

Известия РАН. Механика твердого тела, 2022, № 3, стр. 88-96
ВЛИЯНИЕ ДАВЛЕНИЯ ОКРУЖАЮЩЕЙ СРЕДЫ НА НИЗШУЮ ЧАСТОТУ КОЛЕБАНИЙ ПЛАСТИНЫ
М. А. Ильгамов a, b, c, *, А. Г. Хакимов a, **
a Институт механики им. Р.Р. Мавлютова УФИЦ РАН
Уфа, Россия
b Институт машиноведения им. А.А. Благонравова РАН
Москва, Россия
c Башкирский государственный университет
Уфа, Россия
* E-mail: ilgamov@anrb.ru
** E-mail: hakimov@anrb.ru
Поступила в редакцию 15.03.2021
После доработки 11.09.2021
Принята к публикации 12.10.2021
- EDN: SSFYJU
- DOI: 10.31857/S0572329922030084
Аннотация
Определяется низшая частота изгибных колебаний пластины, контактирующей с жидкостью или газом. Дается вывод выражения распределенной поперечной нагрузки на пластину в предположении ее цилиндрического изгиба. Поверхности пластины контактируют со средой разной плотности и давления. Среда может быть сжимаемой в процессе деформации поверхности и несжимаемой. Определяется влияние на изгиб взаимодействия среднего давления и изменения кривизны срединной поверхности, а также присоединенной массы газовой среды.
1. Введение. Определение спектра частот пластин и оболочек, контактирующих с жидкостью и газом, имеет большое значение [1–3]. Этой теме посвящена обширная литература. К ней примыкает также серия работ по колебаниям тонкостенных тел, не контактирующих с внешней средой.
Работа [4] посвящена аналитическому решению для определения собственных частот и форм изгибных колебаний защемленной по контуру квадратной однородной пластины. Произведено также сравнение расчетов с экспериментальными данными. Предложенная методика исследований и алгоритм расчета могут быть использованы для исследования изгибных колебаний пластин при других типах граничных условий. В [5] рассматривается задача расчета ортотропных полигональных пластин, подвергающихся акустическому воздействию с широким спектром.
В последнее время динамическая теория пластин находит широкое применение в анализе поведения упругих элементов микро- и наноразмеров. Среди многочисленных видов применения микро- и нанопленок, нанопроволок, нанотрубок может быть указано также использование их в качестве детекторов и сенсоров в химии, биологии и т.д [6–8]. Ввиду уникального применения изучению их эксплуатационных свойств уделяется в литературе большое внимание. Например, в [9, 10] дается обзор четырехсот статей, посвященных главным образом консольным резонаторам из нанопленок и нанопроволок. В [11] сообщалось о сверхчувствительных наномеханических резонаторах для структурных исследований ДНК-лигандных комплексов. Резонаторы с электростатическим приводом продемонстрировали большой потенциал в широком спектре применений, таких как датчики, устройства связи, логические элементы и квантовые измерения [12]. Для обнаружения и идентификации различных биочастиц и оценки их размеров в [13] применяется механический наносенсор. Решение нелинейного уравнения проводится с помощью метода Галеркина. В [14] анализируется динамическая неустойчивость консольной нанобалки, соединенной с горизонтальной пружиной.
Однако во всех этих работах взаимодействие среднего давления сред и разности площадей выпуклой и вогнутой поверхностей пластины не учитывается. Это взаимодействие принимается во внимание в [15, 16] в случае легких газов, когда присоединенная масса сред мала. В монографиях [1–3] также не учитывается указанный эффект среднего давления. В [17] определяется спектр частот двухопорного резонатора с учетом взаимодействия среднего избыточного давления на поверхности резонатора и кривизны, а также действия осевой нагрузки.
