждой частоте эти матрицы используются для построения результирующей матрицы схемы ${\mathbf{W}} = {\mathbf{A}} + j\omega {\mathbf{B}}$.
Формирование описания моделируемой схемы на основе вещественных частотно-независимых матриц позволяет существенно повысить эффективность расчета, так как при этом не требуется построения частных матриц компонентов на каждой частоте. Следует, однако, заметить, что практическая реализация такого подхода требует построения матриц компонентов в линейной форме W = A + sB, а это требует применения специальных алгоритмов формирования описания компонентов.
Задача формирования описания компонентов в линейной форме относительно частоты решается наиболее просто для двухполюсников R и C, для которых описание задается частной матрицей W = ${\mathbf{A}}_{y}^{{}}{\mathbf{Y}}_{{\text{м}}}^{0}{\mathbf{A}}_{y}^{T}$:
Отсюда для вещественных матриц A и B получаем выражения
Для двухполюсника типа L необходимо выполнить его описание на основе второй блочной строки уравнения в расширенном базисе узловых потенциалов (12), введя в вектор ${\mathbf{I}}_{z}^{{}}$ токовую переменнyю ik, что дает
Частотно-независимые матрицы A и B при этом имеют вид
Для управляемых источников p = w(s)q с частотно-зависимыми параметрами передаточную функцию w(s) можно представить в виде
(13)
$w(s) = \frac{{{{\alpha }_{0}} + {{\alpha }_{1}}s + ... + {{\alpha }_{m}}{{s}^{m}}}}{{{{\beta }_{0}} + {{\beta }_{1}}s + ... + {{\beta }_{n}}{{s}^{n}}}} = \frac{{\sum\limits_{i = 0}^{i = m} {{{\alpha }_{i}}{{s}^{i}}} }}{{\sum\limits_{i = 0}^{i = n} {{{\beta }_{i}}{{s}^{i}}} }}.$В случае вещественных корней полиномов можно записать выражение (13) в виде
где – элементарная функция первого порядка для типового обобщенного управляемого источника p = = w(s)q.
Чтобы получить линейную форму описания обобщенного управляемого источника p = w(s)q, следует использовать неявную форму уравнений. Так, для типового обобщенного управляемого источника с передаточной функцией
можно записать обобщенное уравнение в неявной форме

Конкретная реализация описания управляемого источника в линейной форме зависит от типа источника. Так, для источника напряжения, управляемого напряжением (источник типа ИНУН), имеем ${{w}_{0}} = {{\mu }_{0}},$ $q = {{u}_{1}},p = {{u}_{2}}$, и, следовательно, все входящие в уравнение (7) блочные матрицы содержат единственную составляющую и определяются выражениями

Если входные полюса источника ИНУН подключены к узлам n1+, n1–, а выходные полюса – к узлам n2+, n2– , то матрицы инциденций источника будут иметь вид
Уравнение (12) в этом случае имеет вид
Подставляя в это уравнение значения блочных матриц, получим частную матрицу W = A + sB управляемого источника типа ИНУН:
Следовательно, частотно-независимые матрицы A и B зависимого источника, управляемого напряжением, в линейной форме W = A + sB будут иметь вид
Аналогичным образом решается задача построения частотно-независимых матриц A и B линейной формы W = A + sB управляемых источников типа ИТУН, ИТУТ и ИНУТ.
ЗАКЛЮЧЕНИЕ
Представленная в данной работе технология построения распределенной системы автоматизации схемотехнического проектирования на основе веб-сервисов с применением архитектурного стиля RESTful создает следующие преимущества: надежность и конфиденциальность с учетом отсутствия данных о состоянии клиентского приложения, производительность за счет уменьшения запросов на сервер посредством применения алгоритмов явного кеширования, масштабируемость, прозрачность системы взаимодействия, возможность асинхронной модернизации узлов системы.
В работе проанализированы возможные способы расчета электронных схем в частотной области и показано, что наибольшей эффективностью обладает метод, основанный на построении частотно-независимых матриц в линейной форме W = A + sB, поскольку такой подход позволяет многократно использовать одно и то же описание компонентов схемы для всех частотных точек рабочего диапазона. Приводится методика построения математического описания компонентов схемы, позволяющая получить их описание в линейной форме.
Список литературы
Демичев А.П., Крюков А.П., Шамардин Л.В. // Программные продукты и системы. 2009. № 4. С. 55.
Сушко П.А., Чернышов Л.Н. // Технические науки: проблемы и решения: Сб. ст. по материалам XLIII Междунар. научно-практич. конф. “Технические науки: проблемы и решения”. М.: Интернаука, 2020. Вып. 12.
Чеглаков А.Л. // Инновационная наука. 2016. № 12. С. 118.
Сергеев О.А. // Современные научные исследования и инновации. 2019. № 2. С. 1.
Безрук П.А. // Актуальные проблемы авиации и космонавтики. 2017. Т. 2. № 13. С. 94.
Гаврилюк В.И. // Молодой ученый. 2020. № 13. С. 4.
Сигорский В.П., Петренко А.И. Алгоритмы анализа электронных схем. М.: Сов. радио, 1976.
Калабеков Б.А., Лапидус И.Ю., Малафеев В.М. Методы автоматизированного расчета электронных схем в технике связи. М.: Радио и связь, 1990.
Влах И., Сингхал К. Машинные методы анализа и проектирования электронных схем. М.: Радио и связь, 1988.
Гридин В.Н., Михайлов В.Б., Шустерман Л.Б. Численно-аналитическое моделирование радиоэлектронных схем. М.: Наука, 2008.
Тарасик В.П. Математическое моделирование технических систем. Минск: Дизайн ПРО, 2004.
Хайнеман Р. PSPICE – моделирование работы электронных схем. M.: Изд-во ДМК, 2005.
Морган С. Разработка распределенных приложений на платформе Microsoft. Net Framework. М.: Русская Редакция, 2008.
Гридин В.Н., Анисимов В.И. // Вычислит. технологии. 2020. Т. 25. № 6. С. 85.
Гридин В.Н., Анисимов В.И. // Докл. РАН. Математика, информатика, процессы управления. 2020. Т. 493. № 1. С. 51.
Дополнительные материалы отсутствуют.
Инструменты
Радиотехника и электроника