

Прикладная математика и механика, 2022, T. 86, № 2, стр. 169-185
Об орбитальной устойчивости маятниковых движений в приближенной задаче динамики волчка Ковалевской с вибрирующей точкой подвеса
1 Московский авиационный институт (национальный исследовательский университет)
Москва, Россия
* E-mail: tuzemec1@rambler.ru
Поступила в редакцию 25.04.2021
После доработки 07.12.2021
Принята к публикации 23.12.2021
- EDN: UHDIRX
- DOI: 10.31857/S0032823522020035
Аннотация
Исследуется движение тяжелого твердого тела, одна из точек которого (точка подвеса) совершает высокочастотные горизонтальные вибрации, а геометрия масс тела для этой точки отвечает случаю С.В. Ковалевской. Задача рассматривается в рамках приближенной автономной системы дифференциальных уравнений, записанных в гамильтоновой форме. Изучаются частные движения тела – маятниковые колебания и вращения вокруг горизонтально расположенной главной оси инерции, являющейся либо осью динамической симметрии, либо осью из экваториальной плоскости инерции. При этом радиус-вектор центра масс тела относительно точки подвеса совершает маятниковые движения в вертикальной плоскости, содержащей ось вибрации (продольные движения) или перпендикулярной этой оси (поперечные движения). В данной работе завершен начатый ранее линейный анализ орбитальной устойчивости описанных маятниковых движений, проводимый с учетом пространственных возмущений. Эта задача сведена к эквивалентной задаче об устойчивости тривиального равновесия редуцированной неавтономной системы с двумя степенями свободы. В областях устойчивости в линейном приближении проведен подробный нелинейный анализ орбитальной устойчивости. Проверены критерии устойчивости для большинства (в смысле меры Лебега) начальных условий, критерии формальной устойчивости, а также рассмотрены случаи резонансов четвертого порядка.
1. Введение. Маятниковые движения тяжелого твердого тела с неподвижной точкой впервые описаны Б.К. Млодзеевским в 1894 г. [1], где было показано, что такие движения может совершать тело с центром масс в главной плоскости инерции; осью вращения является главная ось инерции, перпендикулярная этой плоскости. Позднее рассматривались вопросы об устойчивости малых маятниковых колебаний [2], а также плоских и близких к ним вращений тела с центром масс на главной оси инерции [3]. Маятниковые движения изучены для тел с геометрией масс, отвечающей случаю Ковалевской [4, 5], Горячева–Чаплыгина [6], Бобылева–Стеклова [7], а также динамически симметричного тела [8].
Теоретический и прикладной интерес представляет изучение влияния высокочастотных вибраций на движение твердого тела или системы твердых тел. Первые работы в данной области опубликованы А. Стефенсоном [9], показавшим возможность стабилизации верхнего положения математического маятника за счет вертикальных вибраций точки подвеса. Подробная библиография по динамике маятниковых систем при наличии вибраций содержится в монографиях [10, 11].
В работе А.П. Маркеева [12] были получены приближенные автономные уравнения движения тела с произвольной геометрией масс в случае произвольных высокочастотных периодических или условно-периодических вибраций точки подвеса в трехмерном пространстве. В этих уравнениях влияние вибраций точки подвеса эквивалентно наложению дополнительного (стационарного) вибрационного потенциального поля. В рамках указанной системы уравнений проведен ряд исследований частных случаев движений твердого тела с вибрирующей точкой подвеса для различных случаев геометрии масс тела и различных случаев вибраций [12–18].
Были описаны [16] (в рамках приближенной автономной системы) маятниковые движения волчка Лагранжа с вибрирующей точкой подвеса для широкого спектра вибраций, включающего и вибрации вдоль горизонтальной прямой. Была исследована орбитальная устойчивость этих движений. В этой статье угол собственного вращения волчка относительно оси симметрии являлся циклической координатой, и потому исследование устойчивости проведено по отношению к отклонению плоскости маятниковых движений волчка.
Другим классическим случаем динамики твердого тела с неподвижной точкой является случай С.В. Ковалевской [19]. В частности, было проведено [4, 5] исследование устойчивости маятниковых движений волчка Ковалевской с неподвижной точкой подвеса по отношению к возмущениям угла собственного вращения вокруг главной оси, содержащей центр масс тела.
Представляет интерес (в рамках приближенной автономной системы) изучить влияние вибраций точки подвеса волчка Ковалевской на устойчивость его маятниковых движений. В случае вибраций точки подвеса вдоль горизонтальной прямой система допускает как маятниковые движения, аналогичные таким движениям тела с неподвижной точкой, так и маятниковые движения других типов. Изучение этих движений начато [18] с линейного анализа их орбитальной устойчивости (по отношению к пространственным возмущениям).
Отметим, что первый интеграл, имеющий место в задаче о движении волчка Ковалевской вокруг неподвижной точки, исчезает при наличии вибраций точки подвеса. В такой постановке задачи отсутствует и циклическая координата (угол прецессии). При этом из-за появления выделенного направления в пространстве, определяемого направлением оси вибраций, возникает возможность стабилизации маятниковых движений, неустойчивых в случае неподвижной точки подвеса.
Целью данной работы является завершение линейного анализа орбитальной устойчивости маятниковых движений волчка Ковалевской с вибрирующим подвесом, а также проведение подробного нелинейного анализа их орбитальной устойчивости.
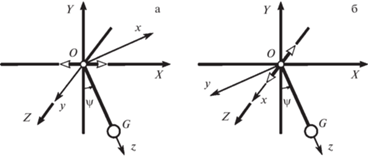
2. Постановка задачи. Рассмотрим движение тяжелого твердого тела, точка $O$ которого (называемая далее точкой подвеса) совершает периодическое движение вдоль фиксированной горизонтальной прямой с частотой $\Omega $ по закону $O{\text{'}}O = \xi (t)$ относительно фиксированной точки $O{\text{'}}$. Среднее значение $\left\langle {\xi (t)} \right\rangle $ за период считаем равным нулю.
Введем поступательно движущуюся систему координат $OXYZ$, ось $OY$ которой направлена вертикально вверх, а вибрации происходят вдоль оси $OX$ (или в отдельно оговоренном случае – вдоль оси $OZ$). Введем связанную с телом систему координат $Oxyz$ с осями, направленными вдоль главных осей инерции тела для точки $O$. Главные моменты инерции тела для точки $O$ обозначим через $A$, $B$ и $C$ и свяжем соотношениями, отвечающими волчку Ковалевской
Пусть центр масс $G$ волчка лежит на оси $Oz$, и $OG = {{z}_{G}}$, а масса тела – $m$. Ориентацию системы $Oxyz$ относительно $OXYZ$ зададим углами Эйлера $\psi $, $\theta $ и $\varphi $.
Будем считать, что наибольшее отклонение ${{h}_{*}}$ точки подвеса от точки $O{\text{'}}$ мало по сравнению с приведенной длиной тела $l = B{\text{/}}(m{{z}_{G}})$, а частота вибраций точки подвеса $\Omega $ велика по отношению к характерной частоте ${{\omega }_{*}} = \sqrt {g{\text{/}}l} $. Введем малый параметр ${{\varepsilon }^{2}} = {{h}_{*}}{\text{/}}l$ и будем считать, что ${{\omega }_{*}}\sim {{\varepsilon }^{2}}\Omega $ (т. е. ${{h}_{*}}\Omega \sim l{{\omega }_{*}}$).
Движение тела опишем с помощью канонических уравнений Гамильтона. Методами теории возмущений можно привести функцию Гамильтона к виду, главная часть которой автономна. Впервые такое преобразование проведено для уравнений Эйлера–Пуассона [12], а приведение гамильтониана к автономному виду описано в монографии [10]. Оставляя за переменными прежние обозначения, запишем приближенный автономный гамильтониан в виде
(2.1)
$\begin{gathered} \hat {H} = \frac{{\left( {{{{\sin }}^{2}}\varphi + 2{{{\cos }}^{2}}\varphi } \right)P_{2}^{2}}}{2} + \frac{{\sin \varphi \cos \varphi \left( {{{P}_{1}} - {{P}_{3}}\cos \theta } \right){{P}_{2}}}}{{\sin \theta }} + \\ + \;\frac{{P_{3}^{2}}}{2} + \frac{{\left( {{{{\cos }}^{2}}\varphi + 2{{{\sin }}^{2}}\varphi } \right){{{\left( {{{P}_{1}} - {{P}_{3}}\cos \theta } \right)}}^{2}}}}{{2{{{\sin }}^{2}}\theta }} - \cos \psi \sin \theta + {{{\hat {\Pi }}}_{\nu }} \\ \end{gathered} $(2.2)
$\begin{gathered} {{{\hat {\Pi }}}_{\nu }} = \frac{\alpha }{2}\left( {2{{{\left( {\cos \psi \sin \varphi + \sin \psi \cos \varphi \cos \theta } \right)}}^{2}} + } \right. \\ + \;\left. {{{{\left( {\cos \psi \cos \varphi - \sin \psi \sin \varphi \cos \theta } \right)}}^{2}}} \right), \\ \end{gathered} $Система с гамильтонианом (2.1), (2.2) имеет частные решения, при которых главная ось $Oz$ (или, что то же, радиус-вектор ${\mathbf{OG}}$) совершает маятниковые движения в фиксированной вертикальной плоскости вокруг одной из двух других главных осей инерции, занимающей фиксированное горизонтальное положение. При этом ось вибрации либо лежит в плоскости этих движений, либо перпендикулярна ей. В первом случае маятниковые движения будем называть продольными, во втором – поперечными.
Данная работа посвящена исследованию двух типов движения: продольных движений, при которых осью вращения является ось $Oy$ из экваториальной плоскости инерции (рис. 1а), и поперечных движений, при которых осью вращения является ось динамической симметрии $Ox$. Другие два типа движения в данной работе не рассматриваются.
Указанным продольным движениям отвечает частное решение системы (2.1), (2.2), задаваемое соотношениями
(2.3)
$\theta = {\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2},\quad \varphi = 0,\quad {{P}_{2}} = 0,\quad {{P}_{3}} = 0,$Для поперечных маятниковых движений ось $Oz$ может совпасть с осью $OZ$. Чтобы избежать вырождения, при исследовании таких движений перенаправим оси системы координат $OXYZ$ таким образом, чтобы вибрации точки подвеса происходили вдоль оси $OZ$. Гамильтониан приближенной системы запишется в виде (2.1), в котором вибрационный потенциал примет вид
(2.5)
${{\hat {\Pi }}_{\nu }} = \frac{\alpha }{2}\left( {2{{{\cos }}^{2}}\varphi + {{{\sin }}^{2}}\varphi } \right){{\sin }^{2}}\theta $Поперечным движениям отвечает частное решение системы (2.1), (2.5)
(2.6)
$\theta = {\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2},\quad \varphi = {\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2},\quad {{P}_{2}} = 0,\quad {{P}_{3}} = 0,$Ранее [18] было проведено исследование движений систем с гамильтонианами (2.4) и (2.7), а также линейный анализ орбитальной устойчивости описанных маятниковых движений по отношению к пространственным возмущениям.
Целью данной работы является завершение линейного анализа орбитальной устойчивости маятниковых движений системы с функцией Гамильтона (2.1), (2.2) и (2.1), (2.5), по отношению к пространственным возмущениям, а также выполнение подробного нелинейного исследования орбитальной устойчивости.
Отметим, что при отсутствии вибраций точки подвеса маятниковые движения тела могут совершаться в любой фиксированной вертикальной плоскости. В этом случае, вследствие имеющейся относительно вертикали симметрии силового поля (поля тяжести), в системе имеется циклическая координата, и по отношению к пространственным возмущениям маятниковые движения неустойчивы. При наличии горизонтальных вибраций точки подвеса указанная симметрия нарушается, и циклическая координата исчезает. Далее будет показано, что маятниковые движения могут быть устойчивыми и при наличии пространственных возмущений.
3. Маятниковые движения. Гамильтонианы (2.4) и (2.7) и соответствующие им системы уравнений, описывающие маятниковые движения, далее будем называть модельными.
Модельные системы имеют первые интегралы (интегралы энергии) вида ${{H}_{0}} = h = \operatorname{const} $, ${{H}_{{01}}} = h = \operatorname{const} $. На рис. 2а,б построены бифуркационные диаграммы в плоскости параметров $\alpha $, $h$ для модельных систем (2.4) и (2.7), соответственно, где отображены области, отвечающие разным типам маятниковых движений.
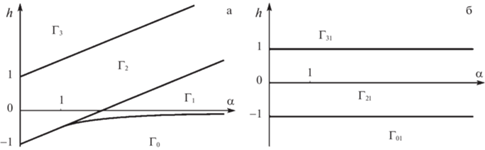
На рис. 2а области ${{\Gamma }_{0}}$, ${{\Gamma }_{1}}$, ${{\Gamma }_{2}}$ и ${{\Gamma }_{3}}$ с различным характером движения разделены прямыми $h = \pm 1 + {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. \kern-0em} 2}$ и участком гиперболы $2\alpha h = - 1$ при $\alpha > 1$. Точкам гиперболы $2\alpha h = - 1$ отвечает устойчивое боковое положение равновесия ${{\psi }_{*}} = \pm \arccos ({{\alpha }^{{ - 1}}})$. Точкам прямой $h = - 1 + {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. \kern-0em} 2}$ при $\alpha < 1$ отвечает устойчивое нижнее положение равновесия $\psi = 0$, а при $\alpha > 1$ – неустойчивое нижнее положение и асимптотическое движение. Прямая $h = 1 + {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. \kern-0em} 2}$ соответствует неустойчивому верхнему положению равновесия $\psi = \pi $ и асимптотическому движению. На рис. 2б прямой $h = - 1$ при всех $\alpha $ отвечает устойчивое нижнее положение равновесия, а прямой $h = 1$ отвечают неустойчивое верхнее равновесие и асимптотическое движение.
В областях ${{\Gamma }_{0}}$ и ${{\Gamma }_{{01}}}$ на рис. 2а и 2б движение невозможно. В области ${{\Gamma }_{1}}$ центр масс тела совершает колебания около бокового равновесия $\psi = {{\psi }_{*}}$. Областям ${{\Gamma }_{2}}$ и ${{\Gamma }_{{21}}}$ отвечают колебания центра масс около нижнего положения. В областях ${{\Gamma }_{3}}$ и ${{\Gamma }_{{31}}}$ происходят вращения волчка.
Для проведения интегрирования модельных систем разрешим интегралы энергии ${{H}_{0}} = h$ и ${{H}_{{01}}} = h$ относительно импульса ${{P}_{1}}$ и, используя уравнения Гамильтона, получим дифференциальные уравнения продольных и поперечных маятниковых движений, соответственно $\dot {\psi } = {{P}_{1}}(\psi ,h)$ = $ \pm \sqrt {2h + 2\cos \psi - \alpha {{{\cos }}^{2}}\psi } $ и $\dot {\psi } = 2{{P}_{1}}(\psi ,h)$ = $ \pm 2\sqrt {(h + \cos \psi )} $.
Полагая, что $u = \cos \psi $ ($\left| u \right| \leqslant 1$), перепишем эти уравнения в виде
(3.1)
$\dot {u} = \sqrt { - \alpha \left( {1 - {{u}^{2}}} \right)\left( {u - {{u}_{1}}} \right)\left( {u - {{u}_{2}}} \right)} ,\quad \dot {u} = 2\sqrt {(u + h)\left( {1 - {{u}^{2}}} \right)} $Здесь введены обозначения ${{u}_{{1,2}}} = {{\left( {1 \pm \sqrt {1 + 2\alpha h} } \right)} \mathord{\left/ {\vphantom {{\left( {1 \pm \sqrt {1 + 2\alpha h} } \right)} \alpha }} \right. \kern-0em} \alpha }$, (${{u}_{1}} < {{u}_{2}}$).
Интегрирование уравнений продольных и поперечных маятниковых движений (3.1) проведено в работе [18]. Для дальнейшего исследования введем обозначения
Здесь $\operatorname{K} \left( k \right)$ – полный эллиптический интеграл первого рода, $k$ – модуль эллиптического интеграла.
В областях колебаний и вращений модельных систем введем переменные действие-угол $I$, $w$.
Переменную действие введем по формуле
где интеграл берется по полному изменению угла $\psi $ за период колебания или вращения.Обращая соотношение (3.2), получим гамильтониан ${{H}_{0}} = h(I)$, записанный через переменную действие.
4. Гамильтониан возмущенного движения. Маятниковые движения (колебания и вращения) полных систем с тремя степенями свободы, для которых “маятниковая часть” записана через переменную действие, а остальные переменные принимают значения (2.3) или (2.6), примем за невозмущенное движение. Рассмотрим вопрос об орбитальной устойчивости этих движений.
В системе с гамильтонианом (2.1) введем возмущения по формулам $r = I - {{I}_{0}}$, ${{p}_{2}} = {{P}_{2}}$, ${{p}_{3}} = {{P}_{3}}$, ${{q}_{2}} = \theta - {\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2}$, ${{q}_{3}} = \varphi - {{\varphi }_{0}}$, где ${{I}_{0}}$ и ${{\varphi }_{0}}$ – значение переменной действие и угла $\varphi $ на невозмущенном движении. Выделим слагаемые возмущенного гамильтониана до четвертого порядка включительно по переменным ${{r}^{{1/2}}}$, ${{p}_{2}}$, ${{q}_{2}}$, ${{p}_{3}}$, ${{q}_{3}}$ и представим его в виде
(4.1)
$\begin{gathered} \hat {H} = {{H}_{2}} + {{H}_{4}} + {{O}_{6}},\quad {{H}_{2}} = {{\omega }_{0}}r + {{{\tilde {H}}}_{2}}\left( {{{p}_{2}},{{q}_{2}},{{p}_{3}},{{q}_{3}},w} \right) \\ {{H}_{4}} = \frac{1}{2}\frac{{\partial {{\omega }_{0}}}}{{\partial I}}{{r}^{2}} + \frac{{\partial {{{\tilde {H}}}_{2}}}}{{\partial I}}r + {{{\tilde {H}}}_{4}}\left( {{{p}_{2}},{{q}_{2}},{{p}_{3}},{{q}_{3}},w} \right) \\ \end{gathered} $Здесь ${{\omega }_{0}}$ – частота невозмущенного движения, а ${{O}_{6}}$ – $2\pi $-периодические слагаемые шестого и более высоких порядков по ${{r}^{{1/2}}}$, ${{p}_{2}}$, ${{q}_{2}}$, ${{p}_{3}}$, ${{q}_{3}}$. Указанные частные производные в выражении для ${{H}_{4}}$ вычисляются следующим образом
Для продольных маятниковых движений, описываемых гамильтонианом (2.4), функции ${{\tilde {H}}_{2}}$ и ${{\tilde {H}}_{4}}$ имеют вид
(4.2)
$\begin{gathered} {{{\tilde {H}}}_{2}} = p_{2}^{2} + {{P}_{1}}{{q}_{3}}{{p}_{2}} + \frac{{\cos \psi + 2\alpha {{{\sin }}^{2}}\psi + P_{1}^{2}}}{2}q_{2}^{2} + {{P}_{1}}{{p}_{3}}{{q}_{2}} - \\ - \;\frac{{\alpha \sin 2\psi }}{2}{{q}_{3}}{{q}_{2}} + \frac{{p_{3}^{2}}}{2} + \frac{{\left( {P_{1}^{2} + \alpha {{{\cos }}^{2}}\psi } \right)}}{2}q_{3}^{2} \\ \end{gathered} $(4.3)
$\begin{gathered} {{{\tilde {H}}}_{4}} = {{q}_{3}}{{p}_{3}}{{q}_{2}}{{p}_{2}} + \frac{5}{6}{{P}_{1}}{{p}_{3}}q_{2}^{3} + \frac{1}{2}{{P}_{1}}{{q}_{3}}{{p}_{2}}q_{2}^{2} - \frac{2}{3}{{P}_{1}}q_{3}^{3}{{p}_{2}} - \frac{1}{2}q_{3}^{2}p_{2}^{2} + {{P}_{1}}{{p}_{3}}q_{3}^{2}{{q}_{2}} + \\ + \;\frac{1}{2}p_{3}^{2}q_{2}^{2} + \frac{1}{{24}}\left( {8P_{1}^{2} - \cos \psi - 8\alpha {{{\sin }}^{2}}\psi } \right)q_{2}^{4} + \frac{1}{{12}}\alpha \sin 2\psi q_{2}^{3}{{q}_{3}} + \\ + \;\frac{1}{2}\left( {P_{1}^{2} - \alpha {{{\sin }}^{2}}\psi } \right)q_{2}^{2}q_{3}^{2} + \frac{1}{3}\alpha \sin 2\psi {{q}_{2}}q_{3}^{3} - \frac{1}{6}\left( {P_{1}^{2} + \alpha {{{\cos }}^{2}}\psi } \right)q_{3}^{4} \\ \end{gathered} $В случае, когда невозмущенное движение – поперечное маятниковое движение, описываемое системой с гамильтонианом (2.7), имеем
(4.4)
${{\tilde {H}}_{2}} = \frac{{p_{2}^{2}}}{2} - {{P}_{1}}{{q}_{3}}{{p}_{2}} + \frac{{p_{3}^{2}}}{2} + 2{{P}_{1}}{{q}_{2}}{{p}_{3}} + \frac{{2P_{1}^{2} - \alpha + \cos \psi }}{2}q_{2}^{2} + \frac{{\alpha - P_{1}^{2}}}{2}q_{3}^{2}$(4.5)
$\begin{gathered} {{{\tilde {H}}}_{4}} = \frac{1}{2}q_{3}^{2}p_{2}^{2} - {{q}_{3}}{{p}_{3}}{{q}_{2}}{{p}_{2}} + p_{3}^{2}q_{2}^{2} + \frac{2}{3}{{P}_{1}}q_{3}^{3}{{p}_{2}} - \frac{1}{2}{{P}_{1}}{{q}_{3}}{{p}_{2}}q_{2}^{2} + \frac{5}{3}{{P}_{1}}{{p}_{3}}q_{2}^{3} - \\ - \;{{P}_{1}}{{p}_{3}}q_{3}^{2}{{q}_{2}} + \frac{1}{6}\left( {P_{1}^{2} - \alpha } \right)q_{3}^{4} - \frac{1}{2}\left( {\alpha + P_{1}^{2}} \right)q_{3}^{2}q_{2}^{2} + \frac{1}{{24}}\left( {4\alpha + 16P_{1}^{2} - \cos \psi } \right)q_{2}^{4} \\ \end{gathered} $В выражениях (4.2)–(4.5) функции $\psi \left( w \right)$ и ${{P}_{1}}\left( w \right)$ отвечают невозмущенному движению.
На уровне энергии невозмущенного движения $\hat {H} = 0$ осуществим изоэнергетическую редукцию и, принимая в качестве новой независимой переменной величину $w$, рассмотрим неавтономную редуцированную систему с двумя степенями свободы с гамильтонианом
(4.6)
$K = {{K}_{2}} + {{K}_{4}} + {{\tilde {O}}_{6}},\quad {{K}_{2}} = \frac{1}{{{{\omega }_{0}}}}{{\tilde {H}}_{2}},\quad {{K}_{4}} = \frac{1}{{{{\omega }_{0}}}}\left[ {{{{\tilde {H}}}_{4}} - \frac{{\partial {{{\tilde {H}}}_{2}}}}{{\partial I}}\frac{{{{{\tilde {H}}}_{2}}}}{{{{\omega }_{0}}}} + \frac{1}{2}\frac{{\partial {{\omega }_{0}}}}{{\partial I}}\frac{{\tilde {H}_{2}^{2}}}{{\omega _{0}^{2}}}} \right]$Критерии орбитальной устойчивости тривиального положения равновесия системы с гамильтонианом (4.1) и описанной редуцированной системы с гамильтонианом (4.6) совпадают [20].
Замечание. Положения равновесия модельных систем (2.4) и (2.7) в рамках редуцированной неавтономной системы с двумя степенями свободы сохраняются. Для рассматриваемых движений устойчивость положений равновесия сохраняется и при пространственных возмущениях. В этом случае корни характеристических уравнений линеаризованных систем $ \pm i{{\Omega }_{{k,j}}}$ ($k$ – индекс области, $j = 1,2$) имеют вид
(4.7)
${{\Omega }_{{2,1}}} = \frac{{\sqrt 2 }}{{\sqrt {1 - \alpha } }},\quad {{\Omega }_{{2,2}}} = \frac{{\sqrt \alpha }}{{\sqrt {1 - \alpha } }},\quad {{\Omega }_{{21,1}}} = \frac{{\sqrt {1 - \alpha } }}{{\sqrt 2 }},\quad {{\Omega }_{{21,2}}} = \frac{{\sqrt \alpha }}{{\sqrt 2 }}$(4.8)
${{\Omega }_{{1,\left( {1,2} \right)}}} = \sqrt {\frac{{4{{\alpha }^{2}} - 1 \pm \sqrt {16{{\alpha }^{4}} - 16{{\alpha }^{2}} + 1} }}{{2\left( {{{\alpha }^{2}} - 1} \right)}}} $5. Критерии устойчивости маятниковых движений. В областях колебаний и вращений модельных систем рассмотрим сначала линеаризованную систему, описываемую гамильтонианом ${{K}_{2}}$. Пусть ${\mathbf{X}}(w)$ – матрица фундаментальных решений этой системы, удовлетворяющих начальным условиям ${\mathbf{X}}(0) = {{{\mathbf{E}}}_{4}}$, где ${{{\mathbf{E}}}_{4}}$ – единичная матрица четвертого порядка. Характеристическое уравнение линейной системы имеет вид
Здесь ${{a}_{1}}$ – след матрицы ${\mathbf{X}}(2\pi )$, ${{a}_{2}}$ – сумма ее главных миноров второго порядка.
