

Известия РАН. Теория и системы управления, 2022, № 4, стр. 31-37
БАЙЕСОВСКОЕ РАСПОЗНАВАНИЕ СОСТОЯНИЯ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ ДВИЖУЩЕГОСЯ ОБЪЕКТА: ИССЛЕДОВАНИЕ АЛГОРИТМА КОРРЕКЦИИ ВЕСА АПРИОРНОЙ ИНФОРМАЦИИ
О. В. Ермолин a, С. М. Мужичек b, В. И. Павлов c, *, Г. Г. Себряков b, А. А. Скрынников d, С. В. Толстых c
a ЦНИИ ВВС Минобороны России
Москва, Россия
b Государственный научно-исследовательский ин-т авиационных систем
Москва, Россия
c Тамбовский государственный технический ун-т
Тамбов, Россия
d МАИ (национальный исследовательский ун-т)
Москва, Россия
* E-mail: vpavl@mail.ru
Поступила в редакцию 11.01.2022
После доработки 24.01.2022
Принята к публикации 28.03.2022
- EDN: BXVIGE
- DOI: 10.31857/S0002338822040060
Аннотация
В рамках байесовского подхода разработан метод распознавания сигнально-помеховых ситуаций, возникающих при функционировании информационно-измерительной системы подвижного объекта. Предложен метод коррекции веса априорной информации в случае ее существенного отличия от апостериорной. Приведен вариант коррекции с использованием так называемых индикаторов сопутствующих признаков сигналов и помех. Показана целесообразность разработки новых методов обработки информации для конкретных практических приложений, в частности для информационно-измерительной системы подвижного объекта.
Введение. Информационно-измерительные системы (ИИС) подвижных объектов, как правило, подвержены действию естественных и преднамеренных помех в спектральном диапазоне их датчиков информации. Это, в частности, относится к бортовым радиолокационным станциям летательных аппаратов в силу открытости их информационных каналов [1–6]. Из-за действия помех, особенно преднамеренных [7–11], измерения фазовых координат относительного положения летательного аппарата и цели, выполняемые бортовой радиолокационной станцией, осуществляются с ошибками [12–14]. Одним из приемов обеспечения помехоустойчивости ИИС является адаптация их структуры к изменениям сигнально-помеховой обстановки [15–19]. Данную адаптацию целесообразно выполнять методами теории систем со случайной сменой структуры в пространстве состояний [20–23].
В [24] в рамках байесовского подхода разработан алгоритм распознавания сигнально-помеховых ситуаций, возникающих в результате воздействия организованных помех на ИИС, в котором помимо измерителей фазовых координат и априорной информации об интенсивностях смены сигнально-помеховых ситуаций используются так называемые индикаторы сопутствующих признаков сигналов и помех [25, 26]. В данном алгоритме при задержках принятия решений предусмотрена возможность оперативной коррекции априорной информации, в том числе за счет использования индикаторов сопутствующих признаков помех. В статье на упрощенном примере применительно к бортовой радиолокационной станции летательного аппарата исследуется целесообразность коррекции веса априорной информации в алгоритме распознавания сигнально-помеховых ситуаций.
1. Постановка задачи. В качестве подвижного объекта рассматривается летательный аппарат, располагающий ИИС на базе бортовой радиолокационной станции. Математические модели векторов фазовых координат подвижного объекта ${\mathbf{x}}$, сигналов измерений ${\mathbf{z}}$ и индикации сопутствующих признаков сигналов и помех ${\mathbf{r}}$, размерность которых соответственно равна ${{i}_{x}}$, ${{i}_{z}}$, ${{n}_{r}}$, имеют вид
(1.1)
${{{\mathbf{x}}}_{{k + 1}}} = {{{\mathbf{f}}}^{{(s)}}}({{{\mathbf{x}}}_{k}},{{{\mathbf{u}}}_{k}},{{{\mathbf{\xi }}}_{k}}),$(1.2)
${{{\mathbf{z}}}_{k}} = {{{\mathbf{h}}}^{{(s)}}}({{{\mathbf{x}}}_{k}},{{{\mathbf{\zeta }}}_{k}}),$Здесь $k$ – номер дискрета времени; ${\mathbf{u}}$ – вектор управлений размерностью ${{n}_{u}}$; ${\mathbf{\xi }}$, ${\mathbf{\zeta }}$ – соответственно векторы шумов состояния и измерения с размерностями ${{n}_{\xi }} = {{i}_{x}}$, ${{n}_{\zeta }} = {{i}_{z}}$; f, ${\mathbf{h}}$ – известные вектор-функции векторных аргументов; $\pi ({{J}_{k}},P{{r}_{k}})$ – матрица-строка условных вероятностей переходов индикаторов из состояния ${{r}_{{k - 1}}}$ в состояние ${{r}_{k}}$ с элементами πn, k(${{r}_{k}}\left| {{{r}_{{k - 1}}},\Pr )} \right.\, = \,P[{{r}_{k}},k,{{J}_{n}}$, Pr|rk – 1, k – 1, Jn, Pr], $n = \overline {1,N} $ – номер признака; $P[ \cdot ]$ – символ вероятности; ${{J}_{n}} = q(Pr,k|s,k)$ – входная индикаторная функция, характеризующая наличие признака организованной помехи; Pr – регистрируемый признак, $Pr = \overline {0,1} $; $s$ – номер сигнально-помеховой ситуации (см. табл. 1), каждой из которых соответствует аналогично обозначенная, предварительно разработанная структура ИИС, $s = \overline {1,S} $; ${{x}_{k}} = {{\left[ {{{x}_{{1,k}}},...,{{x}_{{i,k}}}} \right]}^{ \top }}$ – вектор фазовых координат подвижного объекта, $i = \overline {1,I} $, I – количество измеряемых фазовых координат.
