

Известия РАН. Теория и системы управления, 2022, № 4, стр. 3-21
О СВОЙСТВАХ ПРЕДЕЛЬНЫХ МНОЖЕСТВ УПРАВЛЯЕМОСТИ ДЛЯ КЛАССА НЕУСТОЙЧИВЫХ ЛИНЕЙНЫХ СИСТЕМ С ДИСКРЕТНЫМ ВРЕМЕНЕМ И l1-ОГРАНИЧЕНИЯМИ
Д. Н. Ибрагимов a, *, А. В. Осокин a, А. Н. Сиротин a, **, К. И. Сыпало a
a МАИ (национальный исследовательский ун-т), ФГУП ЦАГИ им. Н.Е. Жуковского
Москва, Россия
* E-mail: rikk.dan@gmail.com
** E-mail: asirotin2@yandex.ru
Поступила в редакцию 10.02.2022
После доработки 03.03.2022
Принята к публикации 28.03.2022
- EDN: IADLEJ
- DOI: 10.31857/S0002338822040102
Аннотация
Обсуждаются вопросы построения множеств достижимости и управляемости для линейных систем с дискретным временем и суммарным ограничением на скалярное управление в смысле l1-нормы. Для классов не полностью управляемых и не полностью достижимых линейных систем предельные множества управляемости и достижимости соответственно построены явным образом. Приведены примеры.
Введение. При решении задач управления динамическими системами нередко приходится учитывать различные ограничения, связанные с техническими аспектами изучаемой системы. Такого рода ограничения приводят к тому, что система из заданного начального состояния может быть переведена в ограниченное множество терминальных состояний даже при бесконечном временном горизонте. Данный факт делает актуальным исследование не только вопросов достижимости и управляемости различных динамических систем, но и разработку методов построения и оценивания предельных множеств достижимости и управляемости для произвольной системы управления. Кроме того, множества управляемости и достижимости могут быть использованы в ряде задач оптимального управления для формирования позиционного управления [1, 2] для систем с дискретным временем.
В случае линейных систем с дискретным временем и скалярным управлением, не ограниченным в смысле lp-нормы, известно, что множества достижимости и управляемости за конечное число шагов представляют собой выпуклые многогранники [1]. Однако данное свойство при переходе к бесконечному времени может не сохраняться. Более того, в [3–5] продемонстрировано, что в общем случае предельное множество управляемости и достижимости представляет собой цилиндрическое множество с выпуклым сечением. Принципиальная управляемость и достижимость такой линейной системы управления определяется структурой ее матрицы, а именно расположением ее собственных значений относительно круга единичного радиуса с центром в нуле на комплексной плоскости.
Тем не менее данные результаты относятся к линейным системам без суммарного ограничения на последовательность управляющих воздействий [1, 3, 4]. С другой стороны, зачастую ограничения на функцию управления являются гладкими [2, 6, 7], что связано с необходимыми условиями применимости классических оптимизационных методов [8, 9], хотя с точки зрения технической реализации рассматриваемой математической модели более корректно было бы использовать линейные или кусочно-линейные ограничения. Например, при описании задачи коррекции орбиты спутника [10, 11] следует учитывать два типа ограничений на управление: ограничение на силу каждого корректирующего импульса, обусловленное мощностью двигателя, и ограничение, связанное с количеством топлива. Последнее в математической модели движения спутника может быть представлено в виде ограничения на сумму модулей всех управляющих воздействий.
В статье изучаются вопросы построения предельных множеств достижимости и управляемости систем с интегральным ограничением на управление в смысле l1-нормы. Принципиальной особенностью данной работы является то, что данные множества удается построить явным образом. В разд. 2 в виде леммы сформулированы основные свойства множеств достижимости линейных систем с дискретным временем и скалярным ограниченным управлением, в частности доказано, что каждое такое множество представляет собой выпуклый и симметричный относительно начала координат многогранник. Также в разд. 2 доказано, что аналогичные свойства справедливы и для предельных множеств управляемости не полностью достижимых систем. В разд. 3 приведены важные следствия из данных утверждений, в частности доказаны аналогичные свойства для множеств управляемости не полностью управляемых систем и представлены оценки множества вершин предельных множеств управляемости и достижимости. В разд. 4 полученные теоретические результаты продемонстрированы на примерах построения множеств управляемости и достижимости для различных систем управления.
1. Формулировка задачи. Рассматривается автономная линейная система с дискретным временем
(1.1)
$x\left( {k + 1} \right) = Ax\left( k \right) + bu\left( k \right),\quad k \in {{\mathbb{Z}}_{ + }} = \left\{ {0,1, \ldots } \right\}$(1.2)
$\sum\limits_{k = 0}^\infty {\left| {u\left( k \right)} \right| \leqslant t} ,\quad t \in \left( {0,\infty } \right).$Это ограничение можно рассматривать как ограничение на l1-норму последовательностей управлений ${{\left\{ {u\left( k \right)} \right\}}_{{k \in {{\mathbb{Z}}_{ + }}}}}$. Здесь $x\left( k \right) \in {{\mathbb{R}}^{n}}$ – вектор состояния; $A \in {{\mathbb{R}}^{{n \times n}}}$, $b \in {{\mathbb{R}}^{n}}$ – соответствующие матрицы системы; $u\left( k \right) \in \mathbb{R}$ – скалярное управление в момент времени $k \in {{\mathbb{Z}}_{ + }}$; $t \in \left( {0,\infty } \right)$ – произвольный параметр, характеризующий суммарные энергозатраты для управления.
Считается, что система (1.1) без ограничений на управления является управляемой, т.е. выполнено ранговое условие Калмана
(1.3)
$\operatorname{rank} (\left. b \right|\left. {Ab} \right| \cdots {\text{|}}{{A}^{{n - 1}}}b) = n.$Пусть ${{\mathcal{Y}}_{t}}\left( k \right) \subset {{\mathbb{R}}^{n}}$ – множество достижимости системы (1.1), (1.2) за k шагов, т.е. это множество всех возможных терминальных состояний системы, в которые она может попасть из 0 за k шагов посредством использования допустимых в смысле ограничений (1.2) управлений:
Через ${{\mathcal{Y}}_{t}}$ обозначается предельное множество достижимости:
Аналогично вводится множество ${{\mathcal{X}}_{t}}\left( k \right)$ 0-управляемости за k шагов дискретной системы, определяемой соотношениями (1.1) и (1.2). Это множество всех возможных начальных состояний x(0) системы, из которых она может попасть в 0 за k шагов посредством использования допустимых в смысле ограничений (1.2) управлений:
Здесь ${{\mathcal{X}}_{t}}$ – предельное множество $0$-управляемости:
Обозначим через $\sigma \left( A \right) = \left\{ {{{\alpha }_{1}}, \ldots ,{{\alpha }_{n}}} \right\} \subset \mathbb{C}$ спектр матрицы A, т.е. множество всех собственных значений A с учетом кратности. Целью статьи является исчерпывающее описание множеств ${{\mathcal{X}}_{t}}$ и ${{\mathcal{Y}}_{t}}$ для одного класса систем, удовлетворяющих соотношениям (1.1)–(1.3). Более точно будут изучаться предельные множества достижимости ${{\mathcal{Y}}_{t}}$ для асимптотически устойчивых систем, т.е. тех систем, для которых справедливо условие
(1.4)
$\rho \left( A \right): = \mathop {\max }\limits_{{{\alpha }_{i}} \in \sigma \left( A \right)} \left| {{{\alpha }_{i}}} \right| < 1.$Аналогично изучаются множества 0-управляемости ${{\mathcal{X}}_{t}}$ для неустойчивых систем с условием
(1.5)
$\mathop {\min }\limits_{{{\alpha }_{i}} \in \sigma \left( A \right)} \left| {{{\alpha }_{i}}} \right| > 1.$Оказывается, что для выделенного класса систем (1.1)–(1.3) множества управляемости могут быть описаны явным образом, что приводит к возможности конструктивного построения допустимых управлений в задачах оптимального управления.
2. Множества достижимости. Охарактеризуем основные свойства множеств достижимости ${{\mathcal{Y}}_{t}}\left( k \right)$ системы (1.1)–(1.2). В данном случае не требуется использование условия управляемости Калмана (1.3). Здесь и везде далее через $\operatorname{conv} \left( \mathcal{Y} \right)$ обозначена выпуклая оболочка множества $\mathcal{Y} \subset {{\mathbb{R}}^{n}}$ – наименьшее по включению выпуклое множество, содержащее $\mathcal{Y}$ в качестве подмножества [9, 12].
Лемма. Для каждого натурального k справедливы утверждения:
(i) ${{\mathcal{Y}}_{t}}\left( k \right)$ – полиэдр;
(ii) множество ${{\mathcal{Y}}_{t}}\left( k \right)$ замкнуто, ограничено и симметрично относительно 0;
(iii) ${{\mathcal{Y}}_{t}}\left( k \right)$ – выпуклый многогранник, т.е.
Здесь
(iv) $0 \in \operatorname{int} {{\mathcal{Y}}_{t}}\left( k \right)$ при $k \geqslant n$;
(v) ${{\mathcal{Y}}_{t}}\left( k \right) \subset {{\mathcal{Y}}_{t}}\left( m \right)$ при $m \geqslant k$;
(vi) ${{\mathcal{Y}}_{t}}\left( k \right) = t{{\mathcal{Y}}_{1}}\left( k \right)$;
(vii) ${{\mathcal{Y}}_{t}}\left( k \right) \cap {{\mathcal{Y}}_{t}}\left( m \right) \ne \emptyset $ при $k,m \in \mathbb{N}$.
Доказательство леммы приведено в Приложении.
В силу определения предельное множество достижимости ${{\mathcal{Y}}_{t}}$ есть счетное объединение множеств достижимости ${{\mathcal{Y}}_{t}}\left( k \right)$ за k шагов, и поэтому некоторые перечисленные выше свойства могут перестать быть верными. Здесь будут рассмотрены особенности предельного множества достижимости ${{\mathcal{Y}}_{t}}$ для асимптотически устойчивой системы, определяемой соотношениями (1.1), (1.2) и (1.4), т.е. когда все собственные значения матрицы A лежат внутри единичного круга на комплексной плоскости. Как известно [3, 4], данная ситуация соответствует системе, которая не является полностью достижимой, т.е. вектор состояния которой может попасть за конечное число шагов из 0 не во все точки пространства ${{\mathbb{R}}^{n}}$.
Теорема. Пусть для системы (1.1)–(1.2) выполняются условия (1.3) и (1.4). Тогда существует $K \in \mathbb{N}$, такое, что
Доказательство теоремы приведено в Приложении.
3. Следствия теоремы. Нижним пределом последовательности множеств ${{\left\{ {{{\mathcal{Y}}_{t}}\left( k \right)} \right\}}_{{k \in \mathbb{N}}}}$ [13, Гл. 1, § 1, п. 1] называется множество $\lim \inf {{\mathcal{Y}}_{t}}\left( k \right)$, состоящее из точек, принадлежащих всем множествам ${{\left\{ {{{\mathcal{Y}}_{t}}\left( k \right)} \right\}}_{{k \in \mathbb{N}}}}$, кроме, быть может, конечного их числа.
Следствие 1. Пусть для системы (1.1)–(1.2) выполняются условия (1.3), (1.4). Тогда справедливо равенство
Доказательство. Формализуя определение нижнего предела последовательности множеств, получаем
В силу утверждения (v) леммы находим
Аналогично верхним пределом последовательности множеств ${{\left\{ {{{\mathcal{Y}}_{t}}\left( k \right)} \right\}}_{{k \in \mathbb{N}}}}$ [13, Гл. 1] называется множество $\lim \sup {{\mathcal{Y}}_{t}}\left( k \right)$, состоящее из точек, принадлежащих бесконечному числу различных множеств ${{\left\{ {{{\mathcal{Y}}_{t}}\left( k \right)} \right\}}_{{k \in \mathbb{N}}}}$. Формализуя определение, получаем
В силу утверждения (v) леммы приходим к равенствам
Окончательно
Следствие 2. Предельное множество достижимости ${{\mathcal{Y}}_{t}}$ обладает всеми свойствами (i), (ii), (iv), (vi) леммы множеств достижимости ${{\mathcal{Y}}_{t}}\left( k \right)$ для конечного числа шагов $k \geqslant n$.
Данное утверждение вполне объясняется использованием предельного перехода в следствии 1.
Из теоремы вытекает, что число K определяется не единственным образом. Тем не менее, выберем соответствующее минимальное число из (2.1):
(3.1)
${{K}_{{\min }}} = \min \left\{ {K:{{\mathcal{Y}}_{t}} = {{\mathcal{Y}}_{t}}\left( K \right)} \right\}.$Число Kmin из (3.1) можно эффективно оценить сверху. Действительно, поскольку в конечномерном линейном пространстве ${{\mathbb{R}}^{n}}$ нормы эквивалентны [14, Гл. 3, § 4], то имеется хотя бы одно число $\gamma \in \left( {0,\infty } \right)$, такое, что для произвольного $y = {{\left( {{{y}_{1}}, \ldots ,{{y}_{n}}} \right)}^{{\text{T}}}} \in {{\mathbb{R}}^{n}}$
(3.2)
${{\left\| y \right\|}_{{{{\mathcal{Y}}_{t}}\left( n \right)}}} \leqslant \gamma {{\left\| y \right\|}_{1}},$Введем в рассмотрение функционал Минковского выпуклого множества $\mathcal{A} \subset {{\mathbb{R}}^{n}}$, у которого $0 \in \operatorname{int} \mathcal{A}$, определяемый [9, 12, 14] по формуле
(3.3)
$\mu \left( {x,\mathcal{A}} \right) = \inf \left\{ {\lambda > 0:x \in \lambda \mathcal{A}} \right\},\quad x \in {{\mathbb{R}}^{n}}.$В силу [12, теорема 15.2; 14, Гл. III, § 2, теорема 3] определения (3.3), эта формула задает некоторую норму в ${{\mathbb{R}}^{n}}$:
(3.4)
${{\left\| x \right\|}_{{{{\mathcal{Y}}_{t}}\left( k \right)}}}: = \mu \left( {x,{{\mathcal{Y}}_{t}}\left( k \right)} \right),\quad k \geqslant n,\quad x \in {{\mathbb{R}}^{n}}.$Из (3.3) и (3.4) получаем
Следовательно, найдется вектор ${{u}^{n}} = {{\left( {{{u}_{1}}, \ldots ,{{u}_{n}}} \right)}^{{\text{T}}}} \in {{\mathbb{R}}^{n}}$, такой, что
По условию (1.3) матрица An невырождена и тогда
Теперь получаем последовательно
Таким образом, можно положить
и, следовательно, неравенство (3.2) установлено.Если найдется ${{K}_{1}} \in \mathbb{N}$, такое, что
(3.5)
${{\left\| {{{A}^{k}}b} \right\|}_{{{{\mathcal{Y}}_{t}}\left( n \right)}}} \leqslant 1\quad {\text{при}}\quad k \geqslant {{K}_{1}},$Действительно, из (3.4) и (3.5) следует включение
В силу п. (v) леммы верно включение
и, следовательно,Так как
Таким образом,
В силу теоремы Шура [15, теорема 2.3.1] об унитарности триангуляции найдутся унитарная матрица U и верхняя треугольная матрица $\Lambda $, такие, что
Положим
Выберем $\delta > 0$ и соответствующую матрицу
Затем вычислим матрицу
Теперь положим
и введем соответствующую векторную норму ${{\left\| {\, \cdot \,} \right\|}_{{{{C}_{\delta }}}}}:{{\mathbb{R}}^{n}} \to \left[ {0,\infty } \right),$ определяемую по формулеСоответствующая матричная норма ${{\left\| {\, \cdot \,} \right\|}_{{{{C}_{\delta }}}}}:{{\mathbb{R}}^{{n \times n}}} \to \left[ {0,\infty } \right)$ порождается векторной нормой ${{\left\| {\, \cdot \,} \right\|}_{{{{C}_{\delta }}}}}$ и для $A \in {{\mathbb{R}}^{{n \times n}}}$ определяется формулой
Далее получаем для $k \in \mathbb{N}$
Полагая $\delta > 1,$ оценим величину
Выберем число $\delta $ произвольно из условия
Здесь используется условие (1.4). Зафиксируем выбранную постоянную $\delta $ из этого неравенства, тогда верно неравенство
иПоскольку $\delta $ не зависит от параметра k, то соответствующие величины
(3.7)
$\gamma {{\left\| {C_{\delta }^{{ - 1}}} \right\|}_{1}}\left\| A \right\|_{{{{C}_{\delta }}}}^{{{{K}_{2}}}}{{\left\| b \right\|}_{{{{C}_{\delta }}}}} \leqslant 1$Таким образом,
и выполняется неравенство(3.9)
${{\left\| {{{A}^{k}}b} \right\|}_{{{{\mathcal{Y}}_{t}}\left( n \right)}}} \leqslant 1\quad {\text{при}}\quad k \geqslant {{K}_{2}}.$Действительно, получаем
Сказанное представляет собой соответствующее утверждение.
Следствие 3. Для минимального числа шагов множеств достижимости из (3.1) справедливы оценки
определяемые соотношениями (3.5), (3.6) и (3.8), (3.9).Представленные ранее результаты могут быть расширены на некоторый более широкий класс систем (1.1), (1.2). При этом доказательства изменяются незначительно, и поэтому они опущены.
Следствие 4. Пусть имеется последовательность вещественных чисел ${{\left\{ {{{\nu }_{k}}} \right\}}_{{k \in {{\mathbb{Z}}_{ + }}}}}$, такая, что
Если $\mathcal{Y}_{t}^{\nu }\left( k \right)$ и $\mathcal{Y}_{t}^{\nu }$ – соответствующие множества достижимости, то выполняются аналогичные условия леммы и теоремы и, следовательно, $\mathcal{Y}_{t}^{\nu }$ – выпуклый многогранник.
Поскольку предельное множество достижимости есть выпуклый многогранник, то существует возможность воспользоваться классическим результатом из выпуклого анализа и оценить количество допустимых управлений, необходимых для достижения заданного терминального состояния.
Следствие 5. Для каждого $y \in {{\mathcal{Y}}_{t}}$ найдутся не более n + 1 ненулевых допустимых управлений $\left\{ {u{\kern 1pt} {\text{*}}({{k}_{1}}), \ldots ,u{\kern 1pt} {\text{*}}({{k}_{{n + 1}}})} \right\}$, таких, что
При этом минимальное число шагов для терминального состояния $y \in {{\mathcal{Y}}_{t}}$ определяется числом Kmin и оценками из следствия 3.
Доказательство. В силу теоремы для произвольного $y \in {{\mathcal{Y}}_{t}}$ верно включение
Положим
Тогда получаем запись, эквивалентную утверждению следствия.
Опишем аналогичные свойства множеств 0-управляемости для рассматриваемого класса систем.
Следствие 6. Для систем (1.1)–(1.3) и (1.5) множества 0-управляемости ${{\mathcal{X}}_{t}}\left( k \right)$ за конечное число шагов обладают свойствами, аналогичными свойствам леммы.
Для предельного множества 0-управляемости ${{\mathcal{X}}_{t}}$ выполняется утверждение, аналогичное теореме.
Доказательство. Для систем (1.1), (1.2) введем обозначения
Справедливо равенство
(3.10)
${{\mathcal{X}}_{t}}{{,}_{A}}\left( k \right) = {{A}^{{ - 1}}}{{\mathcal{Y}}_{t}}{{,}_{{{{A}^{{ - 1}}}}}}\left( k \right).$Действительно, согласно определению $y \in {{\mathcal{Y}}_{t}}{{,}_{{{{A}^{{ - 1}}}}}}\left( k \right)$, если и только если
Полагая
Обратно, если $x \in {{\mathcal{X}}_{t}}{{,}_{{{{A}^{{ - 1}}}}}}\left( k \right)$, то
Снова делая замену
Равенство (3.10) доказано.
Ясно, что теперь следствие 6 вытекает из (3.10) и утверждений леммы и теоремы.
4. Комментарии и примеры. В данном разделе построим различные примеры, демонстрирующие основные результаты леммы и теоремы.
Пример 1. Положим размерность фазового пространства n = 2, матрицу системы определим следующим образом:
При этом для любого $b \in {{\mathbb{R}}^{2}}{{\backslash }}\left\{ 0 \right\}$ данная система удовлетворяет условиям (1.3) и (1.4).
Величина Kmin, определяемая соотношениями (3.1), в действительности сильно зависит от вектора b. В общем случае справедливо равенство
Если предположить, что ${{b}_{2}} = 0$, то с учетом п. (iii) леммы и теоремы получим, что
Таким образом, ${{K}_{{\min }}} = 1$.
Если предположить, что ${{b}_{1}} = 0$, то с учетом п. (iii) леммы верно равенство
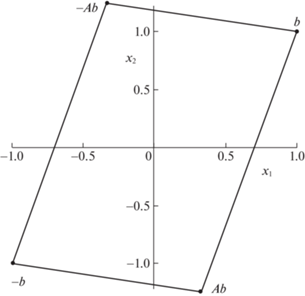
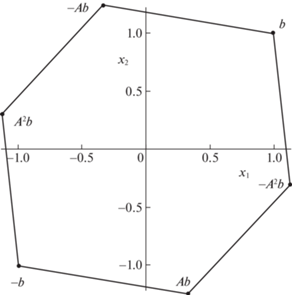
Если положить
то для $k \geqslant 3$ верно, чтоОтсюда следуют включения
Тогда с учетом теоремы верно, что
При этом следующая система несовместна:
Отсюда следует, что $t{{A}^{2}}b \notin {{\mathcal{Y}}_{t}}(2)$, т.е.
Окончательно получим равенство ${{K}_{{\min }}} = 3.$
Для случая $b = {{\left( {\begin{array}{*{20}{c}} 1&1 \end{array}} \right)}^{{\text{T}}}}$, t = 1 построим соответствующие множества достижимости графически. Результаты проиллюстрированы на рис. 1–3.



Пример 2. С учетом следствия 5 и равенства (3.10) построенные в примере 1 множества достижимости ${{\mathcal{Y}}_{t}}(k)$ можно преобразовать в множества 0-управляемости системы (1.1), порождаемой матрицей системы:
Согласно [12, следствие 19.5.1], для случая ${{b}_{1}} = 0$ справедливо следующее равенство:
Пример 3. Рассмотрим случай комплексных собственных значений матрицы A, удовлетворяющих условию (1.4):
Тогда для любых $b \in {{\mathbb{R}}^{2}}$ и $k \in {{\mathbb{Z}}_{ + }}$ справедливо представление
Заключение. Рассмотрены методы построения предельных множеств достижимости и управляемости для линейных систем с дискретным временем и ограниченным скалярным управлением. Предполагается, что управление как функция времени является ограниченной последовательностью в смысле l1-нормы.
Для случая, когда собственные значения матрицы системы не превосходят 1 по модулю, т.е. для не полностью достижимых систем, предельные множества достижимости удается построить явным образом: доказано, что они представляют собой выпуклый, симметричный относительно начала координат многогранник. При этом в п. (iii) леммы дано описание вершин данного многогранника. Также доказано, что последовательность множеств управляемости за конечное число шагов в этом случае представляет собой, начиная с некоторого Kmin, постоянную последовательность. В следствии 3 предложена конструктивная оценка величины Kmin.
Полученные результаты для множеств достижимости обобщены и для построения множеств 0-управляемости не полностью управляемых систем, т.е. тех систем собственные значения матриц которых по модулю строго больше 1. Данный факт сформулирован в следствии 6.
В качестве демонстрации основных результатов данной работы приведены примеры и иллюстрации построения множеств управляемости и достижимости для различных линейных систем с дискретным временем.
Список литературы
Ибрагимов Д.Н., Сиротин А.Н. О задаче оптимального быстродействия для линейной дискретной системы с ограниченным скалярным управлением на основе множеств 0-управляемости // АиТ. 2015. № 9. С. 3–30.
Пропой А.И. Элементы теории оптимальных дискретных процессов. М.: Наука, 1973. 256 с.
Сиротин А.Н., Формальский А.М. Области достижимости и управляемости линейных дискретных систем // Изв. АН. ТиСУ. 2002. № 4. С. 5–16.
Formalsky A.M., Sirotin A.N. On the Geometric Properties of Reachable and Controllable Sets for Linear Discrete Systems // J. Optimization Theory and Applications. 2004. V. 122. № 2. P. 17–44.
Сиротин А.Н. Точное аналитическое описание множеств достижимости асимптотически устойчивых линейных дискретных систем с ограниченным по l1-норме скалярным управлением // Вестн. МАИ. 2008. Т. 15. № 2. С. 142–146.
Болтянский В.Г. Оптимальное управление дискретными системами. М.: Наука, 1973. 447 с.
Табак Д., Куо Б. Оптимальное управление и математическое программирование. М.: Наука, 1975. 280 с.
Ашманов С.А., Тимохов А.В. Теория оптимизации в задачах и упражнениях. М.: Наука, 1991. 448 с.
Половинкин У.С., Балашов М.В. Элементы выпуклого и сильно выпуклого анализа. М.: Физматлит, 2007. 440 с.
Козорез Д.А., Красильщиков М.Н., Кружков Д.М., Сыпало К.И. Решение навигационной задачи при автономном выведении полезной нагрузки на геостационарную орбиту с помощью двигателя малой тяги // Изв. АН. ТиСУ. 2015. № 5. С. 106–118.
Козорез Д.А., Красильщиков М.Н., Кружков Д.М., Сыпало К.И. Интегрированная навигационная система космического аппарата на геостационарной и высокоэллиптической орбитах, функционирующая в условиях активных помех // Изв. АН. ТиСУ. 2013. № 3. С. 143–154.
Рокафеллар Р. Выпуклый анализ. М.: Мир, 1973. 471 с.
Ульянов П.Л., Бахвалов А.Н., Дьяченко М.И., Казарян К.С., Сифуэнтес П. Действительный анализ в задачах. М.: Физматлит, 2005. 416 с.
Колмогоров А.Н., Фомин С.В. Элементы теории функций и функционального анализа. М.: Наука, 1981. 544 с.
Хорн Р., Джонсон И. Матричный анализ. М.: Мир, 1989. 667 с.
Лейхтвейс К. Выпуклые множества. М.: Наука, 1983. 336 с.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Теория и системы управления