Условия устойчивости в линейном приближении задаются неравенствами [21]
(5.2)
$ - 2 < {{a}_{2}} < 6,{\mkern 1mu} \quad 4\left( {{{a}_{2}} - 2} \right) < a_{1}^{2} < {{{{{\left( {{{a}_{2}} + 2} \right)}}^{2}}} \mathord{\left/ {\vphantom {{{{{\left( {{{a}_{2}} + 2} \right)}}^{2}}} 4}} \right. \kern-0em} 4}$В областях устойчивости в линейном приближении гамильтониан ${{K}_{2}}$ при помощи $2\pi $-периодической по $w$ линейной замены переменных ${{p}_{2}},{{q}_{2}},{{p}_{3}},{{q}_{3}}$ → $p_{2}^{'},q_{2}^{'},p_{3}^{'},q_{3}^{'}$ может быть приведен к нормальной форме
Границами областей устойчивости в линейном приближении внутри областей ${{\Gamma }_{1}}$, ${{\Gamma }_{2}}$, ${{\Gamma }_{{21}}}$, ${{\Gamma }_{3}}$ и ${{\Gamma }_{{31}}}$ являются кривые резонансов первого и второго порядков, задаваемых соотношениями
Согласно теореме Крейна–Гельфанда–Лидского [23], эти кривые в областях ${{\Gamma }_{1}}$, ${{\Gamma }_{2}}$ и ${{\Gamma }_{{21}}}$ рождаются из точек нижних границ этих областей, где величины ${{\Omega }_{{i,j}}}$, вычисляемые по формулам (4.7) и (4.8), связаны соответствующими резонансными соотношениями. Из некоторых таких точек рождаются пары кривых резонансов, заключающие между собой области неустойчивости (области параметрического резонанса), а из других рождается по одной резонансной кривой (и области неустойчивости нет).
В областях, где выполняются условия (5.2) устойчивости в линейном приближении, проводится нелинейный анализ устойчивости тривиального положения равновесия рассматриваемой неавтономной системы с двумя степенями свободы. Для этого при помощи близкой к тождественной замены переменных $p_{2}^{'},q_{2}^{'},p_{3}^{'},q_{3}^{'}$ → ${{\hat {p}}_{2}},{{\hat {q}}_{2}},{{\hat {p}}_{3}},{{\hat {q}}_{3}}$ требуется провести нормализацию преобразованного гамильтониана возмущенного движения в слагаемых четвертой степени относительно возмущений.
Если в системе отсутствуют резонансы четвертого порядка, то есть величины ${{\lambda }_{{1,2}}}$ не связаны соотношениями вида
(5.3)
${{k}_{1}}{{\lambda }_{1}} + {{k}_{2}}{{\lambda }_{2}} = N,\quad \left| {{{k}_{1}}} \right| + \left| {{{k}_{2}}} \right| = 4;\quad N = 0,1,2, \ldots ,$(5.4)
$\hat {K} = {{\lambda }_{1}}{{r}_{2}} + {{\lambda }_{2}}{{r}_{3}} + {{c}_{{20}}}r_{2}^{2} + {{c}_{{11}}}{{r}_{2}}{{r}_{3}} + {{c}_{{02}}}r_{3}^{2} + \tilde {K}({{r}_{2}},{{r}_{3}},{{\varphi }_{2}},{{\varphi }_{3}},w),$При отсутствии вырождения в членах четвертой степени нормализованного гамильтониана (5.4), то есть при выполнении условия
положение равновесия ${{r}_{2}} = {{r}_{3}} = 0$ неавтономной редуцированной системы с двумя степенями свободы устойчиво для большинства (в смысле меры Лебега) начальных условий [22]. Если при ${{r}_{2}} \geqslant 0$, ${{r}_{3}} \geqslant 0$ квадратичная форма является знакоопределенной, то положение равновесия формально устойчиво [22].Пусть в системе выполняется резонансное соотношение вида (5.3). В случае ${{k}_{1}}{{k}_{2}} < 0$ в системе имеется положительно определенный первый интеграл, и рассматриваемое положение равновесия формально устойчиво [22]. Если же ${{k}_{1}}{{k}_{2}} \geqslant 0$, то гамильтониан системы приводится к нормальной форме
(5.5)
$\begin{gathered} \hat {K} = {{\lambda }_{1}}{{r}_{2}} + {{\lambda }_{2}}{{r}_{3}} + {{c}_{{20}}}r_{2}^{2} + {{c}_{{11}}}{{r}_{2}}{{r}_{3}} + {{c}_{{02}}}r_{3}^{2} + {{a}_{{{{k}_{1}}{{k}_{2}}}}}\sin ({{k}_{1}}{{\lambda }_{1}} + {{k}_{2}}{{\lambda }_{2}} - Nw) + \\ + \;{{b}_{{{{k}_{1}}{{k}_{2}}}}}\cos ({{k}_{1}}{{\lambda }_{1}} + {{k}_{2}}{{\lambda }_{2}} - Nw) + \tilde {K}({{r}_{2}},{{r}_{3}},{{\varphi }_{2}},{{\varphi }_{3}},w) \\ \end{gathered} $(5.6)
$\left| {{{c}_{{20}}}k_{1}^{2} + {{c}_{{11}}}{{k}_{1}}{{k}_{2}} + {{c}_{{02}}}k_{2}^{2}} \right| > {{\left| {{{k}_{1}}} \right|}^{{{{k}_{1}}/2}}}{{\left| {{{k}_{2}}} \right|}^{{{{k}_{2}}/2}}}\sqrt {a_{{{{k}_{1}}{{k}_{2}}}}^{2} + b_{{{{k}_{1}}{{k}_{2}}}}^{2}} $Случаи вырождения $D = 0$, а также случаи кратного резонанса, требуют дополнительного исследования и в данной работе не рассматриваются.
Нормальную форму гамильтониана вида (5.4) или (5.5) можно получить, построив нормализованное отображение, порождаемое системой канонических уравнений движения системы с функцией Гамильтона $K$ за период $2\pi $ [20]. Построение отображения выполнено с использованием программного пакета MAPLE.
6. О результатах исследования устойчивости в линейном приближении. Для проверки условий (5.2) устойчивости в линейном приближении внутри областей ${{\Gamma }_{1}}$, ${{\Gamma }_{2}}$, ${{\Gamma }_{{21}}}$, ${{\Gamma }_{3}}$, и ${{\Gamma }_{{31}}}$ следует проинтегрировать уравнения движения неавтономной системы с гамильтонианом ${{K}_{2}}$ и определить коэффициенты характеристического уравнения (5.1). Интегрирование уравнений движения и вычисление необходимых коэффициентов проведено численно.
Исследование линейной орбитальной устойчивости рассматриваемых продольных и поперечных маятниковых движений волчка подробно проведено в работе [18], где в соответствующих областях в плоскости параметров $\alpha $ и $h$ построены диаграммы устойчивости. Полученные результаты показаны на рис. 3. На этих рисунках полужирными линиями отмечены границы областей, соответствующие рис. 2, тонкими линиями обозначены кривые резонансов первого и второго порядков. Серым цветом показаны области неустойчивости, области устойчивости в линейном приближении не закрашены. В областях с вертикальной штриховкой содержится счетное множество резонансных кривых первого и второго порядков.