Таблица 1.
Классификация сигнально-помеховых ситуаций
| $s$ | Маскирующая помеха | Имитирующая помеха | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ШШ | УШ | СШ | ХИ | … | УД | УС | МП | … | |
| 1 | – | – | – | – | – | – | – | ||
| 2 | + | – | – | – | + | + | – | ||
| … | |||||||||
| $s$ | – | – | – | + | – | – | |||
| … | |||||||||
| $l$ | – | – | + | + | – | – | + | ||
| … | |||||||||
| $S$ | – | + | – | – | – | + | – | ||
Алгоритм распознавания сигнально-помеховых ситуаций, в котором предусматривается возможность коррекции веса априорной информации, имеет следующий вид [24]:
(1.4)
$\hat {P}_{k}^{{(s)}} = \frac{{\tilde {P}_{k}^{{(s)}}\pi ({{J}_{k}},P{{r}_{k}})\exp [ - 0.5{{g}^{{(s)}}}(z)]}}{{\sum\limits_{s = 1}^S {\tilde {P}_{k}^{{(s)}}\pi ({{J}_{k}},P{{r}_{k}})\exp [ - 0.5{{g}^{{(s)}}}(z)]} }},$
(1.6)
${{g}^{{(s)}}}(z) = \sum\limits_{i = 1}^I {{{g}^{{(s)(i)}}}({{z}^{{(i)}}})} ,\quad s = \overline {1,S} ,\quad i = \overline {1,I} ,$(1.7)
${{g}^{{(s)(i)}}}({{z}^{{(i)}}}) = {{\left[ {\frac{{{{z}^{{(i)}}} - {{{\hat {x}}}^{{(s)(i)}}}}}{{{{\sigma }^{{(i)}}}}}} \right]}^{2}},$Здесь ${{z}^{{(i)}}}$, ${{\sigma }^{{(i)}}}$ – соответственно выходной сигнал i-го измерителя и его среднего квадратического отклонения; ${{\hat {x}}^{{(s)(i)}}}$ – среднее значение i-й фазовой координаты в s-й сигнально-помеховой ситуации; ${{\tilde {\gamma }}^{{(ls)}}}$, ${{\tilde {\gamma }}^{{(sl)}}}$ – априорные интенсивности смены сигнально-помеховых ситуаций; b – оптимизируемый коэффициент; $\Delta \tau $ – промежуток времени от момента изменения состояния любого из индикаторов сопутствующих признаков помех до момента изменения номера структуры s в соответствии с критерием (1.8); $\Delta t = {{t}_{k}} - {{t}_{{k - 1}}}$.
Требуется на основании (1.1)–(1.8) определить степень влияния соответствия априорных ${{\tilde {\gamma }}^{{(ls)}}}$, ${{\tilde {\gamma }}^{{(sl)}}}$ и фактических ${{\gamma }^{{(ls)}}}$, ${{\gamma }^{{(sl)}}}$ интенсивностей смены сигнально-помеховых ситуаций на эффективность принятия решения о сложившейся сигнально-помеховой ситуации и соответственно номере структуры ИИС подвижного объекта. Также требуется предложить рациональный вариант коррекции веса априорной информации в случаях ее несоответствия фактической.
