

Журнал вычислительной математики и математической физики, 2022, T. 62, № 7, стр. 1158-1179
Стационарные и осциллирующие решения уравнений ионизации
М. Б. Гавриков 1, *, А. А. Таюрский 1, 2, **
1 ИПМ им. М.В. Келдыша РАН
125047 Москва, Миусская пл., 4, Россия
2 МГТУ им. Н.Э. Баумана
105005 Москва, ул. 2-я Бауманская, 5, стр. 1, Россия
* E-mail: mbgavrikov@yandex.ru
** E-mail: tayurskiy2001@mail.ru
Поступила в редакцию 13.01.2022
После доработки 13.01.2022
Принята к публикации 11.03.2022
- EDN: LJEPQX
- DOI: 10.31857/S0044466922070043
Аннотация
В работе решен ряд математических задач теории ионизации применительно к процессам в стационарных плазменных двигателях. Рассмотрены две основные математические модели ионизации – гидродинамическая и кинетическая. В центре внимания находится вопрос о существовании ионизационных колебаний (бривинг-мод). На базе одномерной гидродинамической модели решена краевая задача для стационарных уравнений ионизации. Доказаны ее однозначная разрешимость и отсутствие бривинг-мод в случае знакоопределенных скоростей атомов и ионов. В практически важном случае, когда в области течения ионная скорость имеет единственный нуль с положительной производной, доказано, что стационарная краевая задача имеет счетное число решений, и сформулировано необходимое и достаточное условие существования бривинг-мод. Предложен численный алгоритм исследования бривинг-мод. Дано аналитическое решение уравнений ионизации в случае постоянных скоростей атомов и ионов, а полученные формулы применены к аналитическому решению задачи Коши, краевой и смешанной задач в простейших областях. В случае одномерной кинетической модели ионизации численно показано существование бривинг-мод и проведен краткий анализ полученных результатов. Библ. 18. Фиг. 5.
1. ВВЕДЕНИЕ
Ниже рассматриваются математические задачи, связанные с ионизацией плазмы, применительно к процессам, происходящим в стационарных плазменных двигателях (СПД). СПД были предложены А.И. Морозовым и с 1971 г. успешно и безальтернативно используются для коррекции орбит космических летательных аппаратов. История вопроса изложена в [1]–[4].
Экспериментально фиксируется принципиально важный эффект низкочастотных (10–30 кГц) колебаний разрядного тока в камере СПД. С практической точки зрения этот эффект носит паразитический характер, а механизм указанных осцилляций неясен, но вероятной причиной, предположительно, являются возможные колебания концентраций атомов (${{n}_{a}}$) и ионов ксенона (${{n}_{i}}$) в СПД при ионизации. С другой стороны, особый интерес представляют стационарные течения плазмы в СПД. Целью работы являются, во-первых, нахождение стационарных решений нелинейных уравнений одномерной ионизации и, во-вторых, анализ причин появления периодических колебаний концентраций ${{n}_{i}}$, ${{n}_{a}}$, подчиняющихся системе
(1)
$\partial {{n}_{a}}{\text{/}}\partial t + \partial ({{n}_{a}}{{v}_{a}}){\text{/}}\partial z = - \beta {{n}_{a}}{{n}_{i}},\quad \partial {{n}_{i}}{\text{/}}\partial t + \partial ({{n}_{i}}{{v}_{i}}){\text{/}}\partial z = \beta {{n}_{a}}{{n}_{i}},\quad 0 \leqslant z \leqslant L,\quad t \geqslant 0,$(2)
$d{{N}_{1}}{\text{/}}dt = - {{\gamma }_{1}}{{N}_{1}}{{N}_{2}} + {{\mu }_{1}}{{N}_{1}},\quad d{{N}_{2}}{\text{/}}dt = {{\gamma }_{2}}{{N}_{1}}{{N}_{2}} - {{\mu }_{2}}{{N}_{2}},\quad {{\gamma }_{1}},{{\gamma }_{2}},{{\mu }_{1}},{{\mu }_{2}} > 0.$Проведенное ниже исследование показывает, что существование ионизационных колебаний (бривинг-мод) в СПД обусловлено фундаментальными математическими свойствами системы (1) и скорее всего никак не связано с феноменологической моделью Лотки–Вольтерра.
Как показывают численные расчеты, в случае знакоопределенных скоростей ${{v}_{a}}(z)$, ${{v}_{i}}(z)$ решение начально-краевой задачи для системы (1) со стационарными граничными условиями при $t \to + \infty $ выходит на установление, стремясь, как и следовало ожидать, к стационарному состоянию, определяемому системой (1). Как следствие, в этом случае бривинг-моды отсутствуют. Стационарные решения системы (1) играют особую роль, поскольку они определяют установившиеся режимы работы СПД. В разд. 2 проведено интегрирование в квадратурах стационарных уравнений (1). Показано, что краевая задача для стационарной системы (1) в случае знакоопределенных скоростей ${{v}_{a}}(z)$, ${{v}_{i}}(z)$ всегда имеет, и притом единственное, решение. В случае знакопеременных скоростей ситуация кардинально меняется. Ограничиваясь физически важным случаем ${{v}_{a}}(z) > 0$, $z \in [0,L]$ (чаще всего считается ${{v}_{a}}(z) \equiv {{v}_{a}} > 0$), установлено, что краевая задача для стационарной системы (1) имеет счетное число решений, если ${{v}_{i}}(z)$ принадлежит классу знакопеременных функций, имеющих единственный нуль ${{z}_{0}} \in (0,L)$, для которого $v_{i}^{'}({{z}_{0}}) > 0$. Скорость ${{v}_{i}}(z)$ из указанного класса функций особенно актуальна для анализа процессов в СПД. Экспериментально [13] показано, что в камере СПД всегда возникает двумерная прианодная зона, в которой продольная ионная скорость отрицательна, а вне этой зоны – положительна. Применительно к одномерной модели приходим к скорости ${{v}_{i}}(z)$ указанного выше типа. В частности, для таких скоростей ${{v}_{i}}(z)$, как показывают расчеты, могут существовать бривинг-моды. Более того, стационарные решения для скоростей ${{v}_{i}}(z)$, не входящих в указанный выше класс, отсутствуют.
В разд. 3 в случае ${{v}_{a}} = {\text{const}}$, ${{v}_{i}} = {\text{const}}$ нелинейная система (1) решается аналитически. Полученные интегральные аналитические выражения для неизвестных ${{n}_{a}}$, ${{n}_{i}}$ позволяют решить аналитически задачу Коши в полуплоскости $t \geqslant 0$ и простейшие краевые (в полуплоскости $z \geqslant 0$) и смешанные (в первом квадранте $t \geqslant 0$, $z \geqslant 0$) задачи для этой системы. Методы, развитые в этом разделе, позволяют решать и другие начально-краевые задачи для системы (1) в случае постоянных скоростей ${{v}_{a}}$, ${{v}_{i}}$. Из выведенных в разд. 3 формул для решения системы (1), в частности, следует отсутствие бривинг-мод в случае ${{v}_{a}} = {\text{const}}$, ${{v}_{i}} = {\text{const}}$.
В разд. 4 для случая ${{v}_{a}} = {\text{const}} > {\text{0}}$ и знакопеременных скоростей ${{v}_{i}}(z)$, имеющих единственный нуль ${{z}_{0}} \in (0,L)$, для которого $v_{i}^{'}({{z}_{0}}) > 0$, обсуждается причина возникновения ионизационных колебаний (бривинг-мод) при решении системы (1). В этом случае прямая $z = {{z}_{0}}$ является характеристикой системы (1), а необходимое и достаточное условие существования бривинг-мод состоит в периодичности значений функций ${{n}_{i}}$, ${{n}_{a}}$ на указанной характеристике, ${{n}_{i}}(t) = {{n}_{i}}(t,{{z}_{0}})$, ${{n}_{a}}(t) = {{n}_{a}}(t,{{z}_{0}})$ при $t \to + \infty $. В разд. 4 выведено ОДУ, которому удовлетворяет функция ${{n}_{i}}(t)$, совпадающее с условием разрешимости [14] для квазилинейных систем уравнений в частных производных, и указана процедура нахождения функции ${{n}_{a}}(t)$. Оказывается, значения ${{n}_{i}}$, ${{n}_{a}}$ на характеристике $z = {{z}_{0}}$ подчиняются системе ОДУ более сложной, чем уравнение Лотки–Вольтерра. Сами функции ${{n}_{i}}(t)$, ${{n}_{a}}(t)$ находятся численным решением уравнений ионизации (1) посредством предложенной в работе разностной схемы. Аналитическое исследование существования и свойств функций ${{n}_{i}}(t)$, ${{n}_{a}}(t)$ выходит за рамки настоящей работы.
Недостаток модели ионизации (1) в том, что скорость ионов ${{{v}}_{i}}$ стационарная и задается, а не ищется из уравнения движения ионов. Поэтому справедливость выводов, которые делаются на основе анализа решений системы (1) (в том числе о наличии ионизационных колебаний), в значительной степени зависит от того, насколько правильно выбрана скорость ${{v}_{i}}$. Скорость ионов, определяемая из уравнения движения ионов, вообще говоря, зависит от времени, ${{v}_{i}} = {{v}_{i}}(t,z)$, что не учитывается в системе (1). Поэтому в разд. 5 существование ионизационных колебаний устанавливается на базе численного исследования посредством метода макрочастиц значительно более точной модели ионизации, состоящей из кинетического уравнения для ионов, двигающихся в заданном постоянном и однородном электромагнитном поле в СПД, и уравнения переноса атомов ксенона с учетом ионизации. При этом индукционные электромагнитные поля, порождаемые плазменными токами в СПД, и рассеяние электронов и ионов на боковых стенках камеры считаются пренебрежимо малыми.
2. СТАЦИОНАРНЫЕ РЕШЕНИЯ УРАВНЕНИЙ ИОНИЗАЦИИ
Ниже ограничимся исключительно важным случаем ${{v}_{a}}(z) > 0$ и даже еще более жестким ограничением ${{v}_{a}} = {\text{const}} > 0$.
В случае $\partial {\text{/}}\partial t = 0$ система уравнений ионизации принимает вид:
(3)
$d({{n}_{a}}{{v}_{a}}){\text{/}}dz = - \beta {{n}_{i}}{{n}_{a}},\quad d({{n}_{i}}{{v}_{i}}){\text{/}}dz = \beta {{n}_{i}}{{n}_{a}},\quad z \geqslant 0.$(6)
$\int {\frac{{du}}{{(C - u)u}}} = \int {\frac{{\beta dz}}{{{{v}_{i}}(z){{v}_{a}}(z)}}} \;\;\mathop \Rightarrow \limits_{C \ne 0} \;\;\frac{1}{C}\ln \left| {\frac{u}{{C - u}}} \right| = \int {\frac{{\beta dz}}{{{{v}_{i}}(z){{v}_{a}}(z)}}} .$Допустим на $[0,L]$ скорости ${{v}_{a}}(z)$, ${{v}_{i}}(z)$ знакопостоянные. Тогда из (6) следует
(8)
$\begin{gathered} u(z) = CD{{e}^{{F(z)}}}{{[1 + D{{e}^{{F(z)}}}]}^{{ - 1}}},\quad {{n}_{i}}(z) = CD{{e}^{{F(z)}}}v_{i}^{{ - 1}}(z){{[1 + D{{e}^{{F(z)}}}]}^{{ - 1}}}, \\ {{n}_{a}}(z) = Cv_{a}^{{ - 1}}{{[1 + D{{e}^{{F(z)}}}]}^{{ - 1}}},\quad F(z) = C\beta \int\limits_0^z {v_{i}^{{ - 1}}(z)v_{a}^{{ - 1}}(z)dz} , \\ \end{gathered} $Если ${{v}_{i}}(z) > 0$ на $[0,L]$, то из (4) следует $C > 0$ и для неособого решения $D > 0$. Из (4) следует $C = {{n}_{{a0}}}{{v}_{a}}(0) + {{n}_{{i0}}}{{v}_{i}}(0)$, тогда из (8) выводим
Если ${{v}_{i}}(z) < 0$ на $[0,L]$, то исследование разрешимости краевой задачи для системы (3) более громоздкое. Краевые условия, согласно (8), дают следующее:
(9)
$f(C)\mathop = \limits_{{\text{def}}} \exp [ - C\beta {{F}_{0}}(L)] = {{k}_{a}}{{k}_{i}}{{({{k}_{a}} - C)}^{{ - 1}}}{{({{k}_{i}} + C)}^{{ - 1}}}\mathop = \limits_{{\text{def}}} g(C).$Численное решение начально-краевой задачи для системы (1) по разностной схеме, предлагаемой ниже, со стационарными краевыми условиями в случае знакопостоянных ${{{v}}_{a}}(z)$, ${{{v}}_{i}}(z)$ показывает, что ее решение при $t \to + \infty $ сходится к стационарному решению системы (1), в частности, осцилляции концентраций ${{n}_{i}}$, ${{n}_{a}}$ (бривинг-моды) отсутствуют.
Рассмотрим теперь случай знакопеременных ионных скоростей ${{{v}}_{i}}(z)$ на типичном примере ${{{v}}_{i}}(z) = \alpha (z - {{z}_{0}})$, ${{z}_{0}} \in (0,L)$, $\alpha > 0$. Тогда ${{v}_{i}}({{z}_{0}}) = 0$, $\alpha = v_{i}^{'}({{z}_{0}}) > 0$. Будем искать только такие стационарные решения, для которых ${{n}_{i}}(z)$ не обращается тождественно в нуль ни на каком интервале, лежащем в $[0,L]$ (если это не так, то ${{n}_{i}}(z) \equiv 0$ на некотором интервале $[0,L]$ и, значит, на этом интервале процесс ионизации прекратился, что противоречит экспериментальным данным по СПД). Из первого интеграла (4), вычисленного в точке ${{z}_{0}}$, следует, что $C \geqslant 0$. Случай $C = 0$ приводит к физически абсурдным решениям (см. ниже). Поэтому считаем $C > 0$. Тогда стационарное решение вычисляется по формулам (6), примененным отдельно к полуинтервалам $[0,{{z}_{0}})$ и $({{z}_{0}},L]$, и имеет вид
(10)
${{n}_{i}}(z) = \frac{{C{{D}_{ \pm }}{{{\left| {z - {{z}_{0}}} \right|}}^{\zeta }}}}{{\alpha (z - {{z}_{0}})(1 + {{D}_{ \pm }}{{{\left| {z - {{z}_{0}}} \right|}}^{\zeta }})}},\quad {{n}_{a}}(z) = \frac{{C{\text{/}}{{v}_{a}}}}{{1 + {{D}_{ \pm }}{{{\left| {z - {{z}_{0}}} \right|}}^{\zeta }}}},\quad \zeta = \frac{{C\beta }}{{\alpha {{v}_{a}}}},$Проведем следующее рассуждение. Пусть ${{n}_{i}}(z)$ бесконечно дифференцируема в окрестности ${{z}_{0}}$ и не все производные ${{n}_{i}}$ в точке ${{z}_{0}}$ обращаются в нуль. Пусть $k \geqslant 0$ – наименьшее целое, для которого $n_{i}^{{(k)}}({{z}_{0}}) \ne 0$. Поскольку ${{n}_{i}} \geqslant 0$ всюду в $[0,L]$, то с помощью формулы Тейлора (см. ниже) нетрудно показать, что $k$ – четное. Пусть $k = 2\ell $, $\ell \geqslant 0$. По формуле Тейлора с остаточным членом в форме Пеано имеем
(11)
$\begin{gathered} {{n}_{i}}(z) = \frac{{n_{i}^{{(2\ell )}}({{z}_{0}})}}{{(2\ell )!}}{{(z - {{z}_{0}})}^{{2\ell }}} + r(z),\quad {{n}_{a}}(z) = {{n}_{a}}({{z}_{0}}) + n_{a}^{'}({{z}_{0}})(z - {{z}_{0}}) + R(z), \\ r(x) = o({{(z - {{z}_{0}})}^{{2\ell }}}),\quad R = o(z - {{z}_{0}}),\quad z \to {{z}_{0}}. \\ \end{gathered} $Выражение справа равно
(12)
$z < {{z}_{0}}\,:\;\;{{n}_{i}}(z) = - \frac{{C{{D}_{ - }}}}{\alpha }\frac{{{{{(z - {{z}_{0}})}}^{{2\ell }}}}}{{1 + {{D}_{ - }}{{{\left| {z - {{z}_{0}}} \right|}}^{{2\ell + 1}}}}},\quad z > {{z}_{0}}\,:\;\;{{n}_{i}}(z) = \frac{{C{{D}_{ + }}}}{\alpha }\frac{{{{{(z - {{z}_{0}})}}^{{2\ell }}}}}{{1 + {{D}_{ + }}{{{\left| {z - {{z}_{0}}} \right|}}^{{2\ell + 1}}}}}.$(13)
$\begin{gathered} {{n}_{i}}(z) = \frac{{CD{{{(z - {{z}_{0}})}}^{{2\ell }}}}}{{\alpha (1 + D{{{(z - {{z}_{0}})}}^{{2\ell + 1}}})}},\quad {{n}_{a}}(z) = \frac{{C{\text{/}}{{v}_{a}}}}{{1 + D{{{(z - {{z}_{0}})}}^{{2\ell + 1}}}}},\quad \ell = 0,1,2, \ldots ,\quad z \in [0,L], \\ C = \alpha {{v}_{a}}(2\ell + 1){\text{/}}\beta ,\quad D = (1 - C{\text{/}}({{n}_{{a0}}}{{v}_{a}})){\text{/}}z_{0}^{{2\ell + 1}}. \\ \end{gathered} $Итак, установлено, что краевая задача для стационарной системы (1) в случае ${{v}_{a}} = {\text{const}} > {\text{0}}$, ${{v}_{i}}(z) = \alpha (z - {{z}_{0}})$, $\alpha > 0$, ${{z}_{0}} \in (0,L)$, имеет на отрезке $[0,L]$ счетное число решений, задаваемых формулой (13). Если ${{n}_{i}}(z)$ аналитична в окрестности ${{z}_{0}}$, то, очевидно, других решений указанная краевая задача не имеет, и в этом случае формула (13) дает общий вид решений краевой задачи для стационарной системы (1). Наконец, в случае $C = 0$ стационарное решение системы (1) задается формулой (7) применительно к каждому полуинтервалу $[0,{{z}_{0}})$, $({{z}_{0}},L]$:
Предложенный способ построения решений краевых задач пригоден для любой функции ${{v}_{i}}(z)$, имеющей единственный нуль ${{z}_{0}}$ на $[0,L]$, причем $0 < {{z}_{0}} < L$ и $v_{i}^{'}({{z}_{0}}) > 0$. Приведем два примера.
Пример 1. Пусть ${{v}_{i}}(z) = a(z + {{z}_{1}})(z - {{z}_{0}})$, ${{z}_{1}} > 0$, $0 < {{z}_{0}} < L$, $a > 0$. Тогда $\alpha = v_{i}^{'}({{z}_{0}}) = a({{z}_{0}} + {{z}_{1}}) > 0$. Действуя по схеме, предложенной выше, получаем счетное число решений краевой задачи для (3) с граничным условием ${{n}_{a}}(0) = {{n}_{{a0}}} > 0$:
Пример 2. Пусть ${{v}_{i}}(z) = - \cos (\pi z{\text{/}}L)$, ${{z}_{0}} = L{\text{/}}2$ – единственный нуль на $[0,L]$, $v_{i}^{'}({{z}_{0}}) = $ $ = \pi {\text{/}}L\mathop = \limits_{{\text{def}}} \alpha > 0$. Действуя по схеме, предложенной выше, получаем счетное число решений краевой задачи для (3) с граничным условием ${{n}_{a}}(0) = {{n}_{{a0}}} > 0$:
Интегральное тождество, из которого выводились выше значения констант $C$, ${{D}_{ \pm }}$, имеет простой смысл – это баланс количества ионов, возникающих на отрезке $[{{z}_{0}} - \varepsilon ,{{z}_{0}} + \varepsilon ]$ вследствие ионизации и за счет переноса ионов со скоростью ${{v}_{i}}$ через границы отрезка. Основная идея подсчета констант заключалась в том, чтобы найти асимптотики обоих количеств при $\varepsilon \to 0$ ($ \equiv $ главные члены разложений по $\varepsilon $ обеих частей интегрального тождества) и приравнять их. Этот прием позволяет получать и другие неочевидные результаты. Например, если ${{v}_{i}}(z)$ обращается в нуль в некоторой точке ${{z}_{0}} \in (0,L)$, в окрестности которой ${{n}_{i}}$ аналитична и для которой $\alpha = v_{i}^{'}(z) < 0$, то стационарная система (3) не имеет решений. Действительно, для такого решения, повторяя рассуждения выше, получаем равенство ${{n}_{a}}({{z}_{0}}) = \alpha (2\ell + 1){\text{/}}\beta $ для некоторого целого $\ell \geqslant 0$, из которого вытекает неравенство ${{n}_{a}}({{z}_{0}}) < 0$, что физически абсурдно. Другой пример дает функция ${{v}_{i}}(z)$, которая на отрезке $[0,L]$ имеет единственный нуль ${{z}_{0}} \in (0,L)$ и выполнено условие $v_{i}^{'}({{z}_{0}}) = 0$. Тогда система (3) решений не имеет. Действительно, повторяя рассуждения выше применительно к интегральному тождеству, получаем ${{n}_{a}}({{z}_{0}}) = 0$, и, значит, константа $C$ в первом интеграле (4) равна нулю. С другой стороны, функция ${{n}_{a}}(z)$ монотонно невозрастающая на $[0,L]$ и неотрицательная, поэтому ${{n}_{a}}(z) \equiv 0$, $z \in [{{z}_{0}},L]$, но тогда из интеграла (4) с учетом $C = 0$ и знакоопределенности ${{v}_{i}}(z)$ на $({{z}_{0}},L]$ следует, что и ${{n}_{i}}(z) \equiv 0$, $z \in [{{z}_{0}},L]$, что физически абсурдно. Добавим, если вычислить ${{n}_{i}}$ на $[0,{{z}_{0}})$ посредством формулы (7), то нетрудно убедиться в разрывности функции ${{n}_{i}}$ в точке ${{z}_{0}}$ и логарифмической расходимости интеграла от ${{n}_{i}}(z)$ по отрезку $[0,L]$, что противоречит физическому смыслу концентрации ионов. Обобщая предыдущие примеры, приходим к физически важному выводу, что граничная задача для системы (3) имеет решение только если скорость ${{v}_{i}}(z)$ обладает единственным нулем ${{z}_{0}} \in (0,L)$, для которого $\alpha = v_{i}^{'}({{z}_{0}}) > 0$. В этом случае при определенном соотношении $\beta $ и $\alpha $ возникают ионизационные колебания (бривинг-моды).
Для численного решения перепишем систему (1) в безразмерном виде, взяв за характерные масштабы длины ${{L}_{0}} = 1$ см, скорости ${{v}_{0}} = 1.5 \times {{10}^{5}}$ см/с, времени ${{t}_{0}} = {{L}_{0}}{\text{/}}{{v}_{0}} = 0.66 \times {{10}^{{ - 5}}}$ с, концентрации ${{n}_{0}} = {{10}^{{12}}}$ см–3, $\beta = {{10}^{{ - 8}}}$ см3/с. Тогда система (1) относительно безразмерных значений всех величин перепишется в виде:
(14)
$\partial {{n}_{a}}{\text{/}}\partial t + \partial ({{n}_{a}}{{v}_{a}}){\text{/}}\partial z = - {{k}_{I}}{{n}_{a}}{{n}_{i}},\quad \partial {{n}_{i}}{\text{/}}\partial t + \partial ({{n}_{i}}{{v}_{i}}){\text{/}}\partial z = {{k}_{I}}{{n}_{a}}{{n}_{i}},$Рассмотрим типичный пример расчета бривинг-мод по дивергентной разностной схеме “разности против потока” [15] на равномерной сетке на отрезке [0, L]:
(15)
$\begin{gathered} \frac{{n_{{a,k}}^{1} - n_{{a,k}}^{0}}}{\tau } + {{v}_{a}}\frac{{n_{{a,k}}^{0} - n_{{a,k - 1}}^{0}}}{h} + {{k}_{I}}n_{{a,k}}^{1}n_{{i,k}}^{0} = 0,\quad 0 < k \leqslant N,\quad n_{{a,0}}^{1} = {{n}_{{a0}}}, \\ \frac{{n_{{i,k}}^{1} - n_{{i,k}}^{0}}}{\tau } + \frac{1}{h}\left[ {\frac{{{{v}_{{i,k + 1/2}}} - \left| {{{v}_{{i,k + 1/2}}}} \right|}}{2}n_{{i,k + 1}}^{0} + \left( {\frac{{{{v}_{{i,k + 1/2}}} + \left| {{{v}_{{i,k + 1/2}}}} \right|}}{2} - \frac{{{{v}_{{i,k - 1/2}}} - \left| {{{v}_{{i,k - 1/2}}}} \right|}}{2}} \right)n_{{i,k}}^{0} - } \right. \\ \,\left. { - \frac{{{{v}_{{i,k - 1/2}}} + \left| {{{v}_{{i,k - 1/2}}}} \right|}}{2}n_{{i,k - 1}}^{0}} \right] - {{k}_{I}}n_{{i,k}}^{0}n_{{a,k}}^{0} = 0, \\ \end{gathered} $Рассмотрим результаты расчета по схеме (15) , представленные на фиг. 1, для ${{v}_{i}}(z) = \alpha (z - {{z}_{0}})$. Фиг. 1 демонстрирует возникновение периодических колебаний концентраций ${{n}_{a}}$, ${{n}_{i}}$ (бривинг-мод) с размерной частотой ~20 кГц. Эти колебания возникают не при всех ${{k}_{I}} > 0$, $\alpha > 0$. Очевидно, на плоскости ${{k}_{I}} > 0$, $\alpha > 0$ существует некоторая неизвестная нам область, для $({{k}_{I}},\alpha )$ из которой возникают бривинг-моды. Для $({{k}_{I}},\alpha )$, не попавших в указанную область, счет по схеме (15) приводит к установлению решения. Вероятно, появление бривинг-мод связано с неединственностью решения краевой задачи для системы (3), установленной выше. Решение начально-краевой задачи для системы (1) может при $t \to + \infty $ сходиться к одному из счетного числа стационарных состояний, задаваемых формулами (13), но может, как показывают расчеты, при $t \to + \infty $ выходить на периодический режим (фиг. 1), не притягиваясь ни к одному из стационарных состояний. Логически возможен также хаотический характер решения начально-кравевой задачи для системы (1) при $t \to + \infty $, но в расчетах он зафиксирован не был. Математическая причина возникновения бривинг-мод будет разъяснена в разд. 3.
Фиг. 1.
Эволюция концентраций ионов (${{n}_{i}}$) и атомов (${{n}_{a}}$) в пространстве (z) и времени (t) для безразмерных значений параметров $L = 3$, ${{z}_{0}} = 1$, $\alpha = 1$, ${{k}_{I}} = 5$, ${{v}_{a}} = 0.1$ с начальными и граничными значениями ${{n}_{{a0}}} = 1$, $n_{a}^{0}(z) = {{n}_{{a0}}}{\text{/}}(1 + 50z)$, $n_{i}^{0}(z) = 0.1$.

3. РЕШЕНИЕ УРАВНЕНИЙ ИОНИЗАЦИИ В СЛУЧАЕ ПОСТОЯННЫХ СКОРОСТЕЙ
Решим систему (1) в случае ${{v}_{a}} = {\text{const}}$, ${{v}_{i}} = {\text{const}}$. В безразмерном виде она является частным случаем системы (14):
(16)
$\partial {{n}_{a}}{\text{/}}\partial t + {{v}_{a}}\partial {{n}_{a}}{\text{/}}\partial z = - {{k}_{I}}{{n}_{a}}{{n}_{i}},\quad \partial {{n}_{i}}{\text{/}}\partial t + {{v}_{i}}\partial {{n}_{i}}{\text{/}}\partial z = {{k}_{I}}{{n}_{a}}{{n}_{i}}.$(17)
$t = \alpha + \beta ,\quad z = \alpha {{v}_{a}} + \beta {{v}_{i}},\quad \alpha = (t{{v}_{i}} - z){{({{v}_{i}} - {{v}_{a}})}^{{ - 1}}},\quad \beta = (z - t{{v}_{a}}){{({{v}_{i}} - {{v}_{a}})}^{{ - 1}}},\quad (\alpha ,\beta ) = \varphi (t,z).$(18)
$\partial {{n}_{a}}{\text{/}}\partial \alpha = - {{k}_{I}}{{n}_{a}}{{n}_{i}},\quad \partial {{n}_{i}}{\text{/}}\partial \beta = {{k}_{I}}{{n}_{a}}{{n}_{i}}.$Теорема 1. 1) Пусть $A(\alpha )$, $B(\beta )$ – дважды непрерывно дифференцируемые функции на отрезках $[{{\alpha }_{0}},{{\alpha }_{1}}]$, $[{{\beta }_{0}},{{\beta }_{1}}]$, соответственно, причем $A(\alpha ) \ne B(\beta )$ для любых $\alpha \in [{{\alpha }_{0}},{{\alpha }_{1}}]$, $\beta \in [{{\beta }_{0}},{{\beta }_{1}}]$. Тогда функции
(19)
${{n}_{a}}(\alpha ,\beta )\mathop = \limits_{{\text{def}}} \frac{{B{\kern 1pt} '(\beta )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}},\quad {{n}_{i}}(\alpha ,\beta )\mathop = \limits_{{\text{def}}} \frac{{A{\kern 1pt} '(\alpha )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}}$2) Если непрерывно дифференцируемые решения ${{n}_{a}}$, ${{n}_{i}}$ системы (18) таковы, что множество нулей каждой из этих функций в $\Pi $ имеет пустую внутренность и $\bar {A}(\alpha )$, $\bar {B}(\beta )$ еще один комплект функций на $[{{\alpha }_{0}},{{\alpha }_{1}}]$, $[{{\beta }_{0}},{{\beta }_{1}}]$, соответственно, удовлетворяющий условиям части 1) теоремы и восстанавливающий по формулам (19) те же самые функции ${{n}_{a}}$, ${{n}_{i}}$ в $\Pi $, то найдутся константы $R \ne 0$, $C$, для которых:
(20)
$\bar {A}(\alpha ) = RA(\alpha ) + C,\quad \alpha \in [{{\alpha }_{0}},{{\alpha }_{1}}],\quad \bar {B}(\beta ) = RB(\beta ) + C,\quad \beta \in [{{\beta }_{0}},{{\beta }_{1}}].$3) В условиях части 1) теоремы функции ${{n}_{a}}$, ${{n}_{i}}$, вычисляемые по формулам (19), удовлетворяют всюду в $\Pi $ неравенствам ${{n}_{a}} \geqslant 0$, ${{n}_{i}} \geqslant 0$ тогда и только тогда, когда либо $A(\alpha )$, $B(\beta )$ монотонно не убывают на $[{{\alpha }_{0}},{{\alpha }_{1}}]$, $[{{\beta }_{0}},{{\beta }_{1}}]$, соответственно, и $\mathop {\inf }\limits_{\alpha \in [{{\alpha }_{0}},{{\alpha }_{1}}]} A(\alpha ) > \mathop {\sup }\limits_{\beta \in [{{\beta }_{0}},{{\beta }_{1}}]} B(\beta )$ ($ \equiv {\kern 1pt} A({{\alpha }_{0}}) > B({{\beta }_{1}})$), либо $A(\alpha )$, $B(\beta )$ монотонно не возрастают соответственно на $[{{\alpha }_{0}},{{\alpha }_{1}}]$, $[{{\beta }_{0}},{{\beta }_{1}}]$ и $\mathop {\sup }\limits_{\alpha \in [{{\alpha }_{0}},{{\alpha }_{1}}]} A(\alpha ) < \mathop {\inf }\limits_{\beta \in [{{\beta }_{0}},{{\beta }_{1}}]} B(\beta )$ ($ \equiv {\kern 1pt} A({{\alpha }_{0}}) < B({{\beta }_{1}})$).
Если $A(\alpha )$, $B(\beta )$ удовлетворяют условиям части 1) теоремы 1, то ${{n}_{a}}$, ${{n}_{i}}$, вычисляемые по формулам (19), непрерывно дифференцируемы в $\Pi $ и существуют непрерывные в $\Pi $ смешанные производные ${{\partial }^{2}}{{n}_{a}}{\text{/}}(\partial \alpha \partial \beta )$, ${{\partial }^{2}}{{n}_{a}}{\text{/}}(\partial \beta \partial \alpha )$ и ${{\partial }^{2}}{{n}_{i}}{\text{/}}(\partial \alpha \partial \beta )$, ${{\partial }^{2}}{{n}_{i}}{\text{/}}(\partial \beta \partial \alpha )$. Это обстоятельство позволяет сформулировать обратное утверждение.
Теорема 2. Пусть ${{n}_{a}} > 0$, ${{n}_{i}} > 0$ – непрерывно дифференцируемое решение (18) в прямоугольнике $\Pi $, для которого существуют обе непрерывные в $\Pi $ смешанные частные производные ${{\partial }^{2}}{{n}_{a}}{\text{/}}(\partial \alpha \partial \beta )$, ${{\partial }^{2}}{{n}_{a}}{\text{/}}(\partial \beta \partial \alpha )$ и ${{\partial }^{2}}{{n}_{i}}{\text{/}}(\partial \alpha \partial \beta )$, ${{\partial }^{2}}{{n}_{i}}{\text{/}}(\partial \beta \partial \alpha )$. Тогда найдутся дважды непрерывно дифференцируемые функции $A(\alpha )$, $B(\beta )$, определенные на сторонах прямоугольника, соответственно, $[{{\alpha }_{0}},{{\alpha }_{1}}]$ и $[\beta ,{{\beta }_{1}}]$, для которых $A(\alpha ) \ne B(\beta )$ при всех $\alpha \in [{{\alpha }_{0}},{{\alpha }_{1}}]$, $\beta \in [{{\beta }_{0}},{{\beta }_{1}}]$ и всюду в $\Pi $ выполнены равенства (19).
Замечание. Таким образом, для класса положительных непрерывно дифференцируемых решений системы (18), для которых в $\Pi $ существуют обе непрерывные смешанные частные производные, формулы (19) задают общий вид решений этого класса.
Из теоремы 1 п. 2) следует, что в формулах (19) всегда можно считать $A(\alpha )$, $B(\beta )$ монотонно неубывающими функциями на $[{{\alpha }_{0}},{{\alpha }_{1}}]$, $[{{\beta }_{0}},{{\beta }_{1}}]$ соответственно. Кроме того, стороны прямоугольника $\Pi $ могут быть интервалами или полуинтервалами, в том числе полубесконечными или бесконечными. Соответствующие изменения формулировки теоремы 1 п. 3) очевидны.
Из теорем 1, 2 следует, что в ${{\varphi }^{{ - 1}}}(\Pi )$ решение системы (16) задается формулами:
(21)
${{n}_{a}}(t,z) = \frac{{B{\kern 1pt} '\left( {\frac{{z - t{{v}_{a}}}}{{{{v}_{i}} - {{v}_{a}}}}} \right)}}{{{{k}_{I}}\left[ {A\left( {\frac{{t{{v}_{i}} - z}}{{{{v}_{i}} - {{v}_{a}}}}} \right) - B\left( {\frac{{z - t{{v}_{a}}}}{{{{v}_{i}} - {{v}_{a}}}}} \right)} \right]}},\quad {{n}_{i}}(t,z) = \frac{{A{\kern 1pt} '\left( {\frac{{z - t{{v}_{a}}}}{{{{v}_{i}} - {{v}_{a}}}}} \right)}}{{{{k}_{I}}\left[ {A\left( {\frac{{t{{v}_{i}} - z}}{{{{v}_{i}} - {{v}_{a}}}}} \right) - B\left( {\frac{{z - t{{v}_{a}}}}{{{{v}_{i}} - {{v}_{a}}}}} \right)} \right]}},$Формулы (21) справедливы для ${{v}_{i}} \ne {{v}_{a}}$. При ${{v}_{i}} = {{v}_{a}}$ они теряют смысл. Для ${{v}_{i}} = {{v}_{a}} = v$ общее решение системы (16) получается напрямую, без введения новых координат $\alpha $, $\beta $, интегрированием уравнений этой системы вдоль характеристик. Характеристики системы (16) имеют вид $z(t) = vt + {\text{const}}$ и различаются значениями ${\text{const}}$. Пусть ${{n}_{a}}(t) = {{n}_{a}}(t,z(t))$, ${{n}_{i}}(t) = {{n}_{i}}(t,z(t))$ значения неизвестных функций ${{n}_{a}}$, ${{n}_{i}}$ вдоль фиксированной характеристики. Тогда из (16) следует, что функции ${{n}_{a}}(t)$, ${{n}_{i}}(t)$ удовлетворяют системе ОДУ
(22)
$d{{n}_{a}}{\text{/}}dt = - {{k}_{I}}{{n}_{a}}{{n}_{i}},\quad d{{n}_{i}}{\text{/}}dt = {{k}_{I}}{{n}_{a}}{{n}_{i}}.$(24)
${{n}_{i}} = CD\exp (C{{k}_{I}}t){{[1 + D\exp (C{{k}_{I}}t)]}^{{ - 1}}},\quad {{n}_{a}} = C - {{n}_{i}} = C{{[1 + D\exp (C{{k}_{I}}t)]}^{{ - 1}}},\quad D \geqslant 0,\quad C > 0.$Применим формулы (21), (24) для решения начально-краевых задач для системы (16), которые представляют основной практический интерес. Ограничимся следующими простейшими задачами.
Задача 1. Начальная задача (задача Коши): в полуплоскости $z \in \mathbb{R}$, $t \geqslant 0$ найти непрерывно дифференцируемое решение системы (16), для которого выполнены начальные условия ${{n}_{a}}(0,z) = n_{a}^{0}(z)$, ${{n}_{i}}(0,z) = n_{i}^{0}(z)$, $z \in \mathbb{R}$, где $n_{a}^{0}(z)$, $n_{i}^{0}(z)$ – заданные неотрицательные непрерывно дифференцируемые функции на прямой.
Задача 2. Краевая задача: для ${{v}_{a}},{{v}_{i}} \geqslant 0$ в полуплоскости $z \geqslant 0$, $t \in \mathbb{R}$ найти непрерывно дифференцируемое решение системы (16), для которого выполнены краевые условия ${{n}_{a}}(t,0) = {{n}_{{a0}}}(t)$, ${{n}_{i}}(t,0) = {{n}_{{i0}}}(t)$, $t \in \mathbb{R}$, где ${{n}_{{a0}}}(t)$, ${{n}_{{i0}}}(t)$ – заданные неотрицательные непрерывно дифференцируемые функции на прямой.
Задача 3. Начально-краевая (смешанная) задача: для ${{v}_{a}},{{v}_{i}} \geqslant 0$ в первом квадранте $z \geqslant 0$, $t \geqslant 0$ найти непрерывно дифференцируемое решение системы (16), для которого выполнены начальные условия ${{n}_{a}}(0,z) = n_{a}^{0}(z)$, ${{n}_{i}}(0,z) = n_{i}^{0}(z)$, $z \geqslant 0$ и краевые условия ${{n}_{a}}(t,0) = {{n}_{{a0}}}(t)$, ${{n}_{i}}(t,0) = {{n}_{{i0}}}(t)$, $t \geqslant 0$, где $n_{a}^{0}(z)$, $n_{i}^{0}(z)$, $z \geqslant 0$, ${{n}_{{a0}}}(t)$, ${{n}_{{i0}}}(t)$, $t \geqslant 0$ – заданные непрерывно дифференцируемые функции на полупрямых $z \geqslant 0$ и $t \geqslant 0$, подчиняющиеся условиям согласованности:
В случае ${{v}_{i}} = {{v}_{a}}$ начально-краевые задачи легко решаются по формуле (32) методом характеристик.
Рассмотрим задачу 1 в случае ${{v}_{a}} \ne {{v}_{i}}$. В переменных $(\alpha ,\beta )$ задача состоит в поиске непрерывно дифференцируемого решения системы (18) в полуплоскости $P\,\mathop = \limits_{{\text{def}}} \,\{ \alpha + \beta \geqslant 0\} $, которое на границе этой полуплоскости $\alpha + \beta = 0$ имеет заданные значения
Функции $A(\alpha )$, $B(\beta )$ ищутся по известным значениям ${{n}_{a}}$ и ${{n}_{i}}$ на прямой $\alpha + \beta = 0$ (т.е. из начальных условий). Из тождеств (19) получим:
(25)
$\begin{gathered} n_{a}^{0}(\beta ({{v}_{i}} - {{v}_{a}})) = {{n}_{a}}( - \beta ,\beta ) = B{\kern 1pt} '(\beta )k_{I}^{{ - 1}}{{(A( - \beta ) - B(\beta ))}^{{ - 1}}}, \\ n_{i}^{0}(\beta ({{v}_{i}} - {{v}_{a}})) = {{n}_{i}}( - \beta ,\beta ) = A{\kern 1pt} '( - \beta )k_{I}^{{ - 1}}{{(A( - \beta ) - B(\beta ))}^{{ - 1}}},\quad \beta \in \mathbb{R}. \\ \end{gathered} $(26)
$B{\kern 1pt} ' = {{n}_{a}}(\beta )({{A}_{0}} - B),\quad A_{0}^{'} = - {{n}_{i}}(\beta )({{A}_{0}} - B).$(27)
$\begin{gathered} B(\beta ) = D + (C - D)\int\limits_0^\beta {{{n}_{a}}(\beta )\exp ( - N(\beta ))d\beta } , \\ {{A}_{0}}(\beta ) = C + (D - C)\int\limits_0^\beta {{{n}_{i}}(\beta )\exp ( - N(\beta ))d\beta } ,\quad N(\beta )\mathop = \limits_{{\text{def}}} \int\limits_0^\beta {({{n}_{a}}(\beta ) + {{n}_{i}}(\beta ))d\beta } . \\ \end{gathered} $Из равенств (27) несложно вывести справедливость условий 1) и 2).
Согласно теореме 1, формулы (19) с учетом (27) дают решение задачи Коши в переменных $(\alpha ,\beta ) \in P$:
(28)
$\begin{gathered} {{n}_{a}}(z,t) = n_{a}^{0}(z - {{v}_{a}}t){{e}^{{ - N(z - {{v}_{a}}t)}}}{{\left[ {1 - \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{z - {{v}_{i}}t} {n_{i}^{0}(p){{e}^{{ - N(p)}}}dp} + \int\limits_0^{z - {{v}_{a}}t} {n_{a}^{0}(p){{e}^{{ - N(p)}}}dp} } \right\}} \right]}^{{ - 1}}}, \\ {{n}_{i}}(z,t) = n_{i}^{0}(z - {{v}_{i}}t){{e}^{{ - N(z - {{v}_{i}}t)}}}{{\left[ {1 - \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{z - {{v}_{i}}t} {n_{i}^{0}(p){{e}^{{ - N(p)}}}dp} + \int\limits_0^{z - {{v}_{a}}t} {n_{a}^{0}(p){{e}^{{ - N(p)}}}dp} } \right\}} \right]}^{{ - 1}}}, \\ N(p) = \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\int\limits_0^p {\left[ {n_{a}^{0}(q) + n_{i}^{0}(q)} \right]dq,\quad z \in \mathbb{R},\quad t \geqslant 0,} \\ \end{gathered} $Рассмотрим краевую задачу 2 в случае ${{v}_{i}} \ne {{v}_{a}}$. Анализ этого случая проходит по той же схеме, что и решение задачи Коши выше. Выделим основные моменты. В переменных $(\alpha ,\beta )$ ищем непрерывно дифференцируемое решение системы (18) в полуплоскости ${{P}_{0}} = \{ \alpha {{v}_{a}} + \beta {{v}_{i}} \geqslant 0\} $, для которого функции ${{n}_{a}}$, ${{n}_{i}}$ на границе полуплоскости ${{P}_{0}}$, $\partial {{P}_{0}} = \{ \alpha {{v}_{a}} + \beta {{v}_{i}} = 0\} $ принимают заданные значения ${{n}_{a}}(\alpha ,\beta ) = {{n}_{{a0}}}(\alpha + \beta )$, ${{n}_{i}}(\alpha ,\beta ) = {{n}_{{i0}}}(\alpha + \beta )$, $\alpha {{v}_{a}} + \beta {{v}_{i}} = 0$. Построим такое непрерывно дифференцируемое решение системы (18) в бесконечном прямоугольнике ${{\Pi }_{\infty }} = \mathbb{R} \times \mathbb{R} \supseteq {{P}_{0}}$, которое на границе полуплоскости ${{P}_{0}}$, т.е. на прямой $\alpha {{v}_{a}} + \beta {{v}_{i}} = 0$, совпадает с заданными функциями ${{n}_{{a0}}}(\alpha + \beta )$, ${{n}_{{i0}}}(\alpha + \beta )$. Тогда, очевидно, сужение этого решения на ${{P}_{0}}$ будет искомым решением краевой задачи в координатах $(\alpha ,\beta )$. Согласно теореме 1, искомое решение определяется двумя непрерывно дифференцируемыми функциями $A(\alpha )$, $B(\beta )$ и вычисляется по этим функциям посредством формул (19). При этом функции $A(\alpha )$, $B(\beta )$ должны удовлетворять условиям 1) и 2), сформулированным выше. Функции $A(\alpha )$, $B(\beta )$ ищутся по известным значениям ${{n}_{a}}$, ${{n}_{i}}$ на границе ${{P}_{0}}$. На этой границе $\beta = - \alpha {{v}_{a}}{\text{/}}{{v}_{i}}$ и, значит, согласно (19), имеем
(29)
$\begin{gathered} {{n}_{{a0}}}\left( {\alpha ({{v}_{i}} - {{v}_{a}}){\text{/}}{{v}_{i}}} \right) = B{\kern 1pt} '( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}})k_{I}^{{ - 1}}{{[A(\alpha ) - B( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}})]}^{{ - 1}}}, \\ {{n}_{{i0}}}\left( {\alpha ({{v}_{i}} - {{v}_{a}}){\text{/}}{{v}_{i}}} \right) = A{\kern 1pt} '(\alpha )k_{I}^{{ - 1}}{{[A(\alpha ) - B( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}})]}^{{ - 1}}},\quad \alpha \in \mathbb{R}. \\ \end{gathered} $(30)
$B_{0}^{'} = - {{n}_{a}}(\alpha )(A - {{B}_{0}}),\quad A{\kern 1pt} ' = {{n}_{i}}(\alpha )(A - {{B}_{0}}).$(31)
${{B}_{0}}(\alpha ) = D + (D - C)\int\limits_0^\alpha {{{n}_{a}}{{e}^{N}}d\alpha } ,\quad A(\alpha ) = C + (C - D)\int\limits_0^\alpha {{{n}_{i}}{{e}^{N}}d\alpha } ,\quad N(\alpha )\mathop = \limits_{{\text{def}}} \int\limits_0^\alpha {({{n}_{a}} + {{n}_{i}})d\alpha } .$По формулам (19) с учетом выражений (31) получим решение краевой задачи в координатах $(\alpha ,\beta ) \in {{P}_{0}}$:
(32)
$\begin{gathered} {{n}_{a}}(z,t) = {{n}_{{a0}}}\left( {t - \frac{z}{{{{v}_{a}}}}} \right){{e}^{{N(t - z/{{v}_{a}})}}}{{\left[ {1 + \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{t - z/{{v}_{i}}} {{{v}_{i}}{{n}_{{i0}}}(p){{e}^{{N(p)}}}dp} + \int\limits_0^{t - z/{{v}_{a}}} {{{v}_{a}}{{n}_{{a0}}}(p){{e}^{{N(p)}}}dp} } \right\}} \right]}^{{ - 1}}}, \\ {{n}_{i}}(z,t) = {{n}_{{i0}}}\left( {t - \frac{z}{{{{v}_{i}}}}} \right){{e}^{{N(t - z/{{v}_{i}})}}}{{\left[ {1 + \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{t - z/{{v}_{i}}} {{{v}_{i}}{{n}_{{i0}}}(p){{e}^{{N(p)}}}dp} + \int\limits_0^{t - z/{{v}_{a}}} {{{v}_{a}}{{n}_{{a0}}}(p){{e}^{{N(p)}}}dp} } \right\}} \right]}^{{ - 1}}}, \\ N(p) = \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\int\limits_0^p {[{{v}_{a}}{{n}_{{a0}}}(q) + v{{n}_{{i0}}}(q)]dq} , \\ \end{gathered} $Рассмотрим смешанную задачу 3 в случае ${{v}_{a}} > 0$, ${{v}_{i}} > 0$, ${{v}_{a}} \ne {{v}_{i}}$. В координатах $(\alpha ,\beta )$ ее решение сводится к поиску в тупом угле $\Lambda \mathop = \limits_{{\text{def}}} \,\{ (\alpha ,\beta ):\alpha + \beta \geqslant 0,\;\alpha {{v}_{a}} + \beta {{v}_{i}} \geqslant 0\} $ непрерывно дифференцируемых функций ${{n}_{a}}(\alpha ,\beta )$, ${{n}_{i}}(\alpha ,\beta )$, удовлетворяющих системе (18) и имеющих заданные значения на границе угла $\partial \Lambda $. Последнее множество состоит из двух лучей, которые обозначим через ${{\Lambda }_{t}}$ и ${{\Lambda }_{z}}$: $\partial \Lambda = {{\Lambda }_{t}} \cup {{\Lambda }_{z}}$, ${{\Lambda }_{t}} \cap {{\Lambda }_{z}} = \{ (0,0)\} $, ${{\Lambda }_{t}} = \varphi \{ (t,0):t \geqslant 0\} $, ${{\Lambda }_{z}} = \varphi \{ (0,z):z \geqslant 0\} $. В зависимости от ${{v}_{i}}$, ${{v}_{a}}$ угол $\Lambda $ и лучи ${{\Lambda }_{t}}$, ${{\Lambda }_{z}}$ изображены на фиг. 2.
Фиг. 2.
Угол $\Lambda $ и лучи ${{\Lambda }_{t}}$, ${{\Lambda }_{z}}$ в зависимости от ${{v}_{i}}$, ${{v}_{a}}$.
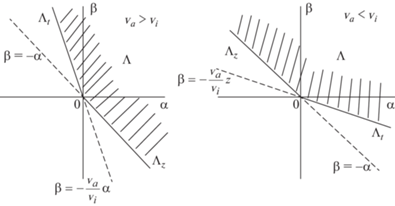
Значения искомого решения на лучах ${{\Lambda }_{t}}$, ${{\Lambda }_{z}}$ определяются равенствами ${{n}_{a}}(\alpha ,\beta ) = {{n}_{{a0}}}(\alpha + \beta )$, ${{n}_{i}}(\alpha ,\beta ) = {{n}_{{i0}}}(\alpha + \beta )$, $(\alpha ,\beta ) \in {{\Lambda }_{t}}$, $\alpha {{v}_{a}} + \beta {{v}_{i}} = 0$, $\alpha + \beta \geqslant 0$; ${{n}_{a}}(\alpha ,\beta ) = n_{a}^{0}(\alpha {{v}_{a}} + \beta {{v}_{i}})$, ${{n}_{i}}(\alpha ,\beta ) = $ $ = n_{i}^{0}(\alpha {{v}_{a}} + \beta {{v}_{i}})$, $(\alpha ,\beta ) \in {{\Lambda }_{z}}$, $\alpha + \beta = 0$, $\alpha {{v}_{a}} + \beta {{v}_{i}} \geqslant 0$. Проведем построение искомого решения для случая ${{v}_{i}} > {{v}_{a}}$. Для нахождения искомого решения в угле $\Lambda $ построим непрерывно дифференцируемое решение системы (18) в бесконечном прямоугольнике ${{\Pi }_{\infty }} = \mathbb{R} \times \mathbb{R} \supseteq \Lambda $, которое на лучах ${{\Lambda }_{t}}$ и ${{\Lambda }_{z}}$ совпадает с указанными выше значениями. Тогда сужение построенного решения в прямоугольнике ${{\Pi }_{\infty }}$ на угле $\Lambda $ даст решение смешанной задачи. Решение системы (18) в ${{\Pi }_{\infty }}$, согласно теореме 1, определяется двумя дважды непрерывно дифференцируемыми в $\mathbb{R}$ функциями $A(\alpha )$, $B(\beta )$ и вычисляется по этим функциям посредством формул (19). Покажем, что функции $A(\alpha )$, $B(\beta )$ однозначно определяются значениями искомого решения на лучах ${{\Lambda }_{t}}$ и ${{\Lambda }_{z}}$. Имеем следующее:
(33)
$\begin{gathered} \begin{array}{*{20}{c}} {\mathop {{{\Lambda }_{t}}}\limits_{(\beta = - \alpha {{v}_{a}}/{{v}_{i}})} \,:\;\;}&\begin{gathered} {{n}_{{a0}}}\left( {\alpha \frac{{{{v}_{i}} - {{v}_{a}}}}{{{{v}_{i}}}}} \right) = {{n}_{a}}(\alpha ,\beta )\;\mathop = \limits_{(19)} \;\frac{{B{\kern 1pt} '(\beta )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}} = \frac{{B{\kern 1pt} '( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}})}}{{{{k}_{I}}(A(\alpha ) - B( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}}))}},\quad \alpha \geqslant 0, \hfill \\ {{n}_{{i0}}}\left( {\alpha \frac{{{{v}_{i}} - {{v}_{a}}}}{{{{v}_{i}}}}} \right) = {{n}_{i}}(\alpha ,\beta )\;\mathop = \limits_{(19)} \;\frac{{A{\kern 1pt} '(\alpha )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}} = \frac{{A{\kern 1pt} '(\alpha )}}{{{{k}_{I}}(A(\alpha ) - B( - \alpha {{v}_{a}}{\text{/}}{{v}_{i}}))}},\quad \alpha \geqslant 0, \hfill \\ \end{gathered} \end{array} \\ \begin{array}{*{20}{c}} {\mathop {{{\Lambda }_{z}}}\limits_{(\beta = - \alpha )} \,:\;\;}&\begin{gathered} {{n}_{{a0}}}\left( {\beta ({{v}_{i}} - {{v}_{a}})} \right) = {{n}_{a}}(\alpha ,\beta )\;\mathop = \limits_{(19)} \;\frac{{B{\kern 1pt} '(\beta )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}} = \frac{{B{\kern 1pt} '(\beta )}}{{{{k}_{I}}(A( - \beta ) - B(\beta ))}},\quad \beta \geqslant 0, \hfill \\ {{n}_{{i0}}}\left( {\beta ({{v}_{i}} - {{v}_{a}})} \right) = {{n}_{i}}(\alpha ,\beta )\;\mathop = \limits_{(19)} \;\frac{{A{\kern 1pt} '(\alpha )}}{{{{k}_{I}}(A(\alpha ) - B(\beta ))}} = \frac{{A{\kern 1pt} '( - \beta )}}{{{{k}_{I}}(A( - \beta ) - B(\beta ))}},\quad \beta \geqslant 0. \hfill \\ \end{gathered} \end{array} \\ \end{gathered} $(34)
$\begin{gathered} B_{0}^{'} = - {{{\bar {n}}}_{{a0}}}(\alpha )(A - {{B}_{0}}),\quad A{\kern 1pt} ' = {{{\bar {n}}}_{{i0}}}(\alpha )(A - {{B}_{0}}),\quad \alpha \geqslant 0, \\ {{{\bar {n}}}_{{a0}}}(\alpha )\mathop = \limits_{{\text{def}}} {{k}_{I}}\frac{{{{v}_{a}}}}{{{{v}_{i}}}}{{n}_{{a0}}}\left( {\alpha \frac{{{{v}_{i}} - {{v}_{a}}}}{{{{v}_{i}}}}} \right),\quad {{{\bar {n}}}_{{i0}}}(\alpha )\mathop = \limits_{{\text{def}}} {{k}_{I}}{{n}_{{i0}}}\left( {\alpha \frac{{{{v}_{i}} - {{v}_{a}}}}{{{{v}_{i}}}}} \right), \\ \end{gathered} $(35)
$\begin{gathered} B{\kern 1pt} ' = \bar {n}_{a}^{0}(\beta )({{A}_{0}} - B),\quad A_{0}^{'} = - \bar {n}_{i}^{0}(\beta )({{A}_{0}} - B),\quad \beta \geqslant 0, \\ \bar {n}_{a}^{0}(\beta )\mathop = \limits_{{\text{def}}} {{k}_{I}}n_{a}^{0}\left( {\beta ({{v}_{i}} - {{v}_{a}})} \right),\quad \bar {n}_{i}^{0}(\beta )\mathop = \limits_{{\text{def}}} {{k}_{I}}n_{i}^{0}\left( {\beta ({{v}_{i}} - {{v}_{a}})} \right). \\ \end{gathered} $(36)
$B(\beta )\mathop = \limits_{{\text{def}}} {{B}_{0}}( - \beta {{v}_{i}}{\text{/}}{{v}_{a}}),\quad \beta \geqslant 0,\quad A(\alpha ) = {{A}_{0}}( - \alpha ),\quad \alpha \leqslant 0.$Чтобы проверить условия 1) и 2) и преобразовать к удобному для анализа виду формулы (19), воспользуемся явными выражениями решений задач Коши для систем (35), (34), которые дают для $A(\alpha )$, $B(\beta )$ выражения:
(37)
$\begin{gathered} A(\alpha ) = \left\{ \begin{gathered} C + (D - C)\int\limits_0^{ - \alpha } {\bar {n}_{i}^{0}{{e}^{{ - N}}}d\alpha ,} \quad \alpha \leqslant 0, \hfill \\ C + (C - D)\int\limits_0^\alpha {{{{\bar {n}}}_{{i0}}}{{e}^{M}}d\alpha ,} \quad \alpha \geqslant 0, \hfill \\ \end{gathered} \right.\quad B(\beta ) = \left\{ \begin{gathered} D + (D - C)\int\limits_0^{ - \beta {{{v}}_{i}}/{{{v}}_{a}}} {{{{\bar {n}}}_{{a0}}}{{e}^{M}}d\beta } ,\quad \beta \leqslant 0, \hfill \\ D + (C - D)\int\limits_0^\beta {\bar {n}_{a}^{0}{{e}^{{ - N}}}d\beta } ,\quad \beta \geqslant 0, \hfill \\ \end{gathered} \right. \\ N(\beta ) = \int\limits_0^\beta {(\bar {n}_{a}^{0} + \bar {n}_{a}^{0})d\beta } ,\quad M(\alpha ) = \int\limits_0^\alpha {({{{\bar {n}}}_{{a0}}} + {{{\bar {n}}}_{{i0}}})d\alpha } . \\ \end{gathered} $Наконец, преобразуем формулы (19), задающие решение системы (18) в прямоугольнике ${{\Pi }_{*}} \supseteq \Lambda $, в каждом из 4 квадрантов плоскости $(\alpha ,\beta )$. При этом ограничимся только квадрантами I, II, IV, квадрант III, где $\alpha \leqslant 0$, $\beta \leqslant 0$, исключим из рассмотрения, поскольку тупой угол $\Lambda $, согласно фиг. 3, лежит в объединении квадрантов I, II, IV, а с квадрантом III пересекается только по нулевой точке. Для удобства введем в рассмотрение функции
(38)
${{N}_{*}}(p)\mathop = \limits_{{\text{def}}} \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\int\limits_0^p {(n_{a}^{0}(q) + n_{i}^{0}(q))dq} ,\quad {{M}_{*}}(p)\mathop = \limits_{{\text{def}}} \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\int\limits_0^p {({{v}_{a}}{{n}_{{a0}}}(q) + {{v}_{i}}{{n}_{{i0}}}(q))dq} .$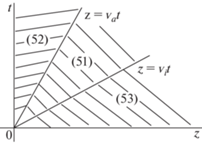
Для $\alpha \geqslant 0$, $\beta \geqslant 0$ имеем
(39)
$\begin{gathered} {{n}_{a}}(z,t) = [n_{a}^{0}(z - {{v}_{a}}t)\exp [ - {{N}_{*}}(z - {{v}_{a}}t)]]R_{1}^{{ - 1}}(z,t), \\ {{n}_{i}}(z,t) = [{{n}_{{i0}}}(t - z{\text{/}}{{v}_{i}})\exp [{{M}_{*}}(t - z{\text{/}}{{v}_{i}})]]R_{1}^{{ - 1}}(z,t), \\ {{R}_{1}}(z,t) = 1 + \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{t - z/{{v}_{i}}} {{{v}_{i}}{{n}_{{i0}}}(p)\exp {{M}_{*}}(p)dp} - \int\limits_0^{z - {{v}_{a}}t} {n_{a}^{0}(p)\exp ( - {{N}_{*}}(p))dp} } \right\}; \\ \end{gathered} $(40)
$\begin{gathered} {{n}_{a}}(z,t) = [{{n}_{{a0}}}(t - z{\text{/}}{{v}_{a}})\exp [{{M}_{*}}(t - z{\text{/}}{{v}_{a}})]]R_{2}^{{ - 1}}(z,t), \\ {{n}_{i}}(z,t) = [{{n}_{{i0}}}(t - z{\text{/}}{{v}_{i}})\exp [{{M}_{*}}(t - z{\text{/}}{{v}_{i}})]]R_{2}^{{ - 1}}(z,t), \\ {{R}_{2}}(z,t) = 1 + \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{t - z/{{v}_{i}}} {{{v}_{i}}{{n}_{{i0}}}(p)\exp {{M}_{*}}(p)dp} + \int\limits_0^{t - z/{{v}_{a}}} {{{v}_{a}}{{n}_{{a0}}}(p)\exp {{M}_{*}}(p)dp} } \right\}; \\ \end{gathered} $(41)
$\begin{gathered} {{n}_{a}}(z,t) = [n_{a}^{0}(z - {{v}_{a}}t)\exp [ - {{N}_{*}}(z - {{v}_{a}}t)]]R_{3}^{{ - 1}}(z,t), \\ {{n}_{i}}(z,t) = [n_{i}^{0}(z - {{v}_{i}}t)\exp [ - {{N}_{*}}(z - {{v}_{i}}t)]]R_{3}^{{ - 1}}(z,t), \\ {{R}_{3}}(z,t) = 1 - \frac{{{{k}_{I}}}}{{{{v}_{i}} - {{v}_{a}}}}\left\{ {\int\limits_0^{z - {{v}_{i}}t} {n_{i}^{0}(p)\exp [ - {{N}_{*}}(p)]dp} + \int\limits_0^{z - {{v}_{a}}t} {n_{a}^{0}(p)\exp [ - {{N}_{*}}(p)]dp} } \right\}. \\ \end{gathered} $4. ИОНИЗАЦИОННЫЕ КОЛЕБАНИЯ (БРИВИНГ-МОДЫ)
В разд. 2 было установлено, что для знакоопределенных на отрезке $[0,L]$ скоростей ${{v}_{a}}(z)$, ${{v}_{i}}(z)$ система уравнений ионизации (1) имеет единственное стационарное решение, удовлетворяющее заданным (стационарным) граничным условиям. При этом граничные условия для ${{n}_{a}}$, ${{n}_{i}}$ в зависимости от знака соответствующей скорости ставятся либо на левом конце $z = 0$, либо на правом $z = L$. Например, если ${{v}_{i}}(z) > 0$ на $[0,L]$, то на левом конце $z = 0$ считается заданной величина ${{n}_{i}}(0,t)$ в каждый момент времени $t \geqslant 0$, а если ${{v}_{i}}(z) < 0$, то считается заданной величина ${{n}_{i}}(L,t)$, $t \geqslant 0$, и аналогично для ${{n}_{a}}$. Численно было установлено также, что в случае знакоопределенных скоростей ${{v}_{a}}$, ${{v}_{i}}$ при $t \to + \infty $ решение начально-краевой задачи для системы (1) со стационарными краевыми условиями устанавливается, т.е. при $t \to + \infty $ сходится в равномерной метрике на $[0,L]$ к единственному стационарному решению системы (1). В частности, в этом случае ионизационные колебания (бривинг-моды) отсутствуют.
При исследовании процесса ионизации в СПД обычно считается ${{v}_{a}}(z) \equiv {{v}_{a}} = {\text{const}} > {\text{0}}$. Таким образом, ограничиваясь этим практически важным случаем, можно утверждать, что необходимым (но, вероятно, не достаточным) условием существования ионизационных колебаний является знакопеременность скорости ${{v}_{i}}(z)$ на отрезке $[0,L]$. Этот вывод согласуется с экспериментальными данными по СПД, согласно которым [13] ионная скорость ${{v}_{i}}$ всегда отрицательна по направлению $z$ в прианодной области и, следовательно, применительно к одномерному случаю ${{v}_{i}}(z)$ имеет единственный нуль ${{z}_{0}}$ на $[0,L]$, причем $0 < {{z}_{0}} < L$, $v_{i}^{'}({{z}_{0}}) > 0$ и, значит, ${{v}_{i}}(z)$ меняет знак с минуса на плюс, когда $z$, возрастая, проходит через точку ${{z}_{0}}$. Типичными модельными примерами в одномерной задаче являются функции ${{v}_{i}}(z) = \alpha (z - {{z}_{0}})$, $\alpha > 0$, $0 < {{z}_{0}} < L$, ${{v}_{i}}(z) = a(z + {{z}_{1}})(z - {{z}_{0}})$, $a > 0$, ${{z}_{1}} > 0$, $0 < {{z}_{0}} < L$, ${{v}_{i}}(z) = - \cos (\pi z{\text{/}}L)$ (и тогда ${{z}_{0}} = L{\text{/}}2$).
Рассмотрим причину возникновения бривинг-мод в случае, когда ионная скорость ${{v}_{i}}(z)$ имеет указанный выше специальный вид. В этом случае граничные условия ставятся только для ${{n}_{a}}$ на левой границе $z = 0$, для ${{n}_{i}}$ они формально не нужны, поскольку ${{v}_{i}}(0) < 0 < {{v}_{i}}(L)$ и, значит, ионы через границы $z = 0$ и $z = L$ покидают область $[0,L]$. Однако при этом возникает “внутреннее” граничное условие для ${{n}_{i}}$ на характеристике $z = {{z}_{0}}$ для уравнения переноса ионов (1), которое объясняет возникновение бривинг-мод. Остановимся на этом подробнее. Начально-краевая задача на отрезке $[0,L]$ для системы (1) распадается на две начально-краевые задачи на отрезках $[0,{{z}_{0}}]$ и $[{{z}_{0}},L]$ соответственно, которые решаются последовательно. При этом краевое условие ${{n}_{i}}(t)\mathop = \limits_{{\text{def}}} {{n}_{i}}({{z}_{0}},t)$ для функции ${{n}_{i}}$ на характеристике $z = {{z}_{0}}$, являющейся границей для обеих смешанных задач, ищется из решения задачи Коши для ОДУ
(42)
$d{{n}_{i}}{\text{/}}dt = \beta {{n}_{a}}{{n}_{i}} - \alpha {{n}_{i}},\quad {{n}_{i}}(0) = n_{i}^{0}({{z}_{0}}),\quad \alpha \mathop = \limits_{{\text{def}}} v_{i}^{'}({{z}_{0}}),$Как показали расчеты, ионизационные колебания (бривинг-моды) имеют место только тогда, когда решение задачи Коши (42) при $t \to + \infty $ выходит на периодический режим. При этом ${{n}_{a}}(t) = {{n}_{a}}({{z}_{0}},t)$ на характеристике $z = {{z}_{0}}$ удовлетворяет уравнению
(43)
$d{{n}_{a}}{\text{/}}dt = - \beta {{n}_{a}}{{n}_{i}} + \gamma (t){{n}_{a}},\quad {{n}_{a}}(0) = n_{a}^{0}({{z}_{0}}),$Функция $\gamma (t)$ находится численно, решением разностных уравнений (15): на нулевом слое ${{\gamma }^{0}} = - (n_{{a,{{k}_{0}}}}^{0} - n_{{a,{{k}_{0}} - 1}}^{0}){\text{/}}h \cdot {{v}_{a}}{\text{/}}n_{{a,{{k}_{0}}}}^{0}$, где ${{z}_{0}} = {{z}_{{{{k}_{0}}}}}$.
Расчеты значений ${{n}_{i}}$, ${{n}_{a}}$ на характеристике $z = {{z}_{0}}$ и функции $\gamma (t)$ для трех типов скоростей ионов ${{v}_{i}}(z) = \alpha (z - {{z}_{0}})$, $\alpha > 0$, ${{v}_{i}} = a(z + {{z}_{1}})(z - {{z}_{0}})$, $a > 0$, ${{v}_{i}}(z) = - \cos (\pi z{\text{/}}L)$ приведены на фиг. 4.
Фиг. 4.
Значения ${{n}_{i}}$, ${{n}_{a}}$ на характеристике $z = 1$ и функции $\gamma (t)$ для трех типов скоростей ионов ${{v}_{i}}(z) = z - 1$ (красная линия), ${{v}_{i}}(z) = (z + 0.5)(z - 1)$ (зеленая линия), ${{v}_{i}}(z) = - \cos (\pi z{\text{/}}2)$ (синяя линия).

Если бы функция $\gamma (t)$ была положительной константой, то из (42), (43) вытекало бы, что на характеристике $z = {{z}_{0}}$ функции ${{n}_{i}}(t)$, ${{n}_{a}}(t)$ удовлетворяют уравнениям Лотки–Вольтерра, что, как показывают примеры, не имеет места. Поэтому существование бривинг-мод не удается связать с моделью Лотки–Вольтерра.
5. ИОНИЗАЦИОННЫЕ КОЛЕБАНИЯ В ОБЩЕМ СЛУЧАЕ
Недостаток ионизационной модели (1) в том, что скорости ${{v}_{a}}(z)$, ${{v}_{i}}(z)$ считаются известными и не зависящими от времени $t$. Применительно к СПД обычно считается ${{v}_{a}}(z) \equiv {{v}_{a}} = {\text{const}} > {\text{0}}$, а ${{v}_{i}}$ находится из уравнения движения ионов. Движение ионов определяется электромагнитным полем в камере СПД и их столкновениями с боковыми керамическими стенками камеры и поверхностью анода. Наличие в установке сильного почти радиального магнитного поля и продольного электрического поля и, как следствие, справедливость соотношения ${{r}_{{\Lambda i}}} \gg L$ (${{r}_{{\Lambda i}}}$ – ларморовский радиус ионов) предопределяют движение ионов преимущественно в продольном направлении, параллельно поверхностям боковых стенок. Поэтому столкновениями ионов и атомов Xe со стенками в первом приближении можно пренебречь. Электромагнитное поле в СПД складывается из индукционного и внешнего электромагнитного поля, порождаемого постоянными токами обмоток СПД и заданной разностью потенциалов между анодом и катодом. Пренебрегая индукционными полями, порождаемыми плазменными токами, в частности, столкновениями ионов с электронами, приходим к следующей упрощенной кинетической модели движения ионов и атомов:
(44)
$\begin{gathered} \partial {{f}_{i}}{\text{/}}\partial t + \left\langle {{\mathbf{v}},{{\nabla }_{{\mathbf{x}}}}{{f}_{i}}} \right\rangle + \left\langle {{\mathbf{F}},{{\nabla }_{{\mathbf{v}}}}{{f}_{i}}} \right\rangle = \beta {{n}_{i}}{{f}_{a}},\quad {\mathbf{F}}(t,{\mathbf{x}},{\mathbf{v}}) = em_{i}^{{ - 1}}\left( {{\mathbf{E}} + {{c}^{{ - 1}}}[{\mathbf{v}},{\mathbf{H}}]} \right), \\ \partial {{f}_{a}}{\text{/}}\partial t + \left\langle {{\mathbf{v}},{{\nabla }_{{\mathbf{x}}}}{{f}_{a}}} \right\rangle = - \beta {{n}_{i}}{{f}_{a}},\quad {{n}_{i}} = \int\limits_{{{\mathbb{R}}^{3}}} {{{f}_{i}}d{\mathbf{v}}} ,\quad \beta = {\text{const}} > {\text{0}}, \\ \end{gathered} $(45)
${{{\mathbf{v}}}_{i}} = n_{i}^{{ - 1}}\int\limits_{{{\mathbb{R}}^{3}}} {{{f}_{i}}{\mathbf{v}}d{\mathbf{v}}} .$(46)
$\begin{gathered} \frac{{\partial {{f}_{i}}}}{{\partial t}} + {{v}_{z}}\frac{{\partial {{f}_{i}}}}{{\partial z}} + \frac{e}{{{{m}_{i}}}}\left[ {{{E}_{y}} + \frac{{{{H}_{x}}{{v}_{z}}}}{c}} \right]\frac{{\partial {{f}_{i}}}}{{\partial {{v}_{y}}}} + \frac{e}{{{{m}_{i}}}}\left( {{{E}_{z}} - \frac{{{{H}_{x}}{{v}_{y}}}}{c}} \right)\frac{{\partial {{f}_{i}}}}{{\partial {{v}_{z}}}} = \beta {{n}_{i}}{{n}_{a}}\delta ({{v}_{y}})\delta ({{v}_{z}} - {{v}_{a}}), \\ \frac{{\partial {{n}_{a}}}}{{\partial t}} + {{v}_{a}}\frac{{\partial {{n}_{a}}}}{{\partial z}} = - \beta {{n}_{i}}{{n}_{a}},\quad {{n}_{i}} = \int\limits_{{{\mathbb{R}}^{2}}} {{{f}_{i}}d{{v}_{y}}d{{v}_{z}}} , \\ \end{gathered} $(47)
$\begin{gathered} \partial {{f}_{i}}{\text{/}}\partial t + {{v}_{z}}\partial {{f}_{i}}{\text{/}}\partial z + \varepsilon {{H}_{x}}{{v}_{z}}\partial {{f}_{i}}{\text{/}}\partial {{v}_{y}} + \varepsilon \left[ {{{E}_{z}} - {{H}_{x}}{{v}_{y}}} \right]\partial {{f}_{i}}{\text{/}}\partial {{v}_{z}} = {{k}_{I}}{{n}_{i}}{{n}_{a}}\delta ({{v}_{y}})\delta ({{v}_{z}} - {{v}_{a}}), \\ \partial {{n}_{a}}{\text{/}}\partial t + {{v}_{a}}\partial {{n}_{a}}{\text{/}}\partial z = - {{k}_{I}}{{n}_{i}}{{n}_{a}},\quad {{n}_{i}} = \int\limits_{{{\mathbb{R}}^{2}}} {{{f}_{i}}d{{v}_{y}}d{{v}_{z}}} , \\ \end{gathered} $На фиг. 5 представлены результаты решения системы (47), демонстрирующие возникновение ионизационных колебаний при $t \to + \infty $, причем продольная скорость ионов ${{v}_{z}}$ зависит от времени, периодична для больших $t$ и меняет знак в определенные моменты времени. Заметим, что для других входных данных концентрации ${{n}_{i}}$, ${{n}_{a}}$, вычисляемые по (47), выходят на установление [18] и, таким образом, бривинг-моды отсутствуют, но при этом разрядный ток испытывает низкочастотные осцилляции вокруг некоторых средних значений. Это означает, что колебания разрядного тока необязательно обусловлены ионизационными колебаниями.
Фиг. 5.
Графики функций ${{n}_{i}}(z,t)$, ${{n}_{a}}(z,t)$, ${{v}_{z}}(z,t)$ на плоскости $(z,t)$, демонстрирующие бривинг-моды, для значений параметров $\varepsilon = 1$, ${{k}_{I}} = 0.56$, ${{E}_{z}} = 2$, ${{H}_{x}} = 2$, $n_{i}^{0} = 0.1$, $n_{a}^{0}(z) = 10{\text{/}}(1 + 100z)$, ${{v}_{a}} = 0.1$.

6. ЗАКЛЮЧЕНИЕ
Для изучения ионизационных колебаний (бривинг-мод) в стационарных плазменных двигателях (СПД) выше предложены две математические модели ионизации – гидродинамическая и кинетическая. Уравнения гидродинамической модели проще и поддаются аналитическому исследованию. В частности, выше были классифицированы стационарные решения уравнений гидродинамической модели и дано их полное аналитическое решение в случаях постоянных скоростей атомов и ионов, что, в свою очередь, позволяет аналитически решать различные начально-краевые задачи. Ионизационные колебания на базе гидродинамической модели исследовались численно, и выше был сформулирован критерий (необходимое и достаточное условие) существования бривинг-мод. Недостаток гидродинамической модели в том, что скорость ионов считается заданной и стационарной, а процесс ионизации никак не связан с ускорением ионов. В более сложной кинетической модели скорость ионов определяется из их движения, а процессы ионизации и ускорения ионов исследуются совместно. В кинетической модели, также как и в гидродинамической, существуют бривинг-моды, но картина ионизационных колебаний отличается от гидродинамического случая. Возможности кинетической модели намного шире, чем гидродинамической. В частности, кинетическая модель позволяет найти распределение ионного тока и силу тяги СПД и проанализировать причины паразитических колебаний тока и силы тяги.
Список литературы
Козубский К.Н., Мурашко В.М., Рылов В.П., Трифонов Ю.В., Ходенко В.П., Ким В.П., Попов Г.А., Обухов В.А. СПД работает в космосе // Физика плазмы. 2003. Т. 29. № 3. С. 277–792.
Kim V., Kozubsky K.N., Murashko V.M., Semenkin A.V. History of the Hall Thrusters Development in USSR // IEPC-2007-142, 30th International Electric Propulsion Conference, Florence, Italy, September 17–20, 2007.
Ким В.П., Семенкин А.В., Хартов С.А. Конструктивные и физические особенности двигателей с замкнутым дрейфом электронов. М.: Изд-во МАИ, 2016. 160 с.
Mitrofanova O.A., Gnizdor R.Yu., Murashko V.M., Koryakin A.I., Nesterenko A.N. New Generation of SPT-100 // IEPC-2011-041, 32nd International Electric Propulsion Conference, Wiesbaden, Germany, September 11–15, 2011.
Lotka A.J. Elements of Physical Biology. Baltimore: Williams and Wilkins, 1925. New York: Dover Publications, Inc., 1956.
Volterra V. Lessons on the Mathematical Theory of Struggle for Life (Original: Leçons sur la théorie mathématique de la Lutte pour la vie). Paris: Gauthier-Villars, 1931. (Вольтерра В. Математическая теория борьбы за существование: Пер. с франц. 1976. 288 с.)
Baranov V.I., Nazarenko Y.S., Petrosov V.A., Vasin A.I., Yashnov Y.M. Theory of Oscillations and Conductivity for Hall Thrusters, 32nd Joint Propulsion Conference, AIAA 96-3192, 1996.
Fife J., Martínez-Sánchez M., Szabo J. A numerical study of low-frequency discharge oscillations in Hall thrusters, 33rd Joint Propulsion Conference, AIAA 97-3052, 1997.
Barral S., Ahedo E. On the Origin of Low Frequency Oscillations in Hall Thrusters // AIP Conf. Proc. 2008. V. 993. № 439. P. 439–442.
Dale E., Jorns B. Two-zone Hall thruster breathing mode mechanism, Part I: Theory, 36th International Electric Propulsion Conference, University of Vienna, Austria, 2019.
Boeuf J., Garrigues L. Low frequency oscillations in a stationary plasma thruster // J. of Applied Physics. 1998. V. 84. № 7. P. 3541–3554.
Chapurin O., Smolyakov A., Hagelaar G., Raitses Y. On the mechanism of ionization oscillations in Hall thrusters // J. of Applied Physics. 2021. V. 129. № 23. P. 233307-1–233307-27.
Бишаев A.M., Ким В. Исследование локальных параметров плазмы в ускорителе с замкнутым дрейфом электронов и протяженной зоной ускорения // Ж. техн. физ. 1978. Т. 48. № 9. С. 1853–1857.
Рождественский Б.Л., Яненко Н.Н. Системы квазилинейных уравнений и их приложения к газовой динамике. М.: Наука, 1978. 688 с.
Роуч П. Вычислительная гидродинамика. М.: Мир, 1980.
Гавриков М.Б., Таюрский А.А. Некоторые математические вопросы ионизации плазмы // Препринты ИПМ им. М.В. Келдыша. 2021. № 94. 48 с.
Березин Ю.А., Вшивков В.А. Метод частиц в динамике разреженной плазмы. Новосибирск: Наука, 1980. 95 с.
Гавриков М.Б., Таюрский А.А. Гибридная модель стационарного плазменного двигателя // Препринты ИПМ им. М.В. Келдыша. 2021. № 35. 48 с.
Дополнительные материалы отсутствуют.
Инструменты
Журнал вычислительной математики и математической физики