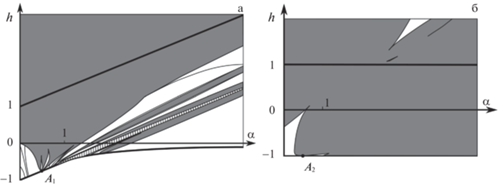
Картина устойчивости для продольных маятниковых движений показана на рис. 3а. В области ${{\Gamma }_{2}}$ колебаний около нижнего положения кривые резонансов первого и второго порядков берут начало в точках нижней границы области с абсциссами
В области ${{\Gamma }_{2}}$ имеются шесть существенных областей устойчивости. Четыре из них примыкают к точке ${{A}_{1}}$ ($\alpha = {1 \mathord{\left/ {\vphantom {1 2}} \right. \kern-0em} 2}$, $h = - {3 \mathord{\left/ {\vphantom {3 4}} \right. \kern-0em} 4}$), где имеет место кратный резонанс ${{\Omega }_{{2,1}}} = 2$, ${{\Omega }_{{2,2}}} = 1$. Первая из этих областей примыкает к границе $\alpha = 0$ и нижней границе области ${{\Gamma }_{2}}$ и имеет угловую точку (0; 0). Вторая и третья области устойчивости расположены между точкой кратного резонанса ${{A}_{1}}$ и угловыми точками (0.49252; –0.34305) и (0.64130; –0.17655), соответственно. Четвертая область устойчивости занимает участок нижней границы области ${{\Gamma }_{2}}$ при $\alpha \in (1{\text{/}}2;\;7{\text{/}}9)$ и заканчивается в угловой точке (1.22538; –0.05679). При $\alpha > 1$ имеются две обширные области устойчивости в линейном приближении, расширяющиеся с увеличением значения $\alpha $. На верхней границе большей из этих областей находится угловая точка (2.77955; 1.25049). Вблизи точки с абсциссой $\alpha = 1$ на нижней границе области ${{\Gamma }_{2}}$ находится счетное множество точек, порождающих резонансные кривые. Эти кривые ограничены заштрихованной областью около нижней границы ${{\Gamma }_{2}}$.
В области ${{\Gamma }_{1}}$ колебаний в окрестности бокового положения равновесия кривые резонансов первого и второго порядков выходят из точек нижней границы области, абсциссы которых
Бóльшую часть области ${{\Gamma }_{1}}$ занимает примыкающая к ее нижней границе область устойчивости в линейном приближении. Эта область ограничена сверху областью неустойчивости, выходящей из точки нижней границы области ${{\Gamma }_{1}}$ с абсциссой α = = ${{\sqrt {375 + 30\sqrt {145} } } \mathord{\left/ {\vphantom {{\sqrt {375 + 30\sqrt {145} } } {15}}} \right. \kern-0em} {15}}$ ≈ 1.80892. Над этой областью неустойчивости в окрестности верхней границы области ${{\Gamma }_{1}}$ располагается заштрихованная область, где, как и в области ${{\Gamma }_{2}}$, располагается счетное множество резонансных кривых.
В области вращений ${{\Gamma }_{3}}$ не обнаружено областей орбитальной устойчивости.
Диаграмма устойчивости поперечных маятниковых движений представлена на рис. 3б. В области ${{\Gamma }_{{21}}}$ колебаний около нижнего положения равновесия кривые резонансов первого и второго порядков выходят из точек нижней границы области с абсциссами
В этой области находятся две области устойчивости (рис. 3б), примыкающие к нижней границе ${{\Gamma }_{{21}}}$ левее и правее точки кратного резонанса ${{A}_{2}}$ ($\alpha = 1{\text{/}}2$, $h = - 1$; ${{\Omega }_{{21,1}}} = {{\Omega }_{{21,2}}} = 1{\text{/}}2$). Верхняя граница левой из этих областей заключена между точками (0; –0.37233) и (0.66882; 0.43844). Область устойчивости правее точки ${{A}_{2}}$ имеет угловую точку (1.15900; –0.37413).
В области вращений ${{\Gamma }_{{31}}}$ в рассматриваемом диапазоне параметров обнаружены три области устойчивости в линейном приближении. Наибольшая из них берет начало в точке (2.72745; 2.68839) и расширяется с ростом $h$. Две малые области устойчивости представляют собой криволинейный треугольник с угловыми точками (2.83023; 2.53740), (2.67780; 2.40480) и (2.70412; 2.41939), и тонкую полосу с угловой точкой (3.78114; 3.53085) (заключенную при $h = 4$ между точками с абсциссами α = 4.22712 и α = 4.22736).
Таким образом, для описанных маятниковых движений существуют области линейной орбитальной устойчивости по отношению к рассматриваемым в работе пространственным возмущениям. Этот результат отличает данную задачу от аналогичной задачи в случае неподвижной точки подвеса тела, когда устойчивость при наличии пространственных возмущений невозможна.
Результаты данного исследования в предельном случае отсутствия вибраций соответствуют выводам [4, 5]. В этих работах было получено, что маятниковые колебания волчка Ковалевской как вокруг оси динамической симметрии, так и вокруг оси из экваториальной плоскости орбитально устойчивы по отношению к возмущению угла собственного вращения, если амплитуда этих колебаний меньше значения ${\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2}$. Этим колебаниям на диаграммах рис. 1а и б отвечают отрезки $\alpha = 0$, $ - 1 < h < 1$. На рис. 1а область устойчивости колебаний при стремлении интенсивности вибраций к нулю сходится к отрезку $h \in \left[ { - 1;\;0} \right]$, что отвечает колебаниям с амплитудой до ${\pi \mathord{\left/ {\vphantom {\pi 2}} \right. \kern-0em} 2}$. На рис. 1б область устойчивости колебаний сходится к отрезку $h \in \left[ { - 1;\; - {\kern 1pt} 0.37233} \right]$, но при численном исследовании самой границы $\alpha = 0$ получаем, что условия (5.2) выполняются со знаком равенства при $h \in \left[ { - 1;\;0} \right]$, а при $h > 0$ одно их этих условий выполняется с обратным знаком, что также отвечает результатам [4, 5].
7. Нелинейный анализ устойчивости маятниковых движений. Результаты нелинейного анализа устойчивости маятниковых движений, основанные на критериях из параграфа 4, представим на рис. 4–6. На этих диаграммах полужирными линиями показаны кривые резонансов первого и второго порядков, часть которых является границами областей устойчивости в линейном приближении, а остальные кривые разделяют эти области на подобласти ${{g}_{i}}$ ($i = 1\; \ldots \;16$). Кривые резонансов четвертого порядка, соответствующие условию ${{k}_{1}}{{k}_{2}} < 0$, отображены точечными линиями, резонансные кривые с ${{k}_{1}}{{k}_{2}} \geqslant 0$ показаны сплошными тонкими линиями. Пунктирные линии – кривые вырождения, на которых имеем $D = 0$.