2. Вариант исследования алгоритма распознавания сигнально-помеховых ситуаций. В общем случае основными измерительными каналами бортовой радиолокационной станции летательного аппарата являются угломерный $\alpha \beta $, дальности D и скорости сближения V с целью [27]. В качестве организованных помех измерительным каналам могут применяться маскирующие – широкополосные шумовые (ШШ), узкополосные шумовые (УШ), скользящие шумовые (СШ), хаотические импульсные (ХИ) и др., а также имитирующие – уводящие по дальности (УД), скорости (УС), мерцающие (МП) и др. в различных сочетаниях. При воздействии помех могут наблюдаться такие явления, как скачкообразное увеличение мощности принимаемого сигнала, увеличение количества принимаемых импульсов, интенсивное изменение частоты и др. Подобные явления могут регистрироваться соответствующими устройствами, называемыми индикаторами сопутствующих признаков – индикатором мощности (ИМ), счетчиком импульсов (СИ), частотным фильтром (ЧФ) и др.
Пусть по результатам предварительного анализа определены: перечень организованных помех; возможные сигнально-помеховые ситуации, составляющие полную группу несовместных событий; априорные интенсивности смены ${{\tilde {\gamma }}^{{(sl)}}}$ из s-й в l-ю и ${{\tilde {\gamma }}^{{(ls)}}}$ из l-й в s-ю сигнально-помеховых ситуаций; множество $N$ сопутствующих признаков Pr воздействия помех на ИИС. Вариант классификации сигнально-помеховых ситуаций при функционировании ИИС показан в виде табл. 1. Ожидаемые выходные сигналы измерителей и индикаторов сопутствующих признаков в соответствующих ситуациях приведены в табл. 2. На рис. 1 представлен фрагмент графа возможных взаимных переходов между ситуациями, а на рис. 2 – возможная реализация их смены.
Таблица 2.
Выходные сигналы информационных устройств
| $s$ | Измеритель | Индикатор | ||||||
|---|---|---|---|---|---|---|---|---|
| ${{\alpha \beta }}$ | $D$ | $V$ | … | ИМ | СИ | ЧФ | … | |
| 1 | $\alpha \beta $ | $D$ | $V$ | 0 | 0 | 0 | ||
| 2 | $\alpha \beta $ | ${{\sigma }_{D}}$ | ${{\sigma }_{V}}$ | 1 | 0 | 0 | ||
| … | ||||||||
| $s$ | $\alpha \beta $ | ${{D}_{{\text{и}}}}$ | ${{V}_{{\text{и}}}}$ | 1 | 1 | 0 | ||
| … | ||||||||
| $l$ | $\alpha \beta $ | ${{\sigma }_{D}}$ | ${{\sigma }_{V}}$ | 1 | 1 | 1 | ||
| … | ||||||||
| $S$ | $\alpha \beta $ | ${{\sigma }_{D}}$ | ${{\sigma }_{V}}$ | 1 | 0 | 1 | ||


Исследование алгоритма (1.4)–(1.8) осуществлялось следующим образом. Моделировалось движение летательного аппарата и функционирование его бортовой радиолокационной станции в беспомеховой обстановке в соответствии с рекомендациями из [27]. Воздействие организованных помех моделировалось путем изменения в случайные моменты времени сигнально-помеховых ситуаций из табл. 1. При этом априорные интенсивности переходов ${{\tilde {\gamma }}^{{(ls)}}}$, ${{\tilde {\gamma }}^{{(sl)}}}$ назначались в соответствии с правилами постановки помех, в то время как фактические ${{\gamma }^{{(ls)}}}$, ${{\gamma }^{{(sl)}}}$ задавались с помощью ключа на базе датчика случайных чисел. Предполагалось, что воздействие организованных помех приводило к существенному изменению в выражении (1.7) ${{\sigma }^{{(i)}}}$ из-за действия маскирующих и ${{z}^{{(i)}}}$ из-за действия имитирующих помех.
Моделирование функционирования индикаторов сопутствующих признаков сигналов и помех является предметом отдельного исследования и в данной статье не рассматривается. Элементы матрицы $\pi ({{J}_{k}},P{{r}_{k}})$ условных вероятностей переходов индикаторов из состояния ${{r}_{{k - 1}}}$ в состояние ${{r}_{k}}$ задавались в соответствии с физической сущностью воздействия помех на информационные каналы бортовой радиолокационной станции летательного аппарата.
В качестве показателей эффективности принятия решения о сложившейся сигнально-помеховой ситуации выступали: задержка $\Delta \tau $ – промежуток времени от момента изменения состояния любого из индикаторов сопутствующих признаков помех до момента изменения номера s в соответствии с критерием (1.8); уровень вероятности $\hat {P}_{k}^{{(s)}}$ сложившейся сигнально-помеховой ситуации относительно других ситуаций.