В данной работе определяется низшая собственная частота пластинки с учетом взаимодействия среднего избыточного давления на ее поверхности и кривизны срединной поверхности, а также действия присоединенной массы газовой среды с удаленными границами. В отличие от постановки задач в [1–3], где задается частота и определяется волновое число, здесь конструктивно задается длина полуволны и определяется частота. Такая постановка характерна для резонаторов.
Представляет интерес вопрос о взаимном влиянии эффекта среднего давления и известного из литературы эффекта присоединенной массы жидкости на деформацию пластины. Это проще выяснить в случае несжимаемой жидкости. Далее, с учетом полученного результата рассматривается случай сжимаемой жидкости в более простой постановке (в частности, не производится разложение в ряд Тейлора условий контакта).
В предположении цилиндрического изгиба тонкой пластины рассматривается уравнение [18]
(1.1)
$D\frac{{{{\partial }^{4}}w}}{{\partial {{x}^{4}}}} + {{\rho }}h\frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}} = q,\quad D = \frac{{E{{h}^{3}}}}{{12(1 - {{{{\nu }}}^{2}})}}$На нижнюю и верхнюю поверхность пластины действуют давления р0 + р1 и р0 + р2 жидкостей с плотностями ρ1 и ρ2 (рис. 1, a). Здесь р0 – давление сборки, в частности, атмосферное давление, действующее на все поверхности, р1, р2 – избыточные давления. При определении нагрузки q исходим из предположения, что ρ1, ρ2 и р1, р2 остаются постоянными при изгибе пластины.
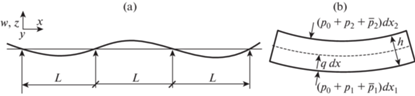
2. Несжимаемая среда. Предполагаем, что области, занятые жидкостями, простираются неограниченно, опоры не препятствуют свободному перетеканию жидкости вдоль пластины в направлении оси x. Возникающие в результате движения пластины давления обозначим через ${{\bar {p}}_{1}}$ и ${{\bar {p}}_{2}}$. Уравнения динамики несжимаемой жидкости относительно потенциала скорости φ(x, z, t) имеют вид [1–3]
(2.1)
$\frac{{{{\partial }^{2}}{{{{\varphi }}}_{{1,2}}}}}{{\partial {{x}^{2}}}} + \frac{{{{\partial }^{2}}{{{{\varphi }}}_{{1,2}}}}}{{\partial {{z}^{2}}}} = 0,\quad {{\bar {p}}_{{1,2}}} = - {{{{\rho }}}_{{1,2}}}\frac{{\partial {{{{\varphi }}}_{{1,2}}}}}{{\partial t}}$Условия на поверхностях
(2.2)
$\frac{{\partial {{{{\varphi }}}_{1}}}}{{\partial z}} = \frac{{\partial w}}{{\partial t}}\left( {z = - \frac{h}{2} + w} \right),\quad \frac{{\partial {{{{\varphi }}}_{2}}}}{{\partial z}} = \frac{{\partial w}}{{\partial t}}\left( {z = \frac{h}{2} + w} \right)$На большом удалении от поверхности возмущения от пластины исчезают
(2.3)
$\frac{{\partial {{{{\varphi }}}_{1}}}}{{\partial z}} = 0\left( {z = - \infty } \right),\quad \frac{{\partial {{{{\varphi }}}_{2}}}}{{\partial z}} = 0\left( {z = \infty } \right)$Элементарные длины dx1, dx2 нижней и верхней поверхностей, выраженные через длину dx срединной поверхности пластины, равны (рис. 1, b)