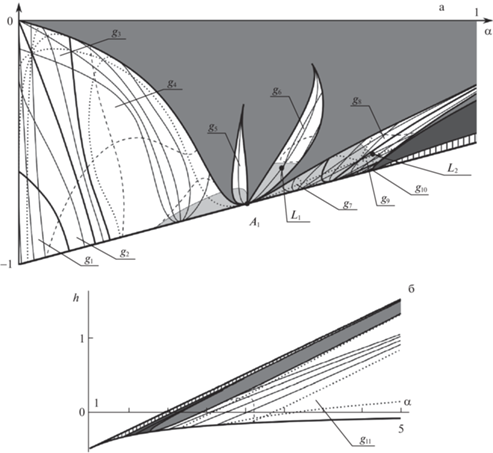
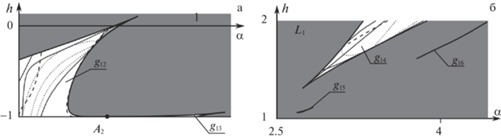
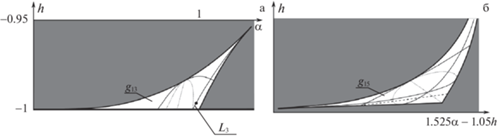
В незакрашенных областях для маятниковых движений выполняются условия формальной устойчивости, а в областях, закрашенных светло-серым цветом, эти условия нарушаются. В заштрихованной области содержится счетное множество кривых резонансов четвертого порядка; на них исследование не проводилось. В темно-серых областях содержится конечное число резонансных кривых четвертого порядка, однако картина устойчивости здесь весьма сложна и в данной работе не описывается. Остановимся подробнее на результатах исследования.
7.1. Области продольных колебаний волчка около нижнего положения равновесия (рис. 4а). В области ${{\Gamma }_{2}}$ продольных колебаний около нижнего положения равновесия нелинейный анализ устойчивости проведен в областях линейной устойчивости, примыкающих к точке кратного резонанса ${{A}_{1}}$ и разделенных на подобласти ${{g}_{i}}$ ($i = 1 \ldots 10$).
Часть кривых резонансов четвертого порядка берут начало в точках нижней границы области ${{\Gamma }_{2}}$ (в силу громоздкости выражения для абсцисс точек и соответствующие резонансные соотношения не приводятся).
Кроме того, в исследуемых областях обнаружены четыре резонансные кривые, граничные точки которых лежат на других границах областей устойчивости: две кривые $2{{\lambda }_{1}} - 2{{\lambda }_{2}} = 3$ (области ${{g}_{2}}$, ${{g}_{3}}$ и ${{g}_{8}}$, ${{g}_{9}}$) и кривые $4{{\lambda }_{1}} = 9$ и $3{{\lambda }_{1}} + {{\lambda }_{2}} = 8$ (область ${{g}_{6}}$).
На кривых резонансов четвертого порядка ${{\lambda }_{1}} + 3{{\lambda }_{2}} = 5$ (область ${{g}_{6}}$) и $3{{\lambda }_{1}} + {{\lambda }_{2}} = 9$ (области ${{g}_{9}}$) обнаружены два малых участка неустойчивости, местоположение которых отмечено на рис. 4а точками ${{L}_{1}}$ и ${{L}_{2}}$. Участок ${{L}_{1}}$ заключен между точками (0.57520, –0.60225) и (0.57386, –0.60567), а участок ${{L}_{2}}$ – между (0.77345, –0.54603) и (0.77360, –0.54590). Вне этих участков на данных кривых, а также на остальных резонансных кривых выполняется условие устойчивости (5.6).
В рассматриваемой части плоскости параметров обнаружены пять кривых вырождения: три из них лежат в левой области устойчивости в линейном приближении (подобласти ${{g}_{1}}$, ${{g}_{2}}$, ${{g}_{3}}$ и ${{g}_{4}}$), и по одной лежит в правых областях (подобласти ${{g}_{6}}$ и ${{g}_{8}}$, ${{g}_{9}}$).
В большей части четырех исследуемых областей устойчивости в линейном приближении имеет место формальная устойчивость. Исключение составляют части этих областей, примыкающие к точке ${{A}_{1}}$ кратного резонанса, где условие формальной устойчивости нарушается. При этом граница этой части области в подобласти ${{g}_{9}}$ пересекает участок неустойчивости ${{L}_{2}}$ на резонансной кривой.
7.2. Область продольных колебаний волчка около бокового положения равновесия (рис. 4б). Для колебаний волчка в окрестности бокового положения равновесия нелинейный анализ устойчивости проведен для области ${{g}_{{11}}}$ устойчивости в линейном приближении при $\alpha < 5$. В этой части области обнаружено семь кривых резонансов четвертого порядка, выходящих из точек нижней границы области ${{\Gamma }_{1}}$ с абсциссами
На всех рассмотренных кривых резонансов четвертого порядка условия устойчивости (5.6) выполняются. Обнаружена одна кривая вырождения, лежащая между точками (3.11532, –0.15951) и (2.71379, 0.11436) на границах области. Условия формальной устойчивости выполняются во всей области ${{g}_{{11}}}$.
7.3. Области поперечных колебаний волчка около нижнего положения равновесия (рис. 5а). В области ${{\Gamma }_{{21}}}$ поперечных колебаний десять резонансных кривых берут начало на нижней границе области, абсциссы которых
Дополнительно в области устойчивости в линейном приближении ${{g}_{{12}}}$ найдены две резонансные кривые $4{{\lambda }_{1}} = 3$, граничные точки которых лежат на боковых и верхней границах области. На всех кривых резонансов четвертого порядка в этой области условия устойчивости (5.6) выполняются. Также в области ${{g}_{{12}}}$ обнаружены две кривые вырождения и область, в которой нарушаются условия формальной устойчивости. Эта область примыкает к верхней границе области ${{g}_{{12}}}$ вблизи верхней угловой точки. Ее граница заключена между точками (0.51562, –0.01612) и (0.60296, 0.05082), и вытягивается внутрь области устойчивости до точки (0.43111, –0.19137).
Область устойчивости ${{g}_{{13}}}$ в другом масштабе изображена на рис. 6а. В этой области найдена дополнительная резонансная кривая $4{{\lambda }_{2}} = 3$. На кривой резонанса $3{{\lambda }_{1}} + {{\lambda }_{2}}$ = 1 в области ${{g}_{{13}}}$ обнаружен участок неустойчивости, заключенный между точкой (49/50, –1) нижней границы области ${{\Gamma }_{{21}}}$ и точкой (0.99119, –0.99625), отмеченной жирной точкой ${{L}_{3}}$ на рис. 6а. Условия формальной устойчивости выполняются во всей области ${{g}_{{13}}}$, и кривые вырождения отсутствуют.