В процессе исследования рассматривались случаи изменения сигнально-помеховых ситуаций, при которых наблюдались низкие интенсивности шумов измерителей и корректное функционирование обнаружителей сопутствующих признаков помех. В первом случае априорно оцениваемые интенсивности переходов ${{\tilde {\gamma }}^{{(sl)}}}$, входящие в (1.5), соответствовали фактическим ${{\gamma }^{{(sl)}}}$. Время, затрачиваемое алгоритмом на принятие правильного решения, составляло величину порядка 0.01 < $\Delta \tau $ < 0.05, а значения апостериорных вероятностей ситуаций, складывающихся в текущий момент времени, находились в пределах 0.95 < $\hat {P}_{k}^{{(s)}}$ < 0.99. В описанных условиях алгоритм распознавания по своим динамическим характеристикам близок к ключевой схеме, что полностью подтверждает его работоспособность. Характеристики алгоритма существенно превосходят соответствующие характеристики оператора.
Во втором случае использовалась ложная априорная информация о переходах из s-й в l-ю помеховую ситуацию. Значения апостериорных вероятностей фиксировались после принятия решения об изменении помеховой ситуации. На рис. 3 и 4 показаны соответственно графики изменения $\hat {P}_{k}^{{(s)}}$ и $\Delta \tau $ в зависимости от $\rho = {{\tilde {\gamma }}^{{(ls)}}}{\text{/}}{{\gamma }^{{(ls)}}}$ для различных значений b = 1…100 с–1 в формуле (1.5). Моделирование проводилось на примере трех ($S$ = 3) сигнально-помеховых ситуаций с использованием одного измерителя и одного индикатора сопутствующего признака помехи. При этом ложная интенсивность переходов задавалась только в первую ситуацию (${{\gamma }^{{(sl)}}}$ = false).

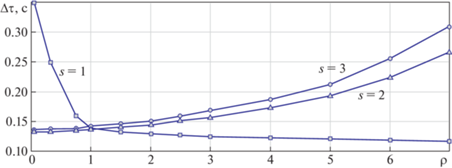
Из анализа графиков на рис. 3 и 4 можно сделать следующие выводы: при малых интенсивностях шумов измерителей и корректном функционировании индикаторов сопутствующих признаков причиной задержек в принятии решения о смене структуры ИИС подвижного объекта является несоответствие априорных и фактических интенсивностей смены ситуаций. Ошибки при назначении априорных интенсивностей переходов порядка 0.5 < $\rho $ < 5 оказывают слабое влияние на работу алгоритма, однако приводят к “затяжке” в принятии правильного решения до величины $\Delta \tau $ ≈ 0.2 с. Ложные решения появляются при значениях $\rho $ < 0.1 или $\rho $ > 10, т.е. при априорных ошибках в 10 и более раз. Уменьшение $\Delta \tau $ и соответственно увеличение $\hat {P}_{k}^{{(s)}}$ может быть достигнуто путем оперативной коррекции веса априорной информации, например, путем введения коэффициента B в формуле (1.5). При этом снижение веса априорной информации для алгоритма (1.4)–(1.8) более чем в 5 раз нецелесообразно.
Заключение. Информационные системы подвижных объектов с открытыми входными каналами весьма часто функционируют в условиях сложной и изменчивой сигнально-помеховой обстановки. Для корректного функционирования информационных систем априорная информация о характеристиках помех становится особенно актуальной при их большой интенсивности. Для случая, когда априорная информация является ложной, в статье предложен метод коррекции ее веса в алгоритме управления структурами информационной системы. Поиск правил решения (алгоритмов обработки информации), обеспечивающих минимизацию условного риска при изменяющихся параметрах сигналов и помех в процессе функционирования ИИС подвижных объектов, является актуальной задачей.
Список литературы
Верба В. C. Анализ состояния и тенденций развития бортовых РЛС авиационных комплексов радиолокационного дозора и наведения // Журнал радиоэлектроники. 2012. № 11. С. 2–15.
Авиационные радиолокационные комплексы и системы / Под ред. П.И. Дудника. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2006. 1112 с.
Радиоэлектронные системы. Основы построения и теория. Справочник. Изд. 2-е, перераб. и доп. / Под ред. Я.Д. Ширмана. М.: Радиотехника, 2007. 512 с.
Нечаев Е.Е., Дерябин К.С. Современные бортовые радиолокационные станции и антенные решетки многофункциональных авиационных комплексов военного назначения // Научный вестник МГТУ ГА. 2015. № 221. С. 90–105.