(2.4)
$d{{x}_{1}} = \left( {1 + {{\varepsilon }_{x}}\left( { - \frac{h}{2}} \right)} \right)dx,\quad d{{x}_{2}} = \left( {1 + {{\varepsilon }_{x}}\left( {\frac{h}{2}} \right)} \right)dx$(2.5)
${{\varepsilon }_{x}}\left( { - \frac{h}{2}} \right) = \frac{h}{2}\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}},\quad {{\varepsilon }_{x}}\left( {\frac{h}{2}} \right) = - \frac{h}{2}\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}}$Распределенная сила q определяется по формуле [15, 16]
(2.6)
$qdx = \left( {{{p}_{0}} + {{p}_{1}} + {{{\bar {p}}}_{1}}} \right)d{{x}_{1}} - \left( {{{p}_{0}} + {{p}_{2}} + {{{\bar {p}}}_{2}}} \right)d{{x}_{2}}$Предполагаем, что пластина неограниченной длины по оси x опирается на опоры, расположенные на равных расстояниях L и допускающие свободный поворот. Примем
что удовлетворяет условиям w = 0, ∂2w/∂x2 = 0 при |x| = 0, L, 2L, … . Тогда в функциях
(2.8)
${{{{\varphi }}}_{1}} = {{\Phi }_{1}}\left( z \right)\sin {{\beta }}x\cos {{\omega }}t,\quad {{{{\varphi }}}_{2}} = {{\Phi }_{2}}\left( z \right)\sin {{\beta }}x\cos {{\omega }}t$Разлагая функции ∂φ1/∂z, ∂φ2/∂z в ряд Тейлора в окрестности z = 0, условия (2.2) приведем к виду
В линейной задаче член с w в данных условиях должен быть опущен. Подставляя сюда выражения (2.7), (2.8) с учетом Φ1, Φ2, получаем
Выражения (2.8) через амплитуду прогиба W приобретают вид
(2.9)
${{{{\varphi }}}_{1}} = W\frac{{{\omega }}}{{{\beta }}}{{\left( {1 - \frac{{{{\beta }}h}}{2}} \right)}^{{ - 1}}}\exp \left( {{{\beta }}z} \right)\sin {{\beta }}x\cos {{\omega }}t$При вычислении акустического давления на поверхностях пластины z = – h/2 + w, z = h/2 + w выражение (2.1) также сведем к поверхности z = 0
Подставим сюда выражения (2.9), предварительно опустив нелинейные члены с w. Тогда получаем
С учетом соотношения для прогиба эти выражения могут быть представлены в виде
(2.10)
${{\bar {p}}_{1}} = - \frac{{{{{{\rho }}}_{1}}}}{{{\beta }}}\frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}},\quad {{\bar {p}}_{2}} = \frac{{{{{{\rho }}}_{2}}}}{{{\beta }}}\frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}}$Из (2.6), (2.4), (2.5), (2.10) находим распределенную поперечную нагрузку
(2.11)
$q = {{p}_{1}} - {{p}_{2}} + \frac{{\left( {2{{p}_{0}} + {{p}_{1}} + {{p}_{2}}} \right)h}}{2} \cdot \frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}} - \frac{{{{{{\rho }}}_{1}} + {{{{\rho }}}_{2}}}}{{{\beta }}} \cdot \frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}} + \left[ { - \frac{{{{{{\rho }}}_{1}} - {{{{\rho }}}_{2}}}}{{{\beta }}} \cdot \frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}}} \right]\frac{h}{2}\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}}$Последний член в скобках (2.11) должен быть опущен в рамках принятого приближения линейной теории. Он обращается в нуль при ρ1 = ρ2.
Уравнение (1.1) с учетом (2.11)
(2.12)
$D\frac{{{{\partial }^{4}}w}}{{\partial {{x}^{4}}}} - \frac{{\left( {2{{p}_{0}} + {{p}_{1}} + {{p}_{2}}} \right)h}}{2}\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}} + \left( {{{\rho }}h + \frac{{{{{{\rho }}}_{1}} + {{{{\rho }}}_{2}}}}{{{\beta }}}} \right)\frac{{{{\partial }^{2}}w}}{{\partial {{t}^{2}}}} = {{p}_{1}} - {{p}_{2}}$В частном случае ρ1 = ρ2, p1 = p2 и функции прогиба (2.7) из (2.12) получаем для низшей собственной частоты ω
(2.13)
${{{{\omega }}}^{2}} = {{\omega }}_{0}^{2}\frac{{1 + {{\alpha }}}}{{1 + {{\mu }}}},\quad {{\omega }}_{0}^{2} = \frac{{D{{{{\beta }}}^{4}}}}{{{{\rho }}h}},\quad {{\alpha }} = \frac{{\left( {{{p}_{0}} + {{p}_{1}}} \right)h}}{{D{{{{\beta }}}^{2}}}},\quad {{\mu }} = \frac{{2{{{{\rho }}}_{1}}}}{{{{\rho }}h{{\beta }}}}$Здесь ω0 – частота пластины, не контактирующей с жидкостью. Параметры α и μ определяют влияние давления и плотности окружающей среды. Таким образом, давление повышает, плотность понижает собственную частоту пластины. При α ≪ 1, μ ≪ 1 их влияние исчезает. Через исходные параметры α, μ записываются
(2.14)
${{\alpha }} \approx \frac{{{{p}_{0}} + {{p}_{1}}}}{E}{{\left( {\frac{L}{h}} \right)}^{2}},\quad {{\mu }} = \frac{{2{{{{\rho }}}_{1}}L}}{{{{\pi \rho }}h}}$При E = 2 × 105 МПа, ν = 0.3, ρ = 7.8 × 103 кг/м3, ρ1 = 103 кг/м3, p0 = 0, p1 = 2 МПа, L/h = 1, α ≈ 10–3, μ = 0.81. Следовательно, нет влияния давления, имеется значительное снижение собственной частоты за счет присоединенной массы.
Если p1 = 20 МПа, L/h = 100, то $\alpha \approx {{10}^{{ - 4}}} \times {{10}^{4}} \approx 1$, μ = 8.1. По модели несжимаемой жидкости в случае воды имеется только снижение собственной частоты. Это известный результат [1–3], однако учет влияния давления вносит некоторое изменение частоты.
Общая оценка рассматриваемых эффектов состоит в том, что при α > μ преобладает повышающее частоту влияние давления среды, а при α < μ – понижающее влияние плотности (или присоединенной массы). Через входные параметры эти неравенства имеют вид
Первый случай реализуется для весьма тонких пластин из материала с малым модулем упругости и при предельно высоком давлении в контактирующей среде. Второй случай всегда реализуется при невысоких давлениях в плотной среде.
3. Сжимаемая среда. По модели сжимаемой среды вместо уравнений (2.1) имеем [1–3]
(3.1)
$\frac{{{{\partial }^{2}}{{\varphi }_{{1,2}}}}}{{\partial {{x}^{2}}}} + \frac{{{{\partial }^{2}}{{\varphi }_{{1,2}}}}}{{\partial {{z}^{2}}}} - \frac{1}{{c_{{1,2}}^{2}}} \cdot \frac{{{{\partial }^{2}}{{\varphi }_{{1,2}}}}}{{\partial {{t}^{2}}}} = 0,\quad {{\bar {p}}_{{1,2}}} = - {{\rho }_{{1,2}}}\frac{{\partial {{\varphi }_{{1,2}}}}}{{\partial t}},\quad c_{{1,2}}^{2} = {{\kappa }_{{1,2}}}\frac{{{{p}_{{1,2}}}}}{{{{\rho }_{{1,2}}}}}$Рассмотрим частный случай одинаковых сред при одинаковых давлениях (ρ1 = ρ2, p1 = p2, c1 = c2). При функциях (2.7), (2.8)
(3.2)
$w = W\sin \beta x\sin \omega t,\quad {{\varphi }_{{1,2}}} = {{\Phi }_{{1,2}}}\left( z \right)\sin \beta x\cos \omega t$(3.3)
${{\Phi }_{{1,2}}} = {{A}_{{1,2}}}{{e}^{{kz}}} + {{B}_{{1,2}}}{{e}^{{ - kz}}},\quad {{k}^{2}} = {{\beta }^{2}} - \frac{{{{\omega }^{2}}}}{{c_{1}^{2}}}$Будем рассматривать случай k2 > 0. Обоснование этого условия приводится далее. Положив A2 = 0, B1 = 0 в соответствии с условиями (2.3), получаем частное решение
(3.4)
${{\varphi }_{1}} = {{A}_{1}}{{e}^{{kz}}}{\text{sin}}\beta x\cos \omega t,\,\,\,\,\,{{\varphi }_{2}} = {{B}_{2}}{{e}^{{ - kz}}}{\text{sin}}\beta x\cos \omega t$Как показано выше, при определении распределенной нагрузки q необходимо учитывать условия при z = ±h/2, а при определении ${{\bar {p}}_{1}}$, ${{\bar {p}}_{2}}$ на поверхностях пластины и удовлетворении условий (3.2) в линейной задаче вместо z = ±h/2 + w можно принять z = 0. Тогда из условий (3.4) A1 = ωW/k, B2 = – ωW/k и
Правая часть уравнения (1.1) равна (ρ1 = ρ2, p1 = p2)
(3.5)
$q = \left( {{{p}_{0}} + {{p}_{1}}} \right)h\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}} + {{\bar {p}}_{1}} - {{\bar {p}}_{2}} = {{p}_{1}}h\frac{{{{\partial }^{2}}w}}{{\partial {{x}^{2}}}} + \frac{{2{{{{\rho }}}_{1}}{{{{\omega }}}^{2}}}}{k}W\sin \beta x\sin \omega t$Подставив в (1.1) выражение w и q из (3.2) и (3.5), получим для p0 = 0
(3.6)
$\begin{gathered} D{{\beta }^{4}} - \rho h{{{{\omega }}}^{2}} + {{p}_{1}}h{{{{\beta }}}^{2}} - \frac{{2{{{{\rho }}}_{1}}{{{{\omega }}}^{2}}}}{k} = 0 \\ {{\omega }}_{0}^{2} = \frac{{D{{\beta }^{4}}}}{{\rho h}},\quad {{k}^{2}} = {{\beta }^{2}} - \frac{{{{\omega }^{2}}}}{{c_{1}^{2}}},\quad {{\beta }} = \frac{\pi }{L} \\ \end{gathered} $Из (3.6) следует
(3.7)
${\text{1}} - Z + \alpha - \frac{{\mu Z}}{{\sqrt {1 - \eta {\text{Z}}} }} = 0,\quad \alpha = \frac{{{{p}_{1}}{{\beta }^{2}}}}{{\rho {{\omega }}_{0}^{2}}},\quad {{\mu }} = \frac{{2{{{{\rho }}}_{1}}}}{{{{\rho }}h{{\beta }}}},\quad \eta = \frac{{{{\omega }}_{0}^{2}}}{{c_{1}^{2}{{\beta }^{2}}}},\quad Z = \frac{{{{\omega }^{2}}}}{{\omega _{0}^{2}}}$Рассмотрим случай $1 - \eta {\text{Z}} > 0$. Частотное уравнение (3.7) представим в виде кубического
(3.8)
$\begin{gathered} {{Z}^{3}} + {{b}_{1}}{{Z}^{2}} + {{b}_{2}}Z - {{b}_{3}} = 0 \\ {{b}_{1}} = - 2\delta - \frac{1}{\eta } + \frac{{{{\mu }^{2}}}}{\eta },\quad {{b}_{2}} = {{\delta }^{2}} + \frac{{2\delta }}{\eta },\quad {{b}_{3}} = - \frac{{{{\delta }^{2}}}}{\eta },\quad \delta = 1 + \alpha \\ \end{gathered} $Низшая собственная частота колебаний равна ${{f}_{1}} = {\omega \mathord{\left/ {\vphantom {\omega {2\pi ,\quad }}} \right. \kern-0em} {2\pi ,\quad }}\omega = {{\omega }_{0}}\sqrt Z .$
При E = 76 × 103 МПа, ν = 037, ρ = 10500 кг/м3, h = 20 нм, L = 2000 нм, ${{\kappa }_{{1,2}}}$ = 1.4, атмосферном давлении pa = 0.1 МПа, плотности воздуха ρ1a = 1.2928 кг/м3, p1 = 2 МПа численное решение уравнения (3.7) дает корень: Z = 1.10268. Соответствующая частота равна f1 = 6.894 МГц. Решение кубического уравнения (3.8), естественно, дает такой же корень: Z = 1.10268.
Для проверки выполнения условия k2 > 0 учтем полученное выражение $\omega = {{\omega }_{0}}\sqrt Z $, где ω0 дается в (3.6). В рассмотренном примере Z ≈ 1.1, т.е. имеет место преобладание влияния давления воздуха над его плотностью. Условие k2 > 0 или
Приведем приближенное решение уравнения (3.7). Примем Z = 1 – a, a3 ≪ 1. Подставим это выражение в (3.7) и приравняем нулю, пренебрегая членом, содержащим a3,
(3.9)
$\begin{gathered} {{d}_{1}}{{a}^{2}} + {{d}_{2}}a + {{d}_{3}} = 0,\quad {{d}_{1}} = 2\delta \eta - 3\eta + 1 - {{\mu }^{2}} \\ {{d}_{2}} = ({{\delta }^{2}} - 4\delta + 3)\eta + 2{{\mu }^{2}} + 2\delta - 2,\quad {{d}_{3}} = {{\left( {1 - \delta } \right)}^{2}}\left( {1 + \eta } \right) - {{\mu }^{2}} \\ \end{gathered} $Из (3.9) находим
Если δ = 1, то d1 = 1 – η – η2, d2 = 2µ2, d3 = – µ2.
Если пренебречь членом, содержащим a2, то получим a = –d3/d2.
Результаты расчета низшей собственной частоты изгибных колебаний пластинки по приближенным формулам (3.9) и a = –d3/d2 в соответствии с условиями на величину a сведены в табл. Для воздуха в рассматриваемом диапазоне давлений формула a = –d3/d2 дает погрешность не более 9%.
Также приведем решение уравнения (3.7) в виде
(3.10)
$Z = \frac{\delta }{{1 + {{\mu }}}}[{{C}_{1}} + {{С}_{2}}\eta \mu \delta + {{С}_{3}}{{\eta }^{2}}\mu {{\delta }^{2}}]$Для η ≪ 1 представим $\sqrt {1 - \eta {\text{Z}}} $ как
(3.11)
$\sqrt {1 - \eta {\text{Z}}} \approx 1 - \frac{1}{2}\eta Z \approx \frac{1}{2}\frac{{\eta \delta \left( {{{C}_{1}} + {{C}_{1}}\mu + {{C}_{2}}\delta } \right)}}{{{{{\left( {1 + \mu } \right)}}^{2}}}}$Подставляя выражения (3.10), (3.11) в уравнение (3.7), разлагая полученное соотношение в ряд по степеням δ и приравнивая нулю коэффициенты при δ, δ2, δ3, получим систему трех линейных уравнений, решение которой записывается
Из приведенных расчетов видно, что внешнее давление и наличие газа оказывает существенное влияние на частоты колебаний пластины. Также отметим высокую точность приближенной формулы (3.9) и решения в виде (3.10).
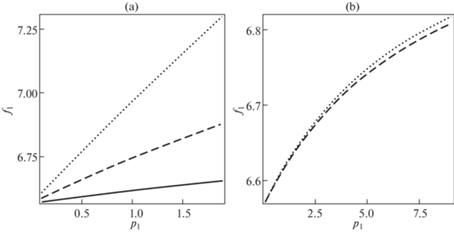
На рис. 2, а приводится зависимость первой частоты изгибных колебаний пластинки от давления для разных газов. Из рис. 2, а видно, что с ростом давления собственная частота колебаний возрастает. А с увеличением плотности газа происходит уменьшение собственной частоты изгибных колебаний. На рис. 2, b приводится зависимость первой частоты изгибных колебаний пластинки от давления по формулам для несжимаемой и сжимаемой жидкостей для двуокиси углерода. Из рис. 2, b видно, что частоты по модели несжимаемой жидкости выше частот по модели для сжимаемой жидкости из-за увеличения плотности, причем с ростом давления разность частот колебаний возрастает.
Рис. 2.
Зависимость первой частоты изгибных колебаний пластинки f1 (MHz) от давления p1 (MPa): (а) для разных газов: ρ1 = 0.1785 (гелий), 1.2928 (воздух), 1.9768 (двуокись углерода) kg/m3 (пунктирная, штриховая, сплошная линии соответственно); (b) по формулам для несжимаемой (2.14) и сжимаемой (3.7) жидкостей для двуокиси углерода ρ1 = 1.9768 kg/m3 (пунктирная, штриховая линии соответственно).
5. Заключение. Хорошо известно из литературы (например, [1–3]), что собственные частоты изгибных колебаний пластины при ее контакте с жидкостью значительно снижаются. Это объясняется влиянием присоединенной массы жидкости. Установлено [15, 16], что учет разности площадей противоположных поверхностей пластины, образующейся при ее изгибе, может оказывать повышающее влияние на собственные частоты. Учет этого эффекта приводит к появлению распределенной поперечной силы, равной произведению кривизны срединной поверхности и среднего давления на поверхности пластины.
Одновременное влияние указанных факторов на низшую частоту колебаний в случае несжимаемой жидкости зависит от отношения среднего давления к модулю упругости материала, плотностей материала и жидкости и отношения длины пластины к ее толщине. Для реальных параметров характерно превалирующее влияние плотности среды над давлением в ней. Однако давление может оказывать заметное влияние на результат.
Для сжимаемой жидкости влияние носит более сложный характер, так как присоединенная масса зависит от скорости звука и от самой частоты колебаний. Кроме того, давление и плотность газовой среды не являются независимыми.
Влияние контактирующей среды на низшую частоту колебаний является значительным для весьма тонких пластин и пленок с низким модулем упругости. Учет его необходим особенно в случае элементов микро- и наноразмерных толщин.
С ростом давления собственная частота колебаний возрастает. В случае легких газов (водород, гелий) влияние давления может превалировать над их плотностью. Эти результаты могут быть использованы при моделировании колебаний пластинок, контактирующих с жидкостью и газом, в том числе микро- и наноразмеров.
Работа проведена в порядке выполнения государственного задания (№ 0246-2019-0088).
Таблица 1.
Первая собственная частота изгибных колебаний пластинки, p1, MPa, f1, MHz
| p1 | 0.1 | 0.1 | 2 | 2 |
| α | 0.0138 | 0.0138 | 0.2761 | 0.2761 |
| μ | 0 | 0.0078 | 0 | 0.1568 |
| a | –0.0138 | –0.0059 | –0.2754 | –0.1027 |
| Z (3.7) | 1.0138 | 1.0059 | 1.2761 | 1.1027 |
| f1 (3.7) | 6.6108 | 6.5850 | 7.4170 | 6.8945 |
| f1 (a3 = 0) (3.9) | 6.6108 | 6.5850 | 7.4150 | 6.8946 |
| f1 (a2 = 0) | 6.5663 | 6.5661 | 6.8106 | 6.7363 |
| f1 (3.10) | 6.6108 | 6.5850 | 7.4171 | 6.8945 |
Список литературы
Гонткевич В.С. Собственные колебания оболочек в жидкости. Киев: Наукова думка, 1964. 102 с.
Ильгамов М.А. Колебания упругих оболочек, содержащих жидкость и газ. М.: Наука, 1969. 180 с.
Попов A.JI., Чернышев Г.Н. Механика звукоизлучения пластин и оболочек. М.: Физматлит. 1994. 208 с.
Нестеров С.В. Изгибные колебания квадратной пластины, защемленной по контуру // Изв. РАН. Механика твердого тела. 2011. № 6. С. 159–165.
Денисов С.Л., Копьев В.Ф., Медведский А.Л., Остриков Н.Н. Исследования проблем долговечности ортотропных полигональных пластин при широкополосном акустическом воздействии с учетом эффектов излучения // Изв. РАН. Механика твердого тела. 2020. № 5. С. 138–150. https://doi.org/10.31857/S0572329920030058
O’Connell A.D., Hofheinz M., Ansmann M. et al. Quantum ground state and single-phonon control of a mechanical resonator // Nature. 2010. V. 464. P. 697–703. https://doi.org/10.1038/nature08967
Burg T.P., Godin M., Knudsen S.M. et al. Weighing of biomolecules, single cells and single nanoparticles in fluid // Nature. 2007. V. 446. P. 1066–1069. https://doi.org/10.1038/nature05741
Husale S., Persson H.H.J., Sahin O. DNA nanomechanics allows direct digital detection of complementary DNA and microRNA targets // Nature. 2009. V. 462. P. 1075–1078. https://doi.org/10.1038/nature08626
Raman A., Melcher J., Tung R. Cantilever dynamics in atomic force microscopy // Nano Today. 2008. V. 3. № 1–2. P. 20–27. https://doi.org/10.1016/S1748-0132(08)70012-4
Eom K., Park H. S., Yoon D. S., Kwon T. Nanomechanical resonators and their applications in biological/chemical detection: Nanomechanics principles // Physics Reports. 2011. V. 503. № 4–5. P. 115–163. https://doi.org/10.1016/j.physrep.2011.03.002
Stassi S., Marini M., Allione M. et al. Nanomechanical DNA resonators for sensing and structural analysis of DNA-ligand complexes // Nature Communications. 2019. V. 10. P. 1690. https://doi.org/10.1038/s41467-019-09612-0
Jaber N., Hafiz M.A.A., Kazmi S.N.R. et al. Efficient excitation of micro/nano resonators and their higher order modes // Scientific Reports. 2019. V. 9. P. 319. https://doi.org/10.1038/s41598-018-36482-1
SoltanRezaee M., Bodaghi M. Simulation of an electrically actuated cantilever as a novel biosensor // Scientific Reports. 2020. V. 10. P. 3385. https://doi.org/10.1038/s41598-020-60296-9
Tavakolian F., Farrokhabadi A., SoltanRezaee M., Rahmanian S. Dynamic pull-in of thermal cantilever nanoswitches subjected to dispersion and axial forces using nonlocal elasticity theory // Microsystem Technologies. 2019. V. 25. № 3. P. 19–30. https://doi.org/10.1007/s00542-018-3926-y
Ильгамов М.А. Влияние давления окружающей среды на изгиб тонкой пластины и пленки // ДАН. 2017. Т. 476. № 4. С. 402–405.
Ильгамов М.А. Влияние поверхностных эффектов на изгиб и колебания нанопленок // ФТТ. 2019. Т. 61. № 10. С. 1825–1830.
Ilgamov M.A., Khakimov A.G. Influence of pressure on the frequency spectrum of micro and nanoresonators on hinged supports // J. Appl. Comput. Mech. 2021. V. 7. № 2. P. 977–983. https://doi.org/10.22055/JACM.2021.36470.2848
Timoshenko S.P., Young D.H., Weaver W. Vibration Problems in Engineering. New York: John Wiley & Sons. 1974.
Дополнительные материалы отсутствуют.
Инструменты
Известия РАН. Механика твердого тела