7.4. Области поперечных вращений волчка (рис. 5б). Картина устойчивости поперечных вращений в области ${{g}_{{14}}}$ показана на рис. 5б. Подробная картина для области ${{g}_{{15}}}$ представлена в другом масштабе и в осях $1.525\alpha - 1.05h$ и $h$ на рис. 6б, а узкая область ${{g}_{{16}}}$ отдельно не изображена.
На всех кривых резонансов четвертого порядка (по семь кривых в областях ${{g}_{{14}}}$ и ${{g}_{{15}}}$ и одна кривая в области ${{g}_{{16}}}$) критерии устойчивости (5.6) выполнены; условия формальной устойчивости выполняются во всех точках областей ${{g}_{{14}}}$, ${{g}_{{15}}}$ и ${{g}_{{16}}}$. В областях ${{g}_{{14}}}$ и ${{g}_{{15}}}$ обнаружены по одной кривой вырождения.
Заключение. В работе исследовано влияние вибраций точки подвеса вдоль горизонтальной прямой на вид и орбитальную устойчивость маятниковых движений волчка Ковалевской. Показано, что под действием вибраций точки подвеса тела, его маятниковые движения могут оставаться такими же, как и у тела с неподвижной точкой (поперечные движения), однако, с помощью вибраций можно получить и другие маятниковые движения тела (продольные движения).
При отсутствии вибраций точки подвеса маятниковые движения тела орбитально неустойчивы по отношению к пространственным возмущениям, но с помощью вибраций вдоль горизонтали можно добиться стабилизации некоторых маятниковых движений. В таких областях орбитальной устойчивости в линейном приближении проведен строгий нелинейный анализ устойчивости. Построены области выполнения условий формальной устойчивости и устойчивости для большинства (в смысле меры Лебега) начальных условий, а также проверены критерии устойчивости на кривых резонансов четвертого порядка.
Исследование выполнено в Московском авиационном институте (национальном исследовательском университете) за счет гранта Российского научного фонда (проект № 19-11-00116).
Список литературы
Млодзеевский Б.К. О перманентных осях в движении тяжелого твердого тела около неподвижной точки // Тр. отд. Физич. наук об-ва любителей естествознания, антропологии и этнографии. 1894. Т. 7. Вып. 1. С. 46–48.
Архангельский Ю.А. Об устойчивости движения тяжелого твердого тела, вокруг неподвижной точки в одном частном случае // ПММ. 1960. Т. 24. Вып. 2. С. 294–302.
Маркеев А.П. О плоских и близких к плоским вращениях тяжелого твердого тела вокруг неподвижной точки // Изв. АН СССР. МТТ. 1988. № 4. С. 29–36.
Маркеев А.П. Об устойчивости плоских движений твердого тела в случае Ковалевской // ПММ. 2001. Т. 65. Вып. 1. С. 51–58.
Маркеев А.П., Медведев С.В., Чеховская Т.Н. К задаче об устойчивости маятникообразных движений твердого тела в случае Ковалевской // Изв. РАН. МТТ. 2003. № 1. С. 3–9.
Бардин Б.С. К задаче об устойчивости маятникообразных движений твердого тела в случае Горячева–Чаплыгина // Изв. РАН. МТТ. 2007. № 2. С. 14–21.
Bardin B.S., Rudenko T.V., Savin A.A. On the orbital stability of planar periodic motions of a rigid body in the Bobylev–Steklov case // R.&C. Dyn. 2012. V. 17. № 6. P. 533–546.
Бардин Б.С., Савин А.А. Об орбитальной устойчивости маятниковых колебаний и вращений симметричного твердого тела с неподвижной точкой // Нелин. дин. 2012. Т. 8. № 2. С. 249–266.
Stephenson A. On a new type of dynamical stability // Mem. & Proc. Manchester Literary and Phil. Soc. 1908. V. 52. Pt. 2. № 8. P. 1–10.
Холостова О.В. Задачи динамики твердых тел с вибрирующим подвесом. М.; Ижевск: Ин-т компьют. исслед., 2016. 308 с.
Стрижак Т.Г. Методы исследования динамических систем типа “маятник”. Алма-Ата: Наука, 1981. 253 с.
Маркеев А.П. Об уравнениях приближенной теории движения твердого тела с вибрирующей точкой подвеса // ПММ. 2011. Т. 75. № 2. С. 193–203.
Холостова О.В. Об устойчивости равновесий твердого тела с вибрирующей точкой подвеса // Вестн. РУДН. Математика. Информатика. Физика. 2011. № 2. С. 111–122.
Вишенкова Е.А. Об устойчивости частных решений приближенных уравнений движения тяжелого твердого тела с вибрирующей точкой подвеса // Нелин. дин. 2015. Т. 11. № 3. С. 459–474.
Беличенко М.В., Холостова О.В. Об устойчивости стационарных вращений в приближенной задаче о движении волчка Лагранжа с вибрирующей точкой подвеса // Нелин. дин. 2017. Т. 13. № 1. С. 81–104.
Belichenko M.V. On the stability of pendulum-type motions in the approximate problem of dynamics of a Lagrange top with a vibrating suspension point // Rus. J. Nonlin. Dyn. 2018. V. 14. № 2. P. 243–263.
Kholostova O.V. On the dynamics of a rigid body in the Hess case at high-frequency vibrations of a suspension point // Rus. J. Nonlin. Dyn. 2020. V. 16. № 1. P. 59–84.
Belichenko M.V. Linear orbital stability analysis of the pendulum-type motions of a Kovalevskaya top with a suspension point vibrating horizontally // IOP Conf. Ser.: Mater. Sci. Eng. 2019. V. 489. 012034. P. 1–9.
Kowalevski S. Sur le probleme de la rotation d’un corps solide autour d’un point fixe // Institut Mittag-Leffler: Acta Mathematica. 1889. V. 12. P. 177–232.
Маркеев А.П. Об устойчивости плоских вращений спутника на круговой орбите // Изв. РАН. МТТ. 2006. № 4. С. 63–85.
Ляпунов А.М. Об устойчивости движения в одном частном случае задачи о трех телах. Собр. соч. Т. 1. М.: Изд-во АН СССР, 1954. С. 327–401.
Маркеев А.П. Точки либрации в небесной механике и космодинамике. М.: Наука, 1978. 312 с.
Якубович В.А., Старжинский В.М. Параметрический резонанс в линейных системах. М.: Наука, 1987. 328 с.
Дополнительные материалы отсутствуют.
Инструменты
Прикладная математика и механика