Купряшкин И.Ф., Лихачёв В.П., Рязанцев Л.Б. Малогабаритные РЛС с непрерывным частотно-модулированным излучением. Монография. М.: Радиотехника, 2020. 280 с.
Буйлов Е.Н., Горшков С.А. Моноимпульсный радиолокатор сопровождения по дальности и угловым координатам с широкополосным зондирующим сигналом // Журнал радиоэлектроники. 2021. № 6. С. 1–24.
Модели информационного конфликта средств поиска и обнаружения. Монография / Под ред. Ю.Л. Козирацкого. М.: Радиотехника, 2013. 232 с.
Куприянов А.И., Шустов Л.Н. Радиоэлектронная борьба. Основы теории. М.: Вузовская книга, 2011. 800 с.
Леньшин А.В. Бортовые системы и комплексы радиоэлектронного подавления. Воронеж: Научная книга, 2014. 590 с.
Емельянов Ю. Взгляды руководства ВС США на ведение электронной войны в операциях XXI века с использованием сил воздушно-космического нападения // Зарубежное военное обозрение. 2015. № 9. С. 63–72.
Погодин С. Обновление парка самолетов электронной войны ВВС США // Зарубежное военное обозрение. 2020. № 3. С. 55–58.
Артюшенко В.М., Воловач В.И. Статистические характеристики смеси сигнала и аддитивно-мультипликативных помех с негауссовским характером распределения // Радиотехника. 2017. № 1. С. 95–102.
Klemm R. Principles of Space-Time Adaptive Processing, 3rd ed. Radar, Sonar, Navigation and Avionics. Ser. 21. The Institution of Electrical Engineers and Technology. UK, 2006. 670 p.
Поздняков А.А., Шаталов А.А., Шаталова В.А. Алгоритм распознавания медленно и быстро флуктуирующих целей на фоне помех многочастотной РЛС с ФАР // Вестник воздушно-космической обороны. 2019. Вып. 2(22). С. 85–95.
Abramovich Y.I., Spenser N.K., Gorokhov A.Y. A Modified GLRT and AMF Framework for Diagonally Loaded and Fast Maximum-Likelihood Adaptive Detectors // IEEE Trans. on Aerospace and Electr. Systems. 2007. V. 43. № 3. P. 1017–1051.
Анохин В.Д., Фаузи С., Кильдюшевская В.Г. Обработка радиолокационных сигналов на фоне комбинированных помех // Радиотехника. 2009. № 5. С. 133–135.
Макаров П.А., Колтышев Е.Е., Мухин В.В., Сусляков Д.Ю. Адаптивная пространственно-временная обработка сигнала для селекции наземных движущихся целей в моноимпульсной РЛС // Вестник воздушно-космической обороны. 2014. № 4. С. 55–67.
Xu J., Zhu S., Liao G. Space-time-range Adaptive Processing for Airborne Radar Systems // IEEE Sensors J. 2015. V. 15. № 3. P. 1602–1610.
Peto T., Seller R. Space-time Adaptive Cancellation in Passive Radar Systems // Intern. J. Antennas Propag. 2018. V. 2018. P. 1–16.
Казаков И.Е., Артемьев В.М., Бухалёв В.А. Анализ систем случайной структуры. М.: Физматлит, 1993. 272 с.
Бухалёв В.А. Оптимальное сглаживание в системах со случайной скачкообразной структурой. М.: Физматлит. 2013. 188 с.
Болдинов В.А., Бухалёв В.А., Скрынников А.А. Игровое управление случайной скачкообразной структурой объекта в чистых стратегиях // Изв. РАН. ТиСУ. 2020. № 4. С. 18–27.
Павлов В.И. Синтез помехоустойчивых информационных систем методами теории систем со случайной структурой // Радиотехника. 2000. № 3. С. 89–92.
Muzhichek S.M., Sebryakov G.G., Pavlov V.I., Tolstych S.V., Kenzhekhanova M.B. Bayesian Recognition of a Moving Object Information-measuring System State: A Priori Information Weight Correction // IOP Conf. Series: Materials Science and Engineering: 2020 Workshop on Materials and Engineering in Aeronautics (MEA 2020). Moscow, 2020.
Бухалёв В.А. Рекуррентные алгоритмы распознавания и оценивания состояния динамического объекта по информации от измерителей и индикаторов // Изв. АН. Техн. кибернетика. 1992. № 1. С. 148–156.
Павлов В.И. Оптимальное обнаружение изменения свойств случайных последовательностей по информации измерителя и индикатора // АиТ. 1998. № 1. С. 86–94.
Авиационные системы радиоуправления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза и анализа / Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2003. 192 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления