

Теплоэнергетика, 2023, № 1, стр. 50-57
Вероятностная оценка результата работы модели раннего обнаружения аварийных ситуаций на оборудовании электростанций на основе метода наименьших потенциалов
А. А. Коршикова a, *, О. М. Идзон a
a ООО “Инконтрол”
115280 Москва, ул. Ленинская Слобода, д. 23, стр. 2, Россия
* E-mail: korshikova@incntrl.ru
Поступила в редакцию 17.05.2022
После доработки 07.06.2022
Принята к публикации 28.06.2022
Аннотация
Данная статья – продолжение опубликованной ранее работы [1], в которой приведено описание разработанного в ООО “Инконтрол” метода, основанного на методе потенциалов, суть которого состоит в расчете некоего показателя, характеризующего степень “удаленности” текущего состояния технологического оборудования энергоблока от состояний, признанных нормальными. Этот показатель в математическом смысле подобен электрическому потенциалу, который создает точка, являющаяся характеристикой состояния оборудования в многомерном пространстве состояний, образованном измеряемыми на этом оборудовании технологическими параметрами – координатами данного пространства состояний. Таким образом, задача обнаружения аномальности функционирования технологического оборудования энергоблока сводится к расчету критерия аномальности (“потенциала”), принимающего значения от 0 до 1. Описанный в [1] метод хотя и показал себя вполне работоспособным, однако имеет ряд существенных недостатков. Например, вычисляемый показатель аномальности представляет собой довольно неочевидно интерпретируемый индикатор неисправности диагностируемого технологического оборудования, из-за чего, в частности, для недопущения ложно-положительных результатов его значение приходится “загрублять”, увеличивая при этом ложно-отрицательные. Другой недостаток заключается в том, что в существующем виде метод диагностирует приближение к аномальному режиму и его возникновение, но ничего не говорит о сроках появления возможной неисправности. И, наконец, не реализована возможность определения технологических параметров, внесших наибольший вклад в диагностирование аномальности. В данной статье показан переход от в значительной степени абстрактного показателя аномальности – “потенциала” к вероятностной оценке состояния технологического оборудования энергоблоков, благодаря чему можно не только диагностировать начало развивающейся неисправности, но и прогнозировать время ее наступления. Кроме того, описываемая в статье модель позволяет в случае обнаружения аномальности выдавать технологу ранжированный список технологических параметров диагностируемого оборудования, наиболее повлиявших на вероятностную оценку возникновения аномальности. Предложенная модель была построена на архивных данных длительного периода эксплуатации оборудования и проверена на периоде, содержащем аномалию. Результат тестирования позволяет говорить о достоверности и наглядности предложенного метода.
Энергетика, следуя мировой тенденции цифровизации, непрерывно находится в поиске способа обработки и анализа данных, поступающих от технологического оборудования [2].
Многие крупные производители энергетического оборудования и средств автоматизации создали в своих структурах прогнозно-аналитические подразделения и на их основе центры удаленного мониторинга. Так, например, АО “Ротек” разработало систему предиктивной аналитики и удаленного мониторинга “Прана” с помощью оценки многомерных состояний (MVSM) [3]. Компания Siemens имеет несколько продуктов, так или иначе связанных с аналитикой и предсказанием состояния оборудования, некоторые из которых – диагностический пакет SPPA D-3000 Plant Monitor на нейронных сетях [4] и MindSphere, представляющий собой решения промышленного интернета вещей [5]. У компании GE также имеется несколько аналитических платформ: Predix для передачи данных от периферии к облаку, обеспечивающая в том числе выполнение аналитики GE Digital Twin [6], и SmartSignal, помогающая прогнозировать, обнаруживать и предотвращать отказы оборудования на основе аналитики Digital Twin [7]. Решение компании AVEVA Predictive Analytics обеспечивает раннее выявление и диагностику проблем оборудования также с использованием искусственного интеллекта [8].
Компанией ООО “Инконтрол” была создана своя система предиктивной аналитики, основанная на методе потенциалов [1], суть которого состоит в определении некоего показателя аномальности текущего состояния диагностируемого технологического оборудования (ДТО), подобного в математическом смысле “потенциалу” точки в пространстве состояний признаков, характеризующих состояние ДТО относительно точек обучающего множества. Этот метод положительно показал себя на пробных тестах в проектах ООО “Инконтрол”. Однако вычисляемый данным методом показатель аномальности имеет очевидные трудности в интерпретации степени близости к аварийному состоянию диагностируемого технологического оборудования и является неоднозначным для разных технологических режимов и видов ДТО. В связи с этим была проведена работа по модернизации метода в направлении вычисления физически понятного показателя, характеризующего близость состояния ДТО к аварийному. Кроме того, был расширен и сам функционал метода, позволяющий теперь помимо вычисления текущего “физичного” показателя аномальности прогнозировать появление неисправности ДТО и определять признаки, характеризующие работу данного оборудования и наиболее сильно влияющие на этот показатель, и ранжировать их по степени влияния.
ПОСТАНОВКА ЗАДАЧИ
Далее приведены некоторые определения.
Под “аномальной” работой ДТО на обучающем периоде предполагаются такие временные интервалы работы оборудования, которые непосредственно предшествуют явному проявлению каких-либо неисправностей, “нормальному” периоду соответствует все остальное время его работы.
Под “аномальным” поведением ДТО в период текущей эксплуатации модели понимается такая его работа, которая существенно отличается по своим характеристикам (измеряемым и вычисляемым параметрам) от значений, имеющихся у ДТО на участках обучающего периода, признанных “нормальными”.
При всем развитии компьютерных технологий любая система предиктивной аналитики может лишь с некоторой вероятностью прогнозировать состояние технологического оборудования на определенный период. Поэтому представляется логичным иметь показатель аномальности как некую меру вероятности появления и развития неисправности в работе ДТО, которая в случае ее неустранения чревата аварией.
Для получения модели, основанной на любом математическом методе, она должна пройти этап так называемого обучения. Обучение – это, по сути, наладочный этап разработки модели, когда при установленном в ней методе прогнозирования неисправностей ДТО рассчитываются конкретные значения параметров и коэффициентов модели. При этом крайне важное значение приобретает разметка (или ее возможность) обучающего периода работы ДТО на нормальные и аномальные периоды работы.
Возможны три варианта разметки:
первый – обучающий период размечен на нормальные и аномальные интервалы работы ДТО [9, 10];
второй – имеются данные только о нормальной эксплуатации (рассматривалось в статье [1]);
третий – отсутствует информация, позволяющая с достаточной степенью достоверности осуществить разметку обучающего периода на аномальные и нормальные интервалы работы ДТО.
В результате анализа большого объема данных различного технологического оборудования было выявлено, что практически невозможно получить достоверную разметку обучающего периода по первому варианту. Второй вариант хотя и более реалистичен, но также сопряжен с большими трудностями, главная из которых – высокая вероятность потери информации при ложном исключении из обучающего периода интервалов нормальной эксплуатации ДТО, что в последующем при эксплуатации модели приведет к частым ложным детектированиям неисправностей и, как следствие, к потере доверия к ее работе. Поэтому представляет интерес развитие метода прогнозирования неисправностей до состояния, позволяющего строить модель на обучающем периоде в третьем варианте.
Обучающие периоды во втором и третьем вариантах исключают возможность идентификации конкретного типа прогнозированной неисправности. Единственно возможный вывод о состоянии ДТО в этих вариантах – “что-то пошло не так”, что само по себе немало, но, конечно, хотелось бы и в этих случаях получать информацию, облегчающую персоналу задачу определения конкретной причины нарушения нормального режима работы ДТО. Один из способов решения этой задачи – определение признаков работы ДТО (см. [1]), оказавших наибольшее влияние на рассчитанный моделью показатель аномальности.
Суммируя вышеизложенное, можно сформулировать задачи, которые должны быть решены модификацией разработанного ранее метода потенциалов:
1) сформировать показатель аномальности как некую меру вероятности появления и развития неисправности в работе ДТО;
2) обосновать возможность обучения модели на архивных данных, не позволяющих с достаточной степенью достоверности осуществить разметку обучающего периода на аномальные и нормальные интервалы работы ДТО;
3) разработать метод определения признаков работы ДТО, наиболее сильно повлиявших на рассчитанный моделью показатель аномальности.
ПОСТРОЕНИЕ МОДЕЛИ
Суть метода потенциалов, подробно изложенного в [1], заключается в следующем.
Принимается, что состояние ДТО в каждый момент времени t характеризуется точкой в m‑мерном пространстве признаков, являющихся измеряемыми и вычисленными по этим измерениям параметрами, где m – количество этих признаков. Также имеется обучающее множество точек состояний ДТО в моменты времени периода обучения, который составлен из архивных данных программно-технического комплекса (ПТК) автоматической системой управления технологическим процессом (АСУ ТП) энергоблока, взятых из интервалов времени, в которых работа ДТО признана нормальной, N – количество таких точек (моментов времени обучающего периода).
Для каждой k-й точки [$k \in \left( {1,N} \right)$] вычисляется ее средний “потенциал” относительно остальных (N – 1) точек:
Критерием аномальности режима работы ДТО в текущий момент времени t в рассматриваемой модели считается степень удаленности в меньшую сторону значения “потенциала” в текущий момент времени t, рассчитываемого по формуле
Как уже было отмечено в начале статьи, вычисляемый методом потенциала показатель аномальности имеет неочевидную интерпретацию степени близости к аварийному состоянию ДТО и неоднозначен для разных технологических режимов и видов ДТО. Поэтому следует модифицировать метод следующим образом, попутно решая и две другие задачи, поставленные в предыдущем разделе.
Имеется средний потенциал точек состояний ДТО на обучающем периоде. Пусть теперь $f\left( {\varphi _{k}^{{ср}}} \right)$ – оцененная функция плотности распределения значений средних потенциалов $\varphi _{k}^{{ср}},$ $k \in \left( {1,{{N}_{n}}} \right).$ Здесь и далее для простоты записи индекс n в обозначении количества точек (моментов времени) в обучающем интервале $\left( {{{N}_{n}} \to N} \right)$ и индекс “ср” в записи значений средних потенциалов $\left( {\varphi _{k}^{{ср}} \to {{\varphi }_{k}}} \right)$ отбрасываются. Для оценки плотностей используется метод ядерных оценок (“окно” Парзена – Розенблатта):
Вследствие удобных (по вычислению) математических свойств в качестве ядра будет использована стандартная нормальная функция плотности распределения.
Параметр h является свободным. От выбора его значения сильно зависит соответствие оцененной функции плотности распределения ее реальному виду.
В настоящее время в теории не существует однозначного метода, позволяющего осуществить оптимальный выбор ширины “окна” h по имеющейся выборке. Тем не менее, разработано большое число автоматических методов, с той или иной степенью оптимальности осуществляющих выбор h.
Можно определить вероятность нахождения ДТО в аномальном режиме работы, вычисляя в каждый текущий момент времени t средний потенциал $\varphi {\kern 1pt} {\kern 1pt} (t)$ точки относительно всех точек обучающего множества по формуле
Чем меньше $\varphi {\kern 1pt} {\kern 1pt} (t),$ тем ближе к периферии обучающего множества находится текущая точка, образованная параметрами работы ДТО в данный момент времени, и тем меньше вероятность нахождения ДТО в нормальной области (соответственно тем больше вероятность аномального режима). Имея плотность распределения потенциалов в обучающей выборке, можно оценить вероятность того, что режим работы ДТО в момент t, имеющий значение потенциала $\varphi {\kern 1pt} {\kern 1pt} (t),$ находится в нормальном режиме эксплуатации:
Соответственно, вероятность аномального режима равна
Рис. 1.
График распределения плотности потенциалов для расчета вероятности работы ДТО в аномальном режиме. Площадь под кривой распределения: 1 – $S = P\left( {\varphi > {{\varphi }_{{min}}}} \right) = 0.95;$ 2 – $S = P\left[ {\varphi > \varphi {\kern 1pt} {\kern 1pt} (t)} \right]$

При вычислении в каждый момент времени S(t) будет известна вероятность аномального режима работы ДТО.
Такой подход наряду с получением показателя аномальности в виде вероятности его наступления предоставляет возможность иметь никак не размеченный период обучения (см. предыдущий раздел, третий вариант). Единственное требование к обучающему периоду заключается в том, чтобы время эксплуатации ДТО со значимыми неисправностями внутри этого периода было существенно меньше времени эксплуатации без них, что при значительной длительности периода (год и больше) практически всегда выполняется. В связи с отмеченными ранее большими трудностями разметки обучающего периода, данное обстоятельство является серьезным достоинством модели.
Однако судить об аномальности режима только по абсолютной величине вероятности Pа представляется некорректным. Так, работа ДТО в режимах с устойчивыми значениями Pа, например около 70%, может свидетельствовать не о 70%-ной вероятности наличия аварийного режима (так можно было бы считать только при идеальном обучении модели, что на практике невозможно), а о 20%-ном отклонении режима в данный момент времени от наиболее распространенного режима в обучающей выборке. Это, вследствие неидеального обучения модели, может характеризовать режим работы ДТО как лучший по своим свойствам, но недостаточно представленный в обучающей выборке.
Поэтому определение значения вероятности Pа дополняется вычислением тенденции ее изменения. Для этого применяется подход, при котором выбирают временной интервал Δ и на периоде $\tau \in \left( {t - \Delta ,t} \right)$ для каждого текущего момента времени t с шагом s задают выборку значений ${{P}_{а}}({{\tau }_{i}}),$ ${{\tau }_{i}} = t - \Delta + i \cdot s,$ где $i = 0,1,...,\frac{\Delta }{s},$ и по данным этой выборки в каждый текущий момент времени t будет определяться коэффициент наклона k линейной регрессии t (рис. 2):
где b – свободный член линейной регрессии.Рис. 2.
График для вычисления “времени до неисправности”. 1 – kτ + b; 2 – kτ + Pа(t); 3 – Tа = [0.95 – Pа(t)]/k
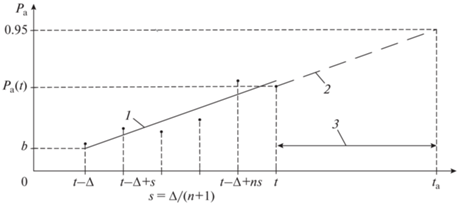
Теперь в каждый текущий момент времени t можно рассчитать условное время ${{T}_{а}}(t)$ до входа ДТО в аномальную зону функционирования (время до предполагаемой неисправности). В технических дисциплинах принято считать вероятность события P > 0.95 достаточной для принятия решения о его достоверности. В соответствии с этим предположением считается, что ДТО, рассматриваемое в данной статье, вошло в аномальную зону функционирования, если ${{P}_{а}} \geqslant 0.95.$ Тог-да
(см. поз. 3 рис. 2).Задавшись уставками Pпр (предельным значением вероятности) и Tпр (пределом прогнозируемого времени до наступления аномальности), можно выдавать сигнализацию при наличии каких-либо или всех нижеследующих условий: ${{P}_{а}}(t) > {{P}_{{пр}}}$ и ${{T}_{а}}(t) < {{T}_{{пр}}}.$
При превышении значений Pпр и/или Tпр можно запустить процедуру ранжирования вклада каждого конкретного признака в отклонение режима работы ДТО от нормального. Следует рассмотреть вопрос ранжирования более подробно.
Как было сказано ранее, признаки, характеризующие работу ДТО, нормируются. Нетрудно показать, что в случае так называемой z-нормировки
Ранжируя таким образом признаки, получают сравнительную оценку влияния каждого признака на отклонение режима работы ДТО от нормального. На этом построение модели можно считать законченным.
Параметрами модели являются:
f(φ) – оцененное на обучающем периоде значение плотности распределения потенциалов;
Δ, s – глубина и шаг выборки для расчета коэффициента наклона линейной регрессии k;
Pпр – предельное значение вероятности, при превышении которого состояние ДТО считается аномальным (уставка сигнализации);
Tпр – предельное значение прогнозного времени до возникновения аномальности, при котором выдается сигнализация (уставка сигнализации).
Выходы модели:
Pа(t) – вероятность аномального режима в текущий момент времени;
Tа(t) – время, оставшееся до вхождения ДТО в аномальный режим работы (“время до неисправности”);
ранжированный перечень “объясняющих” [наиболее влияющих на величину Pа(t)] параметров работы ДТО.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
На основе архивных данных энергоблока были построены модели для различного диагностируемого технологического оборудования этого энергоблока. Затем через модели пропускались архивные данные (входы ДТО), как если бы модель работала в режиме онлайн.
Как и следовало ожидать [1], большинство выявленных моделью дефектов имело тривиальный характер и обнаруживалось штатным ПТК (отказ датчика, выход параметра за уставки сигнализации), но имелись и значимые результаты, не проявляющиеся (во всяком случае сразу) через штатную диагностику.
Далее приведены результаты работы модели для технологической группы “Подшипники генератора”.
Модель выдала “прогнозную” сигнализацию 04.10.2017 в 19:45 (рис. 3), так как в этот момент расчетное время до предполагаемого возникновения аномалии 61 ч становится меньше уставки Tпр = 72 ч.
Рис. 3.
Прогнозирование аномальной работы на диагностируемом периоде (2017 г.). Линии: вертикальные пунктирные – границы начала и конца периода, где вероятность аномалии составляла более 95% непрерывно в течение более чем Tпр; горизонтальные пунктирные – значения вероятности аномалии 95 и 100%. 1 – значение вероятности нахождения оборудования в аномальном состоянии; 2 – аппроксимирующая прогнозная прямая; 3 – прогнозная прямая, показывающая достижение значения вероятности возникновения аномалии 95%

Затем 05.10.2017 в 12:05, через 48 ч (уставка модели) после вхождения вероятности в зону значений, превышающих Pпр = 95%, пришла сигнализация о вероятной неисправности в работе ДТО.
Анализ поведения технологических параметров технологической группы “Подшипник генератора” на исследуемом периоде показал, что все они по отдельности не выходят за установленные пределы и не отличаются значимым образом от их средних значений, вычисленных на обучающих периодах. Однако их совокупность оказалась необычной (аномальной) для модели, которая оценивает, насколько данный технологический режим отличается от обычного, т.е. наиболее присущего работе оборудования.
Эту ситуацию иллюстрирует рис. 4, на котором для примера (на самом деле такой график будет представителен для данной группы оборудования только в девятимерном пространстве, образованном координатами, представляющими собой все описывающие данную технологическую группу параметры) показано состояние ДТО в двухмерном пространстве, образованном координатами “осевая вибрация подшипника генератора” и “температура баббита подшипника генератора” с точками, характеризующими состояние ДТО в обучающем периоде (на рисунке это “точки”), и их состояниями в выявленной моделью зоне аномальности в период с 05.10.2017 в 12:05 по 09.10.2017 в 13:50 (на рисунке показано “плюсами”). Пунктирами показаны границы “нормальных” значений этих двух параметров. Как видно на рисунке, плюсы хотя и лежат внутри прямоугольника из пунктирных линий (т.е. каждый параметр в отдельности не выходит за пределы “нормы”), но в совокупности они занимают зону, существенно отличающуюся от обычной для данного оборудования.
Рис. 4.
Иллюстрация диагностирования аномальности (ось ординат – температура MKD01CT001, ось абсцисс – вибрация MKD01CY003A). 1 – границы параметров на обучающем периоде; 2 – состояние оборудования в обучающем периоде; 3 – состояние оборудования в зоне выявленной аномалии

Рассмотренный пример показывает ситуацию, когда модель обнаруживает наличие “аномальности” в работе ДТО, не регистрируемой штатными средствами традиционного ПТК.
ВЫВОДЫ
1. Разработанный ООО “Инконтрол” метод позволяет с определенной вероятностью предсказать и диагностировать нахождение оборудования в неисправном состоянии, а также получить ранжированный перечень влияющих параметров, который дает возможность технологу конкретизировать место и вид неисправности.
2. Предложенная методика является инструментом выявления отклонения совокупности параметров ДТО от их типичных значений.
3. Точность и чувствительность выявления аномалий обеспечиваются точностью обучения модели.
4. Проведенные испытания метода на имеющихся архивных данных состояния оборудования различных энергоблоков показали работоспособность модели, которая помимо вполне ожидаемых тривиальных дефектов, диагностируемых штатной системой сигнализации установленных на этих энергоблоках ПТК, смогла выявить нетривиальные аномальные состояния, штатной системой принципиально не обнаруживаемые.
5. Вероятностная природа метода и практически всегда имеющаяся неполнота исходных данных не гарантируют, что каждое предсказание/диагностирование неисправности указывает на непременное наличие неисправности в работе диагностируемого оборудования. Поэтому предполагается, что вслед за инициируемой моделью сигнализации об обнаружении аномальности должен следовать технологический анализ, проводимый специалистом-технологом. Следует отметить, что это замечание справедливо для всех возможных методов предиктивной аналитики.
Список литературы
Коршикова А.А., Идзон О.М. Модель раннего обнаружения аварийных ситуаций на оборудовании электростанций на основе метода наименьших потенциалов // Теплоэнергетика. 2021. № 10. С. 37–44. https://doi.org/10.1134/S0040363621090034
Немирович-Скрабатун Д.Н., Персяев А.А. Опыт создания системы автоматического распознавания аномалий в работе энергетического оборудования // Электрические станции. 2022. № 1 (1086). С. 49–56.
Система прогностики и удаленного мониторинга. [Электрон. ресурс.] https://prana-system.com/
AI-Based Process Analysis and Optimization with SiePA. [Электрон. ресурс.] https://ingenuity.siemens.com/ 2022/02/ai-based-process-analysis-and-optimization- with-siepa/
MindSphere. Сайт компании Siemens. [Электрон. ресурс.] http://siemens.mindsphere.io/en
Predix Platform. Сайт компании GE Digital. [Электрон. ресурс.] https://www.ge.com/digital/iiot-platform
SmartSignal Analytics. Сайт компании GE Digital. [Электрон. ресурс.] https://www.ge.com/digital/ a-pplications/asset-performance-management-apm/ smartsignal
Использование платформы PRISM для мониторинга и диагностики / Predective Asset Analytics. Сайт “Wonderware”. [Электрон. ресурс.] https:// wonderware.ru/asset-performance-management/asset-analysis/predictive-asset-analytics/predictive-asset-analytics-usage/
Коршикова А.А., Трофимов А.Г. Модель раннего обнаружения аварийных ситуаций на оборудовании электростанций на основе методов машинного обучения // Теплоэнергетика. 2019. № 3. С. 49–56. https://doi.org/10.1134/S0040363619030044
Korshikova A.A., Trofimov A.G. Predictive model for calculating abnormal functioning power equipment // Studles in Systems, Decision and Control (SSDC). 2020. V. 260. P. 249–259. https://doi.org/10.1007/978-3-030-32648-7_20
Дополнительные материалы отсутствуют.
Инструменты
Теплоэнергетика